Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (8): 1018-1026.doi: 10.16183/j.cnki.jsjtu.2020.207
Special Issue: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
Previous Articles Next Articles
TENG Yajuna, CHEN Wujuna( ), YANG Tianyanga, JING Zhongliangb, LIU Wujib
), YANG Tianyanga, JING Zhongliangb, LIU Wujib
Received:2020-07-08
Online:2021-08-28
Published:2021-08-31
Contact:
CHEN Wujun
E-mail:cwj@sjtu.edu.cn
CLC Number:
TENG Yajun, CHEN Wujun, YANG Tianyang, JING Zhongliang, LIU Wuji. Dynamics Analysis of Flexible Manipulator Driven by SMA Spring[J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 1018-1026.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.207
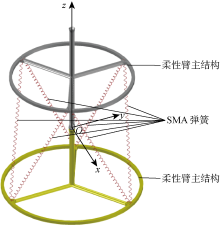
Fig.1
Flexible manipulator unit
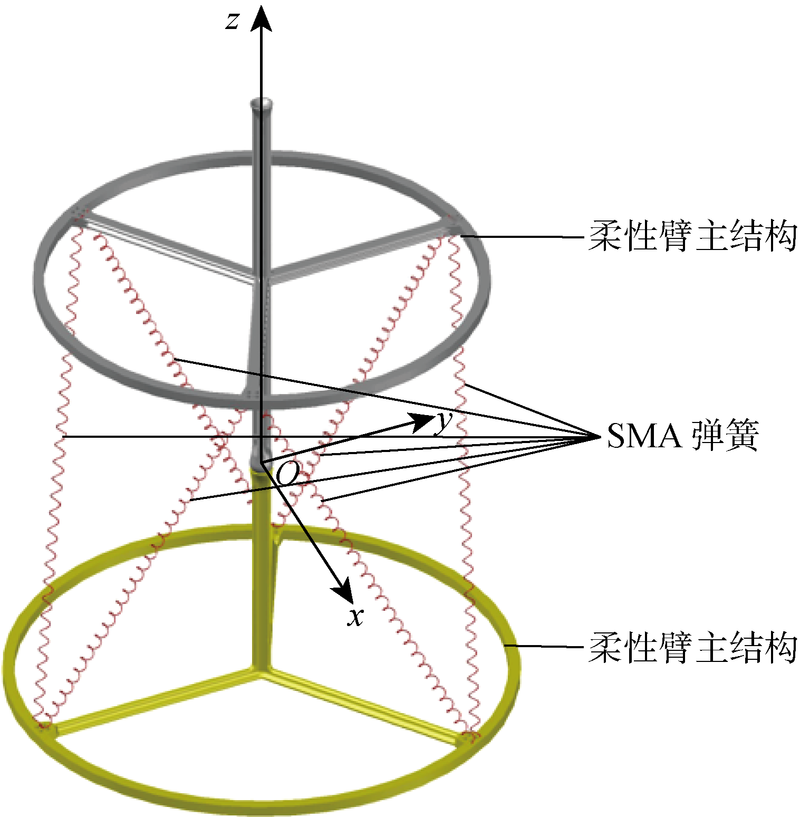
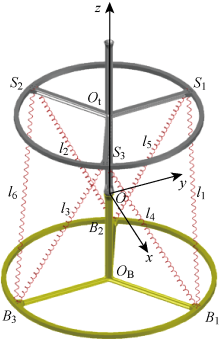
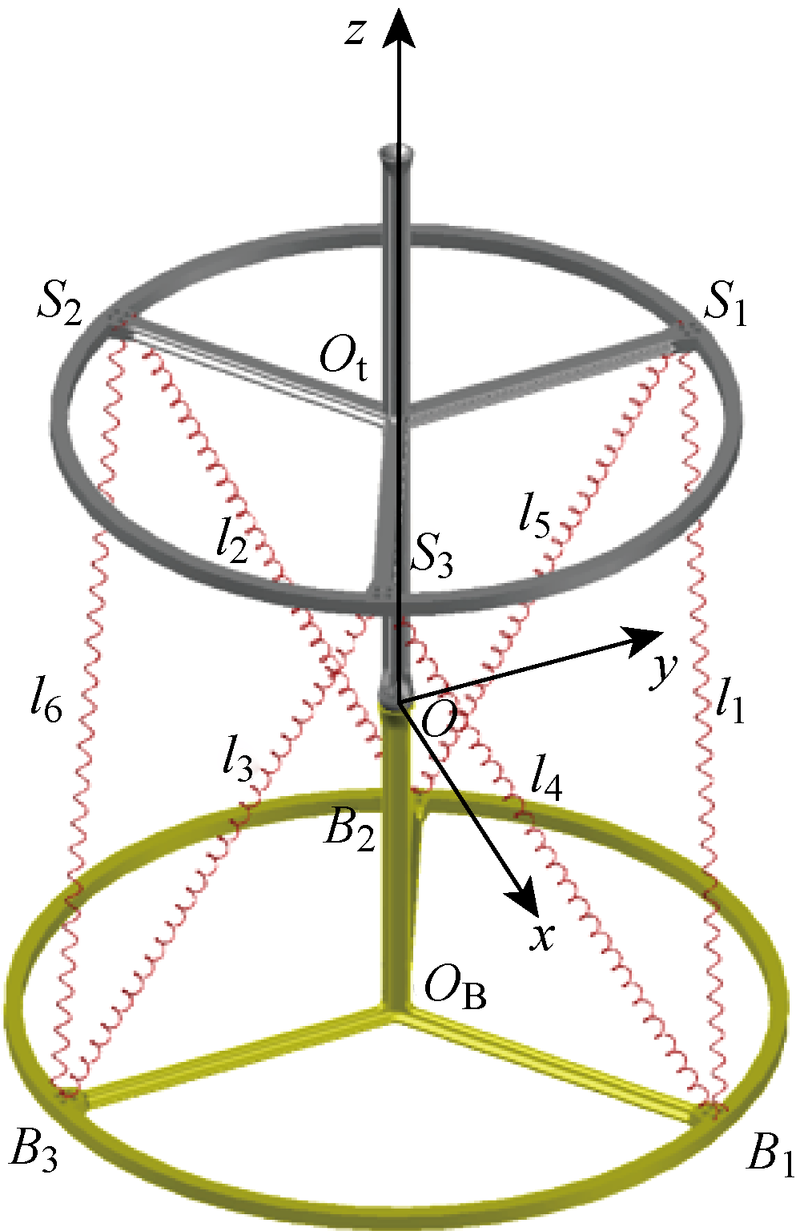
Fig.2
Coordinate system of flexible manipulator
Tab.1
Modeling parameters
