Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (2): 149-160.doi: 10.16183/j.cnki.jsjtu.2020.047
Special Issue: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“工程力学”专题
Previous Articles Next Articles
ZHANG Liwen, XU Qiping, LIU Jinyang( )
)
Received:2020-02-20
Online:2021-02-01
Published:2021-03-03
Contact:
LIU Jinyang
E-mail:liujy@sjtu.edu.cn
CLC Number:
ZHANG Liwen, XU Qiping, LIU Jinyang. Modeling and Simulation of an Inchworm-Like Soft Robot[J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 149-160.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.047

Fig.1
Soft inchworm-like robot


Fig.2
Slider-curved beam model
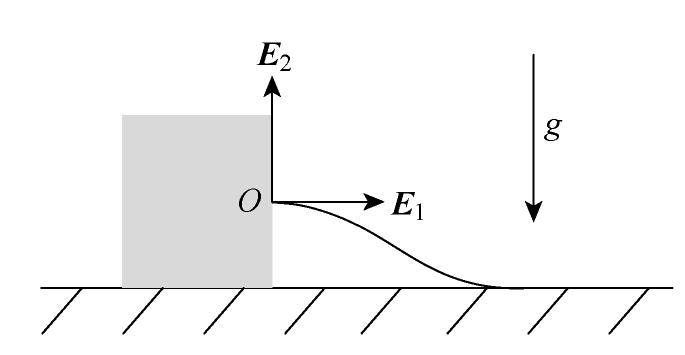
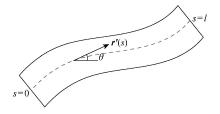
Fig.3
Tangential vectorr′(s)
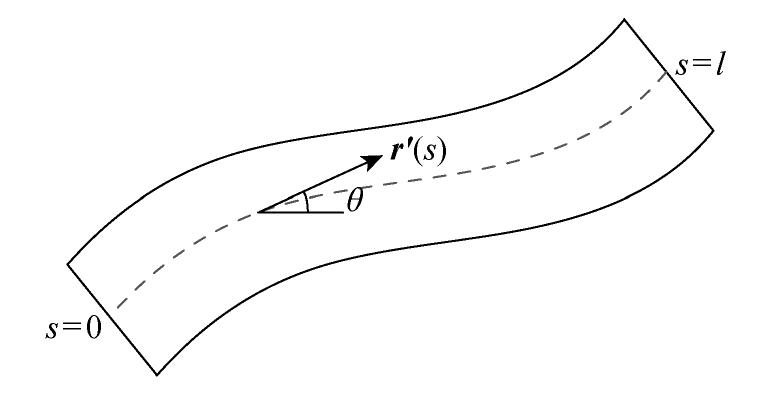
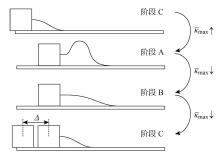
Fig.4
Three stages in a motion cycle
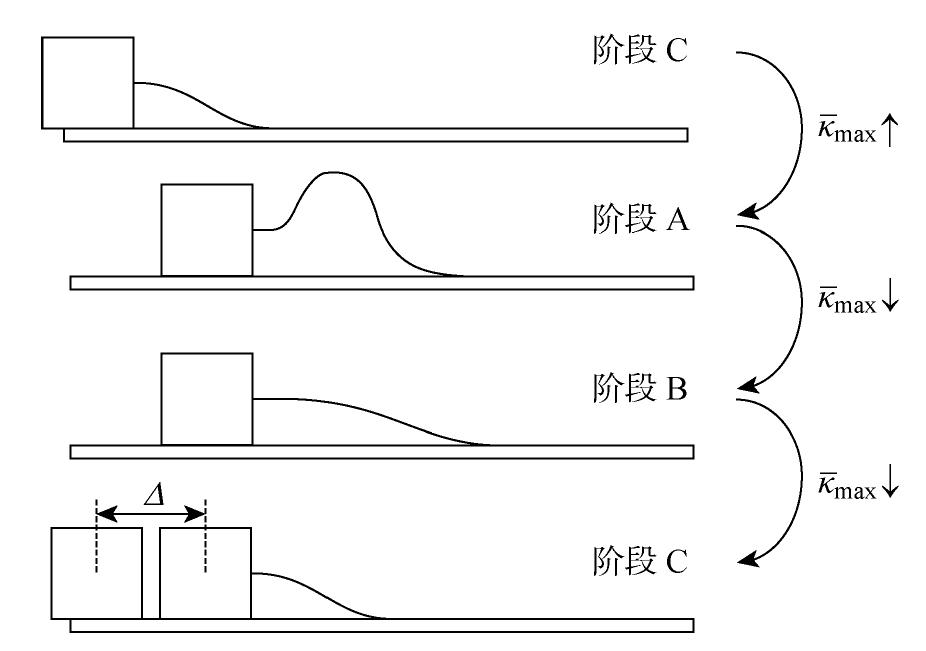
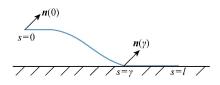
Fig.5
External force on curved beam when in line contact with the ground
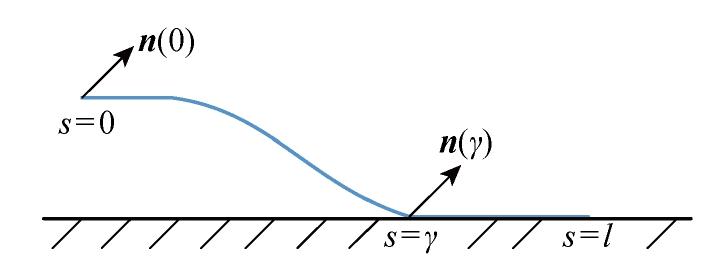
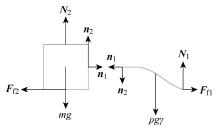
Fig.6
Static equilibrium analysis of slider-curved beam system in phase B
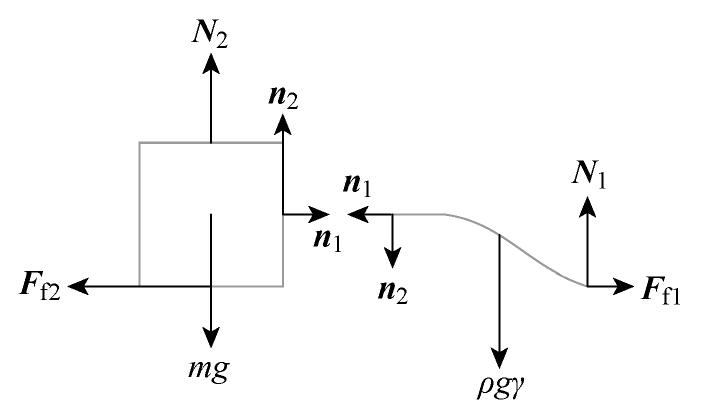

Fig.7
