上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (11): 1389-1399.doi: 10.16183/j.cnki.jsjtu.2022.235
所属专题: 《上海交通大学学报》2023年“船舶海洋与建筑工程”专题
• 船舶海洋与建筑工程 • 下一篇
张晨宇, 孟帅( )
)
收稿日期:2022-06-21
修回日期:2022-10-06
接受日期:2022-10-18
出版日期:2023-11-28
发布日期:2023-12-01
通讯作者:
孟 帅,副教授,博士生导师;E-mail:作者简介:张晨宇(1998-),硕士生,从事海洋立管再入井控制研究.
基金资助:
ZHANG Chenyu, MENG Shuai()
Received:2022-06-21
Revised:2022-10-06
Accepted:2022-10-18
Online:2023-11-28
Published:2023-12-01
摘要:
海洋立管在钻井作业时一旦遇到恶劣天气须将底端总成和防喷器断开,待天气好转需重新连接称为再入井作业.深海区钻井立管发生断开的概率大幅增加,为适应多变的海况需要快速完成再入井过程.提出基于模型预测控制(MPC)再入井控制系统;基于哈密顿原理建立悬挂立管分析模型,设计优化函数及约束项,构建非线性扰动观测器实现洋流力模型误差和洋流速度扰动补偿,与传统比例-积分-微分(PID)控制作业进行仿真比较.MPC系统作用下,母船迅速响应,立管能快速稳定完成再入井作业,较好处理洋流力模型误差,并在洋流速度扰动下具有良好鲁棒性.