Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (6): 809-817.doi: 10.16183/j.cnki.jsjtu.2021.060
Special Issue: 《上海交通大学学报》2022年“机械与动力工程”专题
• Mechanical Engineering • Previous Articles Next Articles
WU Guanlun, SHI Guanglin( )
)
Received:2021-02-26
Online:2022-06-28
Published:2022-07-04
Contact:
SHI Guanglin
E-mail:glshi@263.net
CLC Number:
WU Guanlun, SHI Guanglin. Design and Realization of Continuum Manipulator Based on Coupling of Double Parallel Mechanism[J]. Journal of Shanghai Jiao Tong University, 2022, 56(6): 809-817.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.060
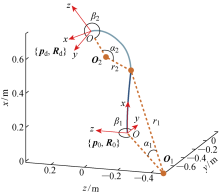
Fig.1
Simulation of two-arc model
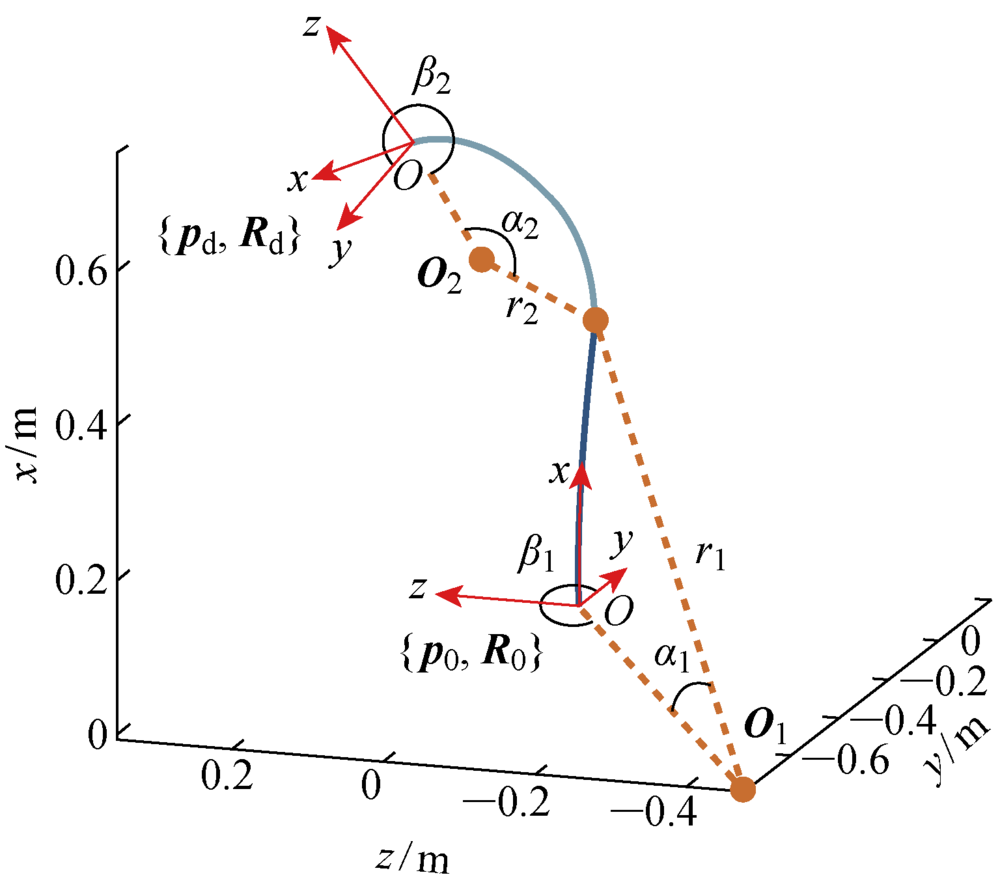
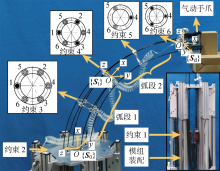
Fig.2
Structure of parallel continuum manipulator
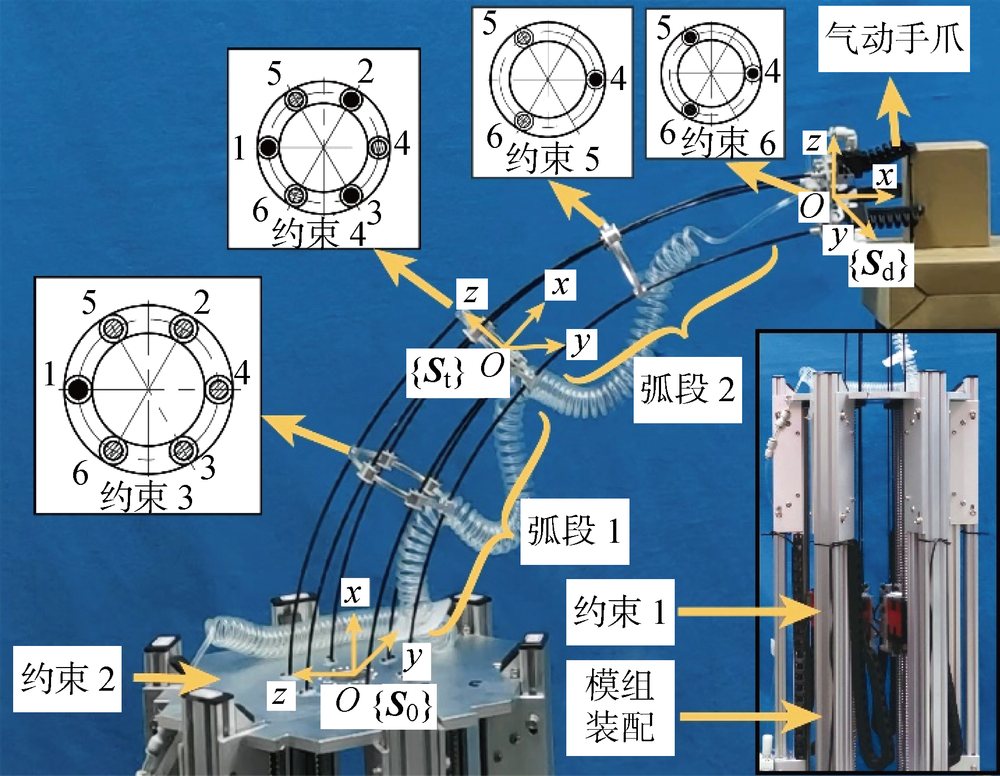

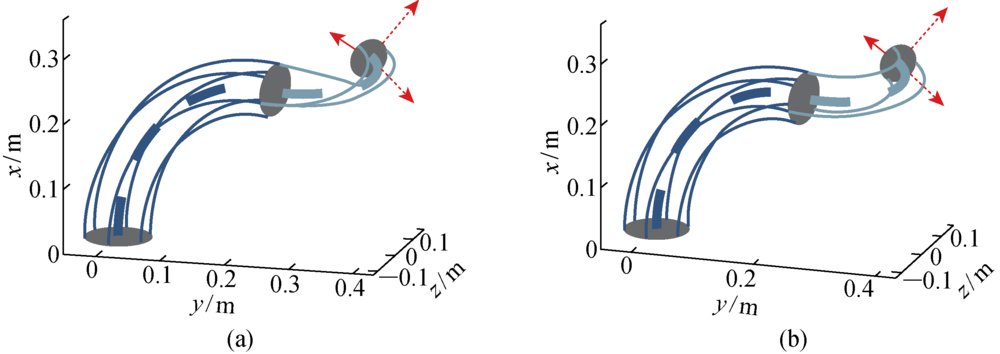
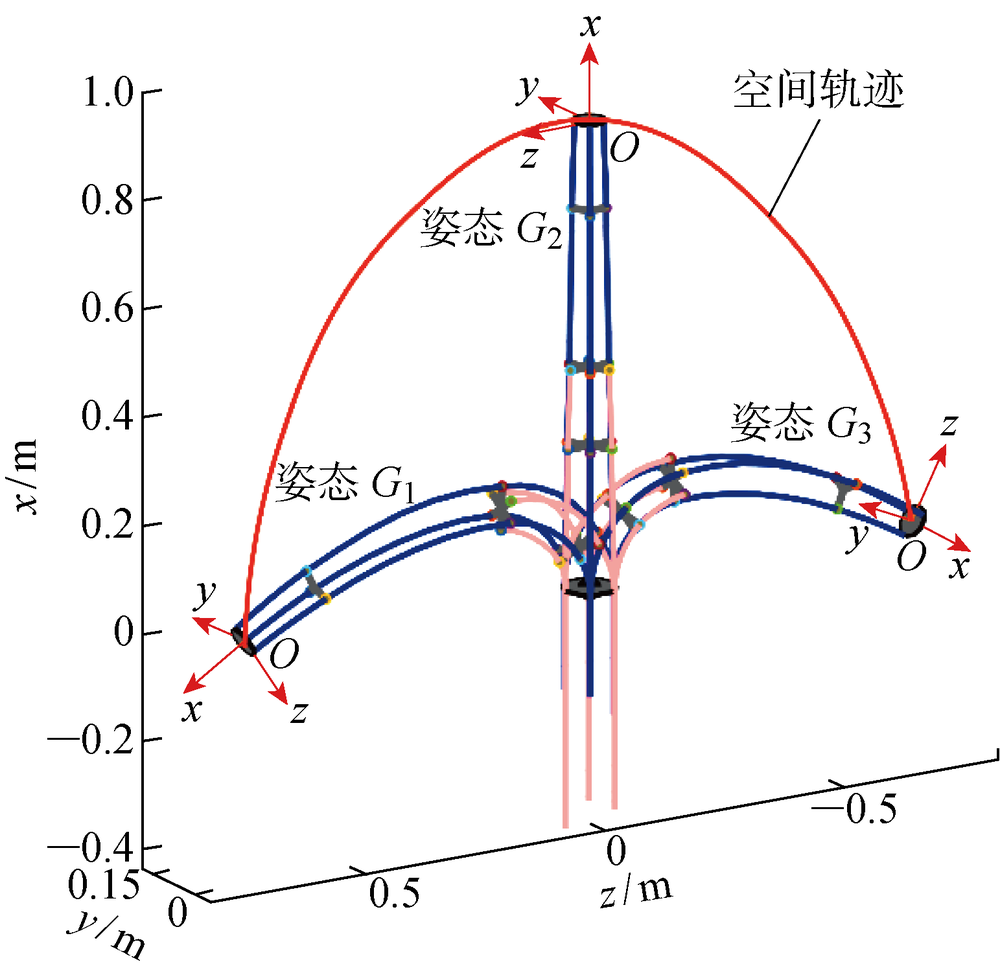
Fig.3
Poses of two-arc-model kinematics of parallel continuum manipulator
