上海交通大学学报 ›› 2025, Vol. 59 ›› Issue (8): 1169-1180.doi: 10.16183/j.cnki.jsjtu.2023.646
严赫1, 朱星月1, 侯张俪1, 王卫军2, 张执南1( )
)
收稿日期:2023-12-26
修回日期:2024-02-17
接受日期:2024-03-07
出版日期:2025-08-28
发布日期:2025-08-26
通讯作者:
张执南
E-mail:zhinanz@sjtu.edu.cn
作者简介:严 赫(2000—),现为华为技术有限公司软件开发工程师,从事摩擦-动力学建模与分析研究.
基金资助:
YAN He1, ZHU Xingyue1, HOU Zhangli1, WANG Weijun2, ZHANG Zhinan1()
Received:2023-12-26
Revised:2024-02-17
Accepted:2024-03-07
Online:2025-08-28
Published:2025-08-26
Contact:
ZHANG Zhinan
E-mail:zhinanz@sjtu.edu.cn
摘要:
跳跃是月面探测机器人的一种可行的运动方式.由于缺乏与月壤特性的耦合研究,跳跃机器人在月面探测中尚未有成熟应用.针对月面探测器5 kPa的承载指标要求,开展机器人与月面的耦合研究,提出跳跃机器人新型储能腿构型,实现起跳时初速度大小与方向可变的低承载跳跃;优化储能元件参数,实现机器人的近恒力起跳,并在动力学仿真环境中完成验证.为实现机器人在月球表面的精确跳跃目标,建立考虑阻尼特性的月壤力学特性模型,基于离散元仿真环境测定了模型的关键力学参数,进而构建月壤表面机器人跳跃动力学模型,并通过离散元-动力学耦合仿真验证了模型的精确性.基于所建立的动力学模型,实现了两种运动规划算法,验证了模型的应用可能性.
中图分类号:
严赫, 朱星月, 侯张俪, 王卫军, 张执南. 小型月面跳跃机器人设计及运动建模[J]. 上海交通大学学报, 2025, 59(8): 1169-1180.
YAN He, ZHU Xingyue, HOU Zhangli, WANG Weijun, ZHANG Zhinan. Design and Motion Modeling of a Small-Scale Lunar Jumping Robot[J]. Journal of Shanghai Jiao Tong University, 2025, 59(8): 1169-1180.