立管由于长径比大幅增加导致柔性显著增强,在母船及海洋环境力激励下,悬挂立管在快速再入井过程中高阶模态可能被激发.
中图分类号:
张晨宇, 孟帅. 基于模型预测控制的深海钻井立管再入井仿真分析[J]. 上海交通大学学报, 2023, 57(11): 1389-1399.
ZHANG Chenyu, MENG Shuai. Simulation Study of Reentry Dynamics of a Deep-Water Drilling Riser System Based on Model Predictive Control[J]. Journal of Shanghai Jiao Tong University, 2023, 57(11): 1389-1399.

图1
深海钻井立管硬悬挂模式示意图
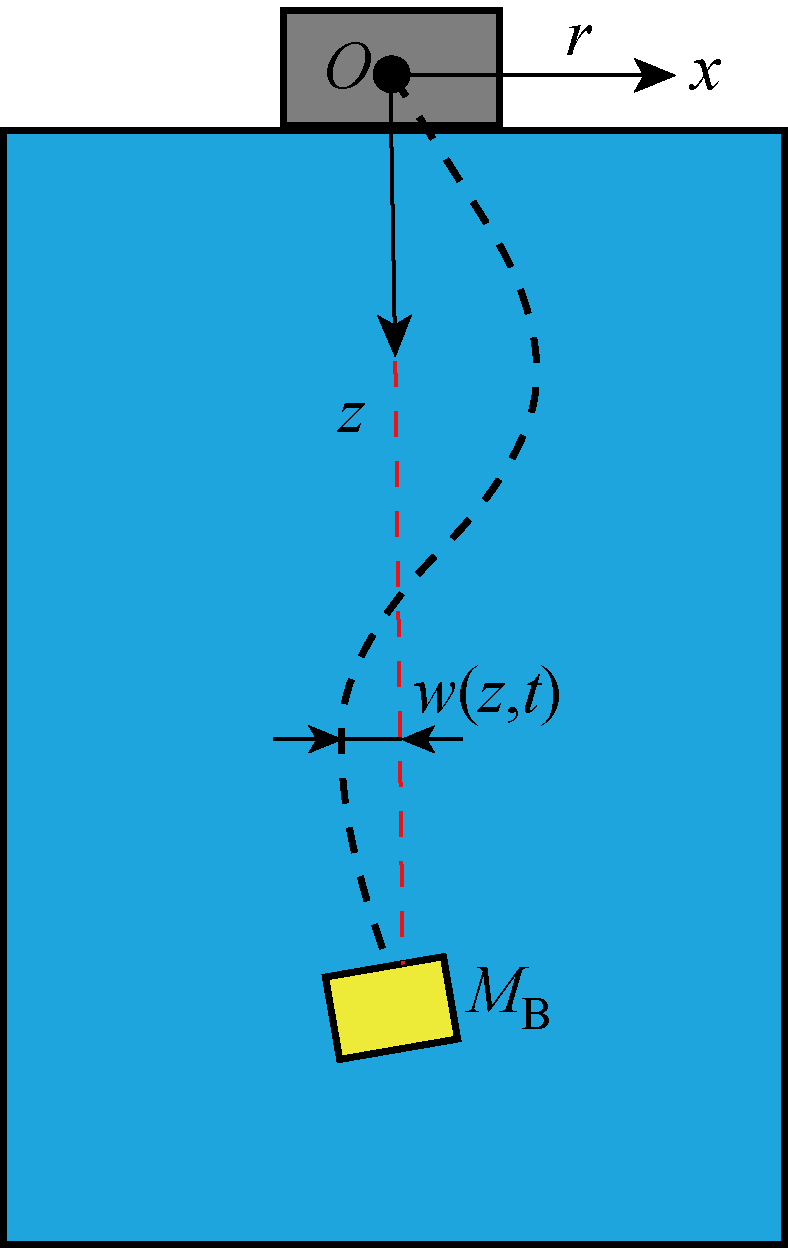
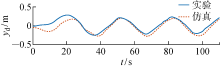
图2
立管底端防喷器仿真结果与试验数据对比
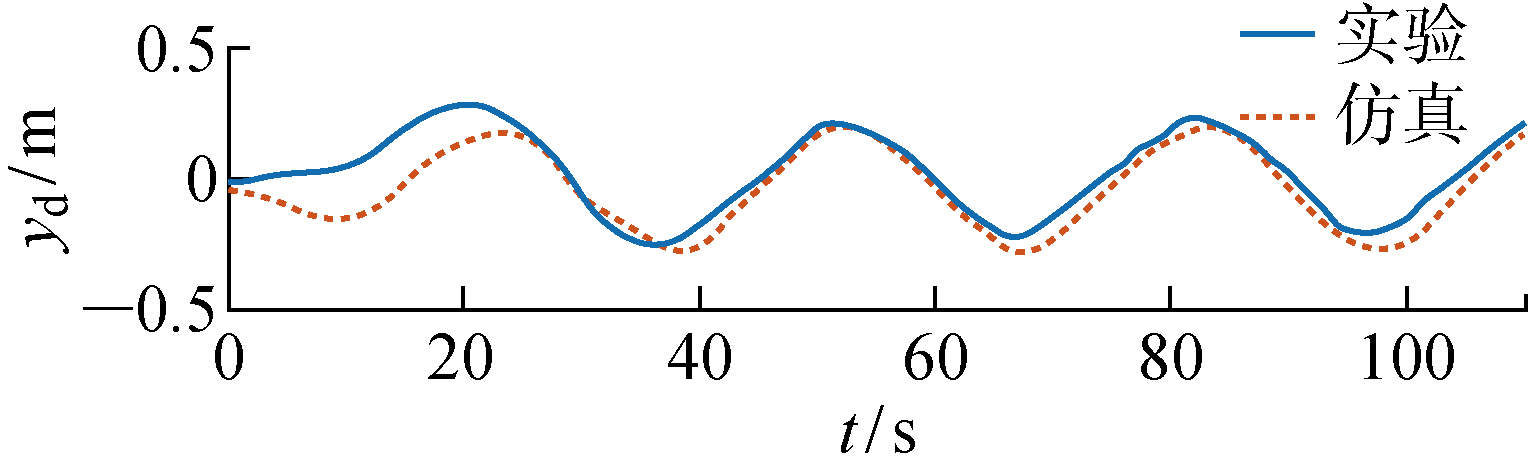

图3
基于 MPC的海洋立管再入井作业控制系统原理图
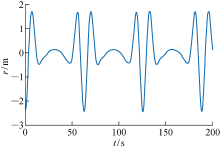
