上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (7): 850-857.doi: 10.16183/j.cnki.jsjtu.2021.447
所属专题: 《上海交通大学学报》2022年“电子信息与电气工程”专题
程斌( ), 黄斌, 李得睿
), 黄斌, 李得睿
收稿日期:2021-11-03
出版日期:2022-07-28
发布日期:2022-08-16
作者简介:程斌(1979-),男,江西省上饶市人,教授,博士生导师,主要从事桥梁智能监测研究.电话(Tel.):021-34204068;E-mail: 基金资助:
CHENG Bin(), HUANG Bin, LI Derui
Received:2021-11-03
Online:2022-07-28
Published:2022-08-16
摘要:
针对现有照相机图像标定方法存在的依赖外部图像特征、要求照相机特殊位姿、需要标定物、操作复杂等不足之处,提出了一种基于平行激光测距的实时自标定方法.该方法在图像拍摄过程中,利用高精度激光测距仪连续测量以获得被测物表面的实时位置信息.在此基础上,对物面方程进行求解,选取物面和像面上至少4组对应点的二维坐标,求解得到表示两个平面之间变换关系的单应性矩阵,从而简便快速地完成标定.采用自主研制的标定装置,开展了不同场景下的图像自标定精度测试.结果表明,图像中各线段长度的测量误差介于-0.49%~0.15%,平均误差仅为-0.14%,验证了所提平行激光测距自标定方法具有很高的准确性和稳定性.对标定误差来源进行进一步分析,得到了激光测距误差、激光倾角误差、偏置误差等因素的定量影响规律,并给出了相应的误差规避方法,为该自标定方法在图像测量领域中的应用提供参考.