Static equilibrium analysis of slider-curved beam system in phase C
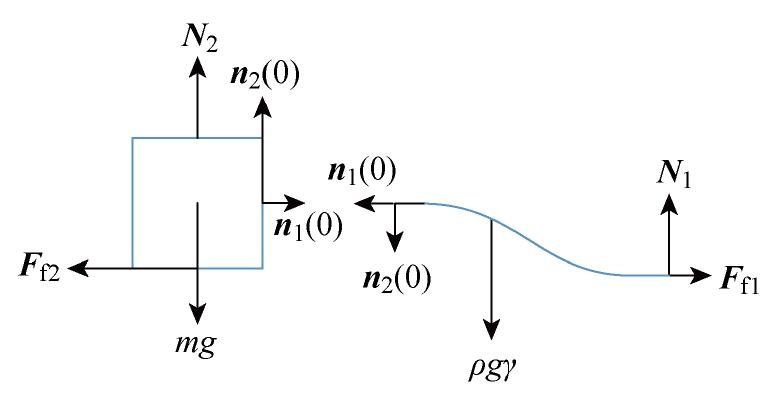

Fig.8
Discrete configuration of curved beam when in point contact with the ground
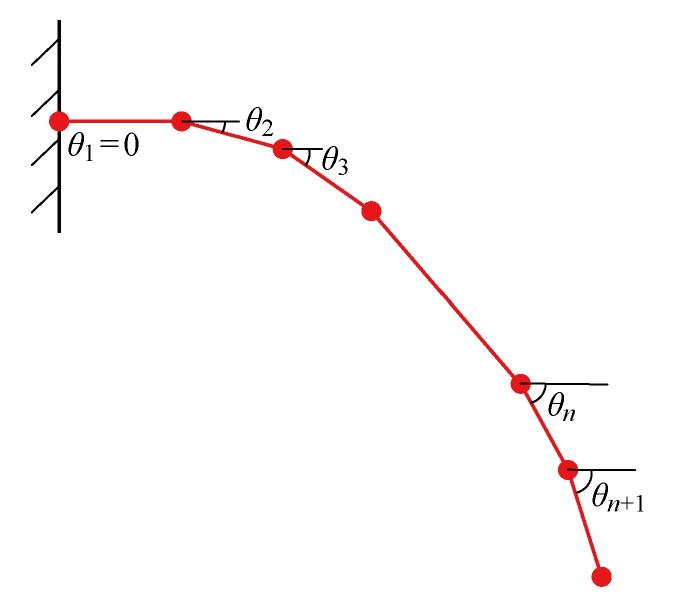

Fig.9
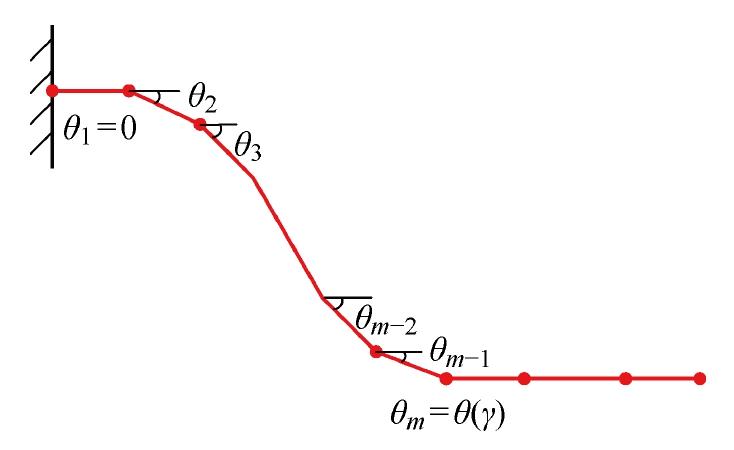
Discrete configuration of curved beam when in line contact with the ground
Tab.1
Dimensionalization of physical quantities
| 物理量 | 量纲 | 无量纲化 | 无量纲化物理量 |
|---|---|---|---|
| s,h,d,x,y,γ | L′ | s/l,h/l,d/l,x/l,y/l,γ/l |  |
| ms | FT2L′-1 | ms/ρl | Ms |
| EI | FL′2 | EI/ρgl | D |
| N1,Ff1 | F | N1/ρgl,Ff1/ρgl |  |
| ω | F | ω/ρgl | Wad |
| n2(γ),n1(γ) | F | n2(γ)/ρgl,n1(γ)/ρgl |  |
| κ0 | L′-1 |  |  |
 | L′-2 |  |  |
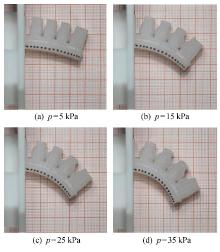
Fig.10
Deformed states of soft actuator subject to different air pressure loads
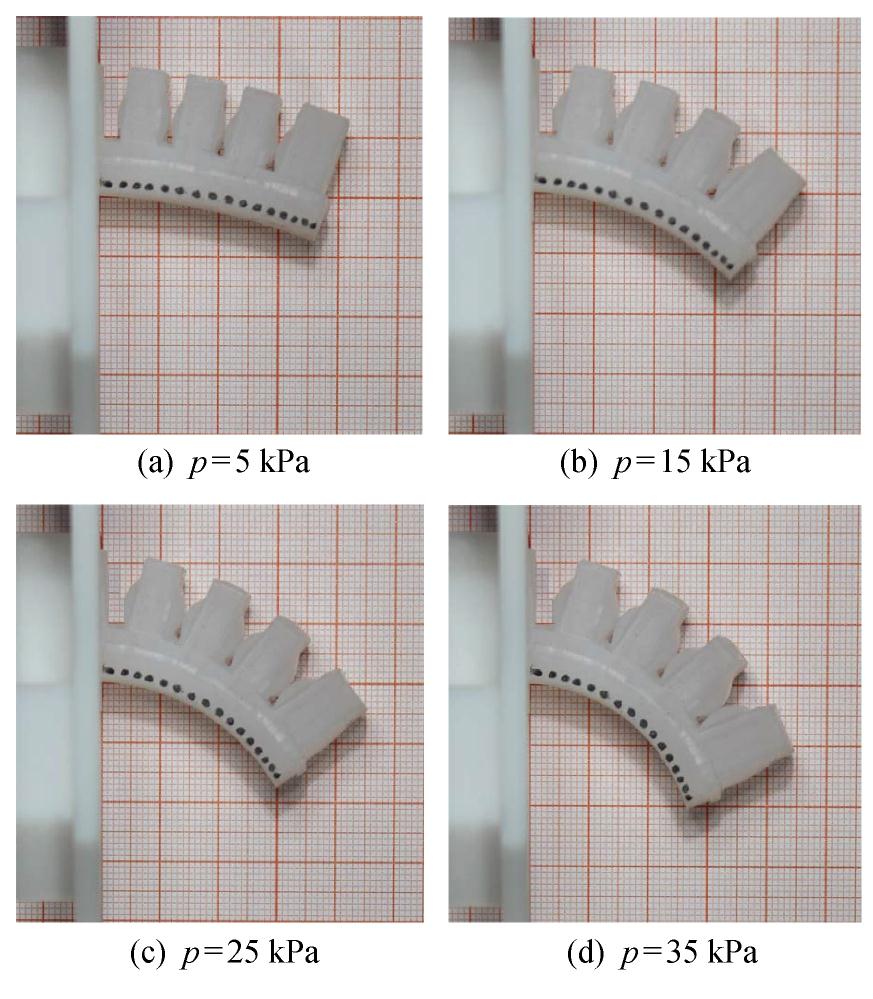

Fig.11
Comparisons of deformation state of soft actuator obtained by experiment and simulation
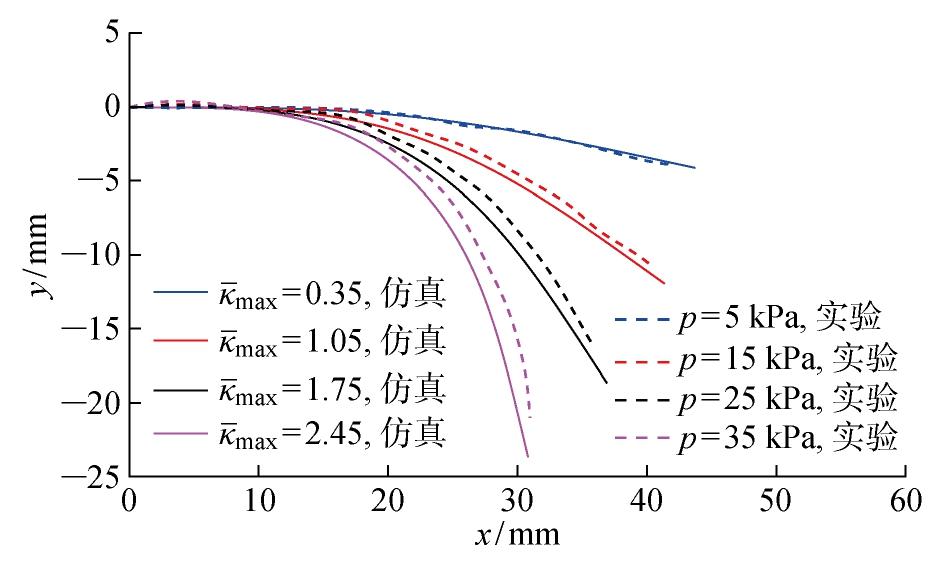
Fig.12
Soft robot in experiment
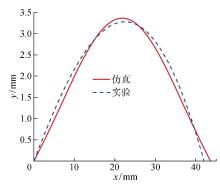
Fig.13
Experimental and simulation results of soft robot shape att=2 s

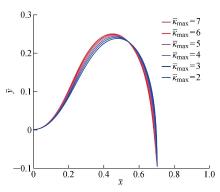
Fig.14
Configuration diagram in phase A at ∈[2,7]
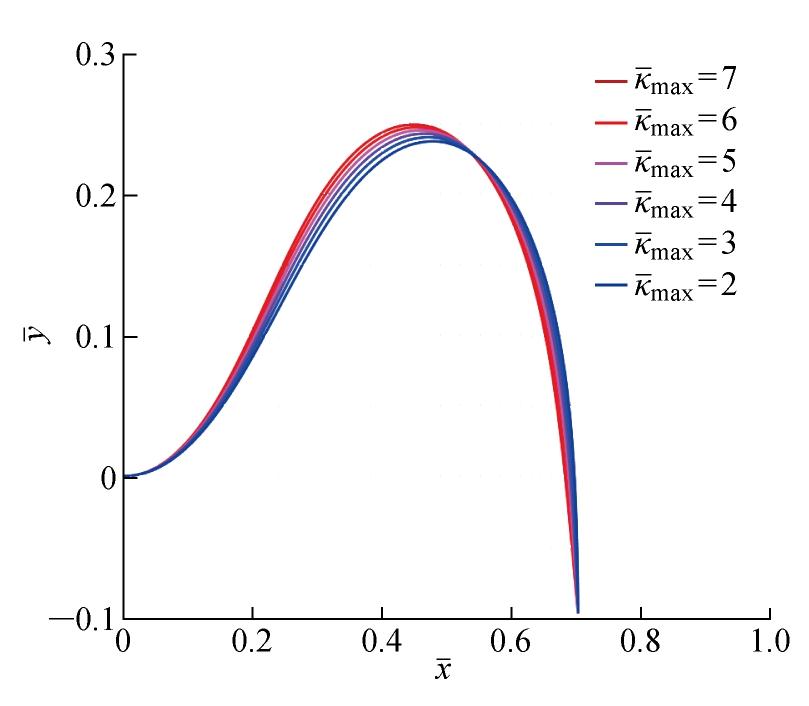