图1
机器人总构型示意图
图2
跳跃腿结构示意图
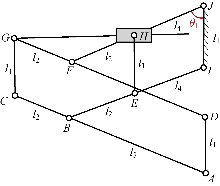
图3
直线跳跃腿机构简图
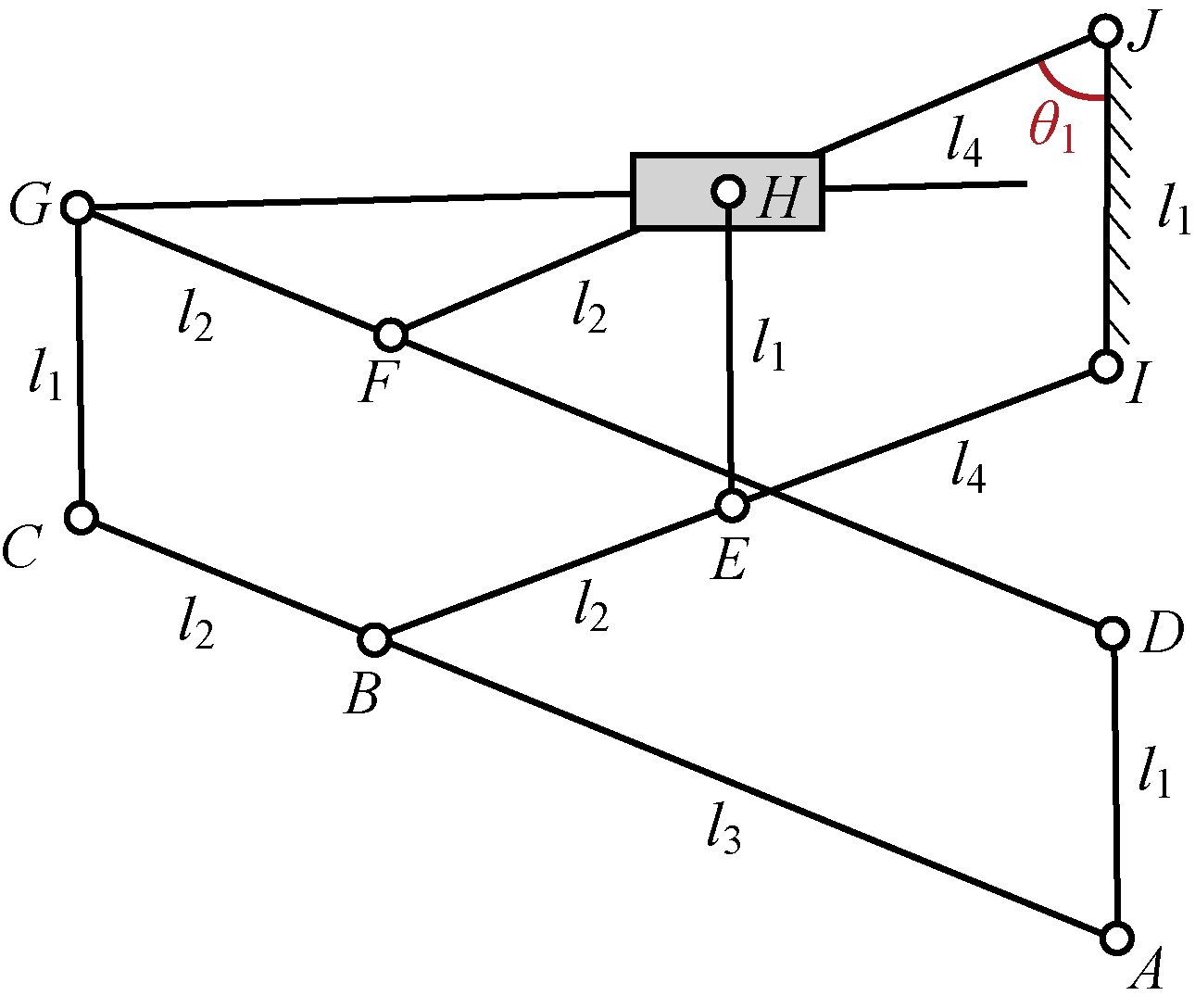
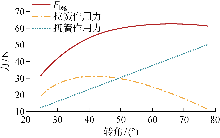
图4
Fleg与扭簧拉簧作用力的关系图
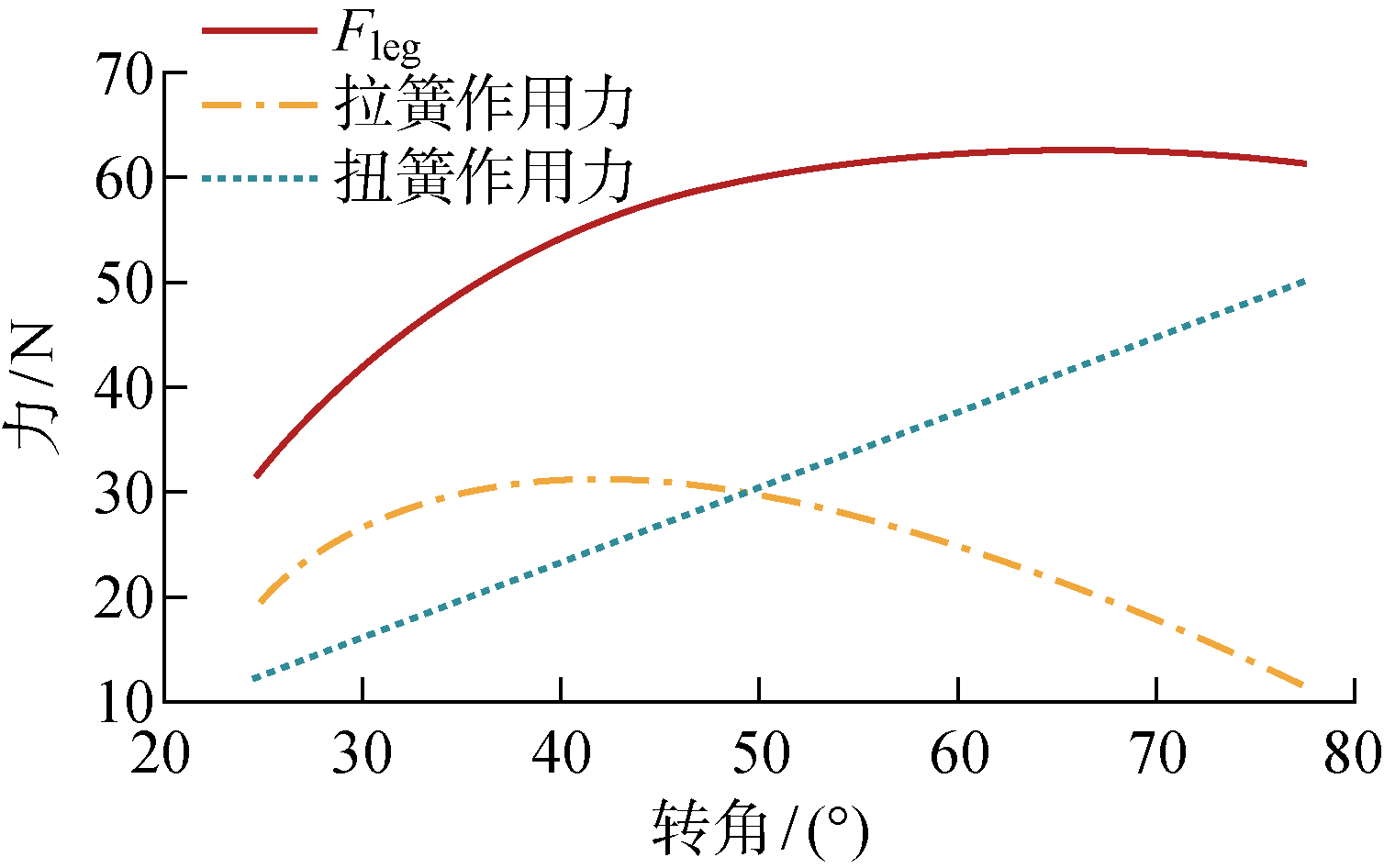
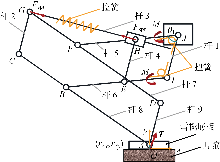
图5
月面起跳动力学模型示意图
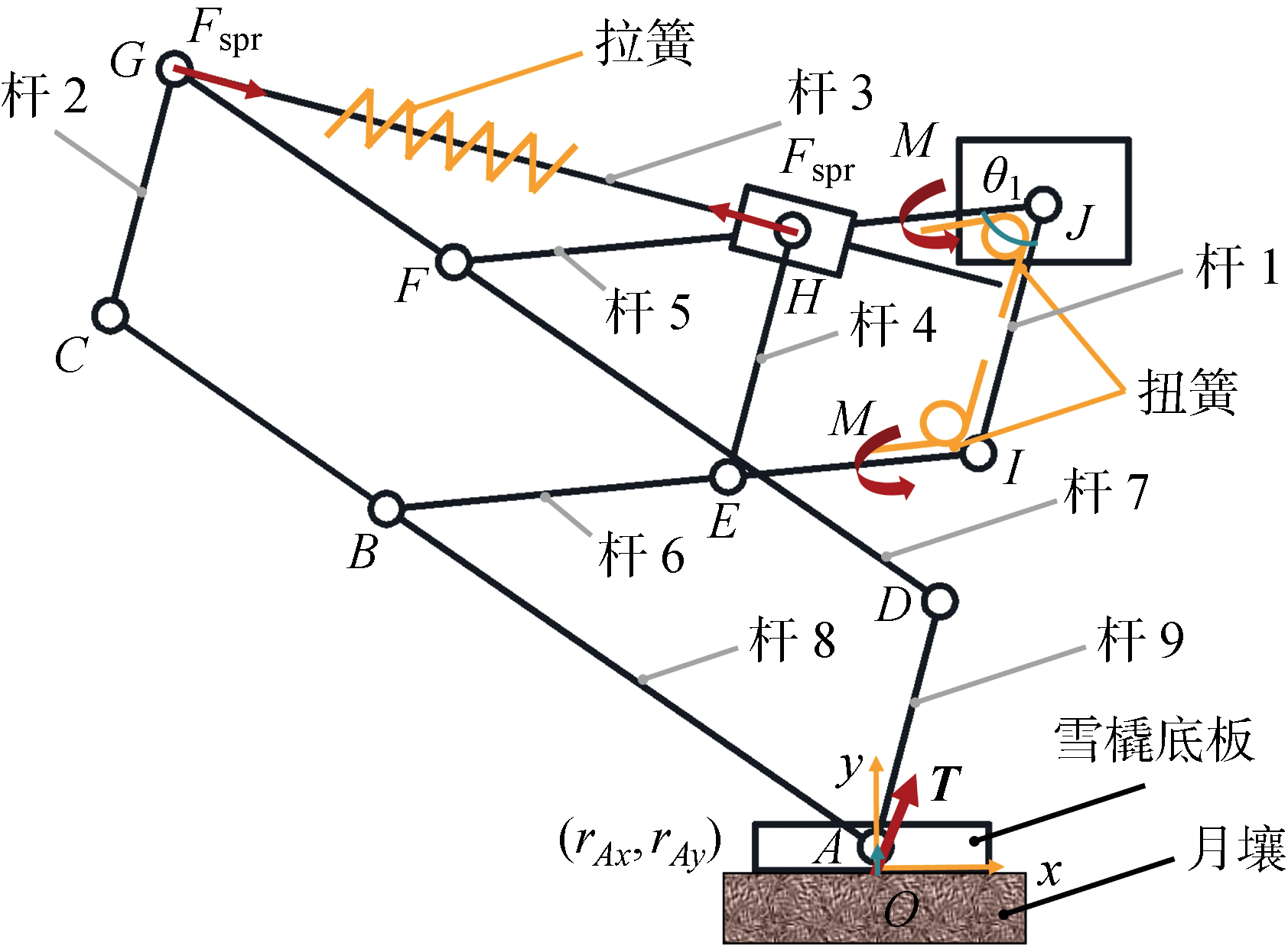
图6
离散元模型
表1
颗粒床与真实月壤剪切参数比较
| 材质 | k/mm | c/Pa | θ/(°) |
|---|---|---|---|
| 离散元颗粒床 | 2.912 | 189.4 | 26.89 |
| 真实月壤 | 无 | 260~1 800 | 25~40 |
