上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (1): 103-115.doi: 10.16183/j.cnki.jsjtu.2021.325
所属专题: 《上海交通大学学报》2023年“机械与动力工程”专题
刘禹铭1, 赵勇1( ), 董正建2, 王平2, 姬煜琦2
), 董正建2, 王平2, 姬煜琦2
收稿日期:2021-08-20
修回日期:2021-10-08
出版日期:2023-01-28
发布日期:2023-01-13
通讯作者:
赵勇
E-mail:zhaoyong@sjtu.edu.cn.
作者简介:刘禹铭(1997-),硕士生,从事传感器数据融合、多智能体协同作业研究.
基金资助:
LIU Yuming1, ZHAO Yong1(), DONG Zhengjian2, WANG Ping2, JI Yuqi2
Received:2021-08-20
Revised:2021-10-08
Online:2023-01-28
Published:2023-01-13
Contact:
ZHAO Yong
E-mail:zhaoyong@sjtu.edu.cn.
摘要:
研究了一种基于反步法的多移载工装协同作业控制策略,提出了基于改进人工势场法和纯轨迹跟踪法的期望运动状态规划方案,并根据自适应蒙特卡洛定位方法确定了实际运动状态的估计值,设计了反步法与虚拟领航跟随法结合的队列控制器.构建了基于机器人操作系统(ROS)环境的仿真模型,并开展仿真验证.结果表明:提出的队形误差计算方法能够提高误差估计精度,该编队控制策略能够使得队形误差在6.2 s内收敛,所设计的队形控制器能够满足多移载工装的作业要求.
中图分类号:
刘禹铭, 赵勇, 董正建, 王平, 姬煜琦. 基于反步法的多移载工装协同作业编队控制策略[J]. 上海交通大学学报, 2023, 57(1): 103-115.