Tab.1
Design parameters of constraint disks and rods
| j | ρj/ mm | θj,i/(°) |
|---|---|---|
| 1 | 50 | 90, 330, 210, 270, 30, 150 |
| 2 | 50 | 90, 330, 210, 270, 30, 150 |
| 3 | 45 | 90, 330, 210, 270, 30, 150 |
| 4 | 40 | 90, 330, 210, 270, 30, 150 |
| 5 | 35 | 270, 30, 150 |
| 6 | 30 | 270, 30, 150 |
Tab.2
Mechanical properties of hyper-elastic rod
| 特性 | 取值 |
|---|---|
| 材料 | 玻璃纤维 |
| 直径/mm | 3 |
| 密度/(kg·m-3) | 1.96×103 |
| 弹性模量/Pa | 4.1×1010 |
Tab.3
Parameters of slide module
| 参数 | 取值 |
|---|---|
| 有效行程/mm | 600 |
| 导程/mm | 10 |
| 滑块额定速度/(mm·s-1) | 500 |
| 滑块推荐加速度/(mm·s-2) | 500 |
| 定位精度/mm | 0.05 |
Fig.4
Trapezoidal speed-time curve of motor
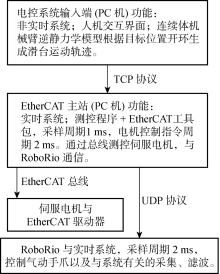
Fig 5
Illustration of electronic control system structure
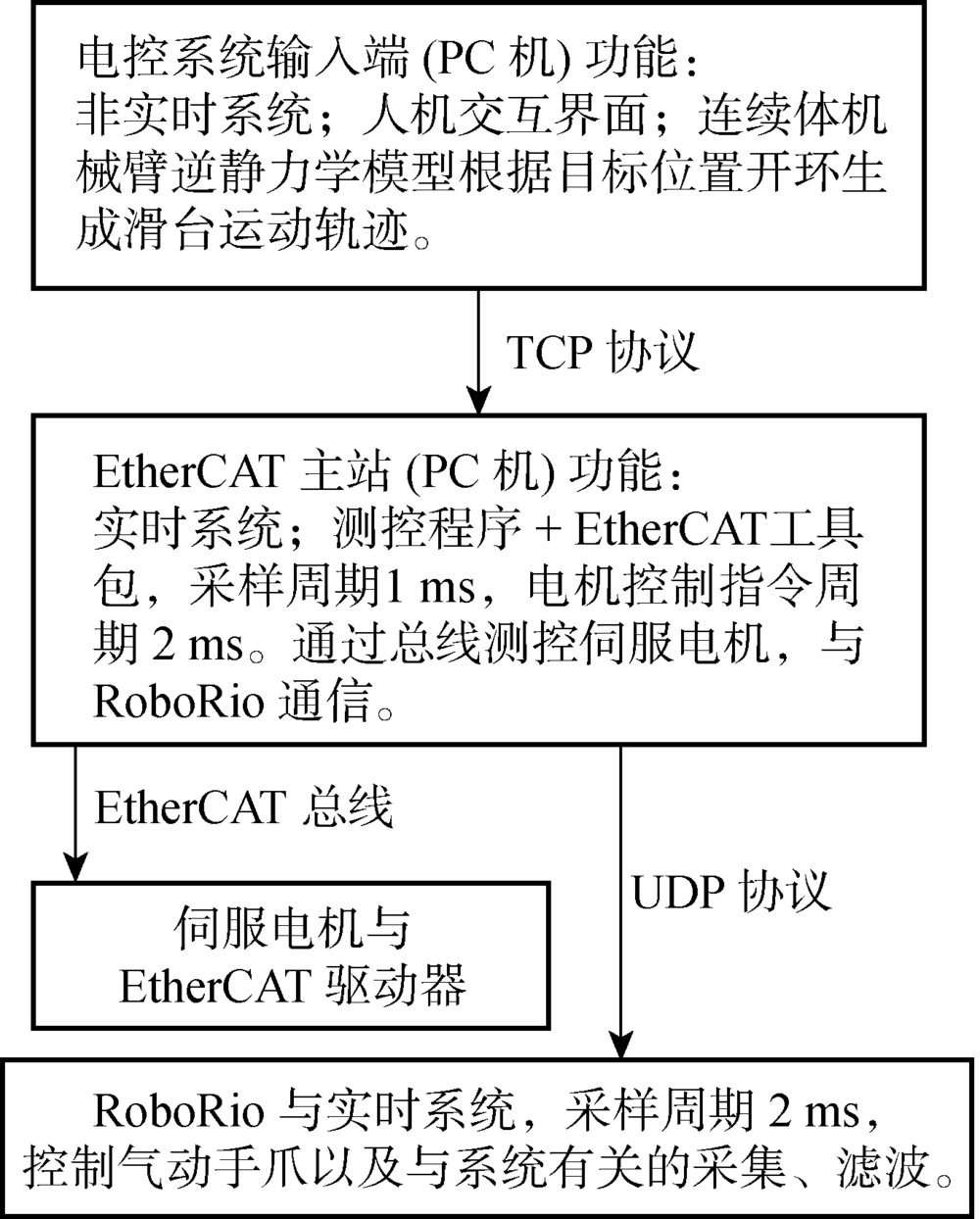
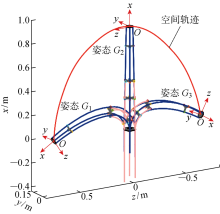
Fig 6
Illustration of extreme poses
Tab.4
Key frames of 180° bending pose
| x/mm | y/mm | z/mm | Rd,x1 | Rd,x2 | Rd,x3 |
