Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (5): 575-585.doi: 10.16183/j.cnki.jsjtu.2019.277
Special Issue: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
Previous Articles Next Articles
LI Peng, RUAN Xiaogang, ZHU Xiaoqing( ), CHAI Jie, REN Dingqi, LIU Pengfei
), CHAI Jie, REN Dingqi, LIU Pengfei
Received:2019-09-26
Online:2021-05-28
Published:2021-06-01
Contact:
ZHU Xiaoqing
E-mail:alex.zhuxq@bjut.edu.cn
CLC Number:
LI Peng, RUAN Xiaogang, ZHU Xiaoqing, CHAI Jie, REN Dingqi, LIU Pengfei. A Regionalization Vision Navigation Method Based on Deep Reinforcement Learning[J]. Journal of Shanghai Jiao Tong University, 2021, 55(5): 575-585.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2019.277

Fig.1
DQN model
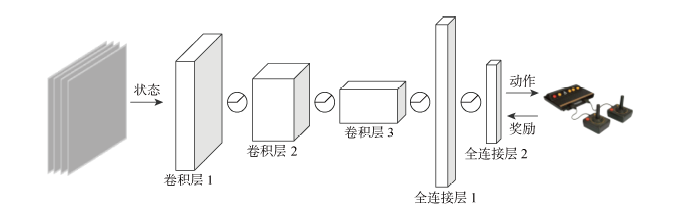

Fig.2
DRQN model
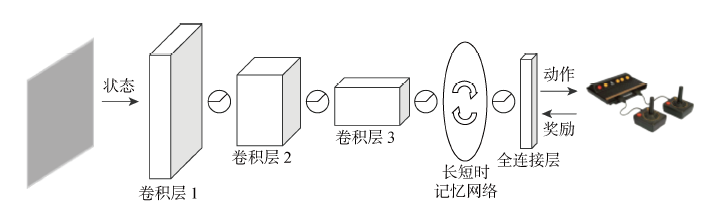
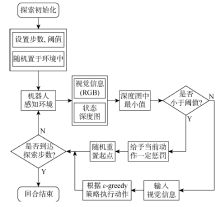
Fig.3
Exploration process
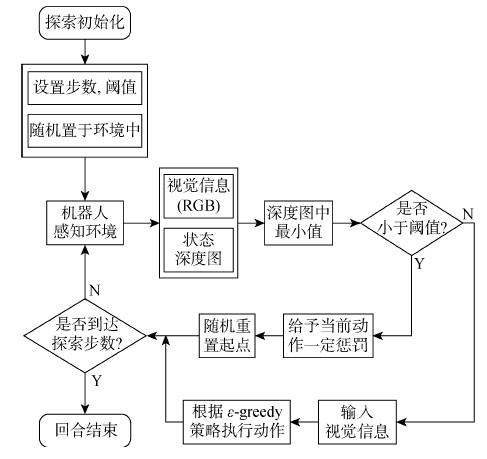
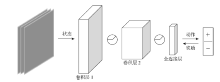
Fig.4
Reward prediction model