图4
波浪谱下船舶纵荡响应
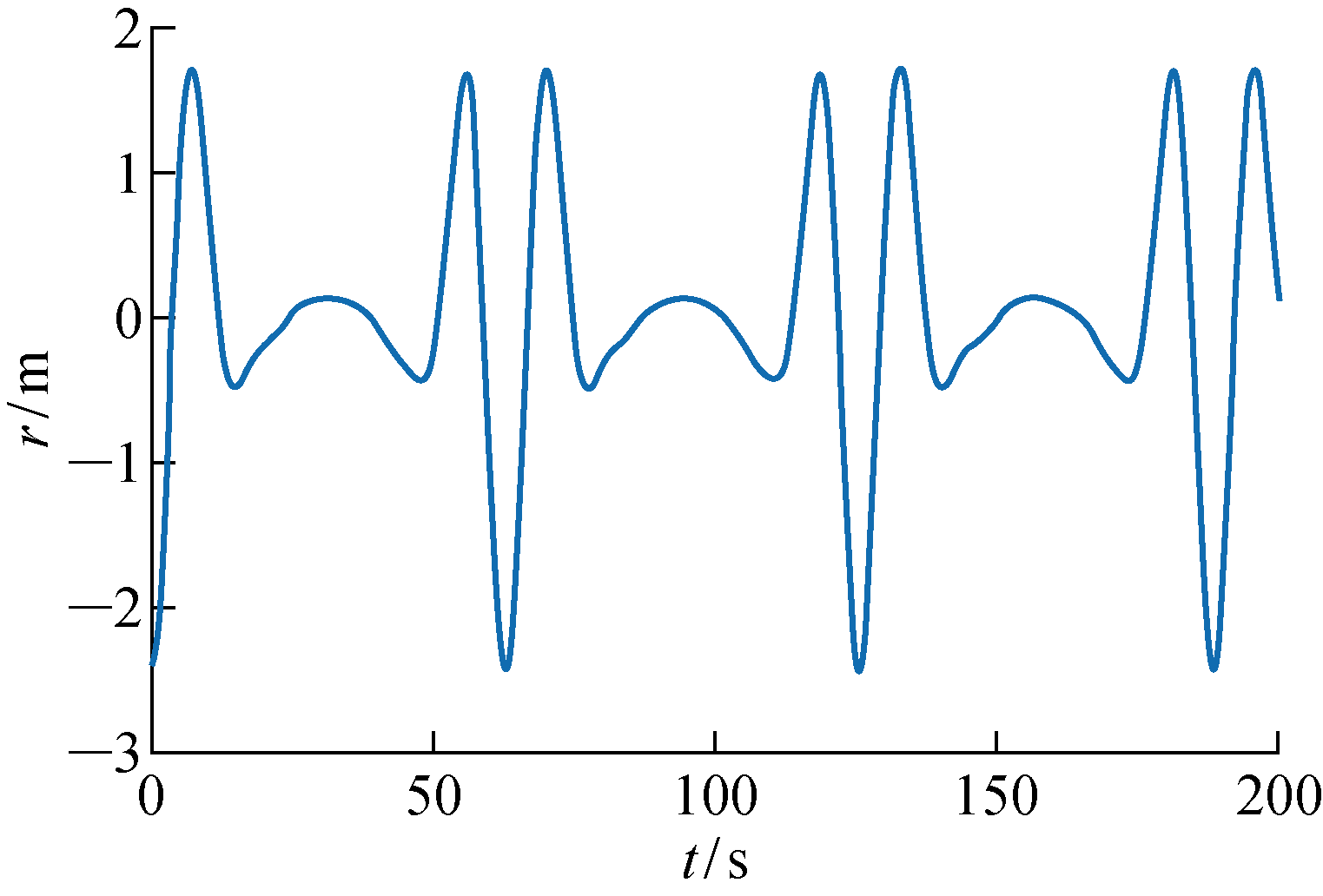
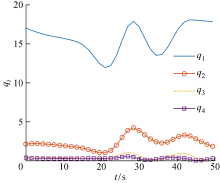
图5
悬挂立管前4阶模态时间坐标响应曲线
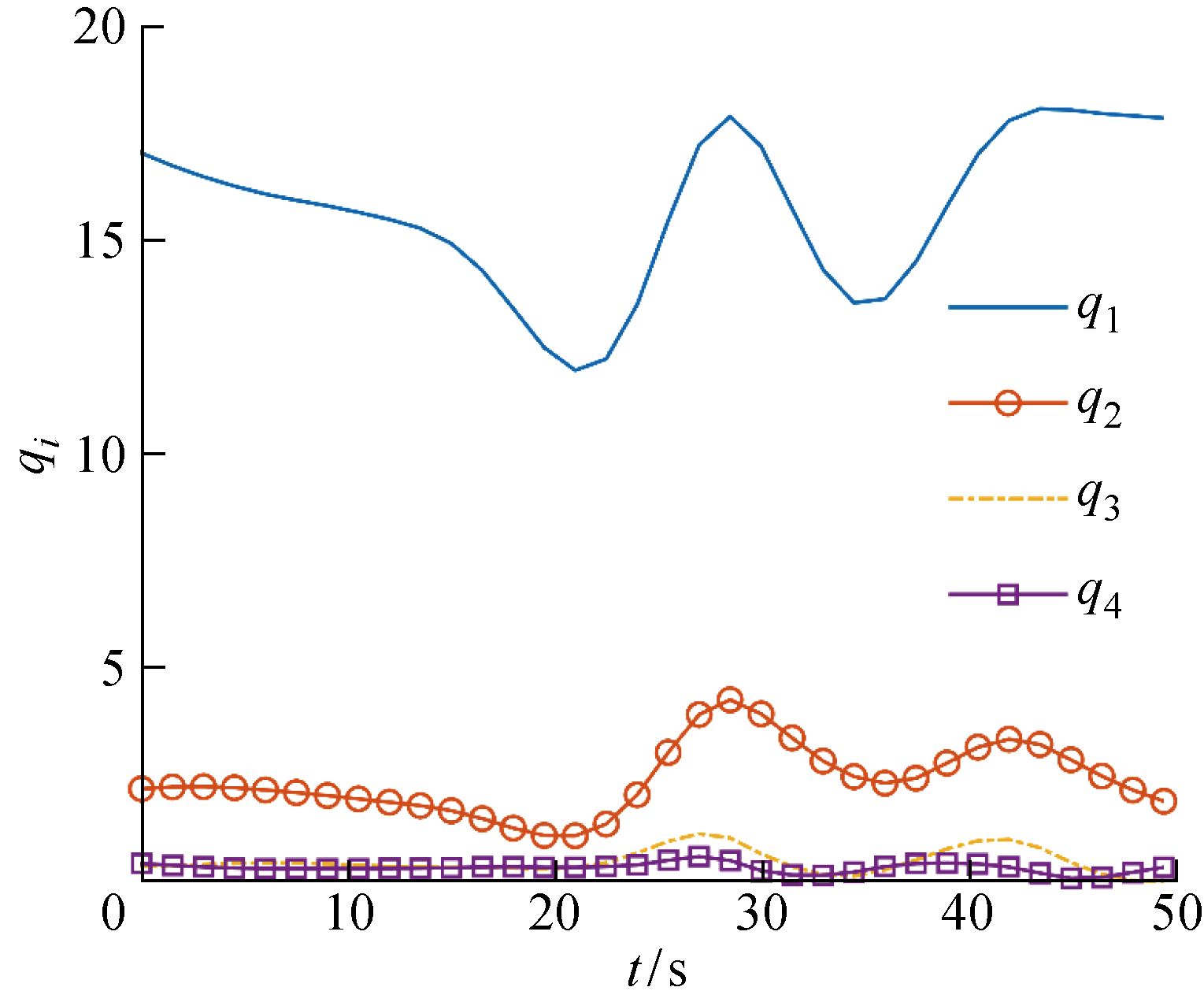

图6
母船及立管底端总成位置响应曲线
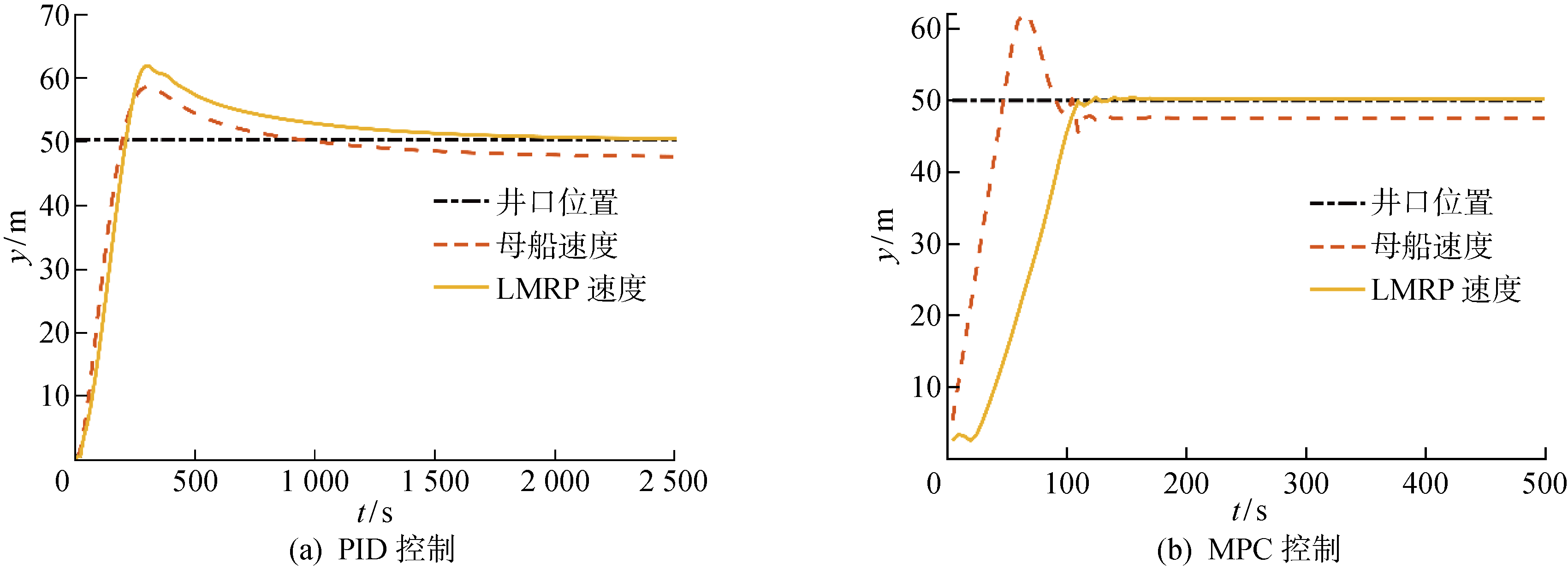

图7
母船及立管底端总成速度响应曲线
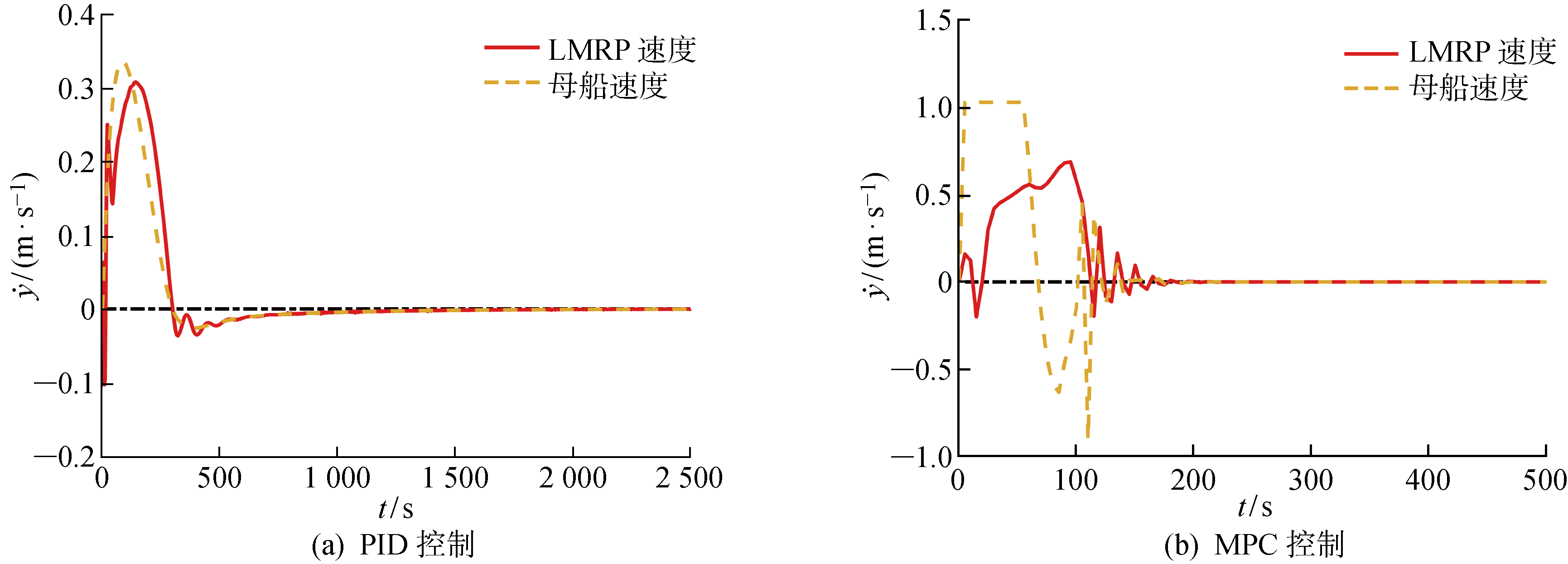
图8
立管顶端与底端总成之间的横向偏移
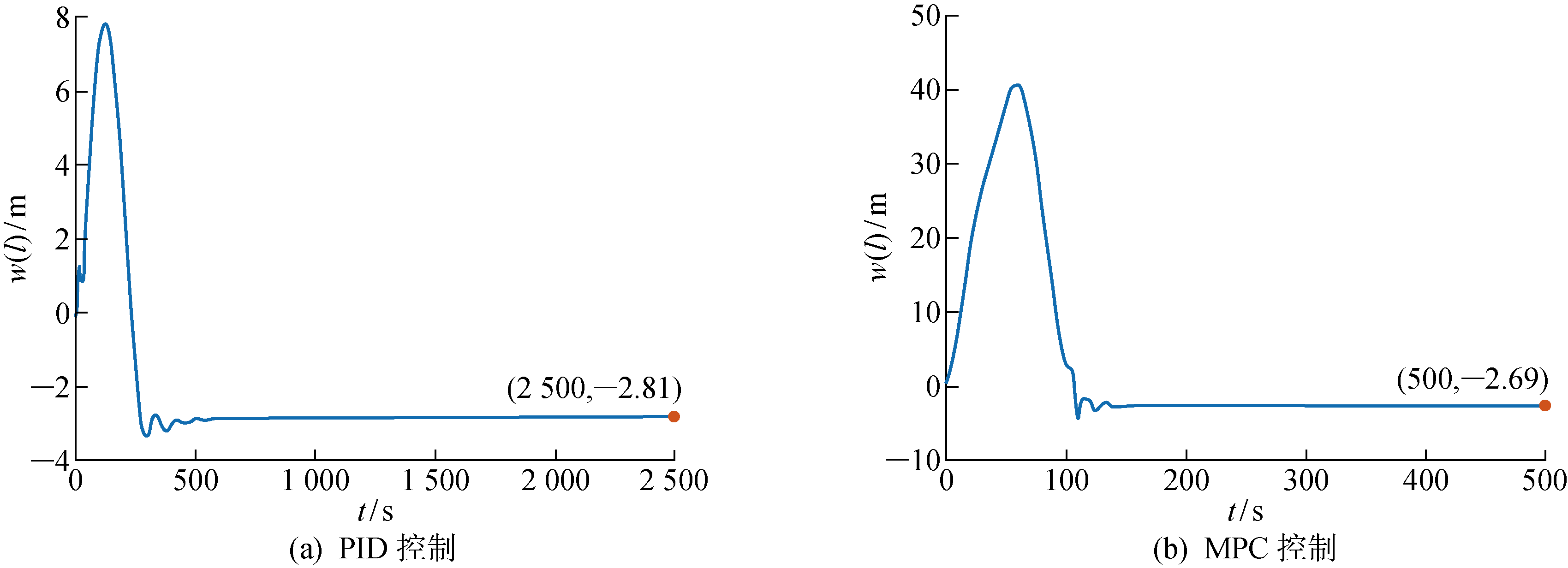

图9
再入井过程悬挂立管形变曲线

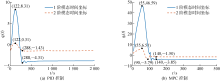
图10
悬挂立管前两阶模态时间坐标响应曲线

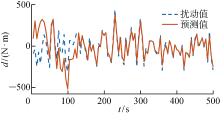
图11
洋流力附加扰动时间历程曲线
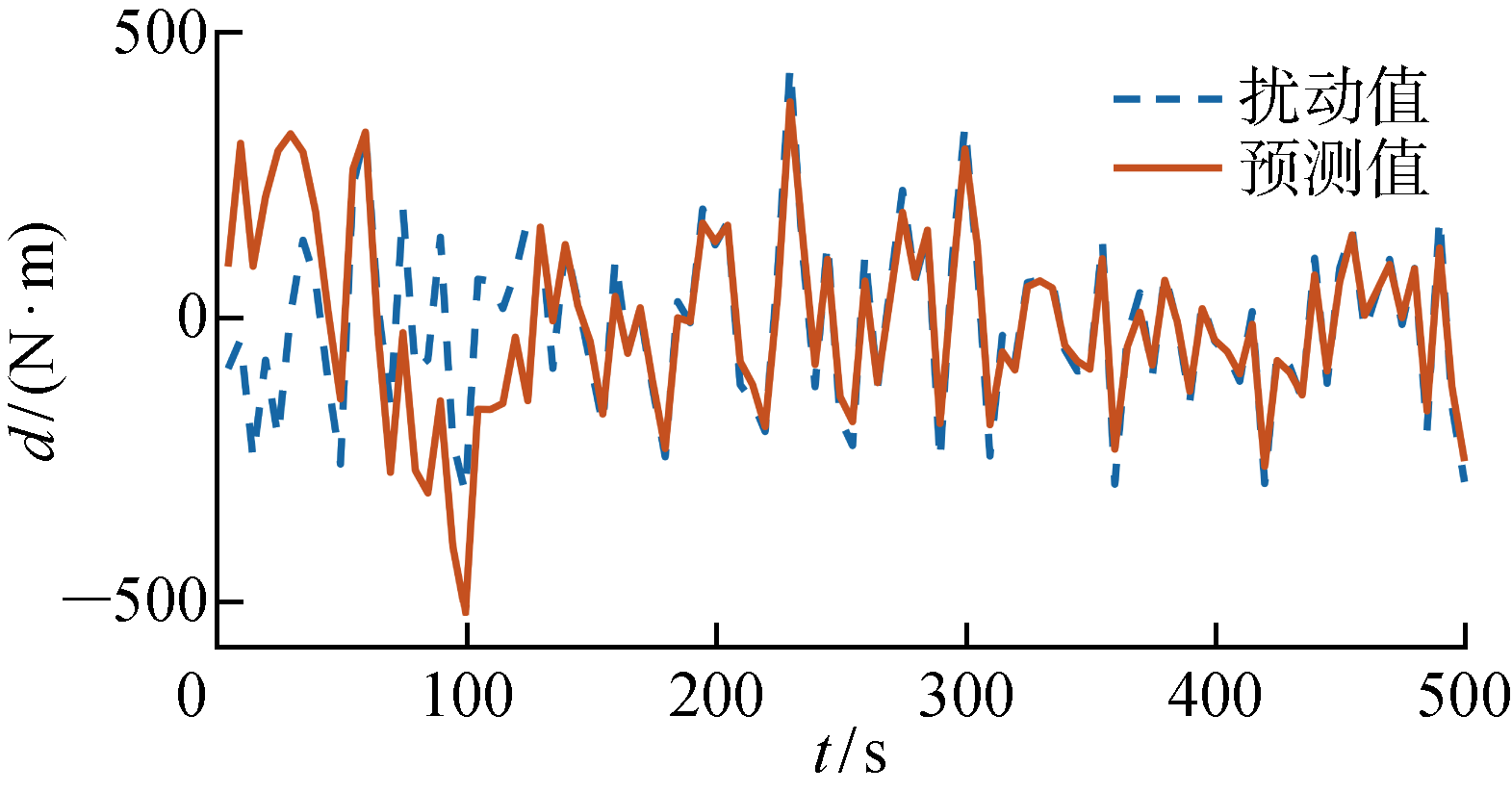
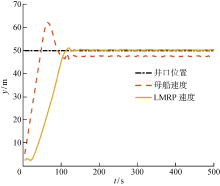
图12
洋流力扰动下母船及LMRP位置响应曲线

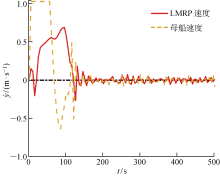
图13