| 参数 | 取值 |
|---|---|
| rB/mm | 172 |
| rt/mm | 157 |
| θ1、θ2、θ3/(°) | 45 |
| θB/(°) | 133 |
| xc/mm | 0 |
| yc/mm | 0 |
| zc/mm | 112 |
| φ1/(°) | 90 |
| φ2/(°) | 210 |
| φ3/(°) | 330 |
| mt/kg | 0.1 |
| Jx/(kg·m2) | 674.62 |
| Jy/(kg·m2) | 438.31 |
| Jz/(kg·m2) | 572.10 |
| d/mm | 0.51 |
| r/mm | 1.725 |
| n | 135 |
Tab.2
Material parameters of SMA spring
| 参数 | 取值 |
|---|---|
| EA/GPa | 21.6 |
| EM/GPa | 8.8 |
| ν | 0.33 |
| εL | 0.067 |
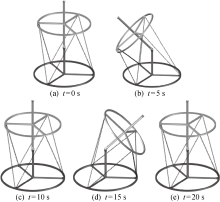
Fig.3
Kinematic forms of flexible manipulator at Ψ= π 4
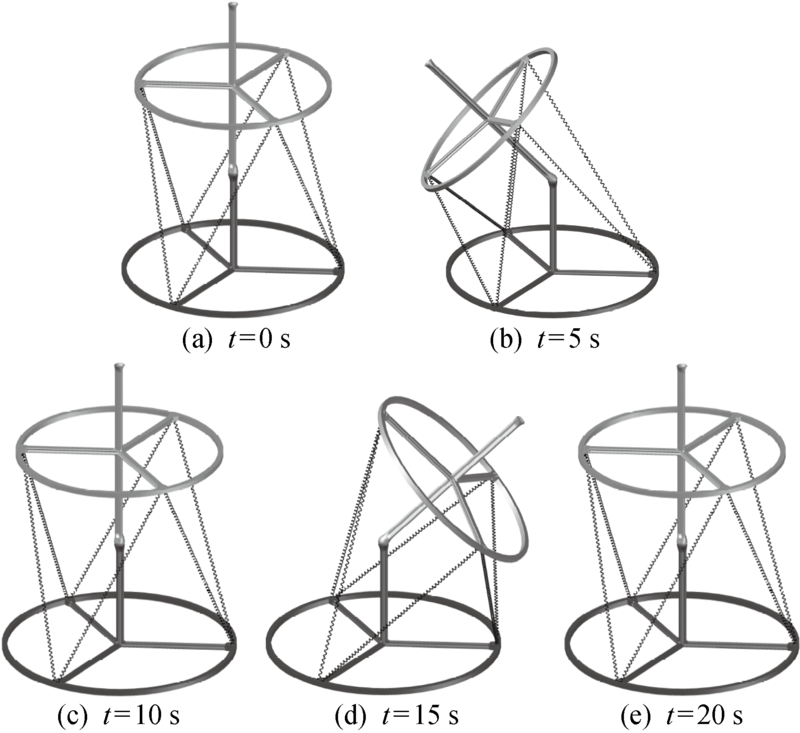
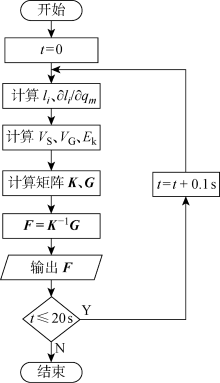
Fig.4
Flowchart of calculation
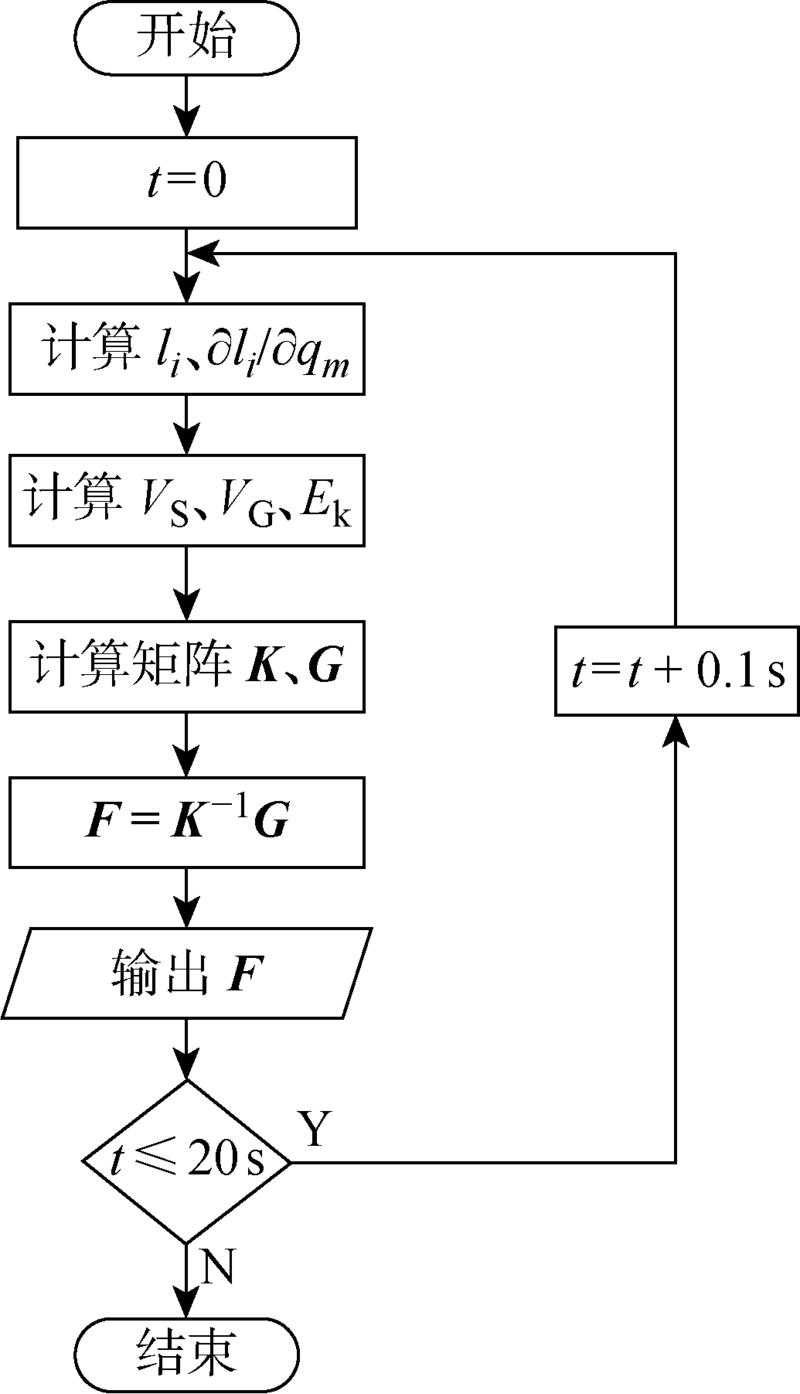
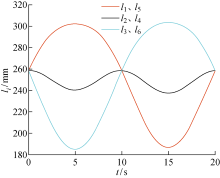
Fig.5
Lengths of SMA spring at Ψ=π/4
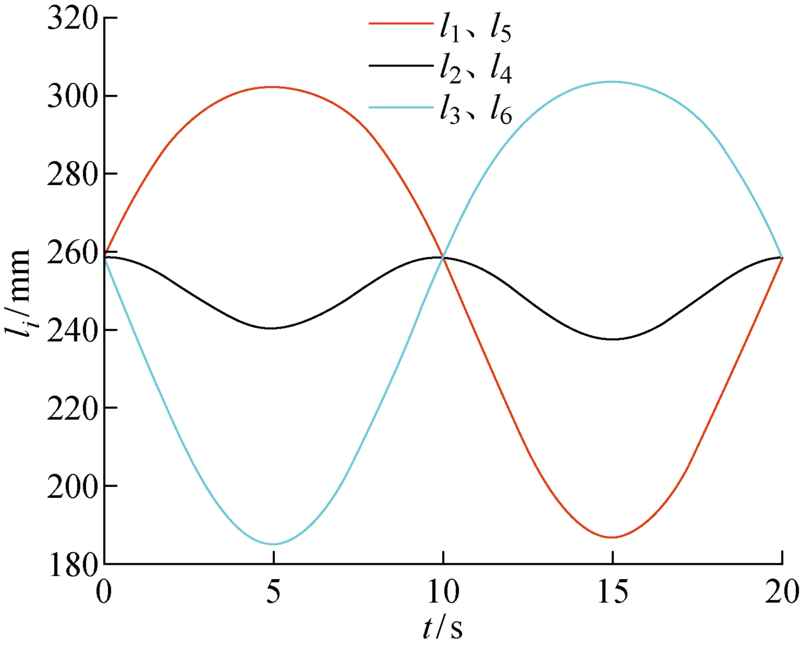

Fig.6
SMA spring forces at Ψ=π/4
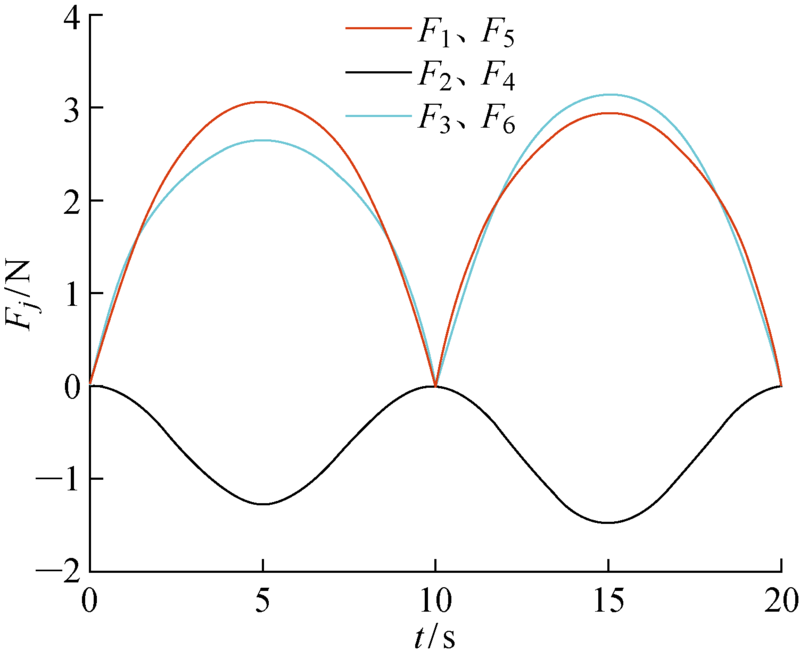
Fig.7
Martensite volumn fractions of l3 and l6 at Ψ=π/4