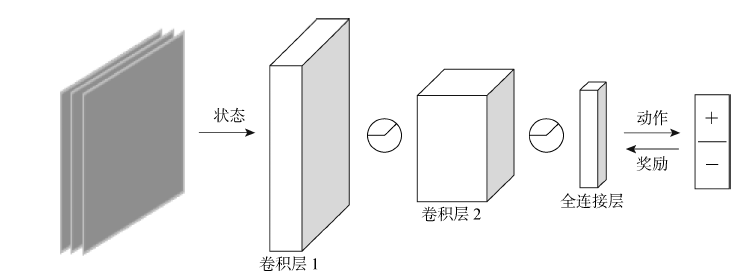
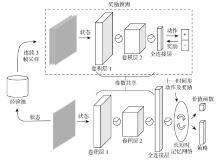
Fig.5
Submodule of region navigation
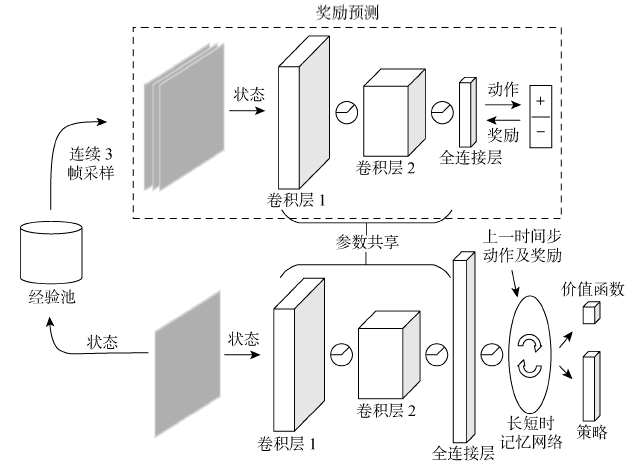
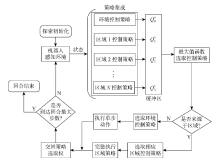
Fig.6
Multi-area navigation process
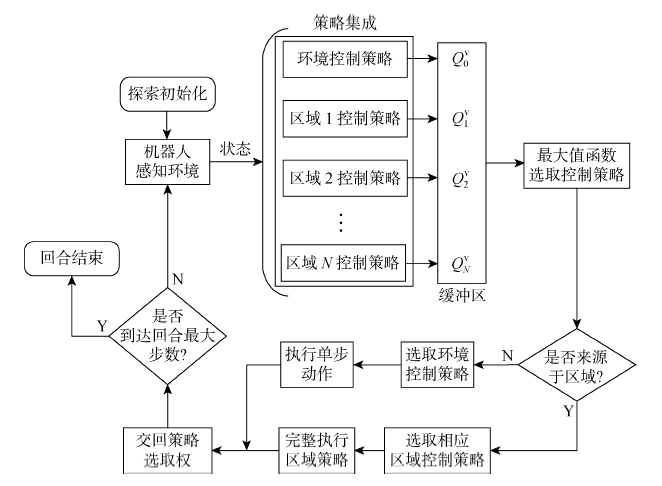
Fig.7
Running screens of simulation environment
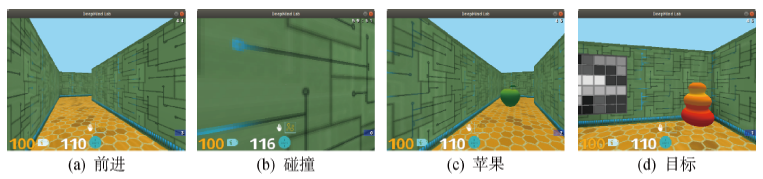
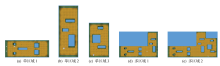
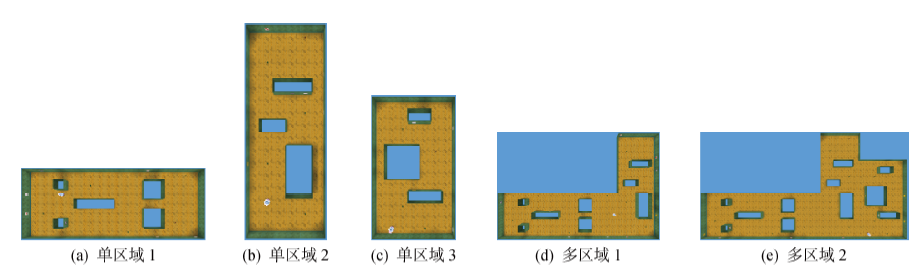
Fig.8
Test environment
Tab.1
Neural network parameters
| 网络部分 | 动作选取 | 奖励预测 |
|---|---|---|
| 卷积层1 | 16, 8, 4 | 16, 8, 4 |
| 卷积层2 | 32, 4, 2 | 32, 4, 2 |
| 全连接层 | 256 | 128 |
| LSTM | 256 | 无 |
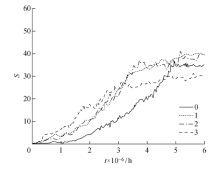
Fig.9
Experiment results of different thresholds
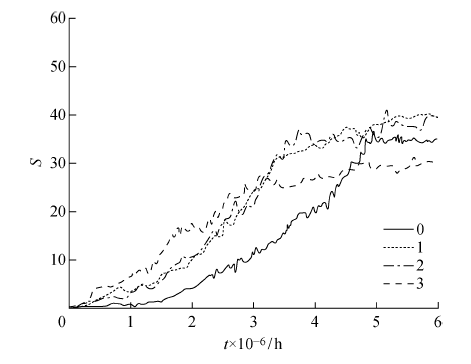

Fig.10
Experiment results of exploration method
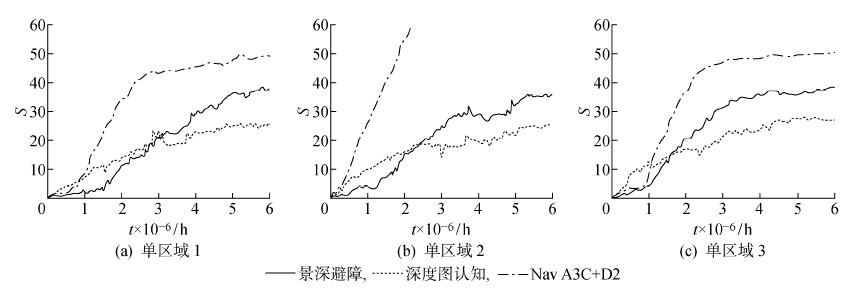

Fig.11
Experiment results of reward prediction

Fig.12
Value functions versus time
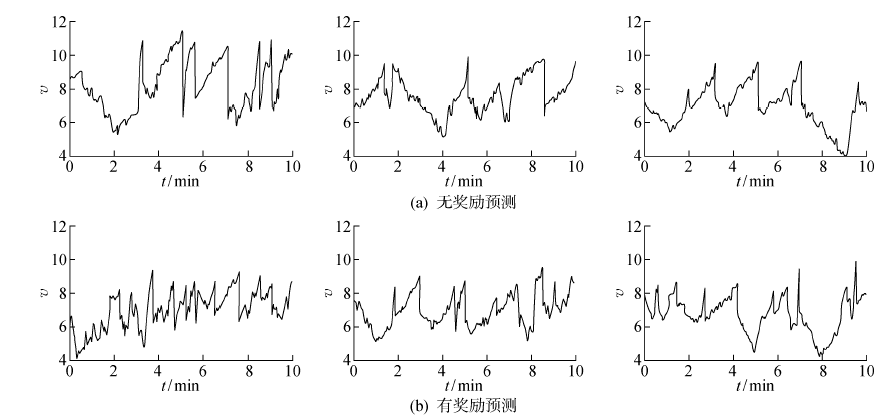
Fig.13
Experiment result of single-area navigation