LIU Yuming, ZHAO Yong, DONG Zhengjian, WANG Ping, JI Yuqi. Formation Control Strategy of Multiple Mobile Robots Cooperative Operation Based on Backstepping Method[J]. Journal of Shanghai Jiao Tong University, 2023, 57(1): 103-115.
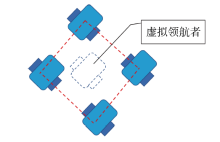
图1
虚拟领航者引领下的刚性结构队形
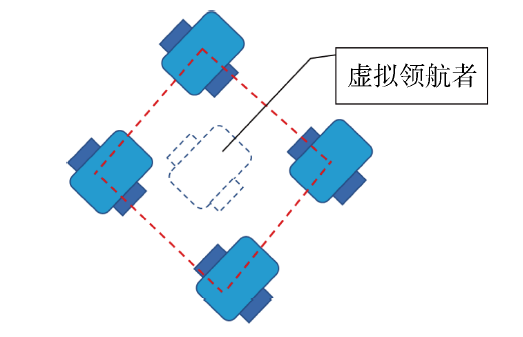
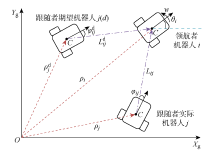
图2
领航者与跟随者编队位姿误差分析
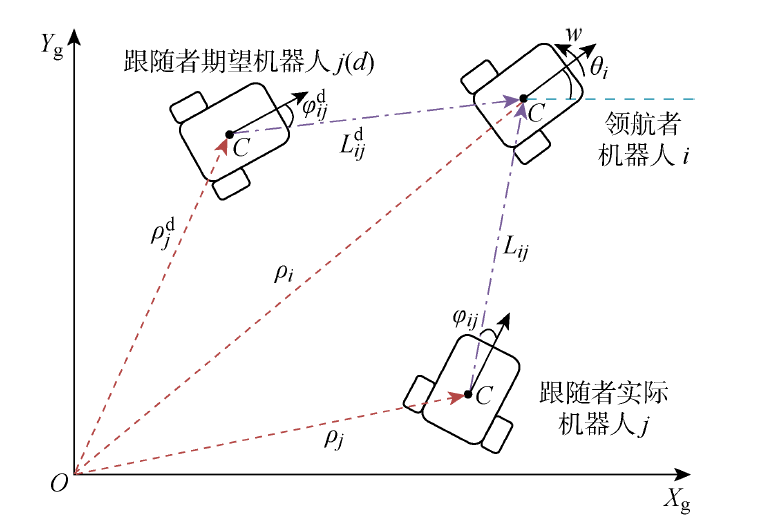

图3
整体编队控制器设计流程图
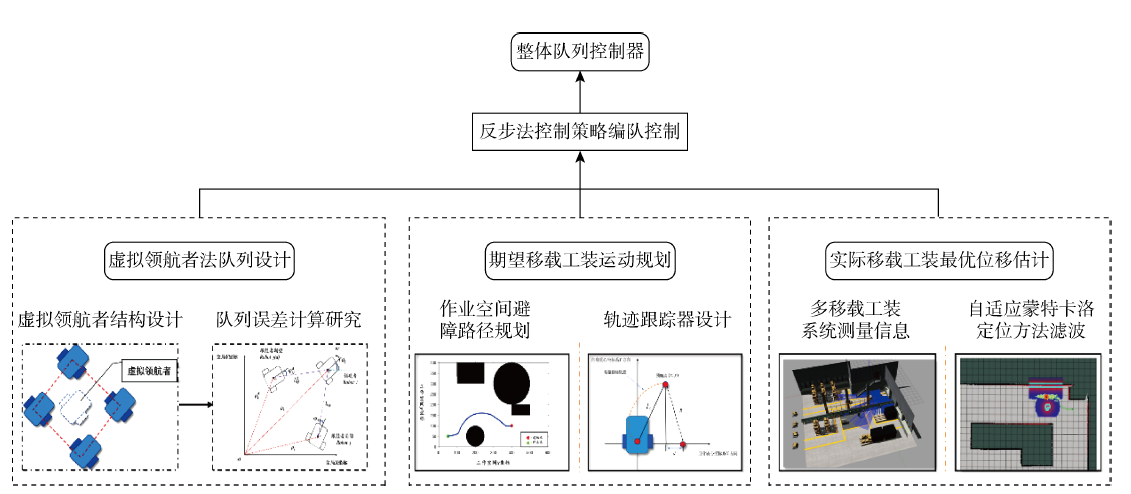
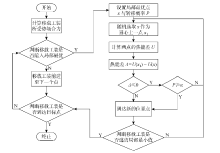
图4
结合模拟退火法的人工势场法算法流程图


图5
模拟退火法逃出局部最优示意图
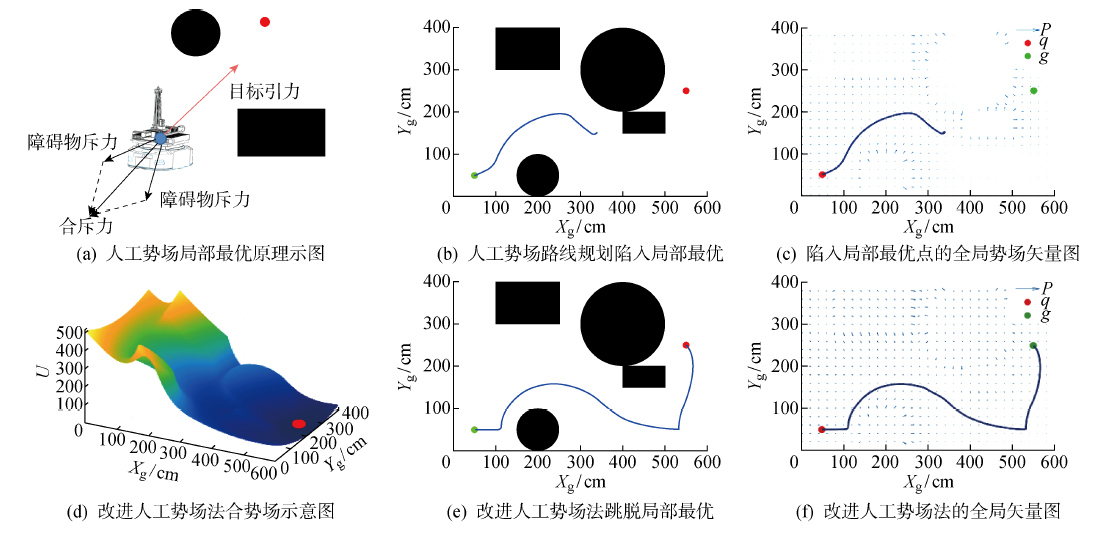
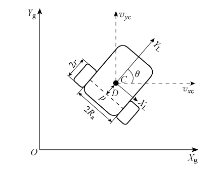
图6
移载工装简化的运动学模型示意图
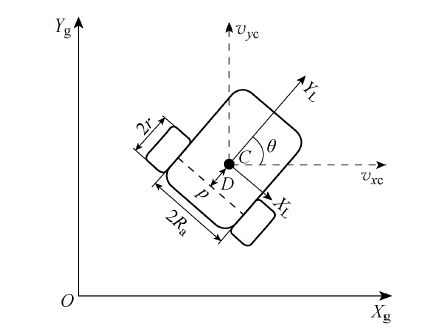
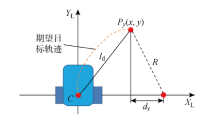
图7
纯轨迹跟踪法的几何关系示意图
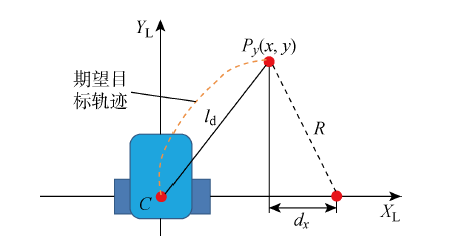

图8
AMCL算法的定位收敛过程
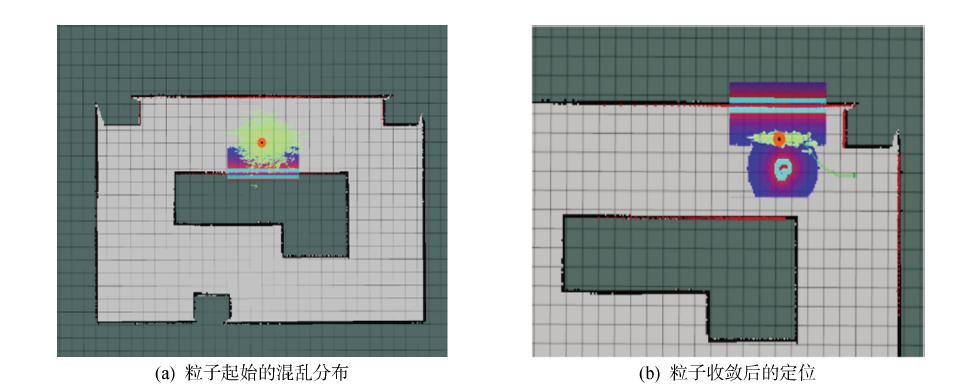
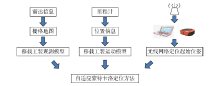
图9
AMCL算法运用于移载工装协同作业的定位流程


图10
