上海交通大学学报 ›› 2025, Vol. 59 ›› Issue (8): 1203-1215.doi: 10.16183/j.cnki.jsjtu.2023.508
黄自鑫1,2( ), 于澄嵩1, 汪伟1, 林梦颖1, 徐达3
), 于澄嵩1, 汪伟1, 林梦颖1, 徐达3
收稿日期:2023-10-10
修回日期:2023-11-27
接受日期:2023-12-27
出版日期:2025-08-28
发布日期:2025-08-26
作者简介:黄自鑫(1988—),副教授,现主要从事欠驱动系统智能控制研究;E-mail:huangzx@wit.edu.cn.
基金资助:
HUANG Zixin1,2(), YU Chengsong1, WANG Wei1, LIN Mengying1, XU Da3
Received:2023-10-10
Revised:2023-11-27
Accepted:2023-12-27
Online:2025-08-28
Published:2025-08-26
摘要:
针对电压变换和外部条件等因素引起三相电压型脉宽调制(PWM)整流器工作异常的问题,提出了一种基于等价输入干扰(EID)误差估计的自抗扰控制(ADRC)和新型终端模糊滑模电流控制的控制策略.通过对三相电压型PWM整流器系统的欠驱动特性分析,构建了基于等价输入干扰误差估计的新型终端模糊滑模控制的电流环控制器,以及基于等价输入干扰误差估计的自抗扰控制的电压环控制器的双闭环结构控制器.