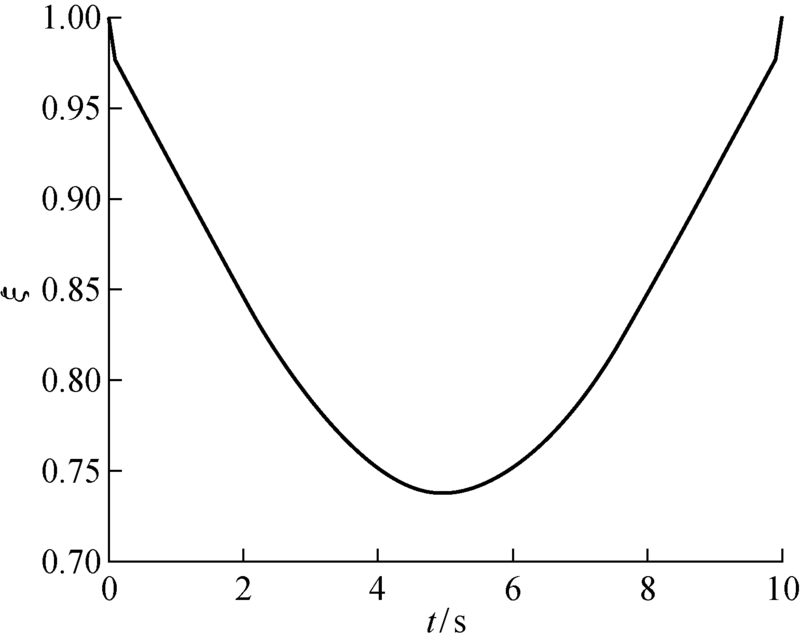
Fig.8
SMA spring forces at Ψ=π/4, π/6, and π/12
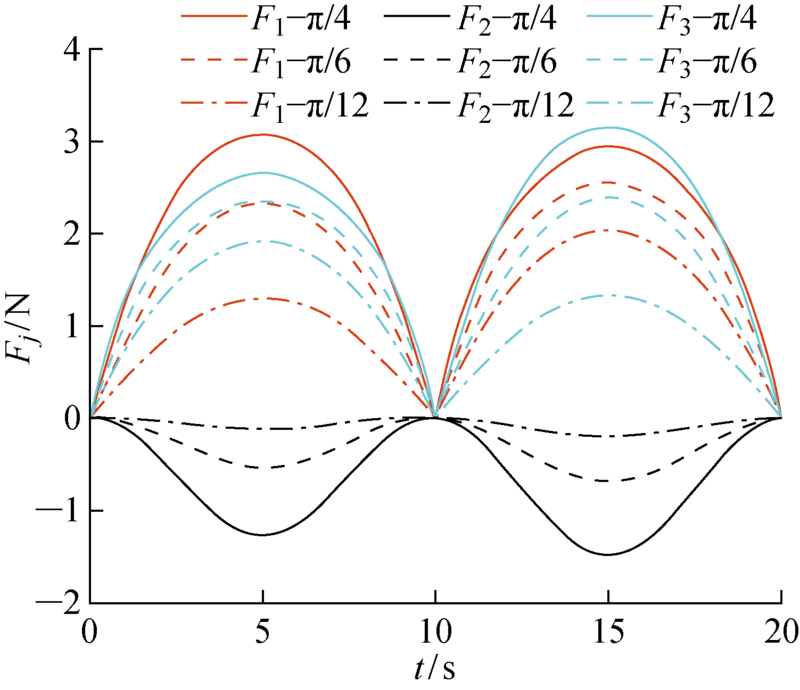
Tab.3
Maximum forces of SMA spring
| Ψ | Fmax/N | Fmin/N |
|---|---|---|
| π/4 | 3.1 | -1.5 |
| π/6 | 2.6 | -0.7 |
| π/12 | 2.0 | 0.2 |
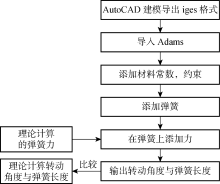
Fig.9
Flowchart of Adams simulation
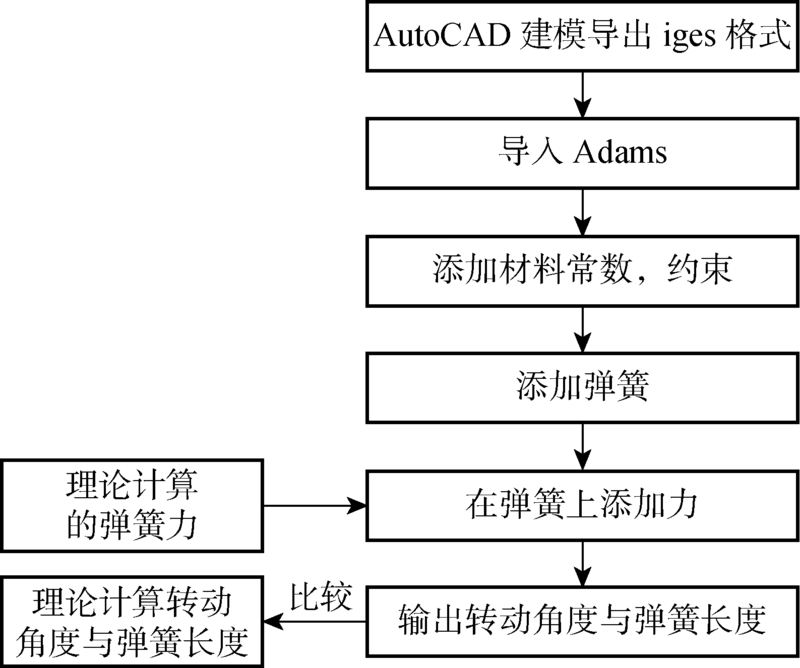
Fig.10
α versus t
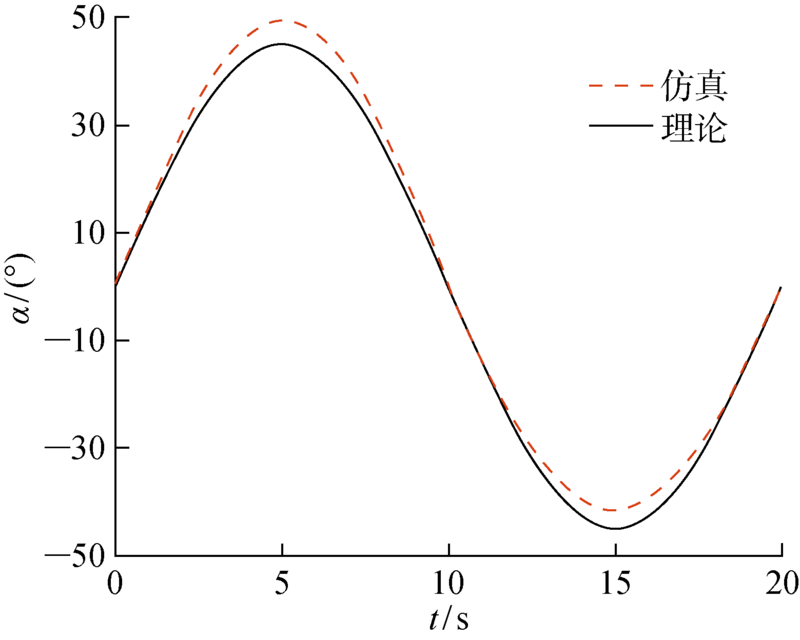
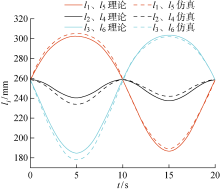