仿真作业空间建模
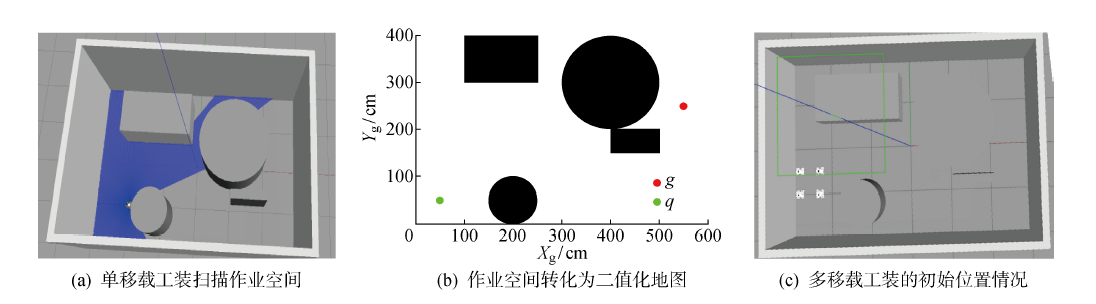
表1
移载工装技术参数
| 物理量 | 取值 |
|---|---|
| 作业空间/m | 40,60 |
| 长、宽、高/mm | 900,700,300 |
| 离地间隙/mm | 20 |
| 雷达距离精度/cm | 2 |
| 雷达距离误差协方差 | 0.001 |
| 雷达角度精度 | <0.5° |
| 雷达角度误差协方差 | 0.0001 |
| 末端精度/cm | ?5 |
| 旋转半径/cm | 0 |
| 队列距离/cm | 25 |
| 速度误差协方差 | 0.01 |
图11
移载工装作业空间内势场变化图
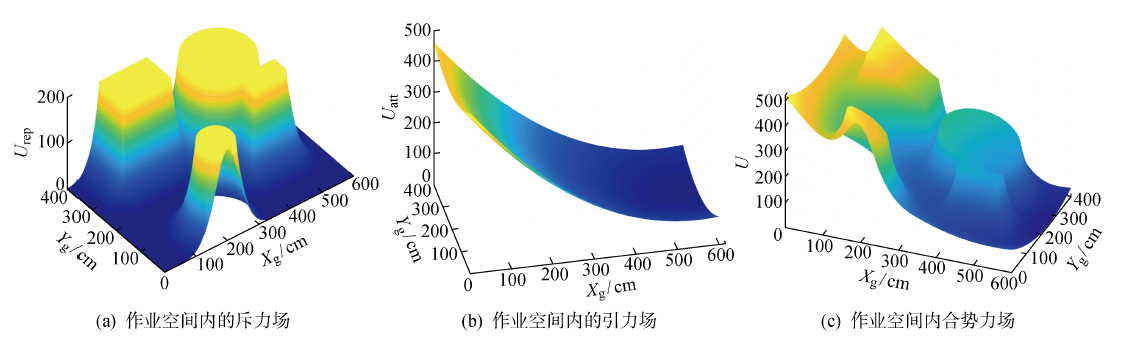

图12
差速轮移载工装运动模型
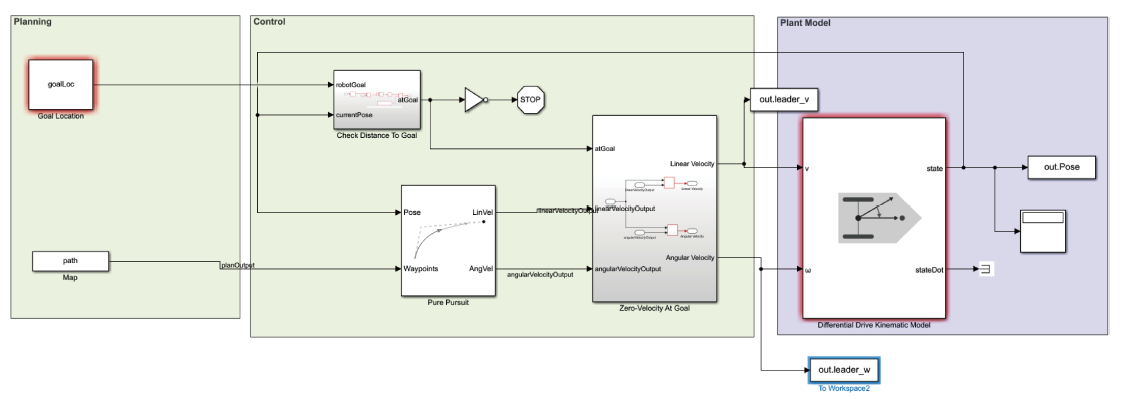

图13
传统人工势场法下失败的路径规划

图14
改进人工势场法成功规划目标路径
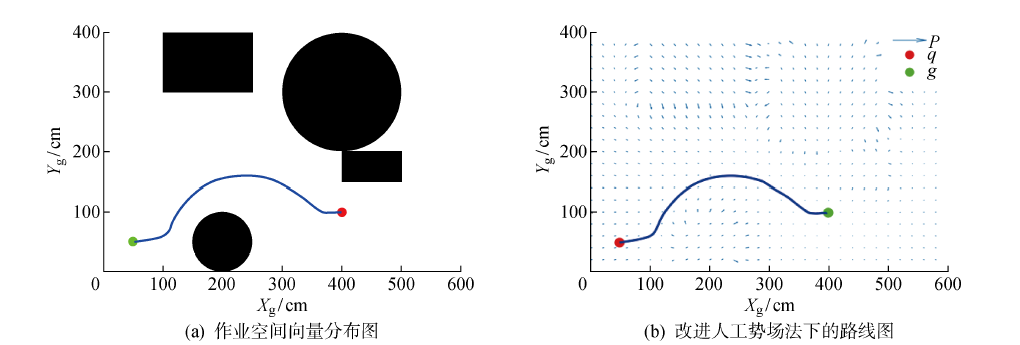
图15
虚拟领航者输入运动变量
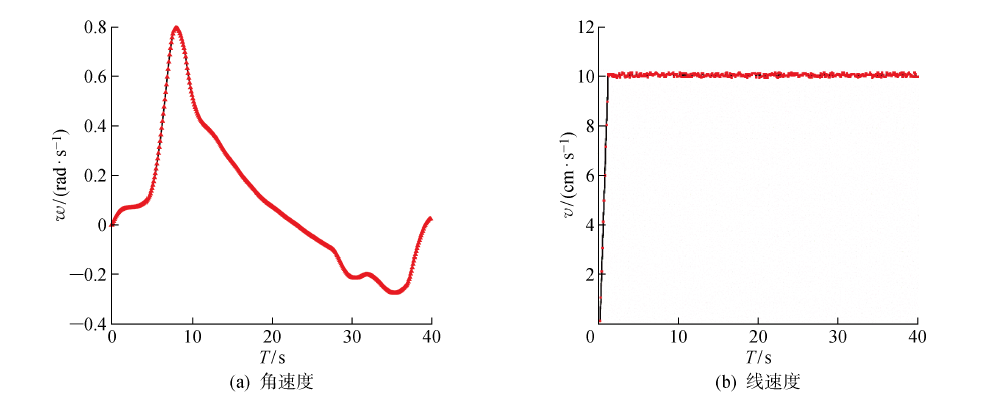

图16
纯轨迹跟踪下的期望轨迹与误差
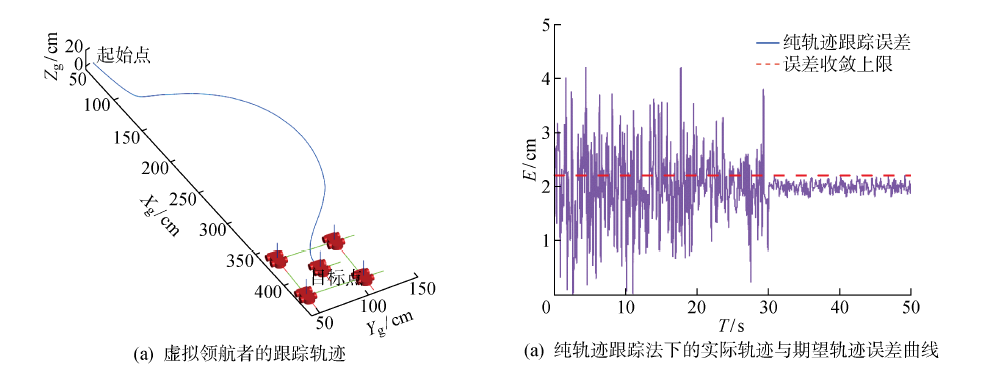

图17
自适应蒙特卡洛定位方法误差与其他方法误差对比
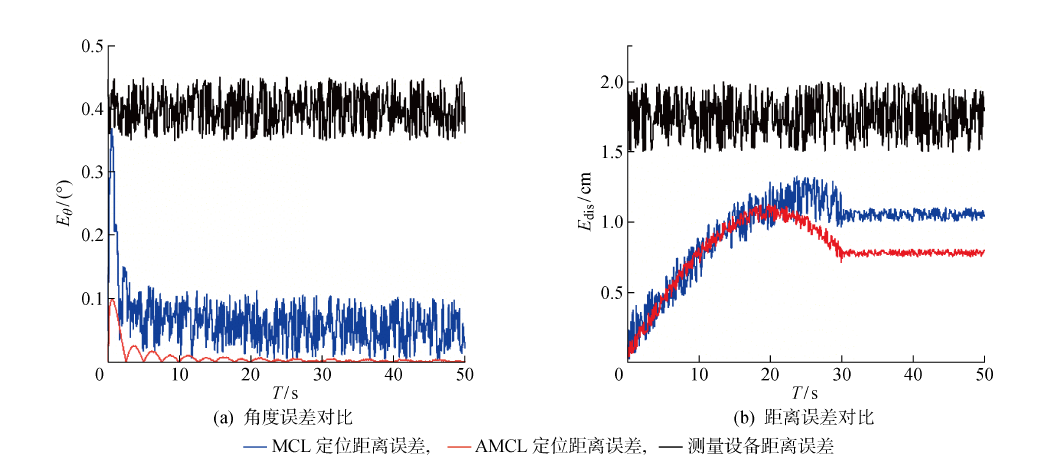
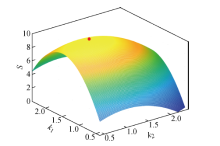
图18
反步法控制效果与参数选取关系
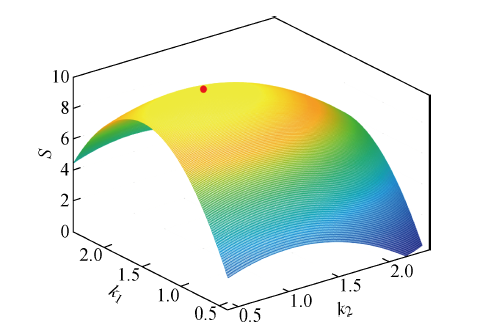
图19
跟随者理想运动轨迹设计
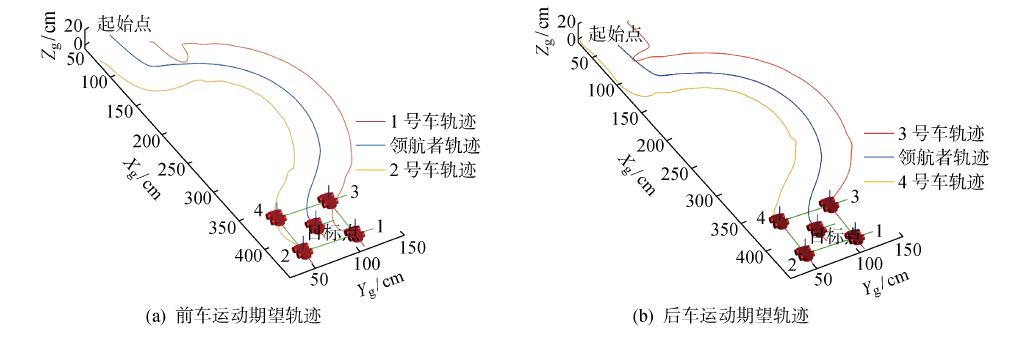
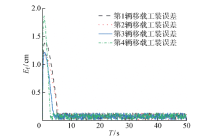
图20
跟随者误差指标随时间变化曲线