中图分类号:
程斌, 黄斌, 李得睿. 基于平行激光测距的图像自标定方法[J]. 上海交通大学学报, 2022, 56(7): 850-857.
CHENG Bin, HUANG Bin, LI Derui. An Image Self-Calibration Method Based on Parallel Laser Ranging[J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 850-857.
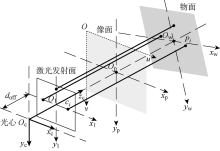
图1
物面方程求解示意图
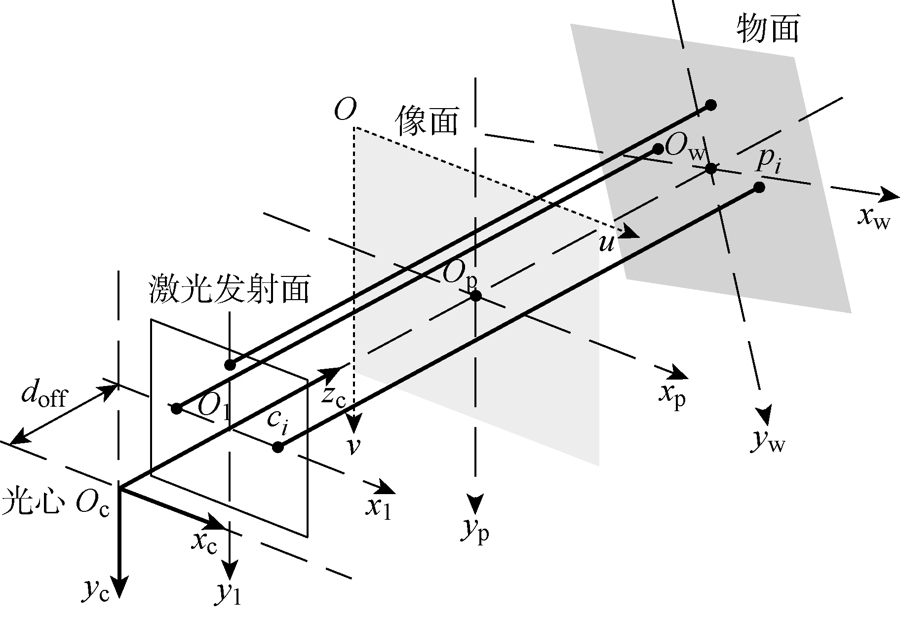
图2
单应性矩阵求解示意图
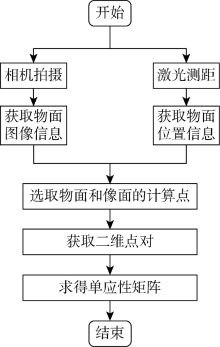
图3
自标定流程图
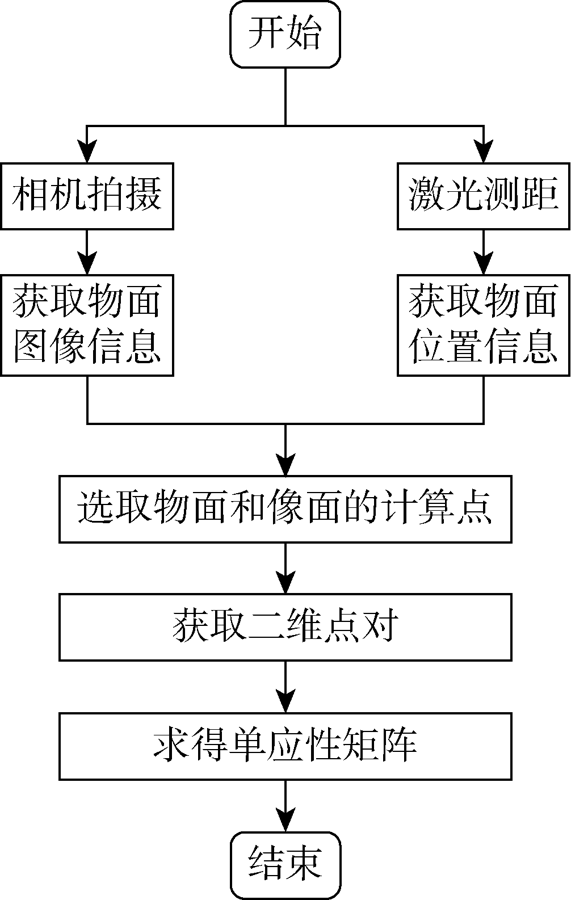
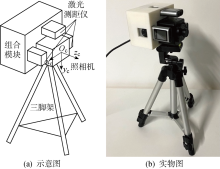
图4
激光测距自标定装置
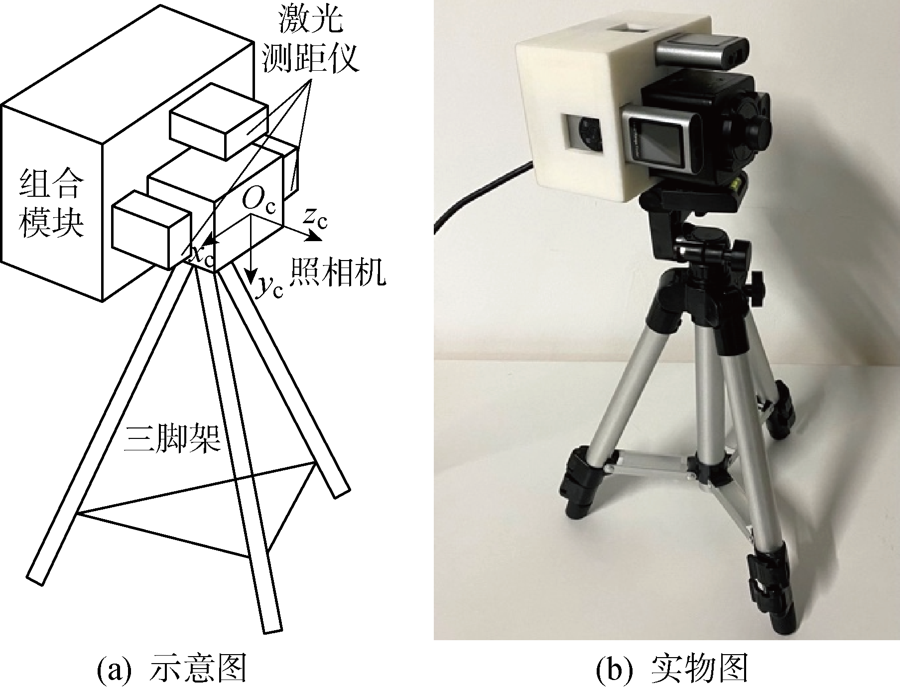
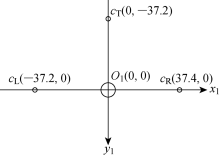
图5
激光发射点位置(mm)
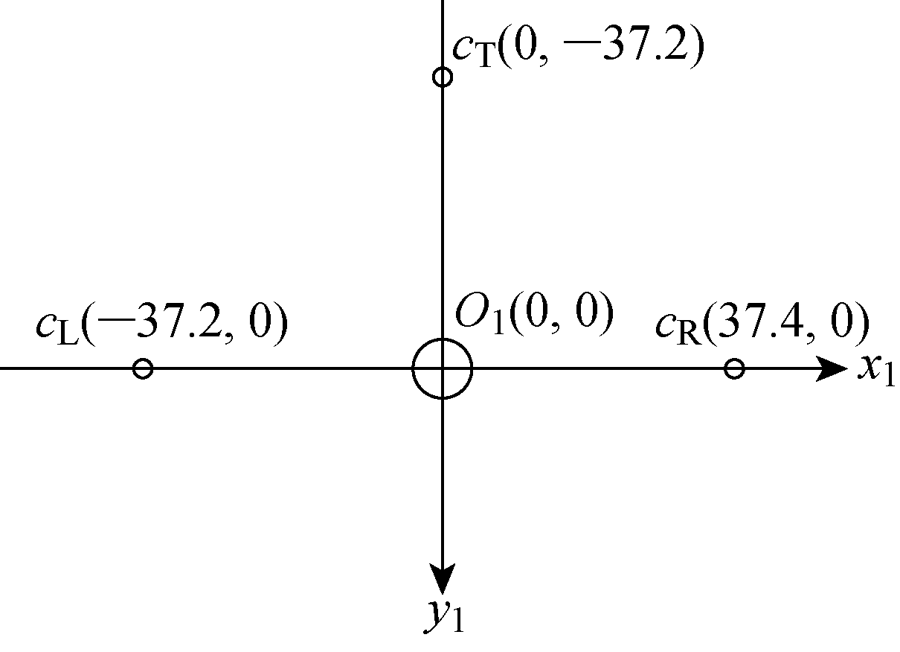
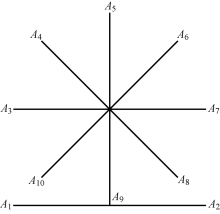
图6
测试图案
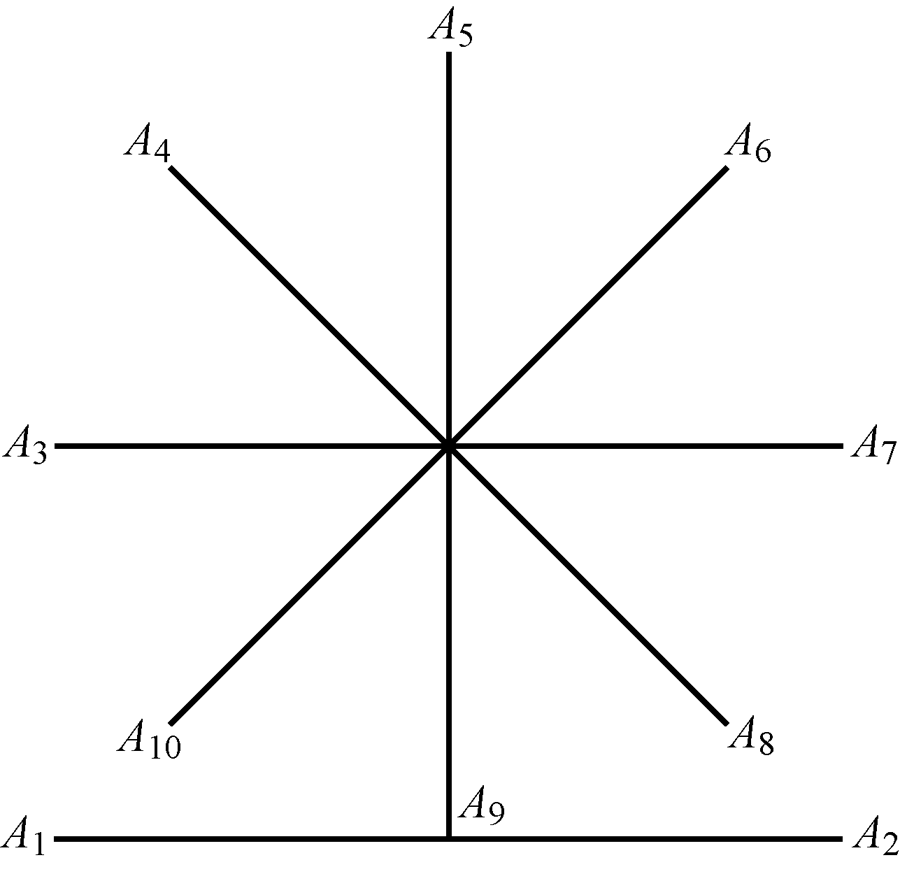
图7
试验测试场景
