Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (7): 868-876.doi: 10.16183/j.cnki.jsjtu.2021.186
Special Issue: 《上海交通大学学报》2022年“电子信息与电气工程”专题
• Electronic Information and Electrical Engineering • Previous Articles Next Articles
XU Chenhui, YU Fanghui, HE Defeng( )
)
Received:2021-06-02
Online:2022-07-28
Published:2022-08-16
Contact:
HE Defeng
E-mail:hdfzj@zjut.edu.cn.
CLC Number:
XU Chenhui, YU Fanghui, HE Defeng. Disturbance-Blocking-Based Distributed Receding Horizon Estimation of Flexible Joint Robots[J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 868-876.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.186

Fig.1
Single-freedom flexible joint robot
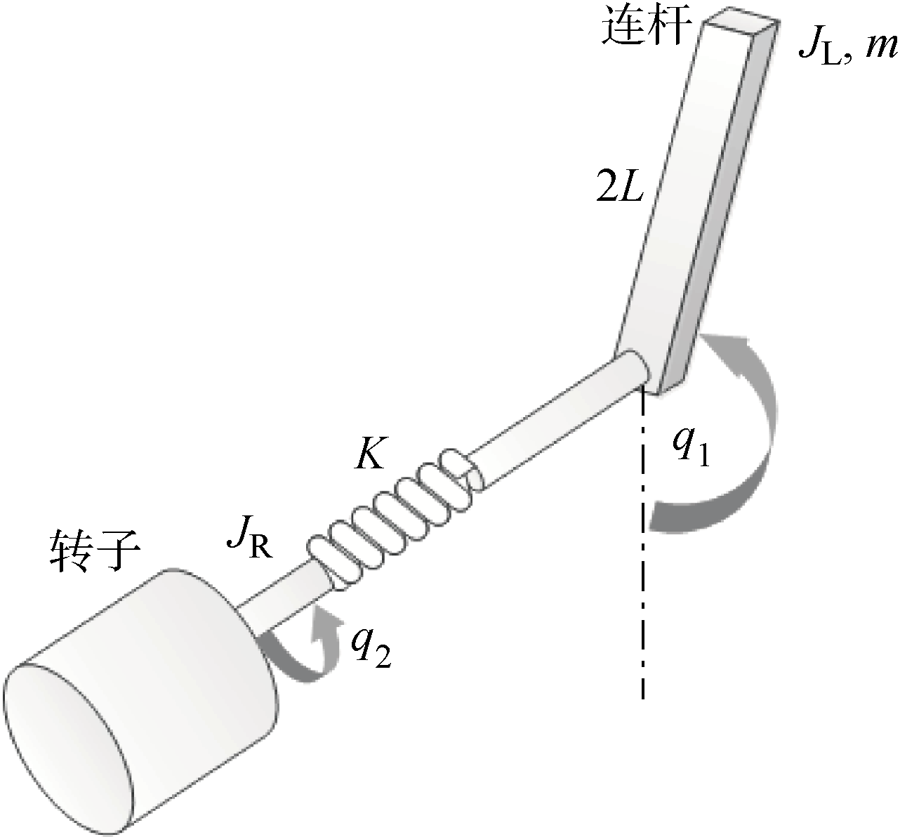
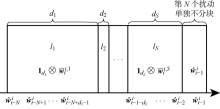
Fig.2
Diagram of blocking-based disturbance
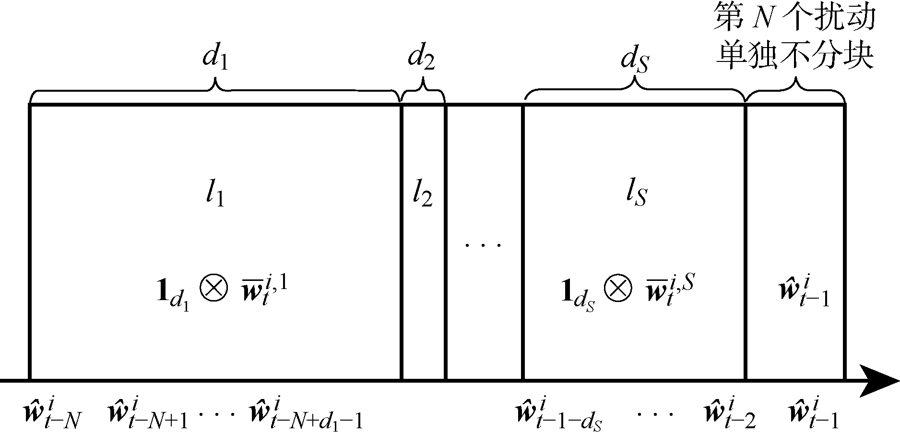
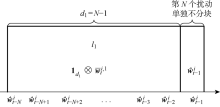
Fig.3