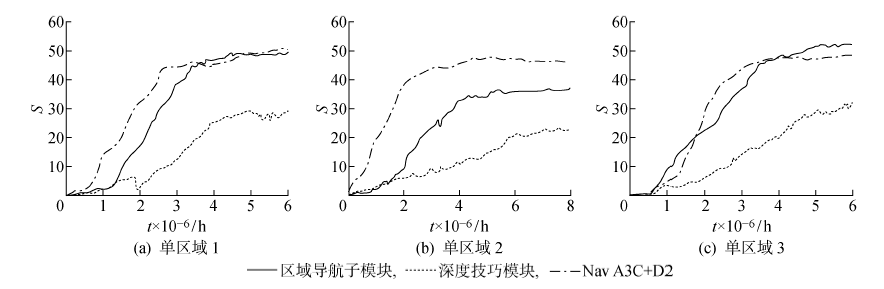
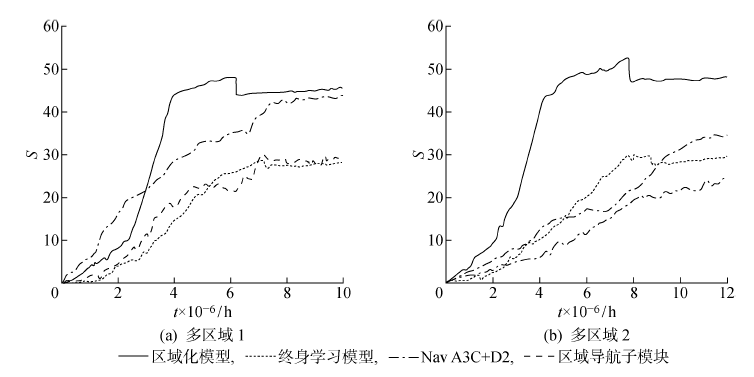
Fig.14
Experiment results of multi-area navigation
| [1] | 徐德. 室内移动式服务机器人的感知、定位与控制[M]. 北京: 科学出版社, 2008. |
| XU De. Perception, positioning and control of indoor mobile service robot[M]. Beijing: Science Press, 2008. | |
| [2] |
STEFFENACH H A, WITTER M, MOSER M B, et al. Spatial memory in the rat requires the dorsola-teral band of the entorhinal cortex[J]. Neuron, 2005, 45(2):301-313.
doi: 10.1016/j.neuron.2004.12.044 URL |
| [3] | ARULKUMARAN K, DEISENROTH M, BRUNDAGE M, et al. A brief survey of deep reinforcement learning, (2017-09-28)[2019-08-20]. https://arxiv.org/pdf/1708.05866.pdf |
| [4] | MIROWSKI P, PASCANU R, VIOLA F, et al. Learning to navigate in complex environments,(2017-01-13)[2019-08-13]. https://arxiv.org/pdf/1611.03673.pdf |
| [5] | ZHU Y, MOTTAGHI P, KOLVE E, et al. Target-driven visual navigation in indoor scenes using deep reinforcement learning [C]//IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017, 3357-3364. |