Fig.11
li versus t
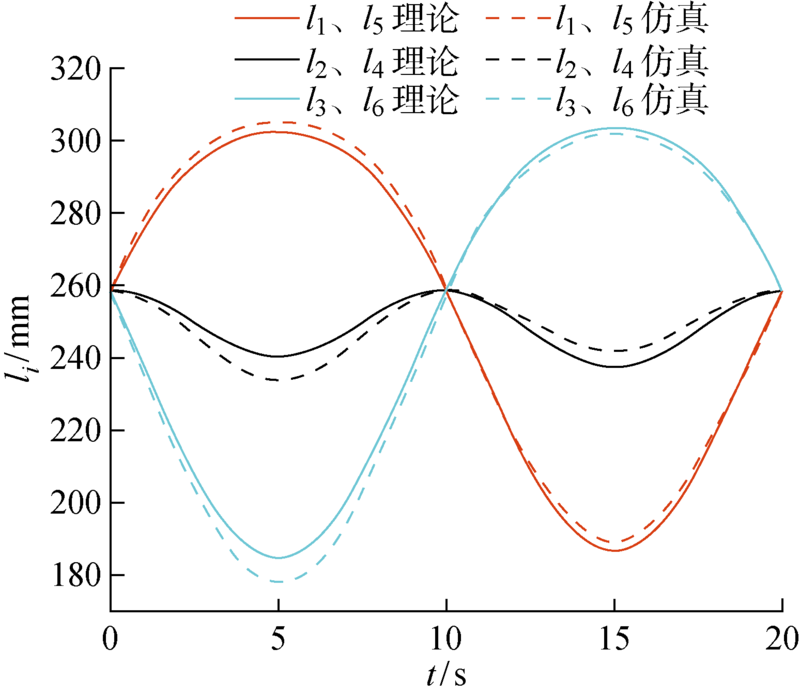
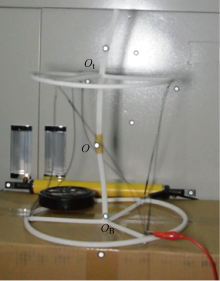
Fig.12
Prototype of flexible manipulator unit
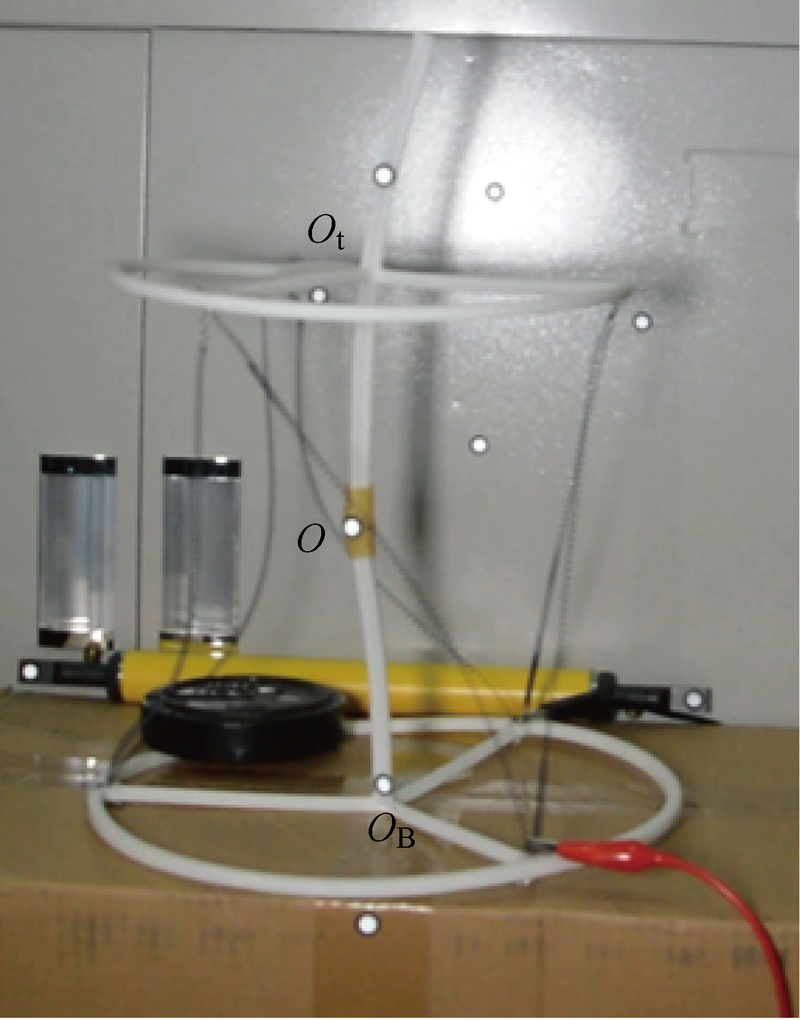
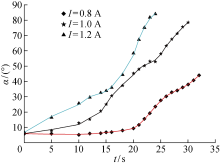
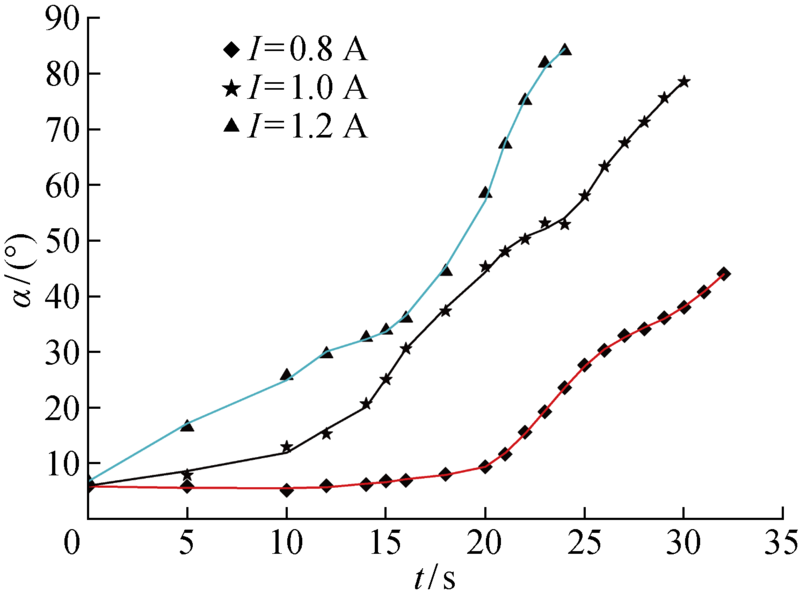
Fig.13
α versus t in the experiment
| [1] |
MOSADEGH B, POLYGERINOS P, KEPLINGER C, et al. Pneumatic networks for soft robotics that actuate rapidly[J]. Advanced Functional Materials, 2014, 24(15):2163-2170.