Diagram of disturbance based on maximum blocking
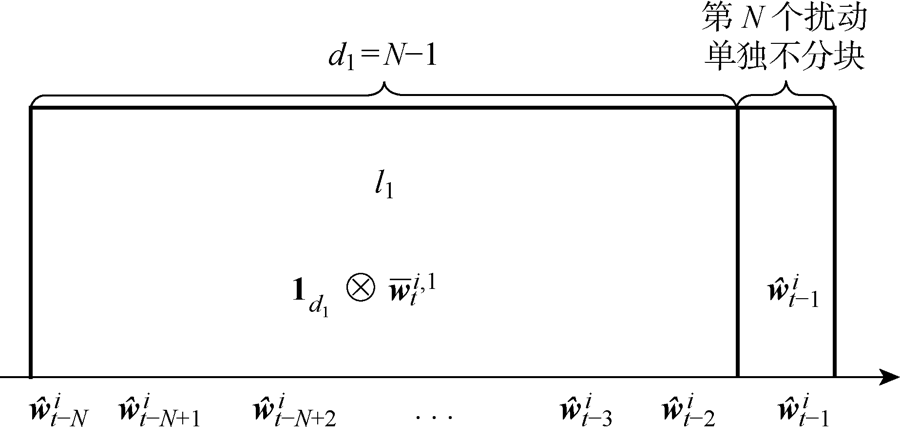
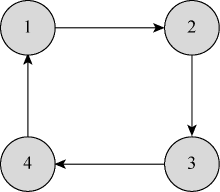
Fig.4
Sensor network
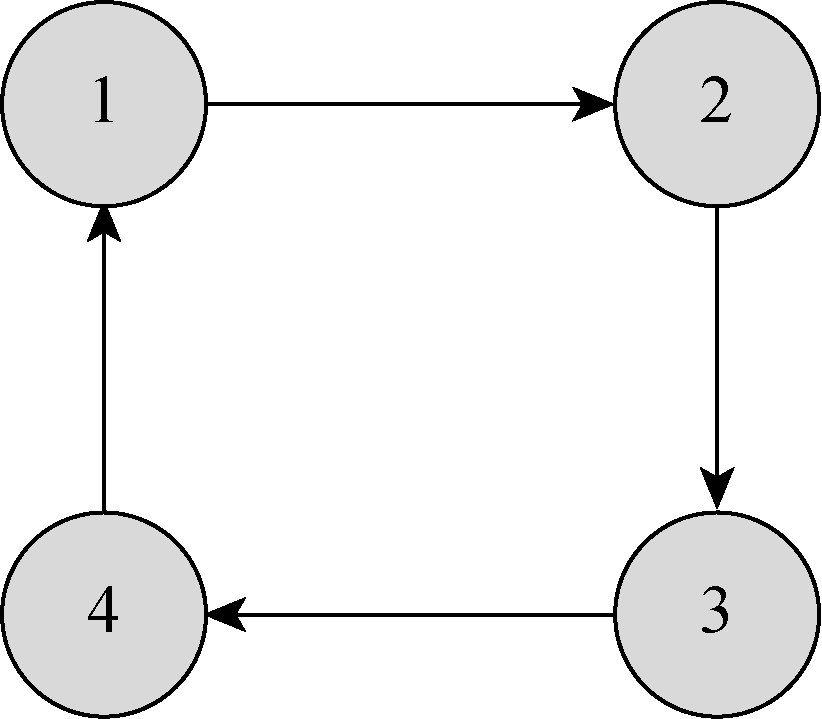
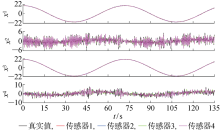
Fig.5
Estimates of state trajectory

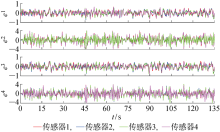
Fig.6
Estimation errors

Tab.1
RMSEs of state component estimation based on algorithm III
| 状态 分量 | 传感器1 误差 | 传感器2 误差 | 传感器3 误差 | 传感器4 误差 |
|---|---|---|---|---|
| x1 | 0.2332 | 0.2239 | 0.2266 | 0.2324 |
| x2 | 1.5689 | 1.2659 | 1.2533 | 1.5555 |
| x3 | 0.2277 | 0.2402 | 0.2441 | 0.2301 |
| x4 | 1.2241 | 1.4518 | 1.4605 | 1.2418 |
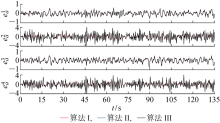
Fig.7
Comparison of average estimation errors of state component based on different algorithms
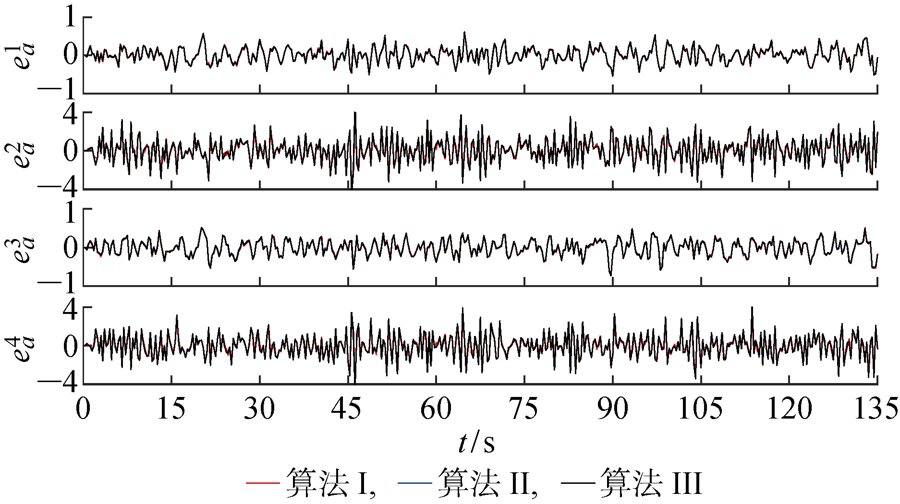
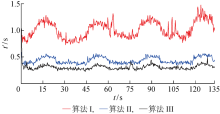
Fig.8
Comparison of ACTs of different algorithms