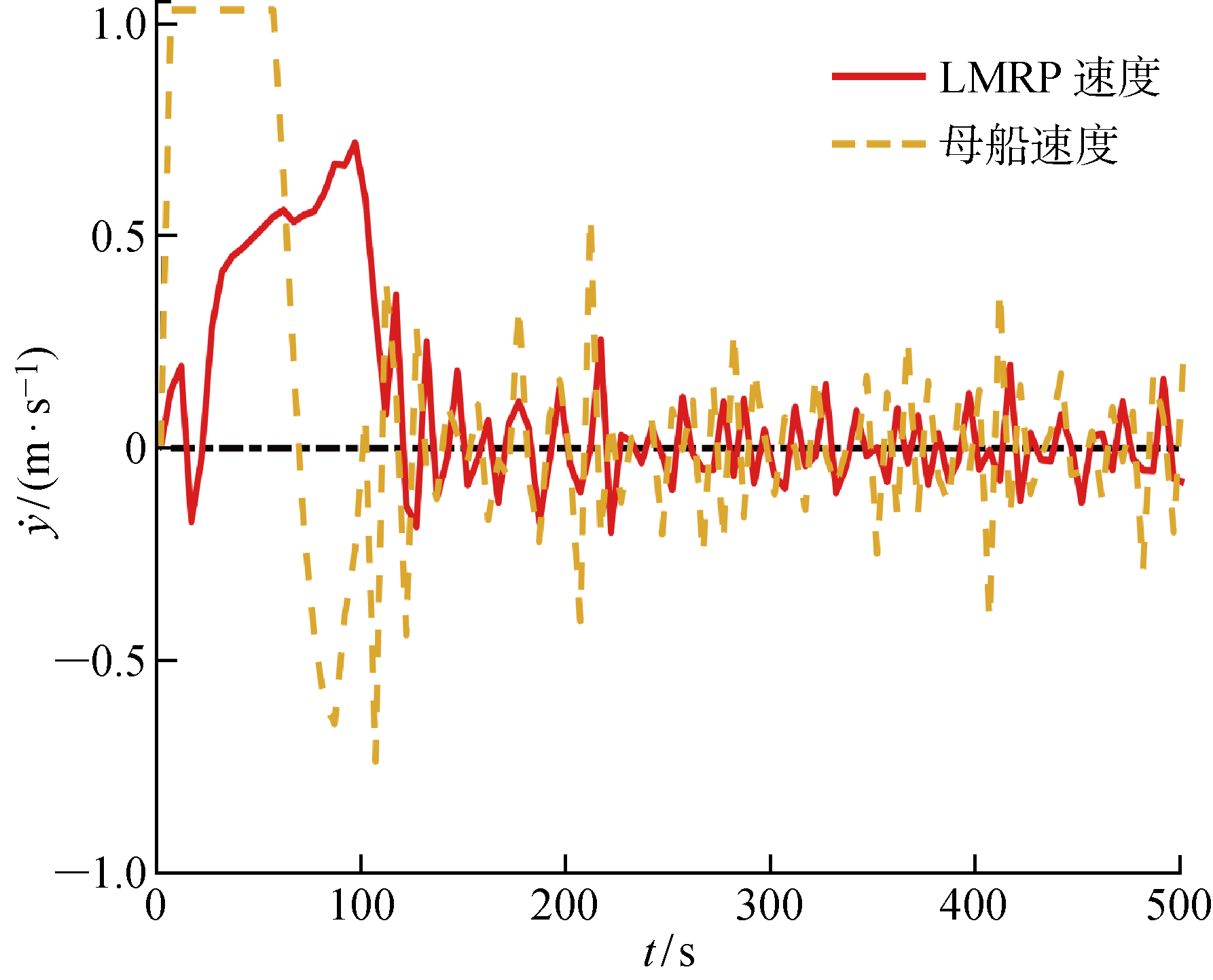
洋流力扰动下母船及LMRP速度响应曲线
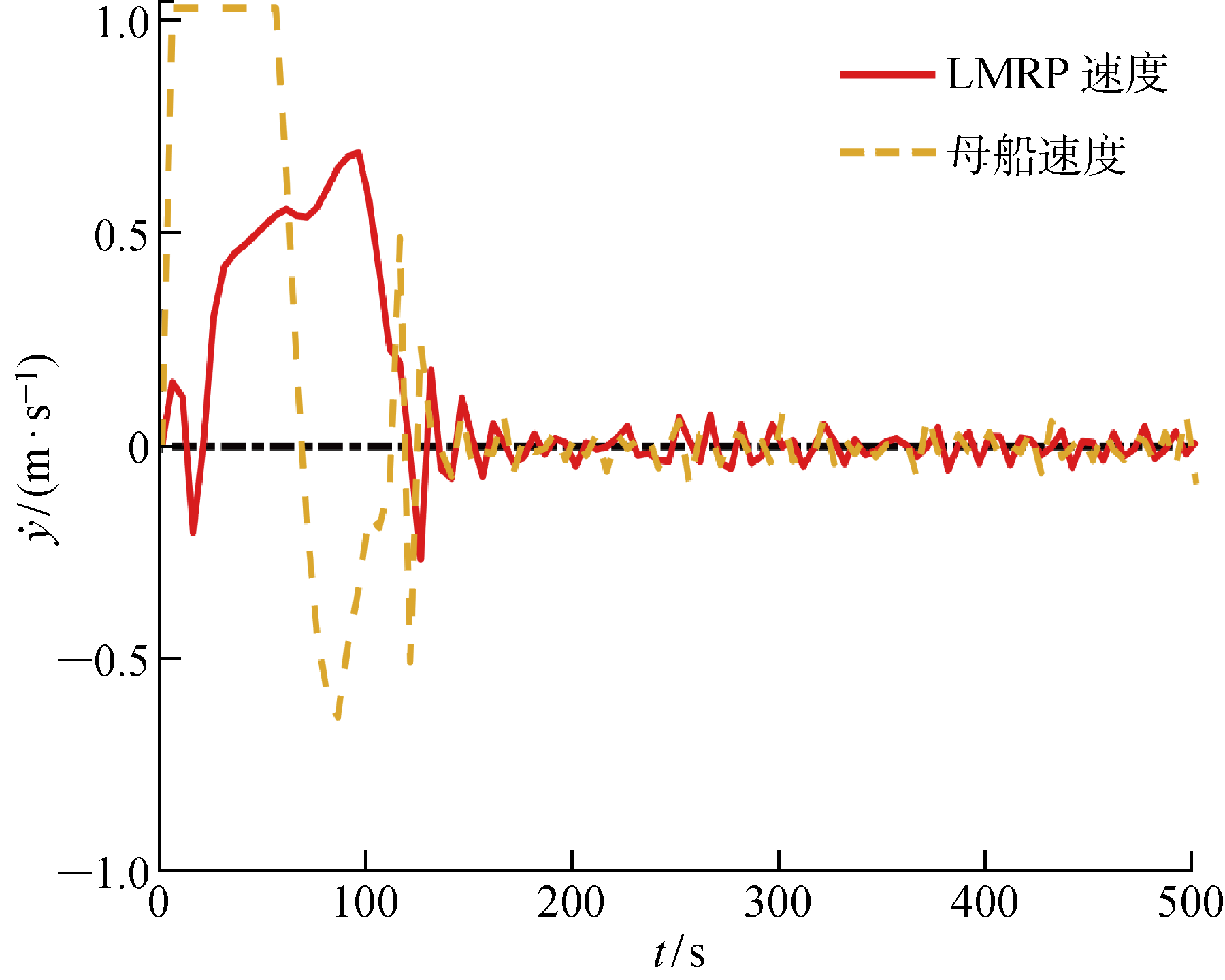
图14
洋流速度时间历程曲线
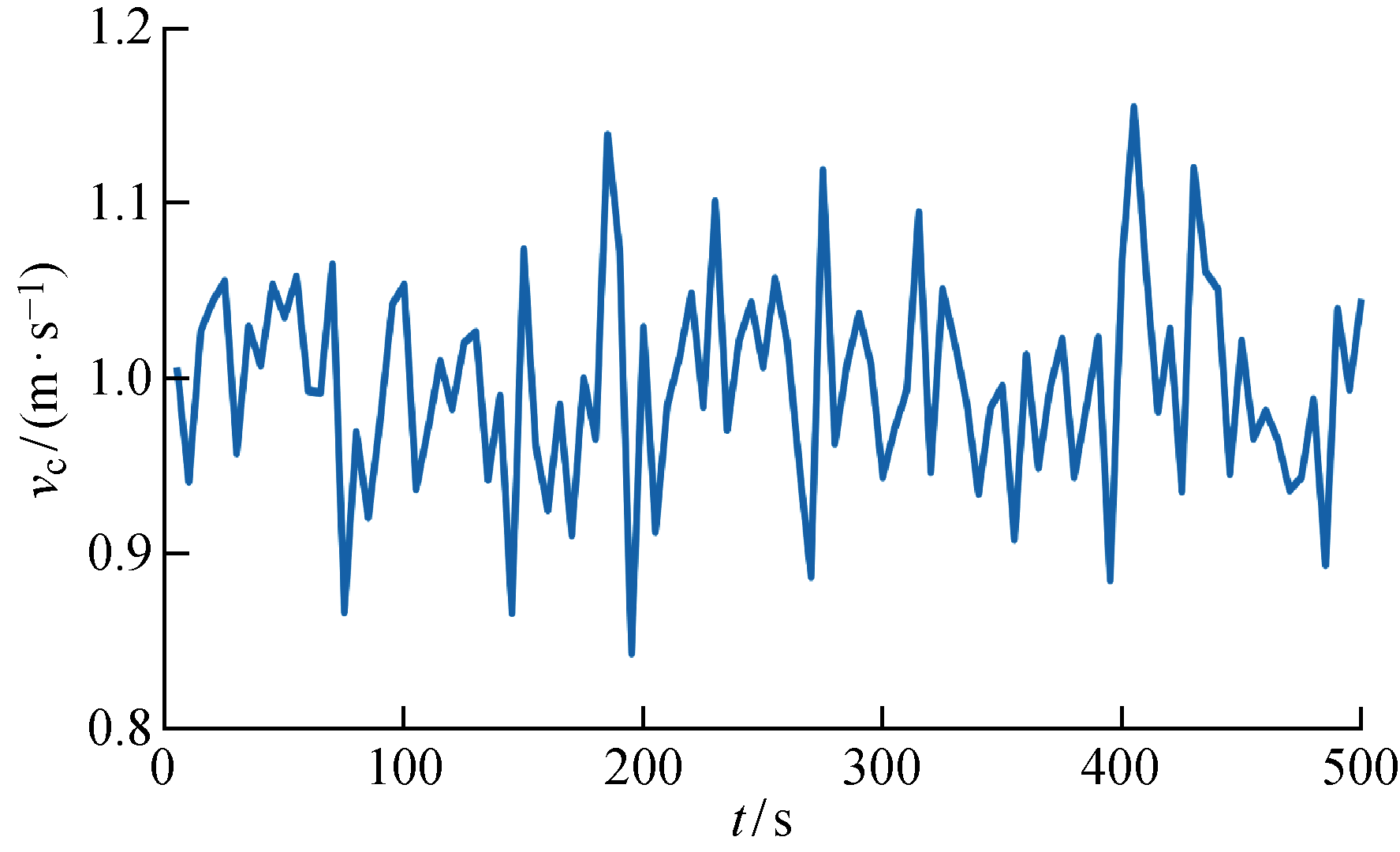
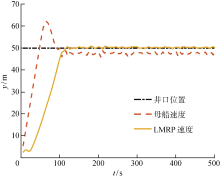
图15
流速扰动下母船及LMRP位置响应曲线
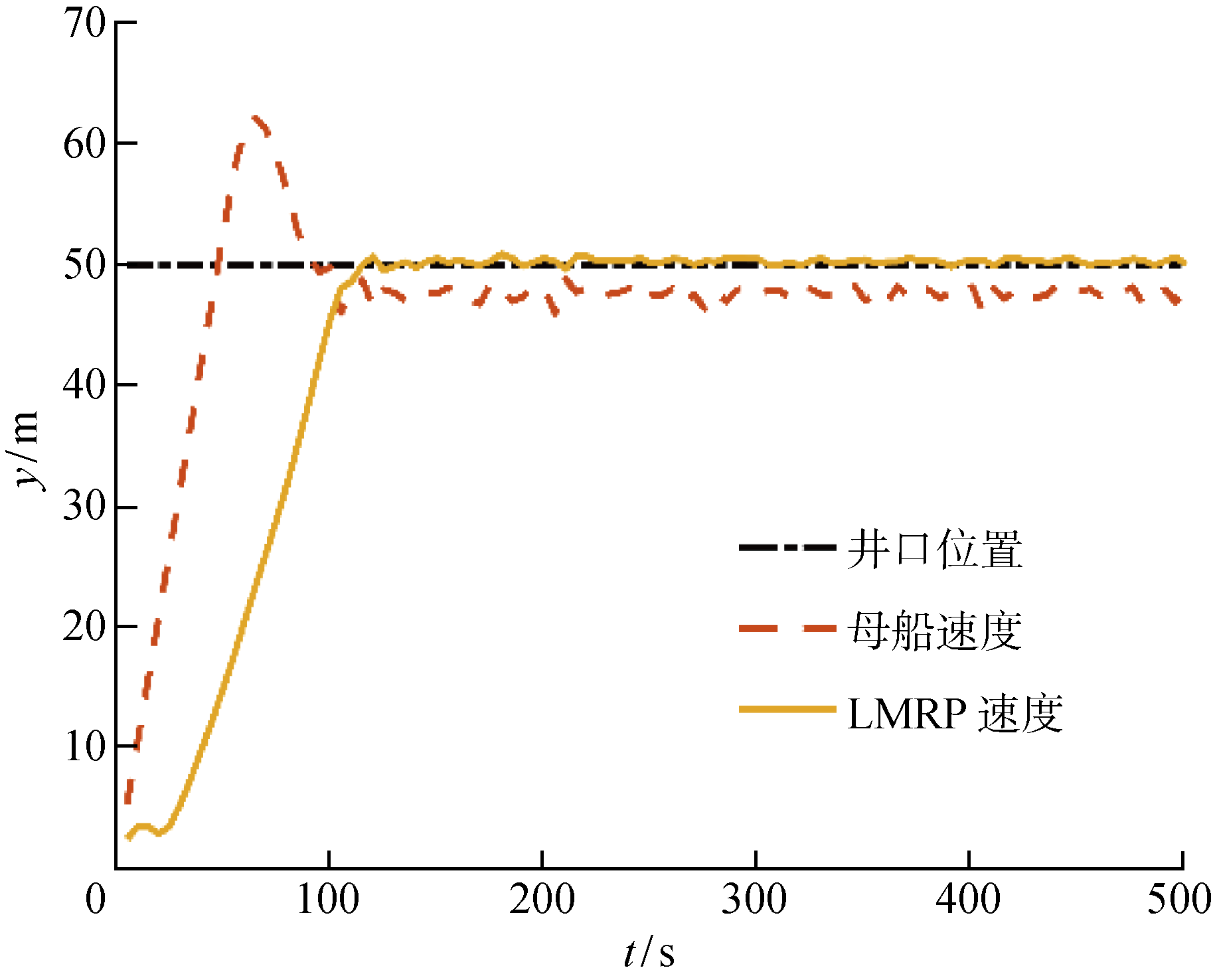
图16
流速扰动下母船及LMRP速度响应曲线
| [1] | MURAI M, YAMAMOTO M. An experimental analysis of the internal flow effect on marine risers[C]// Proceedings of the Internal Conference on Marine Technology. Dhaka, Bangladesh: MARTEC, 2010: 159-165. |
| [2] | 王宗义, 肖坤, 庞永杰, 等. 船舶动力定位的数学模型和滤波方法[J]. 哈尔滨工程大学学报, 2002, (4): 24-28. |