doi: 10.1002/adfm.v24.15 URL |
| [2] | MOHD JANI J, LEARY M, SUBIC A, et al. A review of shape memory alloy research, applications and opportunities[J]. Materials & Design (1980-2015), 2014, 56:1078-1113. |
| [3] | MAO S X, DONG E B, ZHANG S W, et al. A new soft bionic starfish robot with multi-gaits[C]//2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Wollongong, NSW, Australia: IEEE, 2013: 1312-1317. |
| [4] | MAO S X, DONG E B, XU M, et al. Design and development of starfish-like robot: Soft bionic platform with multi-motion using SMA actuators[C]//2013 IEEE International Conference on Robotics and Biomimetics. Shenzhen, China: IEEE, 2013: 91-96. |
| [5] | 毛世鑫. 辐射对称仿生柔体机器人协同推进机理及实现技术[D]. 合肥: 中国科学技术大学, 2014. |
| MAO Shixin. The cooperative propulsion mechanism and realization technology of actinomorphic bionic soft robot[D]. Hefei: University of Science and Technology of China, 2014. | |
| [6] | 冷劲松, 兰鑫, 刘彦菊, 等. 形状记忆聚合物复合材料及其在空间可展开结构中的应用[J]. 宇航学报, 2010, 31(4):950-956. |
| LENG Jinsong, LAN Xin, LIU Yanju, et al. Shape memory polymers composites and their applications in deployable structures[J]. Journal of Astronautics, 2010, 31(4):950-956. | |
| [7] | 金虎. 一种可模块化组装柔体机器人的柔性智能模块化结构[D]. 合肥: 中国科学技术大学, 2016. |
| JIN Hu. Soft and smart modular structure as tantacles for soft robots[D]. Hefei: University of Science and Technology of China, 2016. | |
| [8] |
MARTINEZ R V, GLAVAN A C, KEPLINGER C, et al. Soft actuators and robots that are resistant to mechanical damage[J]. Advanced Functional Materials, 2014, 24(20):3003-3010.
doi: 10.1002/adfm.v24.20 URL |
| [9] | MCMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the OctArm continuum manipulator[C]//2006 IEEE International Conference on Robotics and Automation. Orlando, FL, USA: IEEE, 2006: 2336-2341. |
| [10] | CHOI D G, YI B J, KIM W K. Design of a spring backbone micro endoscope[C]//2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA: IEEE, 2007: 1815-1821. |
| [11] | 胡海燕, 王鹏飞, 孙立宁, 等. 线驱动连续型机器人的运动学分析与仿真[J]. 机械工程学报, 2010, 46(19):1-8. |
| HU Haiyan, WANG Pengfei, SUN Lining, et al. Kinematic analysis and simulation for cable-driven continuum robot[J]. Journal of Mechanical Engineering, 2010, 46(19):1-8. | |
| [12] | SATO M, FUKAYA M, IWASAKI T. Serpentine locomotion with robotic snakes[J]. IEEE Control Systems Magazine, 2002, 22(1):64-81. |
| [13] | MA S, TADOKORO N, INOUE K, et al. Influence of inclining angle of a slope to optimal locomotion curves of a snake-like robot[C]//IEEE International Conference on Robotics, Intelligent Systems and Signal Processing. Changsha, China: IEEE, 2003, 1:353-358. |
| [14] |
REZAPOUR E, PETTERSEN K Y, LILJEBÄCK P, et al. Path following control of planar snake robots using virtual holonomic constraints: Theory and experiments[J]. Robotics and Biomimetics, 2014, 1(1):3.
doi: 10.1186/s40638-014-0003-6 URL |
| [15] |
PRAUTSCH P, MITA T, IWASAKI T. Analysis and control of a gait of snake robot[J]. IEEJ Transactions on Industry Applications, 2000, 120(3):372-381.
doi: 10.1541/ieejias.120.372 URL |
| [16] | 丁希仑, 张启先. 机器人柔性臂动力学建模的D-Holzer法[J]. 机械工程学报, 1999, 35(3):25. |
| DING Xilun, ZHANG Qixian. A new dynamic modeling method of D-Holzer of the flexible manipulator[J]. Chinese Journal of Mechanical Engineering, 1999, 35(3):25. | |
| [17] | 贾林睿, 张祎贝, 陈务军, 等. 八面体单元变几何桁架设计与分析[C]//第十七届全国现代结构工程学术研讨会. 天津: 天津大学, 2017: 485-492. |
| JIA Linrui, ZHANG Yibei, CHEN Wujun, et al. Design and analysis of octahedral variable geometry truss[C]//17th National Symposium on Modern Structural Engineering. Tianjin: Tianjin University, 2017: 485-492. | |
| [18] | TANAKA K. A thermomechanical sketch of shape memory effect: One-dimensional tensile behavior[J]. Res Mechanica, 1986, 18(3):251-263. |
| [19] |
LIANG C, ROGERS C A. A multi-dimensional constitutive model for shape memory alloys[J]. Journal of Engineering Mathematics, 1992, 26(3):429-443.