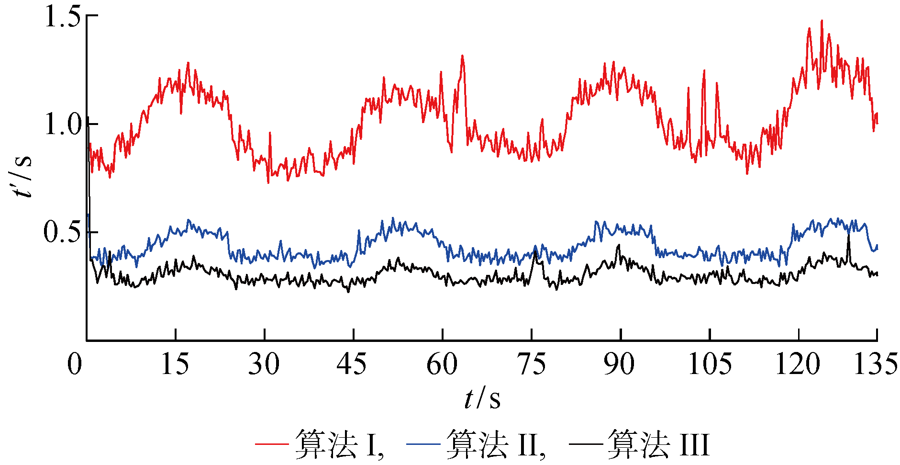
Tab.2
Comparison of ACTs and RMSEs of different algorithms
| 算法 | 传感器1 ACT/s | 传感器2 ACT/s | 传感器3 ACT/s | 传感器4 ACT/s | RMSE |
|---|---|---|---|---|---|
| I | 1.0101 | 1.0272 | 1.0222 | 1.0062 | 0.8318 |
| II | 0.4327 | 0.4382 | 0.4374 | 0.4373 | 0.8318 |
| III | 0.3093 | 0.3072 | 0.3051 | 0.3041 | 0.8318 |
| [1] |
SPONG M W. Modeling and control of elastic joint robots[J]. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4): 310-318.
doi: 10.1115/1.3143860 URL |
| [2] |
KIM M J, BECK F, OTT C, et al. Model-free friction observers for flexible joint robots with torque measurements[J]. IEEE Transactions on Robotics, 2019, 35(6): 1508-1515.
doi: 10.1109/TRO.2019.2926496 URL |
| [3] |
LING S, WANG H Q, LIU P X. Adaptive fuzzy tracking control of flexible-joint robots based on command filtering[J]. IEEE Transactions on Industrial Electronics, 2020, 67(5): 4046-4055.