通过对滑模控制中存在的电流抖振和负序电流问题进行误差估计,提高控制器精度,优化控制效果,抑制电压环控制器系统谐波量,提升电压的响应速率,确保三相电压型PWM整流器在干扰情况下的稳定工作.最后通过仿真实验进行分析,验证了所提控制策略的有效性与优越性.
中图分类号:
黄自鑫, 于澄嵩, 汪伟, 林梦颖, 徐达. 基于等价输入干扰误差估计的欠驱动脉宽调制整流器自抗扰控制[J]. 上海交通大学学报, 2025, 59(8): 1203-1215.
HUANG Zixin, YU Chengsong, WANG Wei, LIN Mengying, XU Da. Active Disturbance Rejection Control for Underactuated PWM Rectifier Based on Equivalent Input Disturbance Error Estimation[J]. Journal of Shanghai Jiao Tong University, 2025, 59(8): 1203-1215.
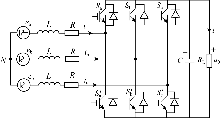
图1
PWM整流器电路结构拓扑图
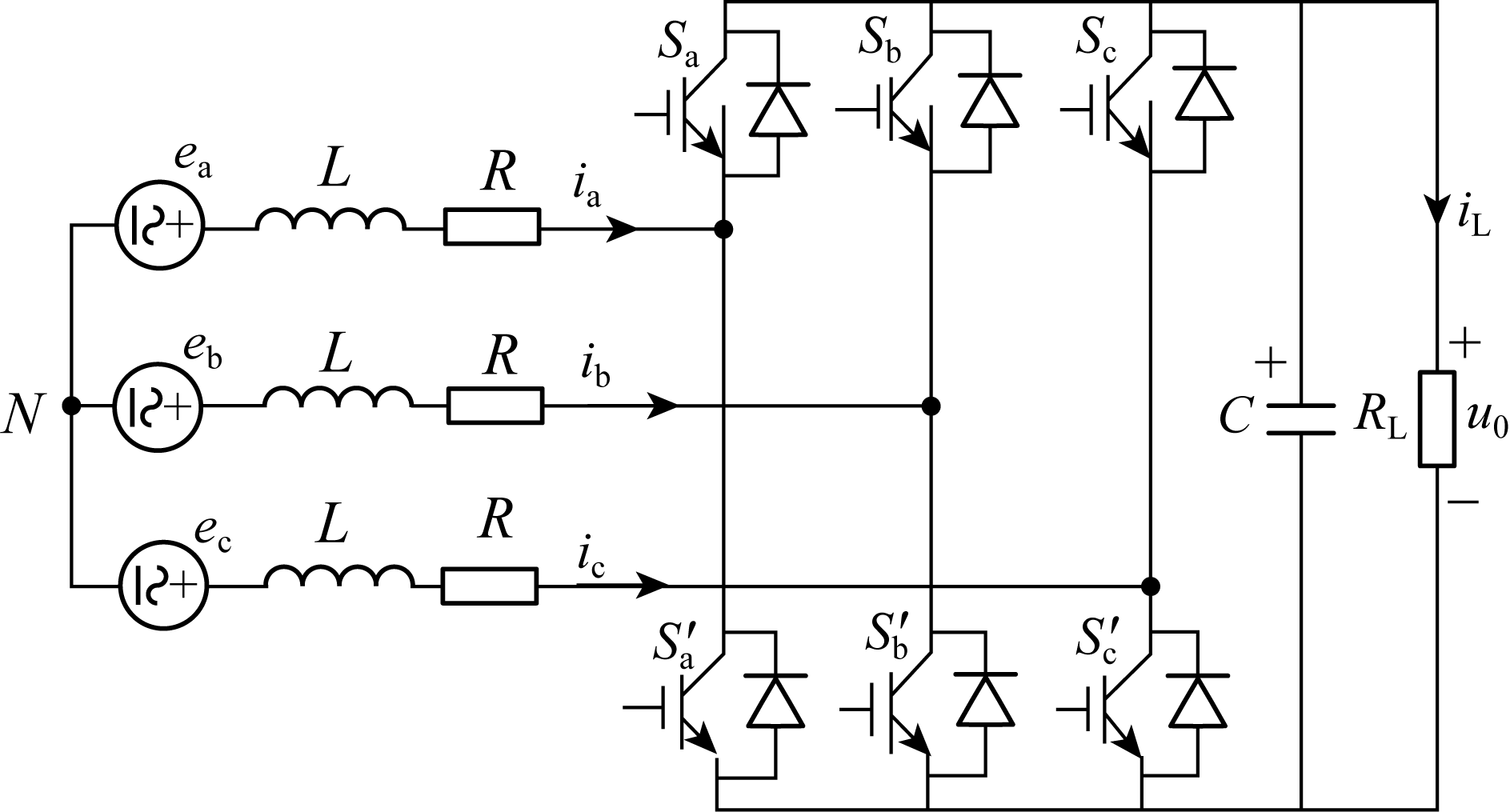
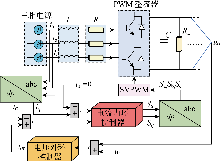
图2
PWM整流器的双闭环控制系统结构