| WANG Zongyi, XIAO Kun, PANG Yongjie, et al. Mathematical models and filtering methods for dynamic ship positioning[J]. Journal of Harbin Engineering University, 2002(4): 24-28. | |
| [3] | SUZUKI H, YOSHIDA K, SHIDA S, et al. Active control of riser deformation and vessel motion for automatic entry/reentry system[C]// Proceedings of 4th International Offshore and Polar Engineering Conference. Osaka, Japan: ISOPE, 1994: 216-223. |
| [4] | SUZUKI H, TAO Q, WATANABE K. Learning tracking controllers under unknown disturbances for the installation of rigid and flexible structures[J]. Journal of Marine Science & Technology, 1999, 4(4): 187-199. |
| [5] | TAKAYUKI I, KAZUHISA O, KAJIWARA H, et al. On vibration control of flexible pipe in ocean drilling system[C]// Proceedings of the Sixteenth International Offshore and Polar Engineering Conference. San Francisco, USA: ISOPE, 2006: 26-30. |
| [6] | KOTERAYAMA W, NAKAMURA M, KAJIWARA H, et al. Development of a training simulator for dynamic reentry operations of a riser pipe hanged off[C]// Proceedings of the Eighteenth International Offshore and Polar Engineering Conference. Vancouver, Canada: ISOPE, 2008: 67-70. |
| [7] | KOTERAYAMA W, KARJIWARA H, NAKAMURA M, et al. Model experiments of reentry control based on riser pipe dynamics[C]// The Eighth ISOPE Pacific/Asia Offshore Mechanics Symposium. Bangkok, Thailand: ISOPE, 2008: 8-12. |
| [8] | KARJIWARA H, NORIDOMI K. Reentry control system design for a riser pipe experimental model under steady current[C]2009 ICCAS-SICE. Fukuoka, Japan: IEEE, 2009: 3896-3901. |
| [9] | HU Y L, YAO B H, ZHENG Z, et al. Research on marine riser in different installations stages of subsea production tree[C]// Shanghai, China. China: IEEE, 2016: 920-922. |
| [10] |
WANG S W, XU X S, YAO B H, et al. A finite difference approximation for dynamic calculation of vertical free hanging slender riser in re-entry application[J]. China Ocean Engineering, 2012, 26(4): 637-652.