doi: 10.1109/TIE.2019.2920599 URL |
| [4] |
KIM J, CROFT E A. Full-state tracking control for flexible joint robots with singular perturbation techniques[J]. IEEE Transactions on Control Systems Technology, 2019, 27(1): 63-73.
doi: 10.1109/TCST.2017.2756962 URL |
| [5] |
LIU X, ZHAO F, GE S S, et al. End-effector force estimation for flexible-joint robots with global friction approximation using neural networks[J]. IEEE Transactions on Industrial Informatics, 2019, 15(3): 1730-1741.
doi: 10.1109/TII.2018.2876724 URL |
| [6] | 于仕泽, 王周义, 戴振东, 等. 一种面向航天需求的仿生柔性机械臂的设计[J]. 机械制造与自动化, 2020, 49(1): 134-137. |
| YU Shize, WANG Zhouyi, DAI Zhendong, et al. Design of bionic flexible arm in aerospace demand[J]. Machine Building & Automation, 2020, 49(1): 134-137. | |
| [7] | ZOU S Z, PAN B, FU Y L, et al. Extended high-gain observer based adaptive control of flexible-joint surgical robot[C]∥2016 IEEE International Conference on Robotics and Biomimetics. Qingdao, China: IEEE, 2016: 2128-2133. |
| [8] | 陈晓云. 车载柔性机械臂系统轨迹跟踪补偿控制研究[J]. 自动化与仪器仪表, 2016(6): 90-91. |
| CHEN Xiaoyun. On-board flexible manipulator system trajectory tracking compensation control research[J]. Automation & Instrumentation, 2016(6): 90-91. | |
| [9] |
KIM M J, CHUNG W K. Disturbance-observer-based PD control of flexible joint robots for asymptotic convergence[J]. IEEE Transactions on Robotics, 2015, 31(6): 1508-1516.
doi: 10.1109/TRO.2015.2477957 URL |
| [10] |
LIU X, YANG C G, CHEN Z G, et al. Neuro-adaptive observer based control of flexible joint robot[J]. Neurocomputing, 2018, 275: 73-82.
doi: 10.1016/j.neucom.2017.05.011 URL |
| [11] |
KIM M J, BECK F, OTT C, et al. Model-free friction observers for flexible joint robots with torque measurements[J]. IEEE Transactions on Robotics, 2019, 35(6): 1508-1515.
doi: 10.1109/TRO.2019.2926496 URL |
| [12] |
ZOU L, WANG Z D, HAN Q L, et al. Moving horizon estimation for networked time-delay systems under round-robin protocol[J]. IEEE Transactions on Automatic Control, 2019, 64(12): 5191-5198.
doi: 10.1109/TAC.2019.2910167 URL |
| [13] |
LIU A D, ZHANG W A, CHEN M Z Q, et al. Moving horizon estimation for mobile robots with multirate sampling[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1457-1467.
doi: 10.1109/TIE.2016.2611458 URL |
| [14] |
HAN C Y, LI C C, HE F, et al. Receding horizon estimation for linear discrete-time systems with multi-channel observation delays[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(2): 478-484.
doi: 10.1109/JAS.2018.7511261 URL |
| [15] |
XU Y, ZHOU J Y, RAO H X, et al. Reset moving horizon estimation for quantized discrete time systems[J]. IEEE Transactions on Automatic Control, 2021, 66(9): 4199-4205.
doi: 10.1109/TAC.2020.3037140 URL |
| [16] | 何德峰, 俞芳慧, 徐晨辉. 网联车辆协同巡航系统快速滚动时域状态估计[J]. 控制理论与应用, 2021, 38(4): 457-466. |
| HE Defeng, YU Fanghui, XU Chenhui. Fast receding horizon state estimation of cooperative cruise systems of connected vehicles[J]. Control Theory & Applications, 2021, 38(4): 457-466. | |
| [17] | 刘帅, 赵国荣, 曾宾, 等. 带丢包和量化的参数不确定系统滚动时域估计[J]. 系统工程与电子技术, 2020, 42(4): 912-918. |
| LIU Shuai, ZHAO Guorong, ZENG Bin, et al. Moving horizon estimation for uncertain systems with packet dropouts and quantization[J]. Systems Engineering and Electronics, 2020, 42(4): 912-918. | |
| [18] | 刘帅, 赵国荣, 曾宾, 等. 测量数据丢失的随机不确定系统滚动时域估计[J]. 控制与决策, 2021, 36(2): 450-456. |
| LIU Shuai, ZHAO Guorong, ZENG Bin, et al. Moving horizon estimation for stochastic uncertain system with missing measurements[J]. Control and Decision, 2021, 36(2): 450-456. | |
| [19] |
FARINA M, FERRARI-TRECATE G, SCATTOLINI R. Distributed moving horizon estimation for linear constrained systems[J]. IEEE Transactions on Automatic Control, 2010, 55(11): 2462-2475.