图3
模糊输入对应的隶属度函数

表1
模糊推理规则
| 输入/输出 | 模糊规则 | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| Δη1,2 | NB | NB | NM | ZO | PM | PB | PB |
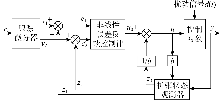
图4
ADRC的结构图

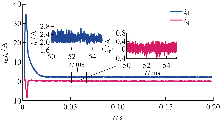
图5
方波状抖动下id, iq波形图

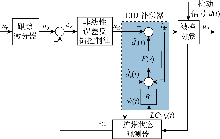
图6
EID/ADRC控制器

表2
PWM整流器的实验仿真模型系统参数
| 参数 | 取值 |
|---|---|
| 电网相电压峰值,UN/V | 80 |
| 交流电压频率,fN/Hz | 50 |
| L/mH | 3 |
| C/nF | 1 |
| R/Ω | 0.2 |
| RL/Ω | 40 |
| 开关频率,fs/kHz | 10 |
| ur/V | 200 |

图7
稳态运行实验下u0波型

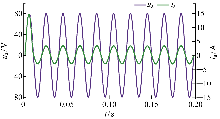
图8
本文所提出方法下ua和ia的波形 (稳态运行实验)
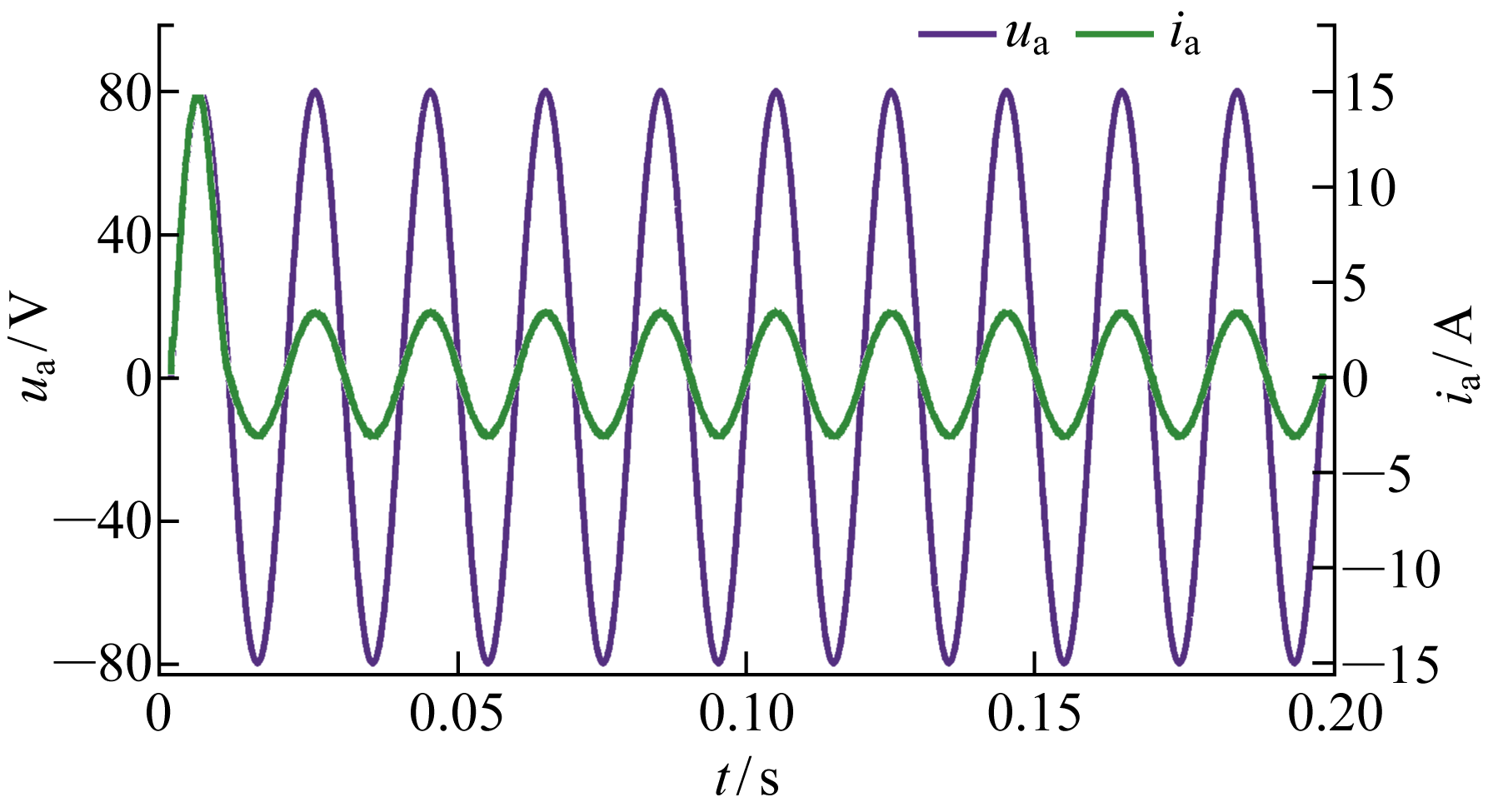
图9
ADRC方法下ua和ia的波形 (稳态运行实验)

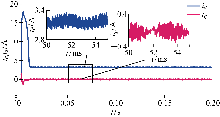
图10
本文所提出方法下id, iq的波形 (稳态运行实验)

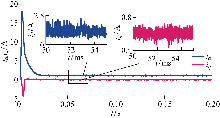
图11
ADRC方法下id, iq的波形 (稳态运行实验)

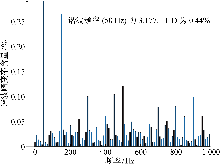
图12
本文所提出方法的谐波畸变率值 (稳态运行实验)


图13
ADRC方法的谐波畸变率值 (稳态运行实验)

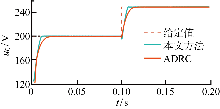
图14
电压突变实验下u0波型

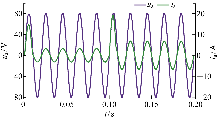
图15
本文所提出方法下ua和ia的波形 (电压突变实验)

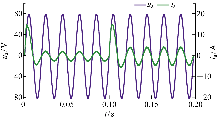
图16
ADRC方法下ua和ia的波形 (电压突变实验)