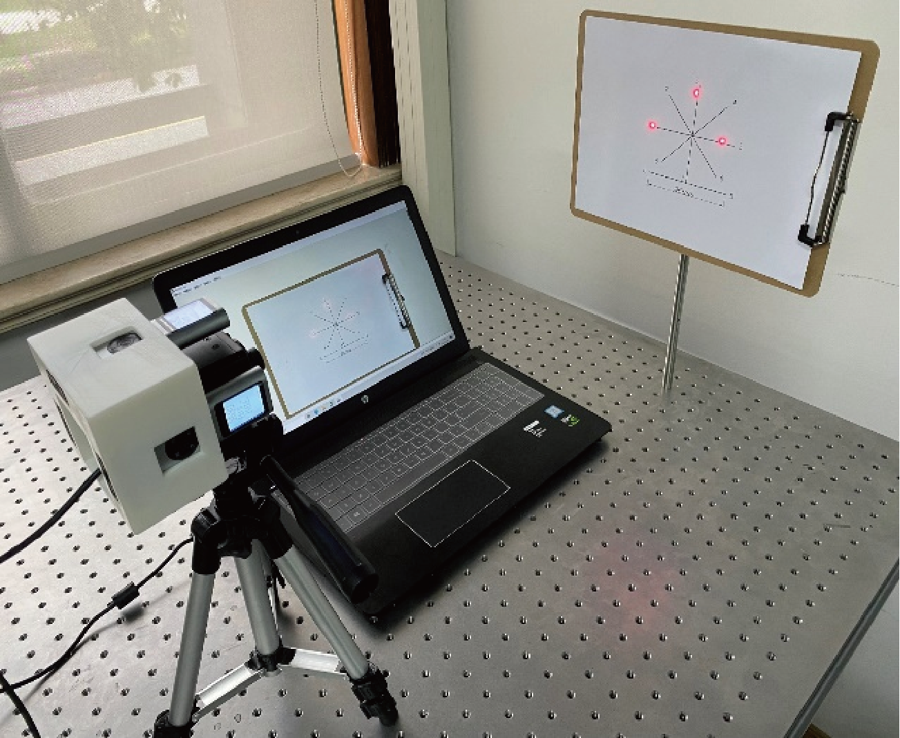
表1
不同试验场景下的激光测距值
| 场景 | 各点激光测距值/mm | ||
|---|---|---|---|
| CL | CT | CR | |
| I | 245 | 245 | 244 |
| II | 345 | 345 | 344 |
| III | 445 | 446 | 443 |
| IV | 545 | 545 | 543 |
| V | 645 | 646 | 644 |
表2
线段长度测量结果
| 线段 | 场景I | 场景II | 场景III | 场景IV | 场景V | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 测量值/ mm | 相对 误差/% | 测量值/ mm | 相对 误差/% | 测量值/ mm | 相对 误差/% | 测量值/ mm | 相对 误差/% | 测量值/ mm | 相对 误差/% | |||||
| lA3A7 | 95.857 | -0.15 | 95.610 | -0.41 | 96.088 | 0.09 | 96.057 | 0.06 | 95.678 | -0.34 | ||||
| lA4A8 | 95.785 | -0.22 | 95.582 | -0.44 | 95.923 | -0.08 | 96.148 | 0.15 | 95.834 | -0.17 | ||||
| lA5A9 | 95.532 | -0.49 | 95.577 | -0.44 | 95.928 | -0.08 | 96.084 | 0.09 | 95.779 | -0.23 | ||||