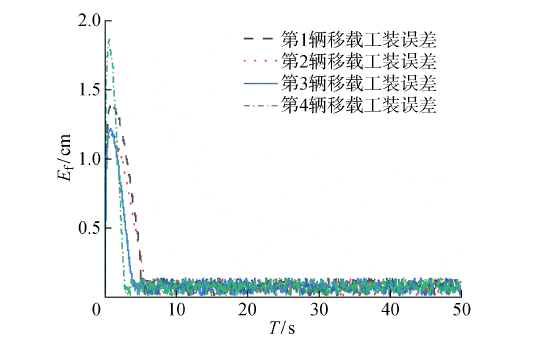
表2
跟随机器人三方向追踪时间
| 跟随机 器人编号 | 追踪时间/s | ||
|---|---|---|---|
| X方向 | Y方向 | 角度 | |
| 1 | 3.5021 | 5.5021 | 4.2345 |
| 2 | 4.2987 | 4.2987 | 6.1251 |
| 3 | 2.1342 | 2.1342 | 3.2134 |
| 4 | 3.2342 | 4.9234 | 3.4321 |
| [1] | 朱永国. 飞机大部件自动对接若干关键技术研究[D]. 南京: 南京航空航天大学, 2012. |
| ZHU Yongguo. Research on some key techniques on aircraft large part automatic joining[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012. | |
| [2] | CHEN X H, JIA Y M, MATSUNO F. Tracking control of nonholonomic mobile robots with velocity and acceleration constraints[C]// 2014 American Control Conference. Portland, USA: IEEE, 2014. |
| [3] | 陈罡, 孟静, 高晓丁, 等. 基于Backstepping方法的移动机器人路径跟踪问题研究[J]. 测控技术, 2016, 35(8): 52-56. |
| CHEN Gang, MENG Jing, GAO Xiaoding, et al. Research on path tracking problem of the mobile robot based on backstepping[J]. Measurement & Control Technology, 2016, 35(8): 52-56. | |