| [6] | JADERBERG M, MNIH V, CZARNECKI W M, et al. Reinforcement learning with unsupervised auxiliary tasks[EB/OL]. (2016-11-16)[2019-04-20]. https://arxiv.org/pdf/1611.05397.pdf |
| [7] | OH J, CHOCKALINGAM V, SATINDER P, et al. Control of memory, active perception, and action in minecraft[EB/OL]. (2016-05-30)[2019-05-07]. https://arxiv.org/pdf/1605.09128.pdf |
| [8] | 黄健, 严胜刚. 基于区域划分自适应粒子群优化的超短基线定位算法[J]. 控制与决策, 2019, 9(34):2023-2030. |
| HUANG Jian, YAN Shenggang. Ultra-short baseline positioning algorithm based on region-division adaptive particle swarm optimization[J]. Control and Decision, 2019, 9(34):2023-2030. | |
| [9] | 张俊, 田慧敏. 一种基于边指针搜索及区域划分的三角剖分算法[J]. 自动化学报, 2021, 47(1):100-107. |
| ZHANG Jun, TIAN Huimin. A triangulation algorithm based on edge-pointer search and region-division[J]. Acta Automatica Sinica, 2021, 47(1):100-107. | |
| [10] |
RUAN X G, REN D Q, ZHU X Q, et al. Optimized data association based on Gaussian mixture model[J]. IEEE Access, 2020, 8:2590-2598.