| lA6A10 | 95.666 | -0.35 | 95.661 | -0.35 | 95.717 | -0.29 | 96.127 | 0.13 | 95.984 | -0.02 | ||||
| lA1A2 | 96.088 | 0.09 | 95.978 | -0.02 | 96.027 | 0.03 | 95.975 | -0.03 | 95.879 | -0.13 | ||||
图8
激光测距误差的影响规律
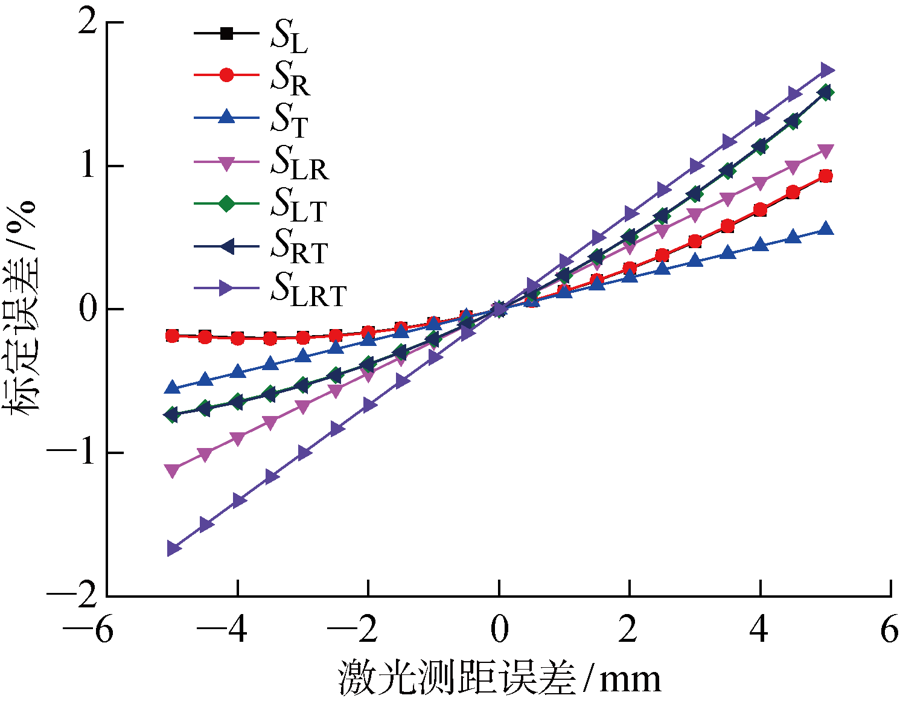
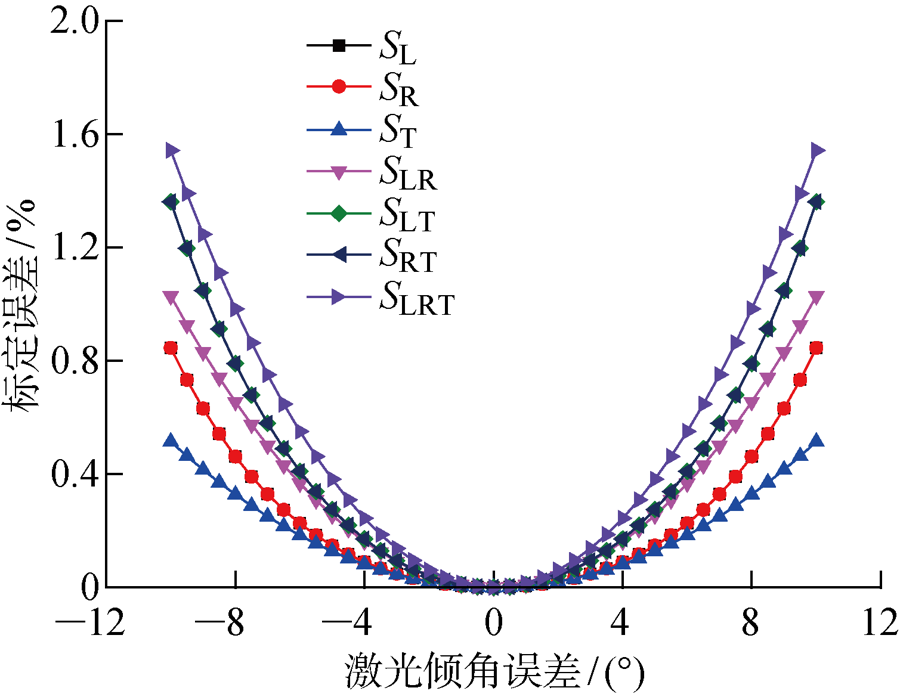
图9
激光倾角误差的影响规律
| [1] | 张鹏, 岳建锋, 李亮玉. 一种弧焊机器人熔池图像的快速标定方法[J]. 上海交通大学学报, 2008, 42(Sup. 1): 100-102. |
| ZHANG Peng, YUE Jianfeng, LI Liangyu. A fast calibration method of molten pool image from arc welding robot[J]. Journal of Shanghai Jiao Tong University, 2008, 42(Sup. 1): 100-102. | |
| [2] | RAZA S N, RAZA UR REHMAN H, LEE S G, et al. Artificial intelligence based camera calibration[C]∥2019 15th International Wireless Communications & Mobile Computing Conference. Tangier, Morocco: IEEE, 2019: 1564-1569. |
| [3] | 经小龙, 胡源, 郭为忠. 臂载线结构激光手眼矩阵的精确标定: 多坐标系转换法[J]. 上海交通大学学报, 2020, 54(6): 607-614. |
| JING Xiaolong, HU Yuan, GUO Weizhong. High-accuracy calibration of hand-eye matrix of line-structured laser sensor: Multiple coordinates transformation[J]. Journal of Shanghai Jiao Tong University, 2020, 54(6): 607-614. | |
| [4] | 李颢, 杨明. 基于非线性逆透视变换的摄像机畸变参数标定[J]. 上海交通大学学报, 2008, 42(10): 1736-1739. |
| LI Hao, YANG Ming. A nonlinear inverse perspective transform based method for camera distortion calibration[J]. Journal of Shanghai Jiao Tong University, 2008, 42(10): 1736-1739. | |
| [5] |
TSAI R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J]. IEEE Journal on Robotics and Automation, 1987, 3(4): 323-344.