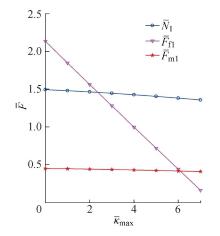
Fig.15
External force of right end of curved beam versus in phase A

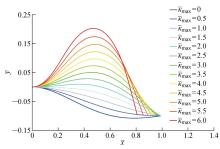
Fig.16
Configuration diagram in phase B at ∈[0,6]


Fig.17
External force of slider-curved beam system versus in phase B
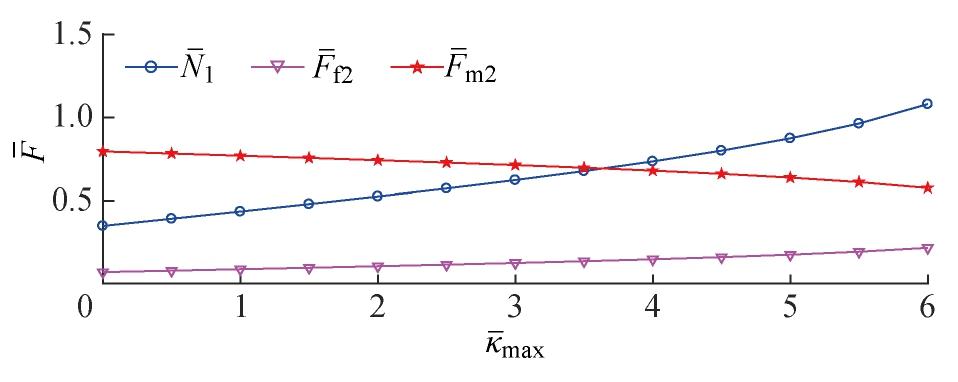

Fig.18
versus in phase B
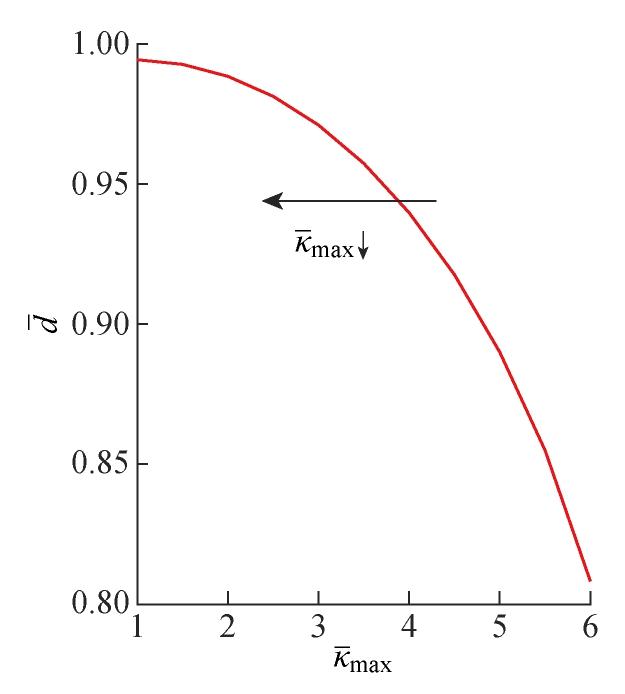
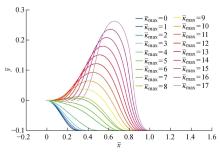
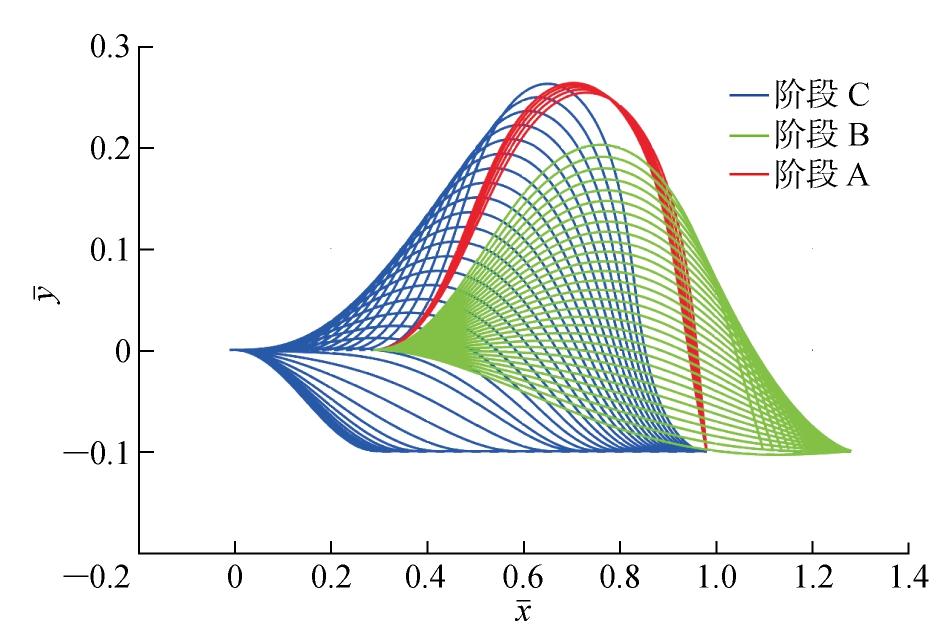
Fig.19
Configuration diagram in phase C at ∈[0,17]
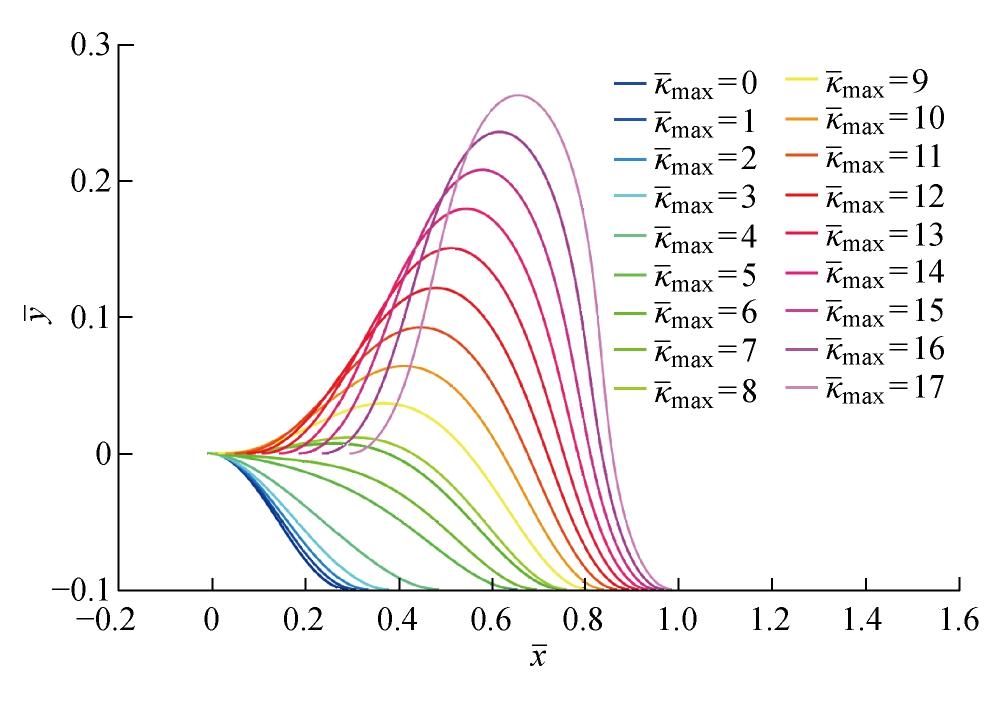

Fig.20
Slider displacement versus in phase C
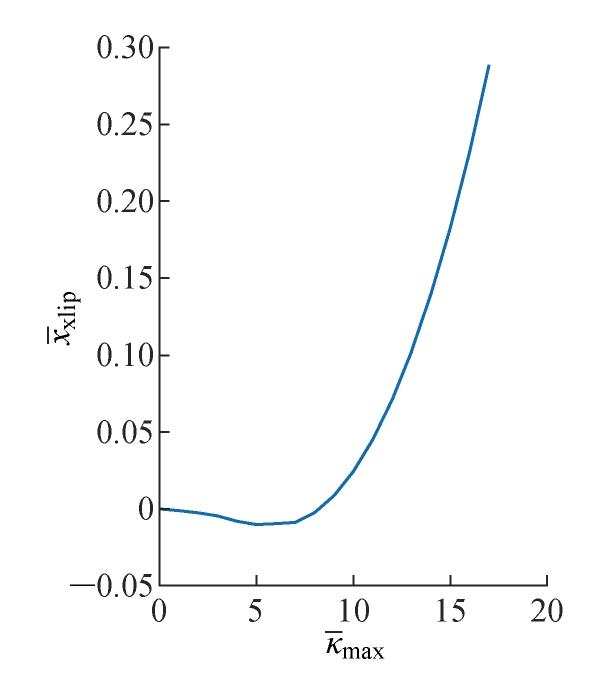
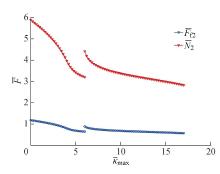
Fig.21
External force at the slider versus in phase C
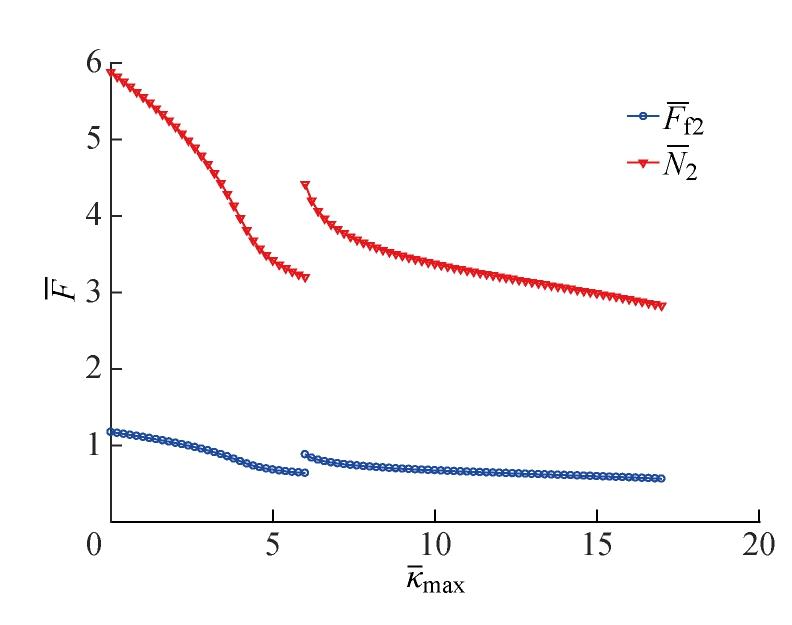
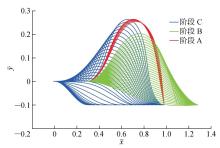
Fig.22
Configuration changes of curved beams during the entire motion cycle
| [1] | 胡兵兵,金国庆. 一种仿虎甲幼虫的多驱动器软体机器人的设计与制造[J]. 机器人,2018, 40(5): 52-59. |
| HU Bingbing, JIN Guoqing. Design and fabrication of a multi-actuator soft robot inspired by young tiger beetle[J]. Robot, 2018, 40(5): 52-59. | |
| [2] | 费燕琼,吕海洋,沈星尧. 模块化软体机器人运动模式[J]. 上海交通大学学报,2013, 47(12): 1870-1873. |