doi: 10.1109/Access.6287639 URL |
| [11] | 朱续涛, 何晓斌, 刘悦, 等. 一种简易的脑片图像的半自动区域划分及细胞计数方法[J]. 波谱学杂志, 2018, 2(35):133-140. |
| ZHU Xutao, HE Xiaobin, LIU Yue, et al. A Convenient semi-automatic method for analyzing brain sections: Registration, segmentation and cell counting[J]. Chinese Journal of Magnetic Resonance, 2018, 2(35):133-140. | |
| [12] | KULKARNI T D, SAEEDI A, GAUTAM S, et al. Deep successor reinforcement learning, (2016-06-08)[2019-05-21]. https://arxiv.org/pdf/1606.02396.pdf |
| [13] |
MNIH V, KAVUKCUOGLU K, SILVER D, et al. Human-level control through deep reinforcement learning[J]. Nature, 2015, 518(7540):529-533.
doi: 10.1038/nature14236 URL |
| [14] | SHIH H H, SHAO H C, PING T W, et al. Distributed deep reinforcement learning based indoor visual navigation [C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE, 2018: 2531-2537. |
| [15] | TESSLER C, GIVONY S, ZAHAVY T, et al. A deep hierarchical approach to lifelong learning in minecraft, (2016-11-30)[2019-06-05]. https://arxiv.org/pdf/1604.07255.pdf |
| [16] | HAUSKNECHT M, STONE P. Deep recurrent Q-learning for partially observable MDPs[EB/OL].(2017-01-11)[2019-05-17]. https://arxiv.org/pdf/1507.06527.pdf |
| [17] | RIEDMILLER M. Neural fitted Q iteration—First experiences with a data efficient neural reinforcement learning method [C]//16th European Conference on Machine Learning. Berlin, Germany: Springer-Verlag, 2005: 279-292. |
| [18] | LANGE S, RIEDMILLER M, VOIGTLANDER A. Autonomous reinforcement learning on raw visual input data in a real world application [C]//The 2012 International Joint Conference on Neural Networks. Brisbane, Australia: IEEE, 2012: 1-8. |
| [19] | GU S X, LILLICRAP T, SUTSKEVER I, et al. Continuous Deep Q-learning with model-based acceleration [C]//33rd International Conference on Machine Learning. USA: International Machine Learning Society, 2016: 4135-4148. |
| [20] |
KAELBLING L P, LITTMAN M L, CASSANDRA A R. Planning and acting in partially observable stochastic domains[J]. Artificial Intelligence, 1998, 101(1/2):99-134.
doi: 10.1016/S0004-3702(98)00023-X URL |
| [21] |
HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8):1735-1780.
doi: 10.1162/neco.1997.9.8.1735 URL |
| [22] | BEATTIE C, LEIBO J Z, TEPLYASHIN D, et al. Deepmind lab, (2016-12-13)[2018-12-30]. https://arxiv.org/pdf/1612.03801.pdf |
| [23] |
GERS F A, SCHMIDHUBER J, CUMMINS F. Learning to forget: Continual prediction with LSTM[J]. Neural Computation, 2000, 12(10):2451-2471.