|---|---|---|---|---|---|
| 663 | 0 | 0 | 1 | 0 | 0 |
| 300 | 0 | -400 | 0 | 0 | -1 |
| 60 | 0 | -450 | -1 | 0 | 0 |
| 0 | 0 | -420 | -1 | 0 | 0 |

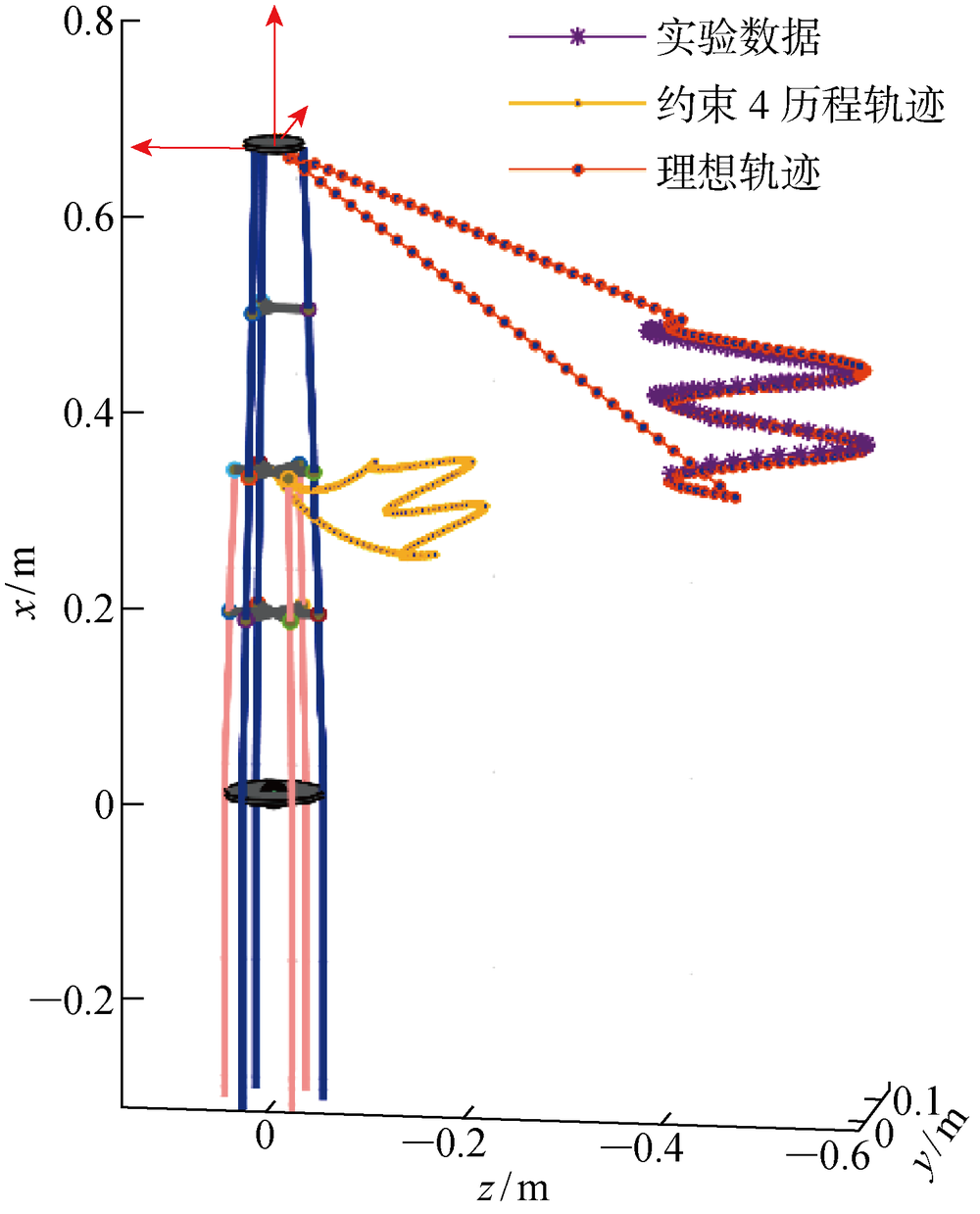
Fig.7
Experiment of fast open-loop trajectory
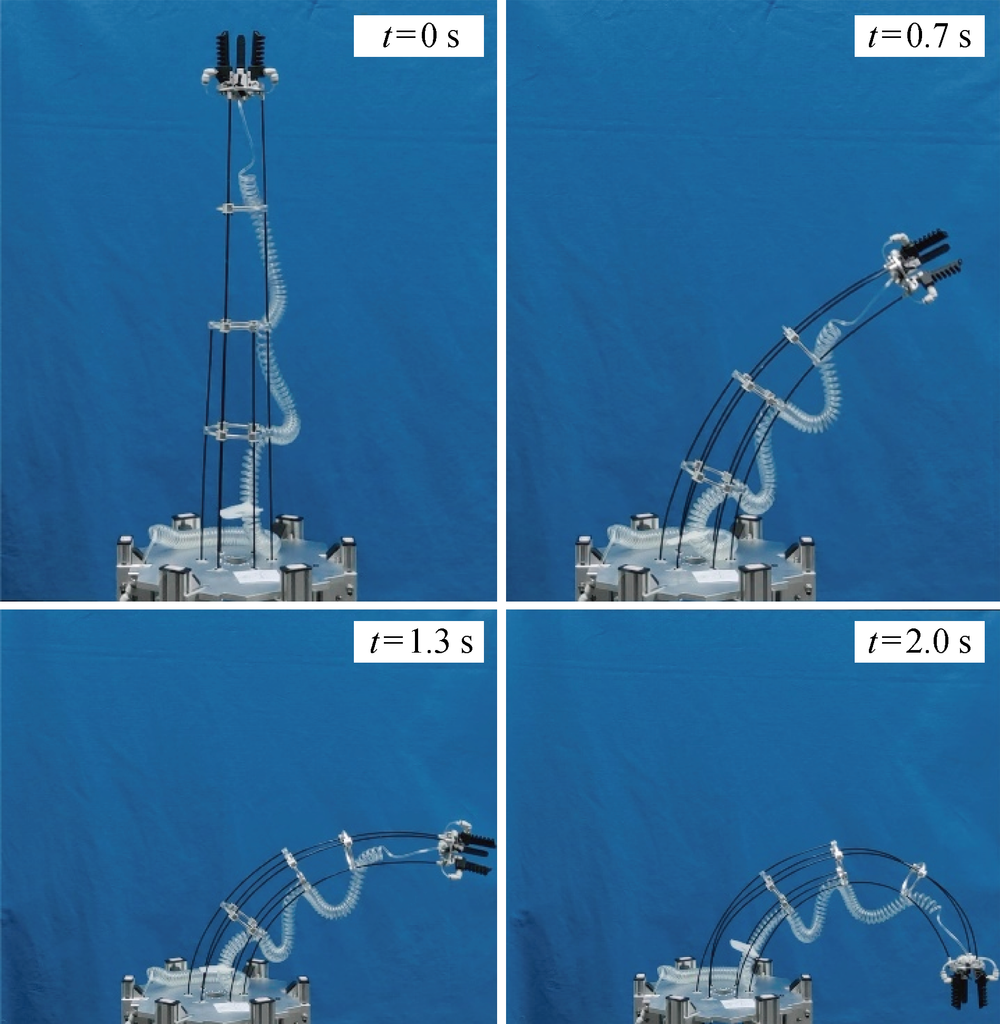
Fig.8
Five degree-of-freedom location experiment
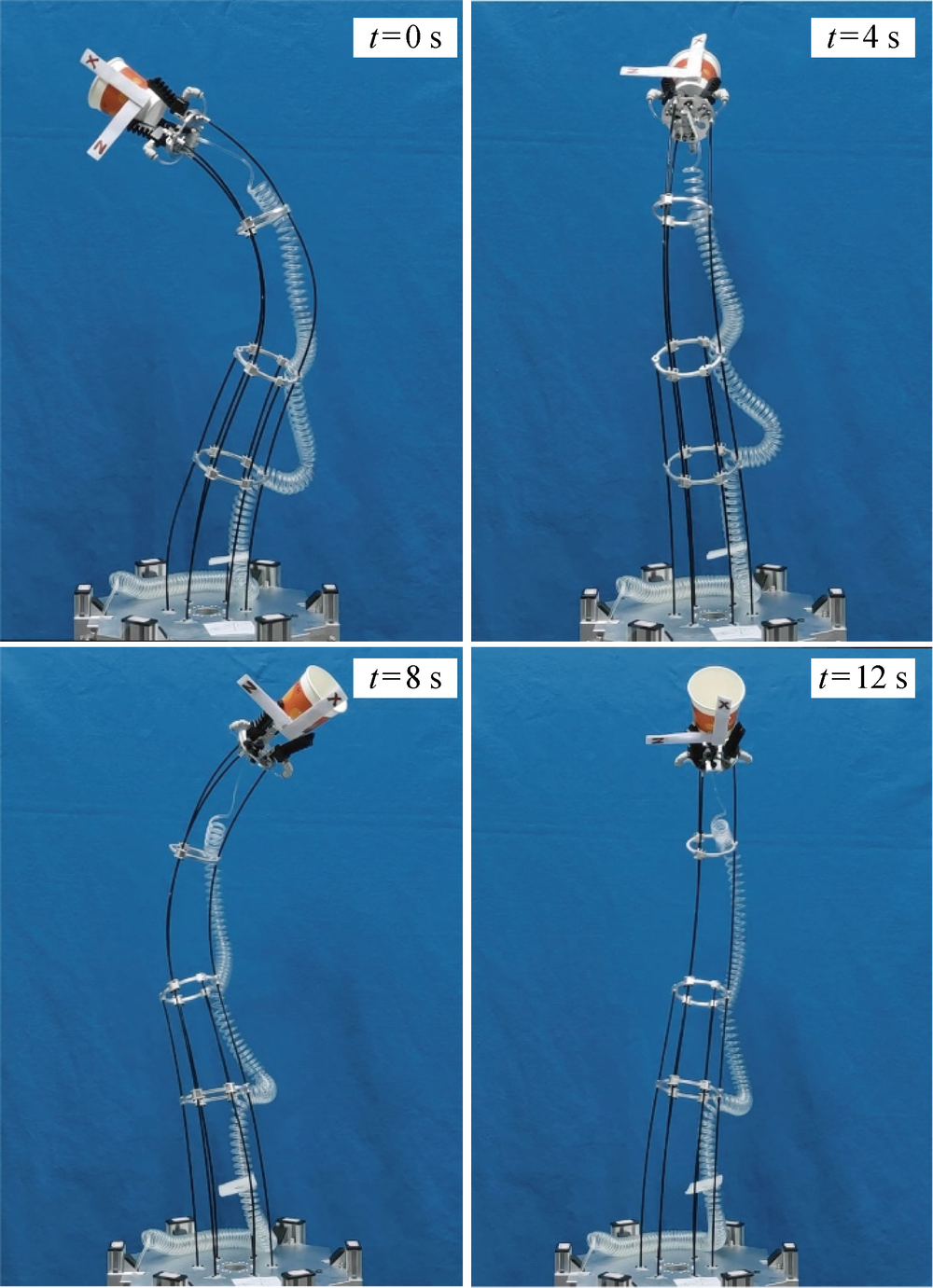
Fig.9
Planar error experiment measured by marker fixed on end-effector
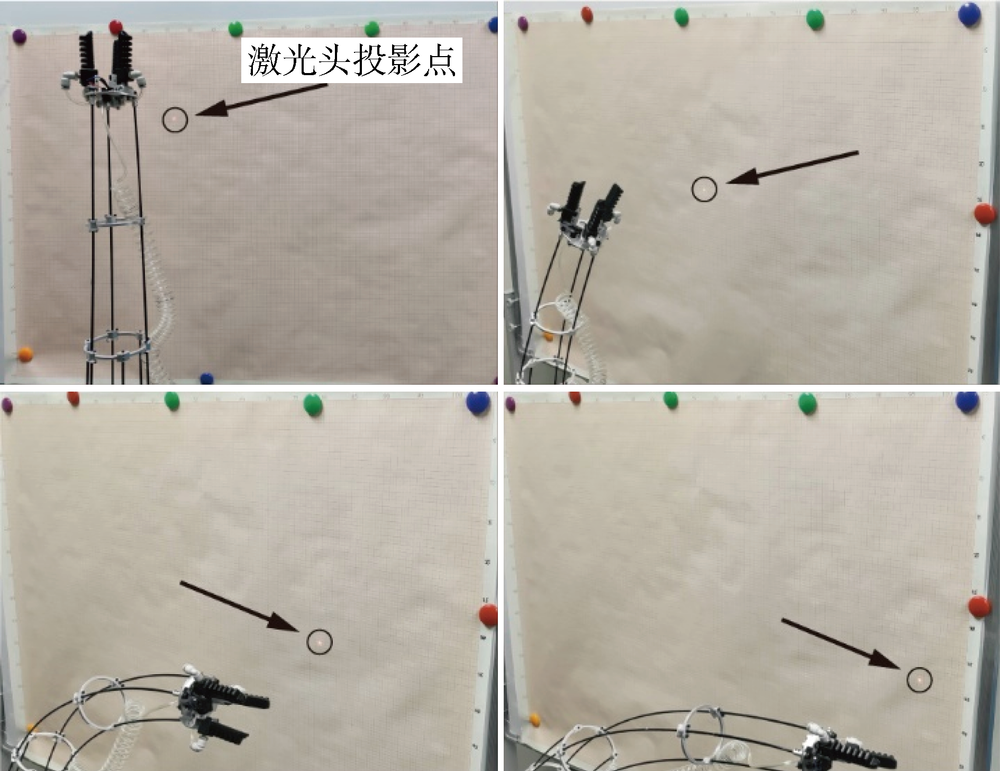
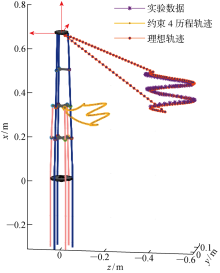
Fig.10
Open-loop tracking experiment
Tab.5
Comparison of desired points and measuring points
| 目标点 x/mm | 目标点 z/mm | 坐标版 x/mm | 坐标版 z/mm | 距离 D/mm |
|---|---|---|---|---|
| 486.2 | -406.5 | 480.5 | -406.6 | 5.7 |
| 449.2 | -582.9 | 447.5 | -585.6 | 3.2 |
| 375.4 | -590.0 | 378.9 | -600.2 | 10.8 |
| 414.5 | -390.5 | 422.8 | -387.3 | 8.9 |
| 336.2 | -390.1 | 342.5 | -402.6 | 14.0 |
| [1] |
徐凯, 刘欢. 多杆连续体机构: 构型与应用[J]. 机械工程学报, 2018, 54(13): 25-33.