| FEI Yanqiong, LV Haiyang, SHEN Xingyao. Moving mode of modular soft robot[J]. Journal of Shanghai Jiao Tong University, 2013, 47(12): 1870-1873. | |
| [3] | 张润玺,王贺升,陈卫东. 仿章鱼软体机器人形状控制[J]. 机器人,2016, 38(6): 754-759. |
| ZHANG Runxi, WANG Hesheng, CHEN Weidong. Shape control for a soft robot inspired by octopus[J]. Robot, 2016, 38(6): 754-759. | |
| [4] | LI C, XIE Y, HUANG X, et al. Novel dielectric elastomer structure of soft robot[J]. Proceedings of SPIE-The International Society for Optical Engineering, 2015, 9430: 943021. |
| [5] | RAFSANJANI A, ZHANG Y, LIU B, et al. Kirigami skins make a simple soft actuator crawl[J]. Science Robotics, 2018, 3(15): 7555. |
| [6] | 邵城. 环纵肌复合的气动仿蠕虫软体机器人技术研究[D]. 南京: 南京理工大学,2018. |
| SHAO Cheng. Development of the pneumatic-driven earthworm-like soft robot with circular-longitudinal compound muscles[D]. Nanjing: Nanjing University of Science and Technology, 2018. | |
| [7] | SUZUMORI K, ENDO S, KANDA T, et al. A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot[C]∥Proceedings 2007 IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2007: 4975-4980. |
| [8] | MAO S X, DONG E B, JIN H, et al. Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by SMAs[J]. Journal of Bionic Engineering, 2014, 11(3): 400-411. |