| [4] |
TIAN X H, LIU H L, LIU H T. Robust finite-time consensus control for multi-agent systems with disturbances and unknown velocities[J]. ISA Transactions, 2018, 80: 73-80.
doi: S0019-0578(18)30288-X pmid: 30086828 |
| [5] |
LIU J H, WANG C L, CAI X. Global finite-time event-triggered consensus for a class of second-order multi-agent systems with the power of positive odd rational number and quantized control inputs[J]. Neurocomputing, 2019, 360: 254-264.
doi: 10.1016/j.neucom.2019.05.065 URL |
| [6] |
XUE L X, WU S, XU Y Z, et al. A simulation-based multi-objective optimization design method for pump-driven electro-hydrostatic actuators[J]. Processes, 2019, 7(5): 274.
doi: 10.3390/pr7050274 URL |
| [7] |
SHAO J, XIE G, WANG L. Leader-following formation control of multiple mobile vehicles[J]. IET Control Theory & Applications, 2007, 1(2): 545-552.
doi: 10.1049/iet-cta:20050371 URL |
| [8] | CHI T, ZHANG C J, SONG Y, et al. A strategy of multi-robot formation and obstacle avoidance in unknown environment[C]//2016 IEEE International Conference on Information and Automation. Ningbo, China: IEEE, 2016: 1455-1460. |
| [9] |
REN W, BEARD R W. Decentralized scheme for spacecraft formation flying via the virtual structure approach[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(1): 73-82.
doi: 10.2514/1.9287 URL |
| [10] |
ZHOU D J, WANG Z J, SCHWAGER M. Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures[J]. IEEE Transactions on Robotics, 2018, 34(4): 916-923.
doi: 10.1109/TRO.2018.2857477 URL |
| [11] | 王树凤, 张钧鑫, 张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. |
| WANG Shufeng, ZHANG Junxin, ZHANG Junyou. Intelligent vehicles formation control based on artificial potential field and virtual leader[J]. Journal of Shanghai Jiao Tong University, 2020, 54(3): 305-311. | |
| [12] |
BENZERROUK A, ADOUANE L, MARTINET P. Stable navigation in formation for a multi-robot system based on a constrained virtual structure[J]. Robotics and Autonomous Systems, 2014, 62(12): 1806-1815.
doi: 10.1016/j.robot.2014.07.004 URL |
| [13] |
SARAVANAKUMAR S, ASOKAN T. Multipoint potential field method for path planning of autonomous underwater vehicles in 3D space[J]. Intelligent Service Robotics, 2013, 6(4): 211-224.
doi: 10.1007/s11370-013-0138-2 URL |
| [14] |
SINGH Y, SHARMA S, SUTTON R, et al. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents[J]. Ocean Engineering, 2018, 169: 187-201.
doi: 10.1016/j.oceaneng.2018.09.016 URL |
| [15] |
LAMINI C, BENHLIMA S, ELBEKRI A. Genetic algorithm based approach for autonomous mobile robot path planning[J]. Procedia Computer Science, 2018, 127: 180-189.