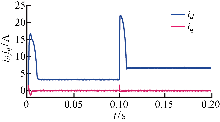
图17
本文所提出方法下id, iq的波形 (电压突变实验)


图18
ADRC方法下id, iq的波形 (电压突变实验)

表3
实验仿真结果数据对比
| 方法 | id, iq稳态时间 (稳态运行)/s | id, iq稳态时间 (电压突变)/s | 功率因数 | 响应时间 (稳态运行)/s | 响应时间 (电压突变)/s | 电网 THD/% |
|---|---|---|---|---|---|---|
| ADRC | 0.025 | 0.02 | 0.995 | 0.025 | 0.02 | 2.29 |
| 本文方法 | 0.01 | 0.01 | 0.999 | 0.015 | 0.01 | 0.44 |
| [1] |
王文彬, 郑蜀江, 范瑞祥, 等. “双碳”背景下微网分布式电能交易绩效评价指标与方法[J]. 上海交通大学学报, 2022, 56(3): 312-324.
doi: 10.16183/j.cnki.jsjtu.2021.391 |
| WANG Wenbin, ZHENG Shujiang, FAN Ruixiang, et al. Performance evaluation index and method of micro grid distributed electricity trading under the background of “carbon peaking and carbon neutrality”[J]. Journal of Shanghai Jiao Tong University, 2022, 56(3): 312-324. | |
| [2] |
陈文溆乐, 向月, 彭光博, 等. “双碳”目标下电力系统供给侧形态发展系统动力学建模与分析[J]. 上海交通大学学报, 2021, 55(12): 1567-1576.
doi: 10.16183/j.cnki.jsjtu.2021.294 |
| CHEN Wenxule, XIANG Yue, PENG Guangbo, et al. System dynamic modeling and analysis of power system supply side morphological development with dual carbon targets[J]. Journal of Shanghai Jiao Tong University, 2021, 55(12): 1567-1576. | |
| [3] | CHUNG H, MAHARJAN S, ZHANG Y, et al. Distributed deep reinforcement learning for intelligent load scheduling in residential smart grids[J]. IEEE Transactions on Industrial Informatics, 2021, 17(4): 2752-2763. |
| [4] | 程启明, 程尹曼, 薛阳, 等. 三相电压源型PWM整流器控制方法的发展综述[J]. 电力系统保护与控制, 2012, 40(3): 145-155. |
| CHENG Qiming, CHENG Yinman, XUE Yang, et al. A summary of current control methods for three-phase voltage-source PWM rectifiers[J]. Power System Protection and Control, 2012, 40(3): 145-155. | |
| [5] | 周诗嘉, 杨光源, 彭光强, 等. 基于多相风力发电系统的容错控制策略研究[J]. 中国电力, 2022, 55(7): 134-141. |
| ZHOU Shijia, YANG Guangyuan, PENG Guangqiang, et al. Fault-tolerant control strategy based on multi-phase wind power system[J]. Electric Power, 2022, 55(7): 134-141. | |
| [6] | 王屹, 高鹏, 赵勇. 基于三电平PWM整流器的超导储能系统直接功率控制[J]. 低温物理学报, 2012, 34(2): 117-121. |
| WANG Yi, GAO Peng, ZHAO Yong. A direct power control method for superconducting magnetic energy storage system based on three-level PWM rectifier[J]. Chinese Journal of Low Temperature Physics, 2012, 34(2): 117-121. | |
| [7] | 朱进权, 葛琼璇, 王晓新, 等. 基于自抗扰和负载功率前馈的高速磁悬浮系统PWM整流器控制策略[J]. 电工技术学报, 2021, 36(2): 320-329. |
| ZHU Jinquan, GE Qiongxuan, WANG Xiaoxin, et al. Control strategy for PWM rectifier of high-speed maglev based on active disturbance rejection control and load power feed-forward[J]. Transactions of China Electrotechnical Society, 2021, 36(2): 320-329. | |
| [8] | 赵翔, 陈良亮, 李明贞, 等. 一种基于深度神经网络的直流充电桩故障诊断方法[J]. 电测与仪表, 2021, 58(6): 148-152. |
| ZHAO Xiang, CHEN Liangliang, LI Mingzhen, et al. A fault diagnosis method for DC charging pile based on deep neural network[J]. Electrical Measurement and Instrumentation, 2021, 58(6): 148-152. | |