doi: 10.1007/BF00042744 URL |
| [20] |
LIANG C, ROGERS C A. One-dimensional thermomechanical constitutive relations for shape memory materials[J]. Journal of Intelligent Material Systems and Structures, 1990, 1(2):207-234.
doi: 10.1177/1045389X9000100205 URL |
| [21] |
BRINSON L C. One-dimensional constitutive behavior of shape memory alloys: Thermomechanical derivation with non-constant material functions and redefined martensite internal variable[J]. Journal of Intelligent Material Systems and Structures, 1993, 4(2):229-242.
doi: 10.1177/1045389X9300400213 URL |
| [22] | 李尚荣. NiTi记忆合金动态特性实验研究及其在仿生机器鱼上的应用[D]. 合肥: 中国科学技术大学, 2006. |
| LI Shangrong. Experiment research of dynamic property for nitonial memory alloy and its application of actuator for biomimetic robot fish[D]. Hefei: University of Science and Technology of China, 2006. |
| [1] | CHEN Zhenwei, LU Jialin, CHEN Xupeng. Effect of Tip Skew Coupled Rake on Hydrodynamic Performance of Kappel Propellers [J]. Journal of Shanghai Jiao Tong University, 2026, 60(3): 399-407. |
| [2] | TONG Zhen, GONG Zheng, WANG Dongze, WANG Xinyi, XIE Ziyang. Advancing the Frontier of Single-Port Surgery: The Rise of the SHURUI Single-Port Robotic Platform (Invited) [J]. Journal of Shanghai Jiao Tong University, 2026, 60(3): 355-363. |
| [3] | Zhao Bin, Dang Jianwu, Li Aijun. Unraveling Predictive Mechanism in Speech Perception and Production: Insights from EEG Analyses of Brain Network Dynamics [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 273-281. |
| [4] | Li Bin, Li Zonggang, Li Haoyu, Du Yajiang. Optimization of Three-Degree-of-Freedom Biomimetic Pectoral Fin Propulsion Law [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 195-208. |
| [5] | Zhang Han, Zhang Guoliang, Feng Shengjie, Li Qingyun, Qu Jieming, Xie Le. Development of Surgical Robot for CT-Guided Lung Biopsy [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 1-11. |
| [6] | ZHANG Baiyuan, ZHAO Guocheng, XIAO Longfei. Optimization of Geometrical Parameters of Coandă-Effect-Based Polymetallic Nodule Collection Device [J]. Journal of Shanghai Jiao Tong University, 2025, 59(8): 1059-1066. |
| [7] | WANG Jianlei, ZHANG Zhipu, KONG Xiaojun, ZHANG Shunjia, GONG Chunlin. A Comprehensive Review of Key Technologies for Deflectable-Nose Missiles [J]. Air & Space Defense, 2025, 8(6): 1-15. |
| [8] | LI Wenwei, CAO Shuai, QIAN Qian, ZHANG Yaling, CHEN Nan. Integrated Cam Contour Optimization Method Considering Kinematic and Dynamic Characteristics: A Paradigm of Offset Press Open-Close Gripper Mechanism [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1195-1207. |
| [9] | ZHAO Xiangtang, ZHAO Zhigang, WEI Qizhe, SU Cheng. Dynamic Analysis and Trajectory Solution of Multi-Robot Coordinated Towing System [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1134-1143. |
| [10] | CHEN Anran, JIA Dao, HE Wei. Numerical Simulation Research on the Characteristics and Influence Factors of High-Velocity Fragment Penetrating Panel [J]. Air & Space Defense, 2025, 8(6): 53-61. |
| [11] | LIU Yi, ZHANG Kailin, SHAO Shuai, XIANG Hongxu. Investigation on Steady-State Thermal Performance of Gear Box Based on Thermal-Fluid-Solid Coupling [J]. Journal of Shanghai Jiao Tong University, 2025, 59(5): 666-674. |
| [12] | Li Jianing, Zong Zhipeng, Zhou Tao, Zhang Jiang, Ma Haiteng. Hemodynamics in Portal Venous Based on 9.4T Magnetic Resonance Velocimetry and Numerical Simulations [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(4): 768-777. |
| [13] | Chen Huiran, Fu Rongchang, Yang Xiaozheng, Li Pengju, Wang Kun. Effect of Stride Length on Knee Contact [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(4): 759-767. |
| [14] | LI Xiaoyong, ZHANG Hang, JI Weidong, et al. Experimental Study on the Dynamic Response Characteristics of Buoys in Floating Wind Turbine Mooring Systems under Current Loads [J]. Ocean Engineering Equipment and Technology, 2025, 12(4): 49-54. |
| [15] | ZHENG Mao, DING Shigan, LAN Jiafen. Maneuvering Motion Modeling of Unconventional Ship Based on Numerical Calculation [J]. Journal of Shanghai Jiao Tong University, 2025, 59(12): 1824-1836. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||