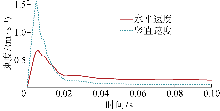
图7
触月底板起跳过程速度曲线
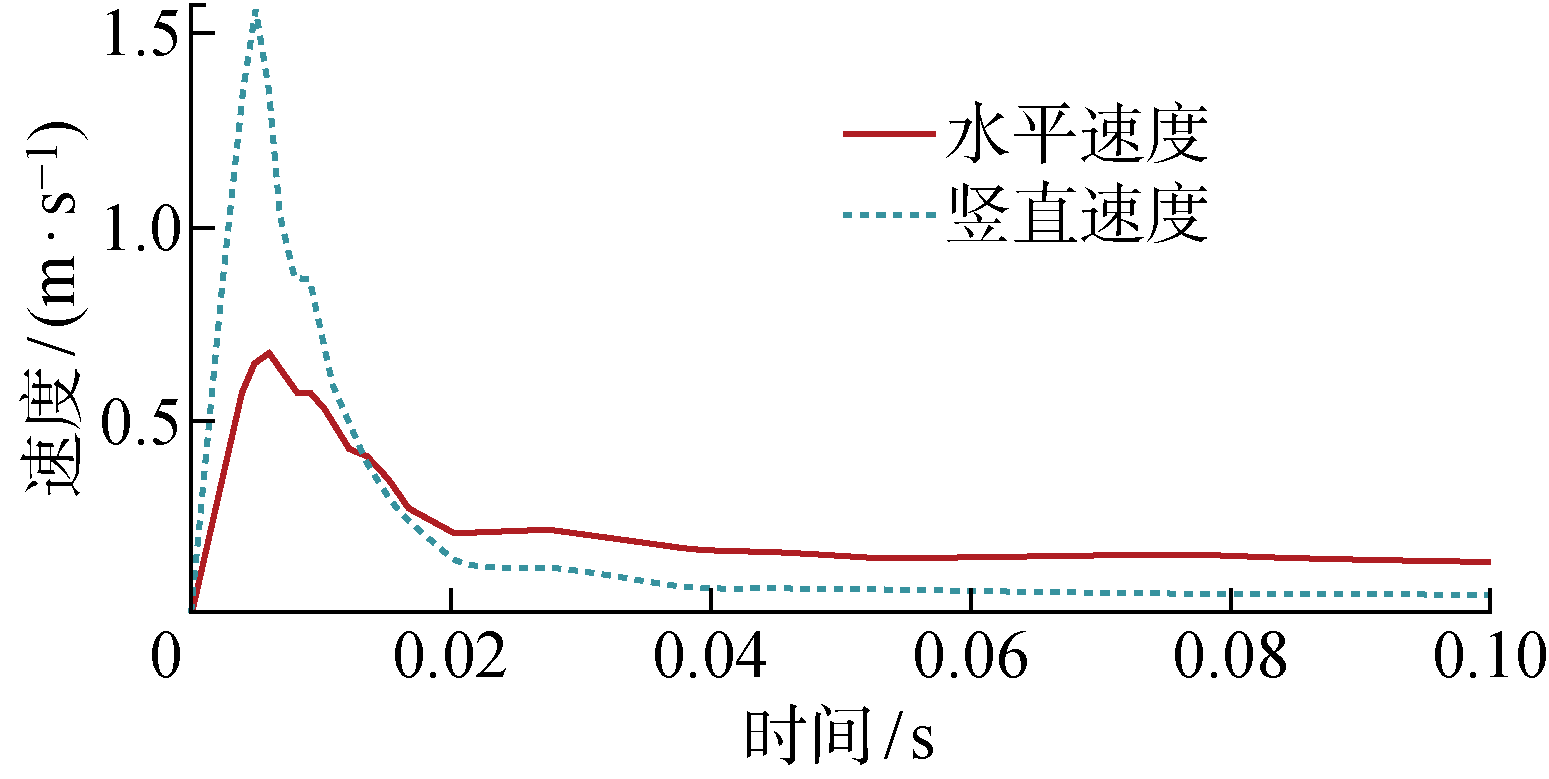
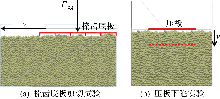
图8
离散元仿真实验示意图
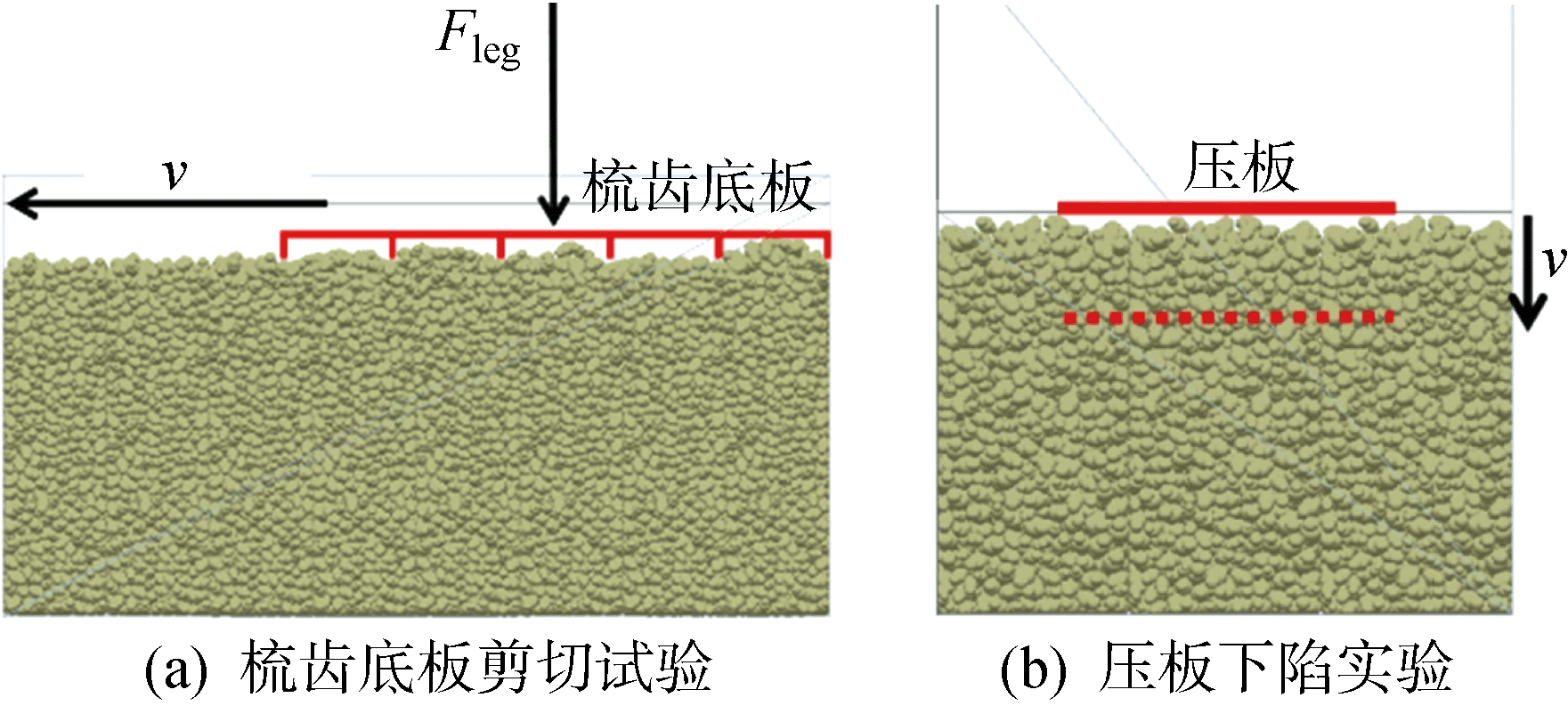
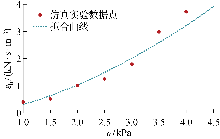
图9
剪切仿真实验拟合结果
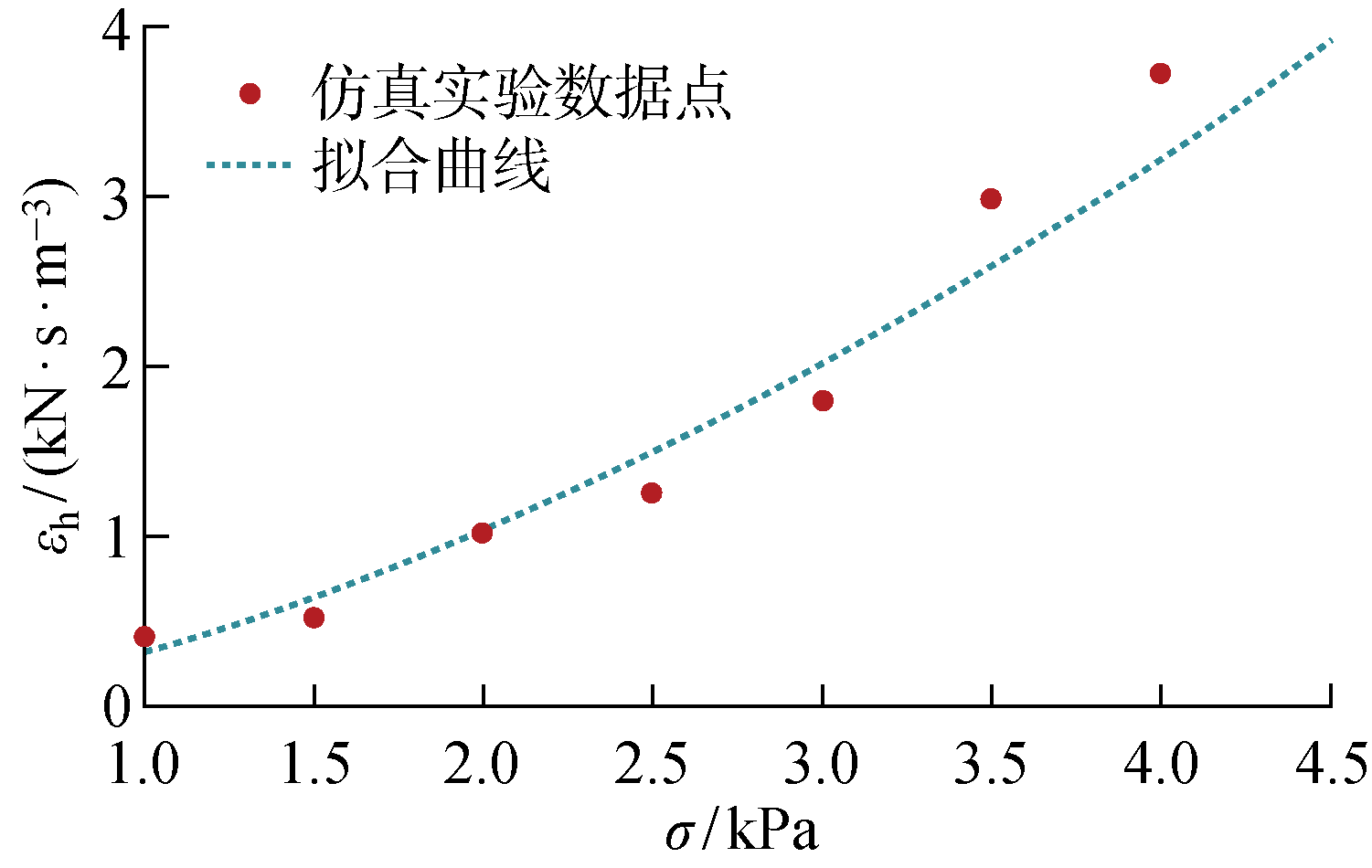
图10
承载仿真实验拟合结果
表2
离散元月壤力学特性参数汇总
| 参数 | 取值 |
|---|---|
| k/mm | 2.912 |
| c/Pa | 189.4 |
| θ/(°) | 26.89 |
| K/[MN·m-(2+n)] | 599.7 |
| n | 2.513 4 |
| Ah/[{N}^{1+mh}·s·{m}^{-(3+mh)}] | 4.615 2×10-3 |
| mh | 1.622 5 |