doi: 10.1109/TAC.2010.2046058 URL |
| [20] |
BATTISTELLI G. Distributed moving-horizon estimation with arrival-cost consensus[J]. IEEE Transactions on Automatic Control, 2019, 64(8): 3316-3323.
doi: 10.1109/TAC.2018.2879598 URL |
| [21] |
YIN X Y, LIU J F. Distributed moving horizon state estimation of two-time-scale nonlinear systems[J]. Automatica, 2017, 79: 152-161.
doi: 10.1016/j.automatica.2017.01.023 URL |
| [22] | LI H P, SHI Y, YAN W S. Distributed receding horizon estimation for sensor networks with improved consensus strategy[C]∥Proceedings of the 33rd Chinese Control Conference. Nanjing, China: IEEE, 2014: 316-321. |
| [23] | VENTURINO A, BERTRAND S, MANIU C S, et al. Distributed moving horizon estimation with pre-estimating observer[C]∥2020 24th International Conference on System Theory, Control and Computing. Sinaia, Romania: IEEE, 2020: 174-179. |
| [24] |
ZENG J, LIU J F. Distributed moving horizon state estimation: Simultaneously handling communication delays and data losses[J]. Systems & Control Letters, 2015, 75: 56-68.
doi: 10.1016/j.sysconle.2014.11.007 URL |
| [25] |
LEE J H, CHIKKULA Y, YU Z H, et al. Improving computational efficiency of model predictive control algorithm using wavelet transformation[J]. International Journal of Control, 1995, 61(4): 859-883.
doi: 10.1080/00207179508921935 URL |
| [26] |
CAGIENARD R, GRIEDER P, KERRIGAN E C, et al. Move blocking strategies in receding horizon control[J]. Journal of Process Control, 2007, 17(6): 563-570.
doi: 10.1016/j.jprocont.2007.01.001 URL |
| [27] |
SHEKHAR R C, MANZIE C. Optimal move blocking strategies for model predictive control[J]. Automatica, 2015, 61: 27-34.
doi: 10.1016/j.automatica.2015.07.030 URL |
| [28] |
SON S H, OH T H, KIM J W, et al. Move blocked model predictive control with improved optimality using semi-explicit approach for applying time-varying blocking structure[J]. Journal of Process Control, 2020, 92: 50-61.
doi: 10.1016/j.jprocont.2020.04.002 URL |
| [29] |
JUNG T Y, JANG H, LEE J H. Move blocking strategy applied to re-entrant manufacturing line scheduling[J]. International Journal of Control, Automation and Systems, 2015, 13(2): 410-418.
doi: 10.1007/s12555-014-0243-9 URL |
| [1] | ZHOU Tianlong, YAO Fangjing, RAO Weixiong. Target State Estimation Algorithms Under Partially Known State Space Models [J]. Air & Space Defense, 2025, 8(3): 111-122. |
| [2] | ZANG Hongyan, XIE Xiaolong, XU Yazhou, TAO Ye, GAO Changsheng. Hypersonic Maneuvering Target State Estimation Algorithm Based on Recurrent Neural Network [J]. Air & Space Defense, 2024, 7(4): 88-98. |
| [3] | LIU Yuming, ZHAO Yong, DONG Zhengjian, WANG Ping, JI Yuqi. Formation Control Strategy of Multiple Mobile Robots Cooperative Operation Based on Backstepping Method [J]. Journal of Shanghai Jiao Tong University, 2023, 57(1): 103-115. |
| [4] | YAN Zheng,KONG Xiangrui,XU Xiaoyuan,XIE Wei. Applications of Micro Synchronous Phasor Measurement Units in State Estimation of Smart Distribution Network [J]. Journal of Shanghai Jiao Tong University, 2018, 52(10): 1195-1205. |
| [5] | LI Xiongjie1,2,ZHOU Donghua2. Fault Diagnosis Based on Particle Filter for Hybrid System [J]. Journal of Shanghai Jiaotong University, 2015, 49(06): 849-854. |
| [6] | KONG Qing-jie, CHEN Yi-kai, LIU Yun-cai. RealTime Traffic State Estimation Based on Evidential Fusion [J]. Journal of Shanghai Jiaotong University, 2008, 42(10): 1682-1686. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||