| [9] | BARTLETT N W, TOLLEY M T, OVERVELDE J T B, et al. A 3D-printed, functionally graded soft robot powered by combustion[J]. Science, 2015, 349(6244): 161-165. |
| [10] | CIANCHETTI M, CALISTI M, MARGHERI L, et al. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot[J]. Bioinspiration & Biomimetics, 2015, 10(3): 035003. |
| [11] | MARCHESE A D, ONAL C D, RUS D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators[J]. Soft Robotics, 2014, 1(1): 75-87. |
| [12] | LIN H T, LEISK G G, TRIMMER B. GoQBot: A caterpillar-inspired soft-bodied rolling robot[J]. Bioinspiration & Biomimetics, 2011, 6(2): 026007. |
| [13] | JUNG K, KOO J C, NAM J D, et al. Artificial annelid robot driven by soft actuators[J]. Bioinspiration & Biomimetics, 2007, 2(2): S42-S49. |
| [14] | 王江北,方晔阳,童歆,等. 多气囊仿生软体机器人设计及其运动特性分析[J]. 上海交通大学学报,2018, 52(1): 20-25. |
| WANG Jiangbei, FANG Yeyang, TONG Xin, et al. Design and locomotion properties of a multi-airbag bionic soft robot[J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 20-25. | |
| [15] | SHEPHERD R F, ILIEVSKI F, CHOI W, et al. Multigait soft robot[J]. PNAS, 2011, 108(51): 20400-20403. |
| [16] | TOLLEY M T, SHEPHERD R F, MOSADEGH B, et al. A resilient, untethered soft robot[J]. Soft Robotics, 2014, 1(3): 213-223. |