| [9] | MA Y, LI D, LI Y, et al. A novel discrete compound integral terminal sliding mode control with disturbance compensation for PMSM speed system[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(1): 549-560. |
| [10] | 张晓华, 郭源博, 周鑫, 等. PWM整流器的欠驱动特性与非线性控制[J]. 中国电机工程学报, 2011, 31(33): 85-92. |
| ZHANG Xiaohua, GUO Yuanbo, ZHOU Xin, et al. Underactuated property and nonlinear control for PWM rectifier[J]. Proceedings of the CSEE, 2011, 31(33): 85-92. | |
| [11] | 黄自鑫, 秦翔宇, 王乐君. 二阶非完整平面欠驱动机械系统的位置控制[J]. 武汉工程大学学报, 2021, 43(5): 567-572. |
| HUANG Zixin, QIN Xiangyu, WANG Lejun. Position control of second-order nonholonomic planar underactuated mechanical system[J]. Journal of Wuhan Institute of Technology, 2021, 43(5): 567-572. | |
| [12] | 姚绪梁, 马赫, 王景芳, 等. 三相电压型PWM整流器新型开关表直接功率控制[J]. 中国电机工程学报, 2023, 43(16): 6407-6418. |
| YAO Xuliang, MA He, WANG Jingfang, et al. New switching table direct power control for three-phase voltage source PWM rectifier[J]. Proceedings of the CSEE, 2023, 43(16): 6407-6418. | |
| [13] | 肖雄, 武玉娟, 孙广达, 等. 基于自适应神经网络观测的无电压传感器PWM整流器功率预测控制[J]. 中国电机工程学报, 2021, 41(3): 1135-1146. |
| XIAO Xiong, WU Yujuan, SUN Guangda, et al. Voltage-sensorless model predictive power control of PWM rectifier based on adaptive neural network observation[J]. Proceedings of the CSEE, 2021, 41(3): 1135-1146. | |
| [14] | 曾俊杰, 苏鑫, 李正, 等. 三相电压型PWM整流器的自抗扰控制研究[J]. 计算机测量与控制, 2023, 31(1): 93-99. |
| ZENG Junjie, SU Xin, LI Zheng, et al. Research on active disturbance rejection control of three phase voltage type PWM rectifier[J]. Computer Measurement and Control, 2023, 31(1): 93-99. | |
| [15] | 魏昂, 王丹, 武文杰, 等. 降低不平衡电网下PWM整流器开关频率的顺序模型预测直接功率控制方法[J]. 电网技术, 2021, 45(7): 2700-2708. |
| WEI Ang, WANG Dan, WU Wenjie, et al. Sequential model predictive control to reduce the switching of PWM rectifier under unbalanced grid-side conditions[J]. Power System Technology, 2021, 45(7): 2700-2708. | |
| [16] | YANG X, HU H, HU H, et al. A quasi-resonant extended state observer-based predictive current control strategy for three-phase PWM rectifier[J]. IEEE Transactions on Industrial Electronics, 2022, 69(12): 13910-13917. |
| [17] | WODYK S, IWANSKI G. Vibrating coordinates frame transformation based unity power factor control of a three-phase converter at grid voltage imbalance and harmonics[J]. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1114-1123. |
| [18] | 赵峰, 李述特, 陈小强, 等. 不平衡电网下三相PWM整流器预测直接功率控制[J]. 电网技术, 2022, 46(3): 870-879. |
| ZHAO Feng, LI Shute, CHEN Xiaoqiang, et al. Predictive direct power control of three phase PWM rectifier under unbalanced grid[J]. Power System Technology, 2022, 46(3): 870-879. | |
| [19] | 熊成林, 宋爽, 梅荣, 等. 基于改进虚拟正交信号的单相PWM整流器模型预测功率控制[J]. 电机与控制学报, 2021, 25(11): 16-24. |
| XIONG Chenglin, SONG Shuang, MEI Rong, et al. Model predictive power control of single-phase PWM rectifier based on improved virtual quadrature signal[J]. Electric Machines and Control, 2021, 25(11): 16-24. | |