| Av/[GN·s·{m}^{-(3+mv)}] | 23.353 |
| mv | 2.648 9 |
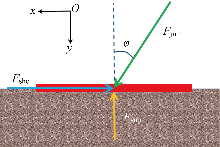
图11
底板-月壤接触模型
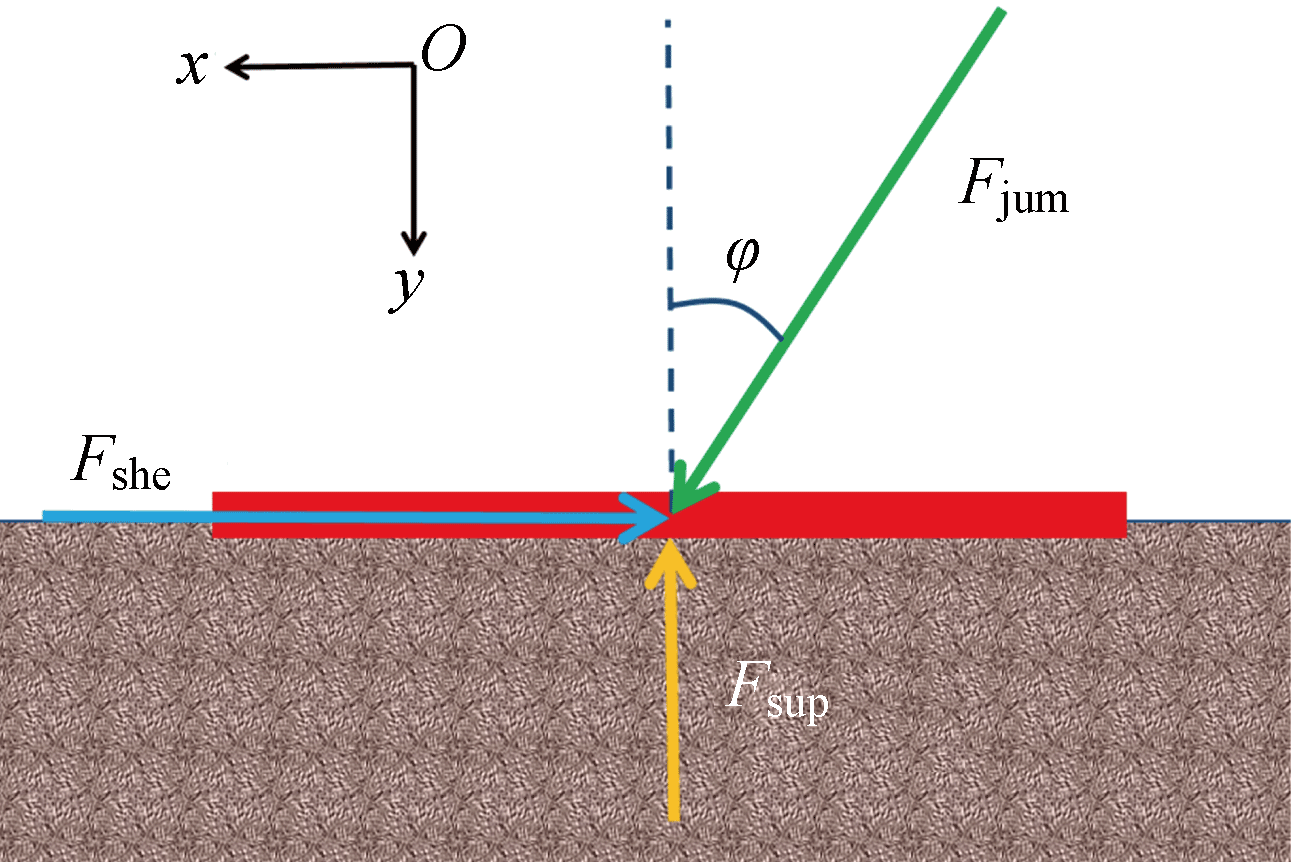
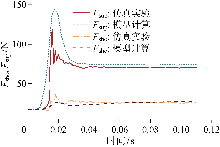
图12
模型计算结果与仿真比较
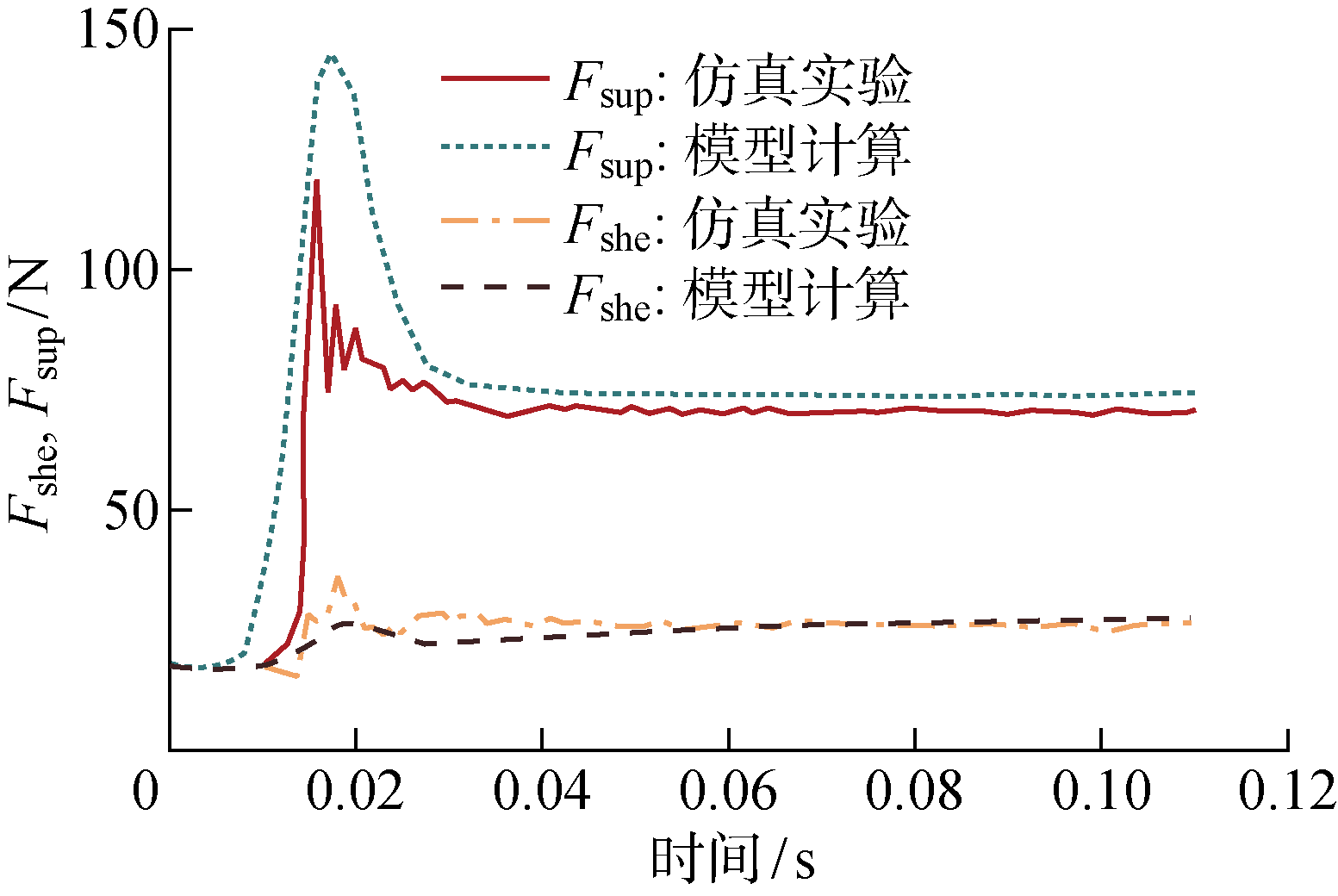
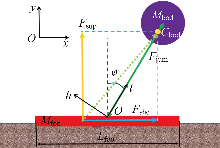
图13
抽象机器人的动力学模型
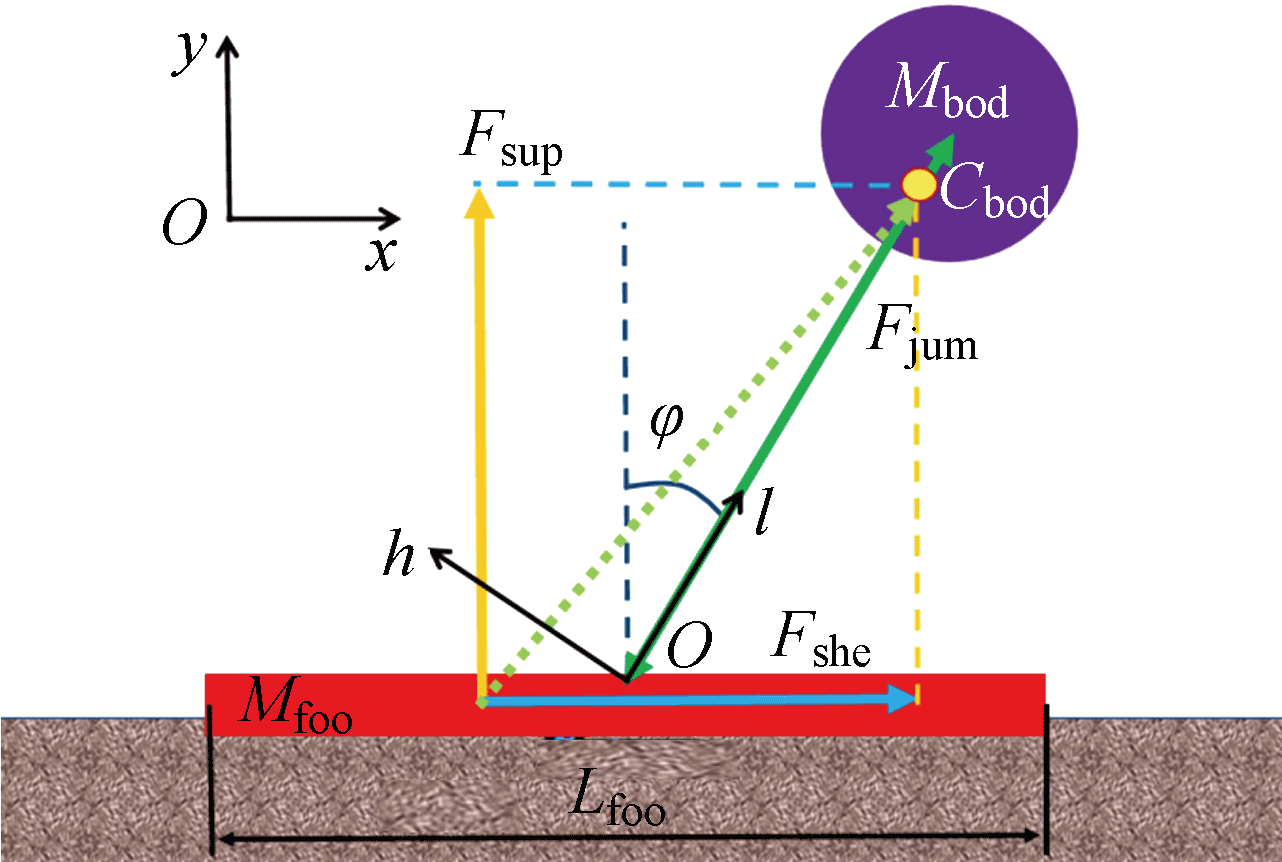

图14
抽象机器人耦合仿真起跳过程
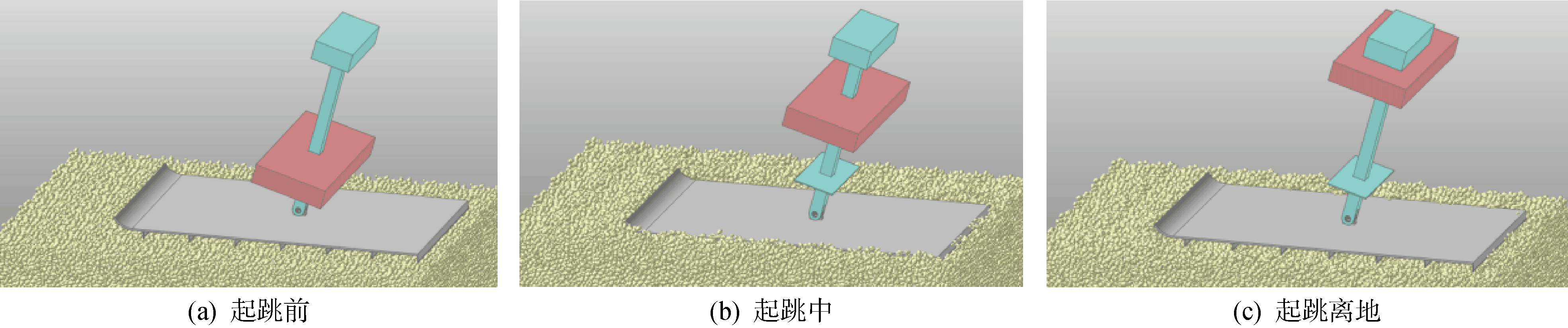

图15
起跳过程动力学模型计算结果与耦合仿真结果比较

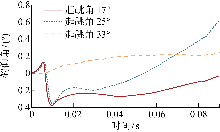
图16
起跳过程机器人俯仰角变化曲线