| [17] | MAJIDI C, O’REILLY O M, WILLIAMS J A. On the stability of a rod adhering to a rigid surface: Shear-induced stable adhesion and the instability of peeling[J]. Journal of the Mechanics and Physics of Solids, 2012, 60(5): 827-843. |
| [18] | MAJIDI C, O’REILLY O M, WILLIAMS J A. Bifurcations and instability in the adhesion of intrinsically curved rods[J]. Mechanics Research Communications, 2013, 49: 13-16. |
| [19] | MAJIDI C, SHEPHERD R F, KRAMER R K, et al. Influence of surface traction on soft robot undulation[J]. The International Journal of Robotics Research, 2013, 32(13): 1577-1584. |
| [20] | ZHOU X C, MAJIDI C, O’REILLY O M. Flexing into motion: A locomotion mechanism for soft robots[J]. International Journal of Non-Linear Mechanics, 2015, 74: 7-17. |
| [21] | DE PAYREBRUNE K M, O’REILLY O M. On constitutive relations for a rod-based model of a pneu-net bending actuator[J]. Extreme Mechanics Letters, 2016, 8: 38-46. |
| [22] | MATIA Y, GAT A D. Dynamics of elastic beams with embedded fluid-filled parallel-channel networks[J]. Soft Robotics, 2015, 2(1): 42-47. |
| [23] | POLYGERINOS P, LYNE S, WANG Z, et al. Towards a soft pneumatic glove for hand rehabilitation[C]∥2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2013: 1512-1517. |