| [20] | ZHANG G, LIU Z, YAO S, et al. Suppression of low-frequency oscillation in traction network of high-speed railway based on auto-disturbance rejection control[J]. IEEE Transactions on Transportation Electrification, 2016, 2(2): 244-255. |
| [21] | LASALLE J. Stability theory for ordinary differential equations[J]. Journal of Differential Equations, 1968, 4(1): 57-65. |
| [22] | SHE J, FANG M, OHYAMA Y, et al. Improving disturbance-rejection performance based on an equivalent-input-disturbance approach[J]. IEEE Transactions on Industrial Electronics, 2008, 55(1): 380-389. |
| [23] | 王占扩, 张永昌, 童朝南. 一种改进的三相PWM整流器模型预测控制方法研究[J]. 电机与控制学报, 2020, 24(7): 73-81. |
| WANG Zhankuo, ZHANG Yongchang, TONG Chaonan. Improved model predictive direct power control for three-phase PWM rectifier[J]. Electric Machines and Control, 2020, 24(7): 73-81. | |
| [24] | 余晨辉, 汪凤翔, 林贵应. 基于在线扰动补偿的三电平PWM整流器级联式无差拍控制策略[J]. 电工技术学报, 2022, 37(4): 954-963. |
| YU Chenhui, WANG Fengxiang, LIN Guiying. Cascaded deadbeat control strategy with online disturbance compensation for three-level PWM rectifier[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 954-963. | |
| [25] | LIU G, WANG B, LIU F, et al. An improved zero-voltage and zero-current-switching phase-shift full-bridge PWM converter with low output current ripple[J]. IEEE Transactions on Power Electronics, 2023, 38(3): 3419-3432. |
| [1] | . 基于改进型自抗扰控制的欠驱动系统控制[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 428-439. |
| [2] | 李聪林, 皇金锋, 章乾, 陈旭. 基于高阶滤波超螺旋ESO的单电感双输出Buck变换器滑模自抗扰控制[J]. 上海交通大学学报, 2026, 60(1): 87-99. |
| [3] | 张仕鹏, 李培强, 张亦君, 刘喜凤. 基于变滤波时间常数和模糊控制的复合储能二次调频策略[J]. 上海交通大学学报, 2025, 59(9): 1370-1382. |
| [4] | . 基于模型预测控制的欠驱动USV自主航行模型[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1255-1264. |
| [5] | 赵永熹, 高鹏超, 范宏. 基于虚拟阻抗-模糊算法的交直流微电网混合储能功率协调策略[J]. 上海交通大学学报, 2025, 59(3): 388-399. |
| [6] | 李建林, 孙浩元, 赵文鼎, 梁策, 梁忠豪, 袁晓冬. 基于变分模态分解-多模糊控制的风电混储系统功率分配策略[J]. 上海交通大学学报, 2025, 59(10): 1498-1509. |
| [7] | 王晗, 王富文, 周党生, 施刚, 张建文, 蔡旭. 电网故障下永磁直驱风电机组并网电流的自抗扰控制[J]. 上海交通大学学报, 2024, 58(12): 1968-1976. |
| [8] | 韩一凡, 陈柏屹, 刘燕斌, 陈金宝. 变负载条件下多体折展机翼改进自抗扰控制方法[J]. 上海交通大学学报, 2024, 58(11): 1762-1771. |
| [9] | 阎宏磊, 陆远, 郭杰, 唐胜景, 李响. 欠驱动高超滑翔飞行器集群协同编队控制方法[J]. 空天防御, 2024, 7(1): 56-62. |
| [10] | 钱虹, 邹明耀. 变论域自适应模糊非线性控制在蒸汽发生器液位控制中的应用[J]. 上海交通大学学报, 2023, 57(1): 116-126. |
| [11] | 高伯伦, 李剑, 刘瑞恒, 吕硕, 张晓宇, 张庆振. 带终端角度约束的双闭环末制导律研究[J]. 空天防御, 2022, 5(4): 38-46. |
| [12] | 万慧, 齐晓慧, 李杰. 基于线性矩阵不等式的线性/非线性切换自抗扰控制系统的稳定性分析[J]. 上海交通大学学报, 2022, 56(11): 1491-1501. |
| [13] | 刘凯, 杨宝庆. 一种基于自抗扰方法的姿控直气复合控制系统设计[J]. 空天防御, 2021, 4(2): 40-47. |
| [14] | 张铁,吴圣和,蔡超. 基于浮动平台的机器人恒力控制研磨方法[J]. 上海交通大学学报, 2020, 54(5): 515-523. |
| [15] | 殷玮, 祁文治. 基于IMM_UKF的自抗扰控制导引律研究[J]. 空天防御, 2018, 1(1): 56-62. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||