doi: 10.1007/s13344-012-0048-7 URL |
| [11] | 王盛炜, 徐雪松, 姚宝恒, 等. 针对立管重入井过程中等路径段加速度的改进型蚁群优化算法[J]. 上海交通大学学报, 2013, 47(10): 1585-1590. |
| WANG Shengwei, XU Xuesong, YAO Baoheng, et al. Improved ant colony optimization for accelerations of equal-length paths of riser re-entry[J]. Journal of Shanghai Jiao Tong University, 2013, 47(10): 1585-1590. | |
| [12] |
WANG S W, XU X S, LU X. Movement optimization of freely-hanging deepwater risers in reentry[J]. Ocean Engineering, 2016, 116: 32-41.
doi: 10.1016/j.oceaneng.2016.02.029 URL |
| [13] | TRIANTAFYLLOU M S. Cable mechanics for moored floating systems[C]// Proceedings of the Seventh International Conference on the Behavior of Offshore Structures. Massachusetts, USA: Pergamon, 1994: 57-79. |
| [14] |
CHATJIGEORGIOU I K. A finite differences formulation for the linear and nonlinear dynamics of 2D catenary risers[J]. Ocean Engineering, 2008, 35(7): 616-636.
doi: 10.1016/j.oceaneng.2008.01.006 URL |
| [15] |
HU Y L, CAO J J, YAO B H, et al. Dynamic behaviors of a marine riser with variable length during the installation of a subsea production tree[J]. Journal of Marine Science and Technology, 2017, 23(3): 1-11.
doi: 10.1007/s00773-017-0462-x URL |
| [16] | 胡永利. 深海钻井立管重入井作业运动特性及其优化研究[D]. 上海: 上海交通大学, 2018. |
| HU Yongli, Study of properties and optimization of deep-sea drilling riser in reentry[D]. Shanghai: Shanghai Jiao Tong University, 2018. | |
| [17] | HU Y L, YAO B H, LIAN L. Analysis of drilling riser in re-entry operation under complex currents[J]. Journal of Ship Mechanics, 2019, 23(12): 1528-1540. |
| [18] | YAMAMOTO M, MOROOKA C K, UENO S. Dynamic behavior of a semi-submersible platform coupled with drilling riser during re-entry operation in ultra-deep water[C]// Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering. San Diego, California, USA: ASME, 2007: 239-248. |
| [19] | YAMAMOTO M. An automatic approaching control for the petroleum well re-entry operation in ultra-deep water[C]// Proceedings of the 8th IFAC International Conference on Maneuvering and Control of Marine Craft. Guarujá, Brazil: IFAC, 2009: 388-393, |
| [20] |
YAMAMOTO M, MOROOKA C K. Feedback control system for blow-out preventer positioning[J]. Applied Ocean Research, 2019, 82: 362-369.
doi: 10.1016/j.apor.2018.11.013 |
| [21] | 毛良杰, 付燈煌, 曾松. 正常连接与悬挂撤离工况下深水钻井隔水管动力特性与安全分析[J]. 船舶力学, 2022, 26(2): 250-263. |
| MAO Liangjie, FU Denghuang, ZENG Song. Dynamic characteristics and safety analysis of deep water drilling riser under normal connected condition and hang-off evacuation condition[J]. Journal of Ship Mechanics, 2022, 26(2): 250-263. | |
| [22] | FOSSEN T I. Guidance and control of ocean vehicles[M]. Chichester, England: John Wiley & Sons, 1994. |
| [23] |
SØRENSEN A J, SAGATUN S I, FOSSEN T I. Design of a dynamic positioning system using model-based control[J]. Control Engineering Practice, 1996, 4(3): 359-368.
doi: 10.1016/0967-0661(96)00013-5 URL |
| [1] | 李诗杰, 刘泰序, 刘佳仑, 董智霖, 徐诚祺. 基于GRU-MPC的双全回转推进拖轮轨迹跟踪控制[J]. 上海交通大学学报, 2026, 60(3): 418-426. |
| [2] | . 基于输入映射及事件触发自适应策略的刚柔混合机械臂模型预测控制[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 36-47. |
| [3] | 乔文超, 聂伟民, 杜选民, 刘本奇, 叶天明, 杨天霖. 用于圆周合成孔径声呐成像的无人船圆周运动精准控制方法[J]. 上海交通大学学报, 2026, 60(1): 154-162. |
| [4] | . 基于模型预测控制的欠驱动USV自主航行模型[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1255-1264. |
| [5] | 崔思远, 李浩, 范翔宇, 倪磊, 侯佳航. 基于AMDE-DMPC算法的多无人机协同目标搜索方法[J]. 空天防御, 2025, 8(6): 35-44. |
| [6] | 曹永吉, 张江丰, 王天宇, 郑可轲, 吴秋伟. 基于分布式模型预测控制的自适应二次调频策略[J]. 上海交通大学学报, 2025, 59(3): 333-341. |
| [7] | . 基于数据驱动的永磁同步电机控制系统模型预测控制方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 270-279. |
| [8] | 刘月笙, 贺宁, 贺利乐, 张译文, 习坤, 张梦芮. 基于机器学习的移动机器人路径跟踪MPC控制器参数自整定[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(6): 1028-1036. |
| [9] | 邱革非, 冯泽华, 沈赋, 何超, 何虹辉, 刘铠铭. 考虑车网互动的园区电网动态双层能量管理策略[J]. 上海交通大学学报, 2024, 58(6): 916-925. |
| [10] | 张啸天1,何德峰1,廖飞2. 复杂环境及约束下舰载机自动着舰迭代模型预测控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 712-724. |
| [11] | 穆建彬,杨海丽,何德峰. 基于控制屏障函数的自主移动机器人安全编队分布式模型预测控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [12] | 蔡振华, 黎灿兵, 阳同光, 魏娟, 葛睿, 李立雄. 考虑动态频率惯量特性的储能电池参与电网一次调频控制[J]. 上海交通大学学报, 2024, 58(12): 1946-1956. |
| [13] | 王向磊, 刘秀全, 刘兆伟, 畅元江, 陈国明. 系统不确定的深海钻井立管解脱反冲智能控制[J]. 上海交通大学学报, 2024, 58(11): 1698-1706. |
| [14] | 何宇, 欧阳子路, 邹璐, 陈伟民, 邹早建. 基于矢量场制导法和模型预测控制的船舶路径跟踪与避碰[J]. 上海交通大学学报, 2024, 58(11): 1644-1653. |
| [15] | 刘传斌, 矫文书, 吴秋伟, 陈健, 周前. 基于模型预测控制的风储联合电场参与电网二次调频策略[J]. 上海交通大学学报, 2024, 58(1): 91-101. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||