| [1] | LI Chunyang, ZHU Xiaoqing, RUAN Xiaogang, LIU Xinyuan, ZHANG Siyuan. Gait Learning Reproduction for Quadruped Robots Based on Experience Evolution Proximal Policy Optimization [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1125-1133. |
| [2] | HE Guisong (贺贵松), HUANG Xuegong* (黄学功),LI Feng(李峰). Coordination Design of a Power-Assisted Ankle Exoskeleton Robot Based on Active-Passive Combined Drive [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 197-208. |
| [3] | XU Ziwei (徐子薇), XIE Le (谢叻). Cable-Driven Flexible Exoskeleton Robot for Abnormal Gait Rehabilitation [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(2): 231-239. |
| [4] | YU Liang (余亮), YAN Li (严莉), CHEN Mengjie (陈梦婕), DONG Liangchao (董良超). Cyclostationary Modeling of Surface Electromyography Signal During Gait Cycles and Its Application for Cerebral Palsy Diagnosis [J]. Journal of Shanghai Jiao Tong University (Science), 2018, 23(Sup. 1): 56-61. |
| [5] |
LI Dong1,ZHANG Chen1,WANG Fuxin1,LIU Hong1,YANG Kun2.
An Investigation on the Characteristics of Supercooled Large Droplet Icing Accretions and Aerodynamic Effects on HighLift Configuration [J]. Journal of Shanghai Jiao Tong University, 2017, 51(8): 921-931. |