doi: 10.1016/j.procs.2018.01.113 URL |
| [16] | PANDEY P, SHUKLA A, TIWARI R. Three-dimensional path planning for unmanned aerial vehicles using glowworm swarm optimization algorithm[J]. International Journal of System Assurance Engineering and Management, 2018, 9(4): 836-852. |
| [17] | 赵国旗, 杨明, 王冰, 等. 基于智能终端的移动机器人室内外无缝定位方法[J]. 上海交通大学学报, 2018, 52(1): 13-19. |
| ZHAO Guoqi, YANG Ming, WANG Bing, et al. Indoor and outdoor seamless positioning method of mobile robot based on intelligent terminal[J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 13-19. | |
| [18] |
LI T, SUN S, SATTAR T P. Adapting sample size in particle filters through KLD-resampling[J]. Electronics Letters, 2013, 49(12): 740-742.
doi: 10.1049/el.2013.0233 URL |
| [19] |
ANILY S, FEDERGRUEN A. Simulated annealing methods with general acceptance probabilities[J]. Journal of applied probability, 1987, 24(3): 657-667.
doi: 10.2307/3214097 URL |
| [20] | COULTER R C. Implementation of the pure pursuit path tracking algorithm[R]. Pittsburgh, USA: Carnegie-Mellon UNIV Pittsburgh PA Robotics INST, 1992. |
| [1] | 马晖皓, 田锋, 吕津波, 等. 自由降落式救生艇在圆筒型FPSO上应用的可行性研究[J]. 海洋工程装备与技术, 2025, 12(4): 72-76. |
| [2] | 周添龙, 姚方競, 饶卫雄. 部分已知状态空间模型下的目标状态估计算法[J]. 空天防御, 2025, 8(3): 111-122. |
| [3] | 唐荻音, 王预夫, 郑文健, 黄旭聪, 邢雅兰. 基于等效模型的锂离子电池荷电状态估计算法综述[J]. 空天防御, 2024, 7(6): 104-111. |
| [4] | 焦聪, 许兆胜, 李威, 田道贵, 陈炼, 赵征. 针对分布式集群的空中诱骗对抗方法[J]. 空天防御, 2024, 7(4): 114-120. |
| [5] | 臧红岩, 谢晓龙, 徐亚周, 陶业, 高长生. 基于循环神经网络的高超声速机动目标状态估计算法[J]. 空天防御, 2024, 7(4): 88-98. |
| [6] | 穆建彬,杨海丽,何德峰. 基于控制屏障函数的自主移动机器人安全编队分布式模型预测控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [7] | 王先至, 李国飞, 常亚南. 基于分布式扩张状态观测器的多飞行器编队控制[J]. 上海交通大学学报, 2024, 58(11): 1798-1804. |
| [8] | 曹凯, 陈阳泉, 李康, 陈超波, 阎坤, 刘伟超. 基于动态密度引导的多机器人编队队形变换方法[J]. 上海交通大学学报, 2024, 58(11): 1783-1797. |
| [9] | 徐晨辉, 俞芳慧, 何德峰. 基于扰动块的柔性臂分布式滚动时域估计[J]. 上海交通大学学报, 2022, 56(7): 868-876. |
| [10] | 卢地华, 陈自强. 基于双充电状态的锂离子电池健康状态估计[J]. 上海交通大学学报, 2022, 56(3): 342-352. |
| [11] | 杜宇石, 琚长江, 杨根科. 基于非线性观测器的超级电容器荷电状态在线估计[J]. 上海交通大学学报, 2022, 56(12): 1630-1637. |
| [12] | 张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47. |
| [13] | 吴光辉, 方东洋, 陈意芬, 李瑞, 邵翔. 基于浸入与不变流形估计器的滑模制导律研究[J]. 空天防御, 2021, 4(1): 91-96. |
| [14] | 刘晨, 谢宝娣, 董国宝, 霍达, 段雨昕, 夏川. 基于自适应积分滑模的无人机编队控制器设计[J]. 空天防御, 2021, 4(1): 65-70. |
| [15] | 王树凤,张钧鑫,张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||