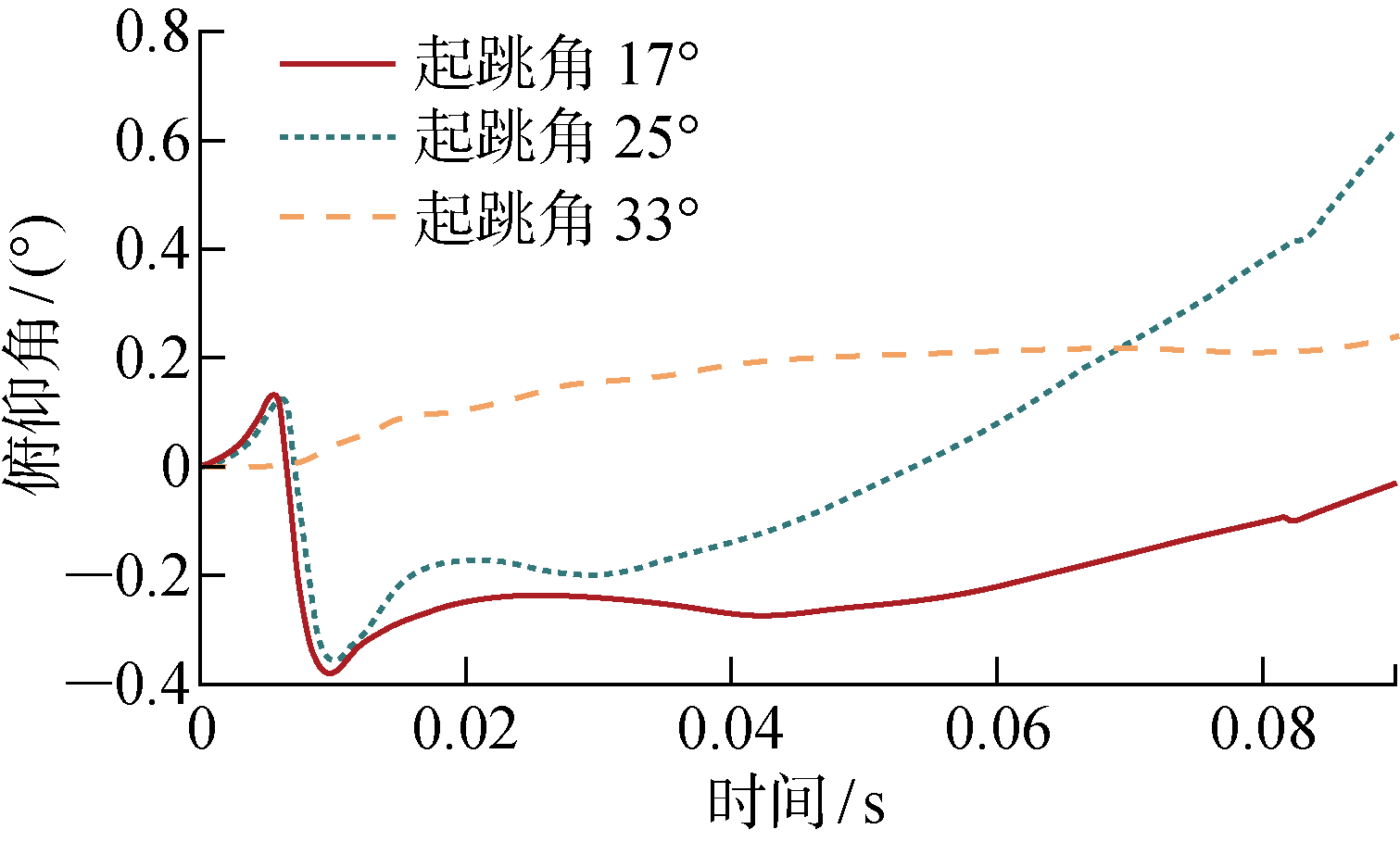

图17
储能方案优化过程示意图
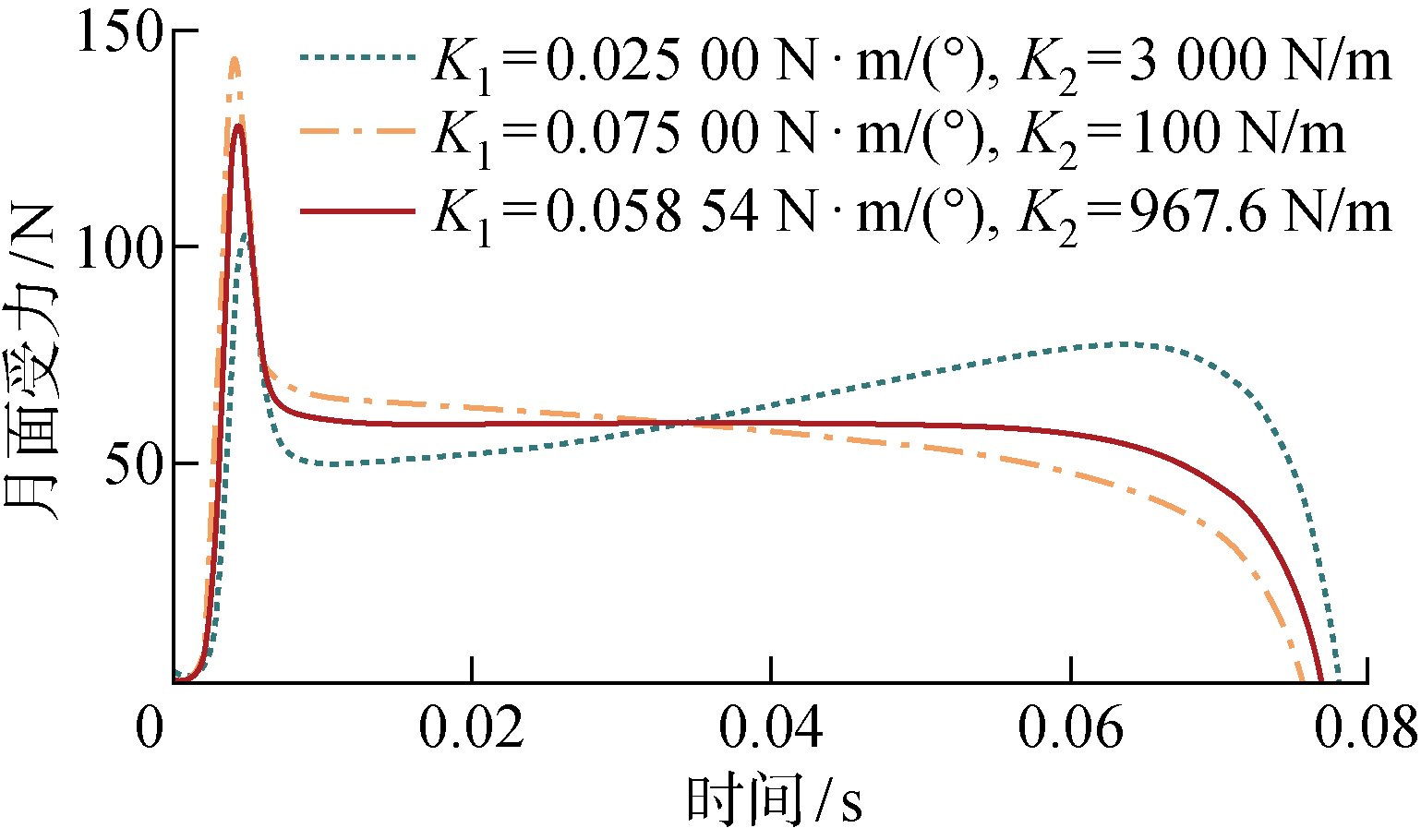
图18
机器人月面起跳动力学理论与仿真结果对比图
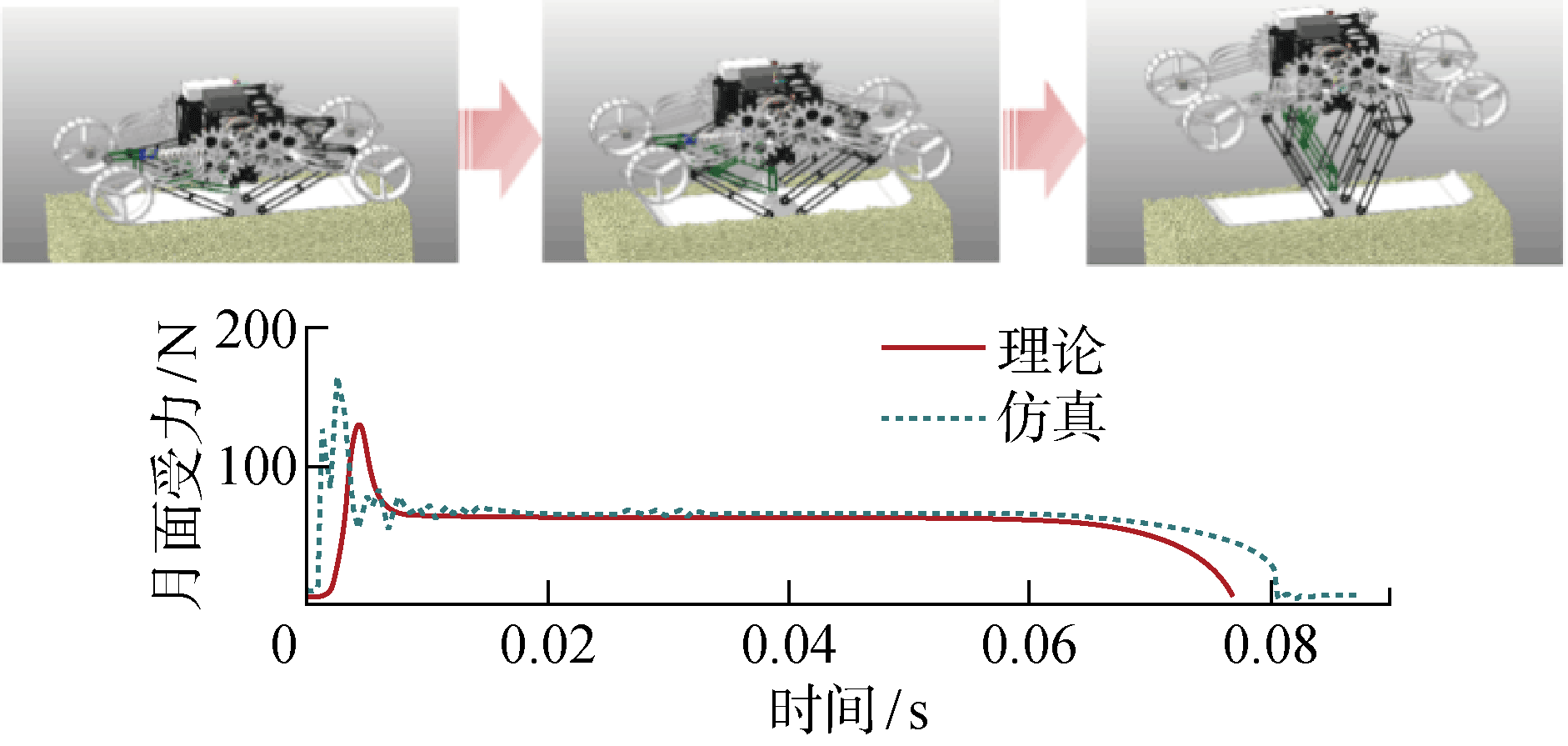
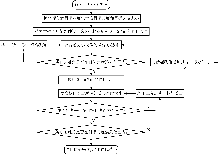
图19
精确跳跃到点的运动规划算法逻辑框图
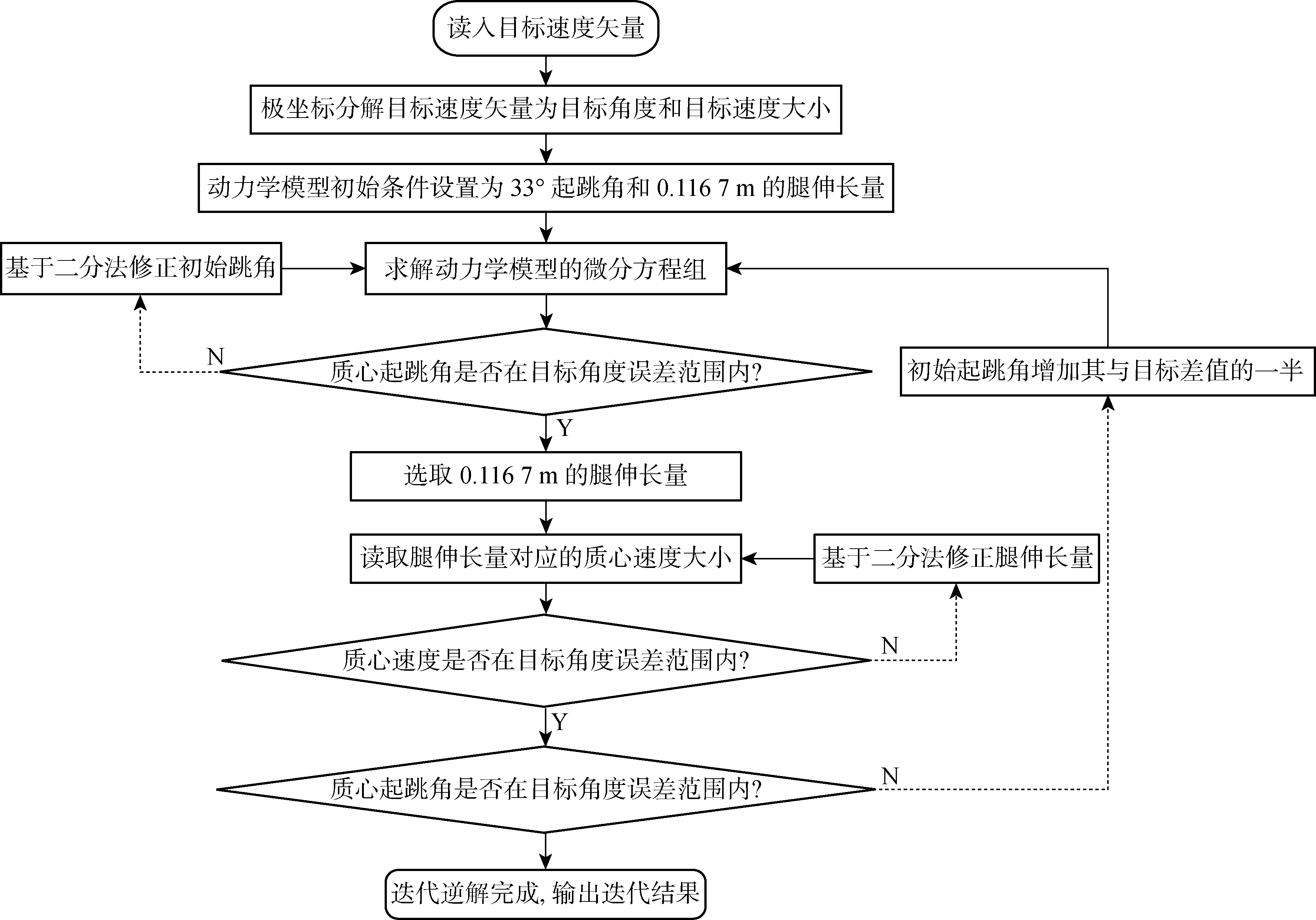
图20
落地主动缓冲的运动规划算法逻辑框图
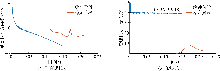
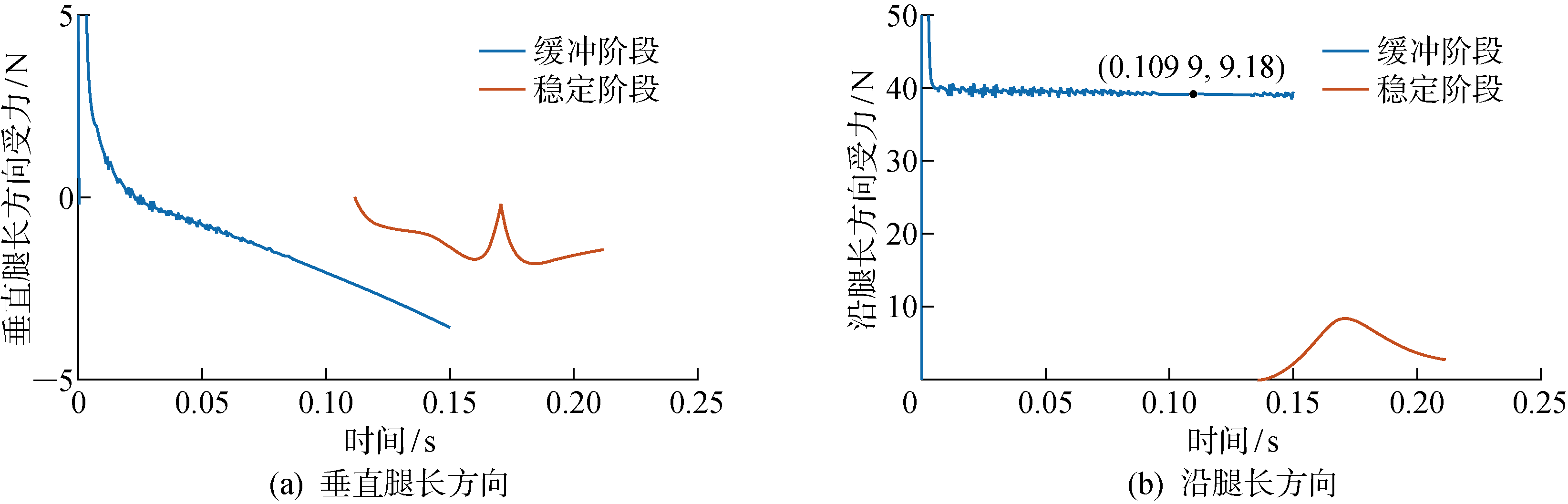
图21
跳跃机器人最优缓冲规划的落地过程中外力作用结果
| [1] | 肖福根, 庞贺伟. 月球地质形貌及其环境概述[J]. 航天器环境工程, 2003(2): 5-14. |
| XIAO Fugen, PANG Hewei. An overview of lunar geological features and their environment[J]. Spacecraft Environmental Engineering, 2003(2): 5-14. | |
| [2] | 叶培建, 肖福根. 月球探测工程中的月球环境问题[J]. 航天器环境工程, 2006(1): 1-11. |
| YE Peijian, XIAO Fugen. Lunar environment problems in lunar exploration project[J]. Spacecraft Environmental Engineering, 2006(1): 1-11. | |
| [3] | 李贺, 王禹, 杜小振, 等. 一种可跳跃的月面移动机器人系统设计[J]. 深空探测学报(中英文), 2020, 7(3): 304-310. |
|
LI He, WANG Yu, DU Xiaozhen, et al. Design of a lunar mobile robot with jumping ability[J]. Journal of Deep Space Exploration, 2020, 7(3): 304-310.