doi: 10.3901/JME.2018.13.025 |
|
XU Kai, LIU Huan. Multi-backbone continuum mechanisms: Forms and applications[J]. Journal of Mechanical Engineering, 2018, 54(13): 25-33.
doi: 10.3901/JME.2018.13.025 |
|
| [2] | 赵亮, 赵智远, 朱德勇, 等. 用于微创外科的线驱动连续型手术机器人设计与仿真研究[J]. 机电工程, 2020, 37(4): 451-455. |
| ZHAO Liang, ZHAO Zhiyuan, ZHU Deyong, et al. Design and simulation of line-driven continuum surgical robot for minimally invasive surgery[J]. Journal of Mechanical & Electrical Engineering, 2020, 37(4): 451-455. | |
| [3] |
CHEN Y Y, ZHANG S A, WU Z H, et al. Review of surgical robotic systems for keyhole and endoscopic procedures: State of the art and perspectives[J]. Frontiers of Medicine, 2020, 14(4): 382-403.
doi: 10.1007/s11684-020-0781-x URL |
| [4] |
LIU S T, YANG Z X, ZHU Z J, et al. Development of a dexterous continuum manipulator for exploration and inspection in confined spaces[J]. Industrial Robot: An International Journal, 2016, 43(3): 284-295.
doi: 10.1108/IR-07-2015-0142 URL |
| [5] |
周圆圆, 李建华, 郭明全, 等. 连续体单孔手术机器人的建模与优化分析[J]. 机器人, 2020, 42(3): 316-324.
doi: 10.13973/j.cnki.robot.190371 |
|
ZHOU Yuanyuan, LI Jianhua, GUO Mingquan, et al. Modeling and optimization analysis of a continuum robot for single-port surgery[J]. Robot, 2020, 42(3): 316-324.
doi: 10.13973/j.cnki.robot.190371 |
|
| [6] |
XU K, ZHAO J R, FU M X. Development of the SJTU unfoldable robotic system (SURS) for single port laparoscopy[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(5): 2133-2145.
doi: 10.1109/TMECH.2014.2364625 URL |
| [7] | ZHAO B, ZENG L Y, WU B B, et al. A continuum manipulator with closed-form inverse kinematics and independently tunable stiffness[C]∥2020 IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020: 1847-1853. |
| [8] |
XU K, SIMAAN N. Intrinsic wrench estimation and its performance index for multisegment continuum robots[J]. IEEE Transactions on Robotics, 2010, 26(3): 555-561.
doi: 10.1109/TRO.2010.2046924 URL |
| [9] | TILL J, BRYSON C E, CHUNG S, et al. Efficient computation of multiple coupled Cosserat rod models for real-time simulation and control of parallel continuum manipulators[C]∥2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA: IEEE, 2015: 5067-5074. |
| [10] | 方跃法, 林华杰. 连续体并联抓取机器人的结构设计及运动学分析[J]. 北京交通大学学报, 2019, 43(4): 80-87. |
| FANG Yuefa, LIN Huajie. Structural design and kinematics analysis of the continuum parallel grasping manipulator[J]. Journal of Beijing Jiaotong University, 2019, 43(4): 80-87. | |
| [11] |
WU G L, SHI G L. Experimental statics calibration of a multi-constraint parallel continuum robot[J]. Mechanism and Machine Theory, 2019, 136: 72-85.
doi: 10.1016/j.mechmachtheory.2019.02.013 URL |
| [12] | WU G L, SHI G L, SHI Y L. Modeling and analysis of a parallel continuum robot using artificial neural network[C]∥2017 IEEE International Conference on Mechatronics. Churchill, VIC, Australia: IEEE, 2017: 153-158. |
| [13] | BRYSON C E, RUCKER D C. Toward parallel continuum manipulators[C]∥2014 IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014: 778-785. |
| [14] |
汪培义, 郭盛, 王向阳, 等. 基于柔性并联连续体的灵巧操作手的设计及分析[J]. 机械工程学报, 2020, 56(19): 122-131.