| [6] | FANG Juan (方娟), XIE Le (谢叻), YANG Guo-yuan* (杨国源). Review on the Interlimb Neural Coupling and Its Potential Usage in Walking Rehabilitation [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(5): 561-564. |
| [7] | JIA Bin1,ZHANG Qilin1,YANG Bin1,LV Jia1,LU Jiasen2,ZHENG Zhenpeng2. Experimental Study of Seismic Behavior of Prefabricated Reinforced Concrete Frame with Infill Slit Shear Walls [J]. Journal of Shanghai Jiaotong University, 2014, 48(11): 1580-1587. |
| [8] | WU Chao* (吴 超), GE Tong (葛 彤), ZHUANG Guang-jiao (庄广胶), LIU Jian-min (刘建民). Research of Underwater Self-Reconfigurable System [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(1): 35-40. |
| [9] | LI Jia-wang (李家旺), WU Chao (吴 超), GE Tong* (葛 彤). Central Pattern Generator Based Gait Control for Planar Quadruped Robots [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(1): 1-10. |
| [10] | ZHANG Min (张旻), QU Pei-yu (瞿佩育), FENG Mei-lan (冯美兰), JIANG Lan (江澜), SHEN Xiao-yan (沈晓艳), MA Yan-hong (马燕红), BAI Yue-hong (白跃宏). Effectiveness of Different Orthoses on Joint Moments in Patients with Early Knee Osteoarthritis: Lateral Wedge Versus Valgus Knee Bracing [J]. Journal of shanghai Jiaotong University (Science), 2012, 17(4): 505-510. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||