doi: 10.15982/j.issn.2095-7777.2020.20191011011 |
|
| [4] | YOSHIKAWA K, OTSUKI M, KUBOTA T, et al. A new mechanism of smart jumping robot for lunar or planetary satellites exploration[C]// 2017 IEEE Aerospace Conference. Washington, D. C.,USA: IEEE, 2017: 1-7. |
| [5] | ACKERMAN E. Boston dynamics sand flea robot demonstrates astonishing jumping skills[J]. IEEE Spectrum Robotics Blog, 2012, 2(1): 1. |
| [6] | LI F, LIU W, FU X. Jumping like an insect:Design and dynamic optimization of a jumping mini robot based on bio-mimetic inspiration[J]. Mechatronics, 2012, 22(2): 167-176. |
| [7] | HALDANE D W, PLECNIK M M, YIM J K, et al. Robotic vertical jumping agility via series-elastic power modulation[J]. Science Robotics, 2016, 1(1): eaag2048. |
| [8] |
陈子明, 卢杰, 邓朋, 等. 基于弹尾虫运动机制的平衡轮式跳跃机器人的设计[J]. 机械工程学报, 2020, 56(17): 20-28.
doi: 10.3901/JME.2020.17.020 |
| CHEN Ziming, LU Jie, DENG Peng, et al. Design of balanced wheeled jumping robot based on the motion mechanism of springtail[J]. Chinese Journal of Mechanical Engineering, 2020, 56(17): 20-28. | |
| [9] | BOSWORTH W, WHITNEY J, KIM S, et al. Robot locomotion on hard and soft ground:Measuring stabili两个方向的位移,具有两个自由度.故定ty and ground properties in-situ[C]// International Conference on Robotics and Automation (ICRA). Washington, D. C., USA: IEEE, 2016: 3582-3589. |
| [10] | 马传帅, 文桂林, 周景宇, 等. 月球车沙地行驶动力学建模与仿真[J]. 机械工程学报, 2011, 47(23): 97-103. |
| MA Chuanshuai, WEN Guilin, ZHOU Jingyu, et al. Whole-vehicle dynamical model and simulation for lunar rover traveling on the loose soil[J]. Chinese Journal of Mechanical Engineering, 2011, 47(23): 97-103. | |
| [11] |
梁忠超, 王永富, 高海波, 等. 基于应力修正的载人月球车车轮侧向力模型研究[J]. 机械工程学报, 2017, 53(9): 14-21.
doi: 10.3901/JME.2017.09.014 |
| LIANG Zhongchao, WANG Yongfu, GAO Haibo, et al. Lateral force model of lunar roving vehicle’s wheel based on pressure modifying[J]. Chinese Journal of Mechanical Engineering, 2017, 53(9): 14-21. | |
| [12] | BEKKER M G. Theory of land locomotion: The mechanics of vehicle mobility[M]. Ann Arbor,USA: University of Michigan Press, 1956: 45-50. |
| [13] | 张宇, 陈善雄, 余飞, 等. 低应力水平下 CAS-1 模拟月壤力学特性试验研究[J]. 岩石力学与工程学报, 2015, 34(1): 174-181. |
| ZHANG Yu, CHEN Shanxiong, YU Fei, et al. Experimental study on mechanical properties of CAS-1 lunar soil under low stress[J]. Chinese Journal of Rock Mechanics and Engineering, 2015, 34(1): 174-181. | |
| [14] | 张宇, 余飞, 陈善雄, 等. CAS-1 模拟月壤动剪切模量与阻尼比的试验研究[J]. 岩土力学, 2014, 35(1): 74-82. |
| ZHANG Yu, YU Fei, CHEN Shanxiong, et al. Experimental study of dynamic shear modulus and damping ratio of CAS-1 lunar soil simulant[J]. Rock and Soil Mechanics, 2014, 35(1): 74-82. | |
| [15] | 黄晗, 吴宝广, 许述财, 等. 高密实度模拟月壤力学特性试验研究[J]. 农业工程学报, 2019, 35(1): 31-38. |
| HUANG Han, WU Baoguang, XU Shucai, et al. Test study on mechanical properties of lunar soil simulant under high compactness condition[J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(1): 31-38. | |
| [16] | 王康, 姚猛, 李立犇, 等. 基于月面表取采样触月压痕的月壤力学状态分析[J]. 吉林大学学报(工学版), 2021, 51(3): 1146-1152. |
| WANG Kang, YAO Meng, LI Liben, et al. Mechanical performance identification for lunar soil in lunar surface sampling[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3): 1146-1152. | |
| [17] | 田野, 李晨昊, 李楠楠, 等. 基于应力波反射法的模拟月壤特性研究[J]. 机械制造, 2021, 59(11): 1-3. |
| TIAN Ye, LI Chenhao, LI Nannan, et al. Study on characteristics of simulated lunar soil based on stress wave reflection method[J]. Machinery, 2021, 59(11): 1-3. | |
| [18] | 邹猛, 李建桥, 贾阳, 等. 月壤静力学特性的离散元模拟[J]. 吉林大学学报(工学版), 2008(2): 383-387. |
| ZOU Meng, LI Jianqiao, JIA Yang, et al. Statics characteristics of lunar soil by DEM simulation[J]. Journal of Jilin University (Engineering and Technology Edition), 2008(2): 383-387. | |
| [19] |
林呈祥, 钟世英, 凌道盛. 模拟月壤颗粒形状特征及其对抗剪强度影响分析[J]. 东北大学学报(自然科学版), 2016, 37(11): 1640-1644.
doi: 10.12068/j.issn.1005-3026.2016.11.025 |
| LIN Chengxiang, ZHONG Shiying, LING Daosheng. Analysis of particle shape characteristics of lunar soil simulant and its effect on shear strength[J]. Journal of Northeastern University (Natural Science), 2016, 37(11): 1640-1644. | |
| [20] | 林云成, 李立犇, 赵振家, 等. 着陆器足垫冲击月壤动态行为离散元仿真分析[J]. 深空探测学报, 2020, 7(2): 171-177. |
|
LIN Yuncheng, LI Liben, ZHAO Zhenjia, et al. Simulation analysis of dynamic behavior of lander footpad impact on lunar regolith[J]. Journal of Deep Space Exploration, 2020, 7(2): 171-177.
doi: 10.15982/j.issn.2095-7777.2020.20190313002 |
|
| [21] | 黄雨, 蒋馥鸿. 月壤工程地质特性综述[J]. 同济大学学报(自然科学版), 2013, 41(9): 1281-1285. |
| HUANG Yu, JIANG Fuhong. Review of engineer geological characteristics of lunar regolith[J]. Journal of Tongji University (Natural Science), 2013, 41(9): 1281-1285. | |
| [22] | 郑永春, 欧阳自远, 王世杰, 等. 月壤的物理和机械性质[J]. 矿物岩石, 2004(4): 14-19. |
| ZHENG Yongchun, OUYANG Ziyuan, WANG Shijie, et al. Physical and mechanical properties of lunar regolith[J]. Mineralogy and Petrology, 2004(4): 14-19. |
| [1] | 肖贾光毅, 肖志成, 唐旭, 张煜坤, 郭舒宇. 风扇叶片-柔性机匣碰摩动力学模型及应用[J]. 上海交通大学学报, 2026, 60(3): 499-510. |
| [2] | 唐建国1, 2, 毛竞航1, 2, 刘明月1, 2. 集成舵的深海着陆器设计及分层滑模路径跟踪[J]. 海洋工程装备与技术, 2025, 12(1): 106-118. |
| [3] | 王克帆, 邱潇颀, 高长生, 荆武兴. 临近空间太阳能无人机横航向变质心控制技术[J]. 空天防御, 2021, 4(4): 29-36. |
| [4] | 郑钰馨,奚鹰,袁浪,卜王辉. 直齿轮纯扭转模型弹性动力学分析[J]. 上海交通大学学报(自然版), 2019, 53(3): 285-296. |
| [5] | 李亮,解茂昭,贾明,刘宏升. 超临界射流模型的构建及验证[J]. 上海交通大学学报, 2018, 52(9): 1058-1064. |
| [6] | 李琳a,余海东a,b,陶建峰a,刘成良a. 变刚度条件下隧道掘进机撑靴液压缸的动态特性[J]. 上海交通大学学报, 2017, 51(9): 1058-1064. |
| [7] | 肖尧,阮晓钢,魏若岩. 基于3维模型的月球表面软着陆燃耗最优制导方法[J]. 上海交通大学学报, 2017, 51(6): 734-740. |
| [8] | 罗莉华. 基于MPC的车道保持系统转向控制策略[J]. 上海交通大学学报(自然版), 2014, 48(07): 1015-1020. |
| [9] | 张建政, 高峰, 赵现朝, 马春翔. 六维并联地震模拟器机构的动力学分析与仿真[J]. 上海交通大学学报(自然版), 2011, 45(09): 1263-1268. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||