doi: 10.3901/JME.2020.19.122 |
|
WANG Peiyi, GUO Sheng, WANG Xiangyang, et al. Design and analysis of a dexterous gripper based on flexible parallel continuum manipulator[J]. Journal of Mechanical Engineering, 2020, 56(19): 122-131.
doi: 10.3901/JME.2020.19.122 |
|
| [15] |
TILL J, RUCKER D C. Elastic stability of cosserat rods and parallel continuum robots[J]. IEEE Transactions on Robotics, 2017, 33(3): 718-733.
doi: 10.1109/TRO.2017.2664879 URL |
| [1] | WU Yikai, ZHU Yechen, GONG Shengjie. Flow-Induced Vibration Response of a Flat Plate in a Confined Rectangular Channel [J]. Journal of Shanghai Jiao Tong University, 2026, 60(2): 331-337. |
| [2] | WAN Zhipeng, CUI Lin, JENG Dongsheng. A Semi-Dynamic Coupled Model of Seabed Oscillatory and Residual Response Under Wave-Current Interaction [J]. Journal of Shanghai Jiao Tong University, 2026, 60(1): 142-153. |
| [3] | HUANG JinFeng, ZHANG Qian. Cascade Sliding Mode Decoupling Control of Coupled Inductor Single-Input Dual-Output Buck Converter Based on Super-Twisting Extend State Observer [J]. Journal of Shanghai Jiao Tong University, 2025, 59(5): 592-604. |
| [4] | LIU Yi, ZHANG Kailin, SHAO Shuai, XIANG Hongxu. Investigation on Steady-State Thermal Performance of Gear Box Based on Thermal-Fluid-Solid Coupling [J]. Journal of Shanghai Jiao Tong University, 2025, 59(5): 666-674. |
| [5] | FEI Renxiang, XU Hailiang, GE Pingjuan, CHEN Xiangyu. Assessment and Extension Method for Stable Operation Domain of DFIG in Asymmetric Weak Grid [J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1510-1522. |
| [6] | LI Yibo, ZHOU Qian, ZHU Dandan, JIANG Yafeng, WU Qiuwei, CHEN Jian. Control Strategy for Improving Active Frequency Support Capability of Offshore Wind Farm [J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1442-1450. |
| [7] | LI Yuyao, ZHAO Guocheng, XIAO Longfei. Numerical Study on Collection and Environmental Disturbance Characteristics of Different Nodule Collecting Models [J]. Journal of Shanghai Jiao Tong University, 2024, 58(7): 1036-1046. |
| [8] | JIANG Biao, LIU Jia, ZENG Pingliang, TANG Zao, LI Yalou. Two-Stage Robust Planning for Transmission Network Considering Adaptive Decision of Carbon Trading Volume [J]. Journal of Shanghai Jiao Tong University, 2024, 58(6): 826-835. |
| [9] | HU Yafei(胡亚飞), LI Keqing(李克庆), HAN Bin (韩斌), JI Kun(吉坤). Strength Optimization and Prediction of Cemented Tailings Backfill Under Multi-Factor Coupling [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(5): 845-856. |
| [10] | TANG Qianyu. Experimental Study on Platform Vortex Induced Motion Considering Wave Current Coupling Effect [J]. Ocean Engineering Equipment and Technology, 2024, 11(4): 75-84. |
| [11] | ZHANG Ningbo1, AN Chen1, ZHAO Tianfeng1, GAO Songlin1, NI Haocheng1, ZHOU Zhenyu2. Multibody Coupled Dynamics Analysis of the Dual Vessel Float-over Method for Wind Turbine Installation System [J]. Ocean Engineering Equipment and Technology, 2024, 11(4): 58-66. |
| [12] | Ruikun Cao, Kexuan Sun, Chang Liu, Yuhong Mao, Wei Guo, Ping Ouyang, Yuanyuan Meng, Ruijia Tian, Lisha Xie, Xujie Lü4, Ziyi Ge. Structurally Flexible 2D Spacer for Suppressing the Electron-Phonon Coupling Induced Non-Radiative Decay in Perovskite Solar Cells [J]. Nano-Micro Letters, 2024, 16(1): 178-. |
| [13] | XIN Shangzhe, WANG Lei, FAN Jinyu, ZHOU Dongrong, CHEN Shihai, ZHU Xiaodong. Dynamic Characteristics Analysis and Mooring System Optimization of Wreck Salvage in Off-Bottom Stage Based on Seabed Resistance Force Time History [J]. Journal of Shanghai Jiao Tong University, 2023, 57(S1): 1-12. |
| [14] | PAN Jie, WANG Lei, WANG Yiting, ZHOU Dongrong, ZHU Xiaodong. Safety Analysis of Wreck Salvage Process Based on Skempton Function [J]. Journal of Shanghai Jiao Tong University, 2023, 57(S1): 94-107. |
| [15] | ZHU Xiaodong, ZHOU Dongrong, GAO Dingquan. Numerical Simulation of Coupled Dynamic Response of Integral Salvage of Large Tonnage Wreck [J]. Journal of Shanghai Jiao Tong University, 2023, 57(S1): 203-212. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||