doi: 10.1162/089976600300015015 URL |
| [24] | MNIH V, BADIA A P, MIRZA M, et al. Asynchronous method for deep reinforcement learning [C]//33rd International Conference on Machine Learning. USA: International Machine Learning Society, 2016: 2850-2869. |
| [25] | LEI T, MING L. Towards cognitive exploration through deep reinforcement learning for mobile robots [EB/OL]. (2016-10-06)[2019-06-12]. https://arxiv.org/pdf/1610.01733.pdf |
| [1] | Li Mingwang, Li Xinde, Zhang Zhentong, Wang Zeyu, Zhao Haoming. Haptic-Aided Navigation Vehicle: Enhancing Obstacle Detection in Blind Spots and Transparent Object Scenarios [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 167-175. |
| [2] | Xia Jie, Wu Xiaodong, Xu Min. BEV-Fused Imitation and Reinforcement Learning for Autonomous Driving Planning [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 154-166. |
| [3] | CHEN Shi, YANG Linsen, LIU Yihong, LUO Huan, ZANG Tianlei, ZHOU Buxiang. Optimal Scheduling Strategy of Newly-Built Microgrid in Small Sample Data-Driven Mode [J]. Journal of Shanghai Jiao Tong University, 2025, 59(6): 732-745. |
| [4] | WANG Zhibo, HU Weijun, MA Xianlong, QUAN Jiale, ZHOU Haoyu. Perception-Driven-Controlled UAV Interception and Collision Technology [J]. Air & Space Defense, 2025, 8(4): 78-84. |
| [5] | ZHOU Wenjie, FU Yulong, GUO Xiangke, QI Yutao, ZHANG Haibin. Air Combat Decision-Making Method Based on Game Tree and Digital Parallel Simulation Battlefield [J]. Air & Space Defense, 2025, 8(3): 50-58. |
| [6] | LIU Yanhang, QIAO Ruyu, LIANG Nan, CHEN Yu, YU Kai, WU Hanxiao. Renewable Energy Consumption Strategies of Power System Integrated with Electric Vehicle Clusters Based on Load Alignment and Deep Reinforcement Learning [J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1464-1475. |
| [7] | YANG Yinghe, WEI Handi, FAN Dixia, LI Ang. Optimization Method of Underwater Flapping Foil Propulsion Performance Based on Gaussian Process Regression and Deep Reinforcement Learning [J]. Journal of Shanghai Jiao Tong University, 2025, 59(1): 70-78. |
| [8] | ZHOU Yi, ZHOU Liangcai, SHI Di, ZHAO Xiaoying, SHAN Xin. Coordinated Active Power-Frequency Control Based on Safe Deep Reinforcement Learning [J]. Journal of Shanghai Jiao Tong University, 2024, 58(5): 682-692. |
| [9] | DONG Yubo1 (董玉博), CUI Tao1 (崔涛), ZHOU Yufan1 (周禹帆), SONG Xun2 (宋勋), ZHU Yue2 (祝月), DONG Peng1∗ (董鹏). Reward Function Design Method for Long Episode Pursuit Tasks Under Polar Coordinate in Multi-Agent Reinforcement Learning [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 646-655. |
| [10] | LI Shuyi (李舒逸), LI Minzhe (李旻哲), JING Zhongliang∗ (敬忠良). Multi-Agent Path Planning Method Based on Improved Deep Q-Network in Dynamic Environments [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 601-612. |
| [11] | MIAO Zhenhua(苗镇华), HUANG Wentao(黄文焘), ZHANG Yilian(张依恋), FAN Qinqin(范勤勤). Multi-Robot Task Allocation Using Multimodal Multi-Objective Evolutionary Algorithm Based on Deep Reinforcement Learning [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 377-387. |
| [12] | QUAN Jiale, MA Xianlong, SHEN Yuheng. Multi-agent Formation Method Based on Dynamic Optimization of Proximal Policies [J]. Air & Space Defense, 2024, 7(2): 52-62. |
| [13] | ZHANG Weizhen, HE Zhen, TANG Zhangfan. Reinforcement Learning Control Design for Perching Maneuver of Unmanned Aerial Vehicles with Wind Disturbances [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1753-1761. |
| [14] | MA Chi, ZHANG Guoqun, SUN Junge, LYU Guangzhe, ZHANG Tao. Deep Reinforcement Learning-Based Reconfiguration Method for Integrated Electronic Systems [J]. Air & Space Defense, 2024, 7(1): 63-70. |
| [15] | JI Xiukun (冀秀坤), HAI Jintao (海金涛), LUO Wenguang (罗文广), LIN Cuixia (林翠霞), XIONG Yu(熊 禹), OU Zengkai (殴增开), WEN Jiayan(文家燕). Obstacle Avoidance in Multi-Agent Formation Process Based on Deep Reinforcement Learning [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 680-685. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||