doi: 10.1109/JRA.1987.1087109 URL |
| [6] |
ZHANG Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334.
doi: 10.1109/34.888718 URL |
| [7] | SEO Y, HONG K S. About the self-calibration of a rotating and zooming camera: Theory and practice[C]∥Proceedings of the Seventh IEEE International Conference on Computer Vision. Kerkyra, Greece: IEEE, 1999: 183-189. |
| [8] | LEE S, KAY Y. Vision based manipulator self-calibration with motion estimation[C]∥Proceedings of 32nd IEEE Conference on Decision and Control. San Antonio, TX, USA: IEEE, 1993: 1610-1616. |
| [9] | FAUGERAS O D, LUONG Q T, MAYBANK S J. Camera self-calibration: Theory and experiments[M]∥Computer vision — ECCV’92. Berlin, Heidelberg: Springer Berlin Heidelberg, 1992: 321-334. |
| [10] | 王澜, 孙博, 隆昌宇, 等. 一种基于共线特征点的线阵相机内参标定方法[J]. 红外与激光工程, 2015, 44(6): 1878-1883. |
| WANG Lan, SUN Bo, LONG Changyu, et al. A novel method for calibrating intrinsic parameters of linear array cameras based on collinear feature points[J]. Infrared and Laser Engineering, 2015, 44(6): 1878-1883. | |
| [11] | TRIGGS B. Autocalibration from planar scenes[M]∥Computer vision — ECCV’98. Berlin, Heidelberg: Springer Berlin Heidelberg, 1998: 89-105. |
| [12] | 王宗盛, 苏志龙, 韩永胜, 等. 基于图像特征分布优化的相机外参自标定[J]. 中国科学: 技术科学, 2021, 51(11): 1410-1418. |
| WANG Zongsheng, SU Zhilong, HAN Yongsheng, et al. External parameter calibration based on image feature distribution optimization[J]. Scientia Sinica (Technologica), 2021, 51(11): 1410-1418. | |
| [13] | 陈文艺, 许洁, 杨辉. 利用双神经网络的相机标定方法[J]. 红外与激光工程, 2021, 50(11): 294-302. |
| CHEN Wenyi, XU Jie, YANG Hui. Camera calibration method based on double neural network[J]. Infrared and Laser Engineering, 2021, 50(11): 294-302. | |
| [14] | GOMEZ-OJEDA R, BRIALES J, FERNANDEZ-MORAL E, et al. Extrinsic calibration of a 2D laser-rangefinder and a camera based on scene corners[C]∥2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA: IEEE, 2015: 3611-3616. |
| [15] | 黄志清, 苏毅, 王庆文, 等. 二维激光雷达与可见光相机外参标定方法研究[J]. 仪器仪表学报, 2020, 41(9): 121-129. |
| HUANG Zhiqing, SU Yi, WANG Qingwen, et al. Research on extrinsic parameter calibration method of 2D laser rangefinder (LRF) and visible light camera[J]. Chinese Journal of Scientific Instrument, 2020, 41(9): 121-129. | |
| [16] | 崔灿, 鲁寨军, 黄磊. 线激光辅助单目视觉测量铁路侵限异物尺寸[J]. 铁道科学与工程学报, 2017, 14(2): 349-354. |
| CUI Can, LU Zhaijun, HUANG Lei. A size measurement method for the foreign objects in railway lines using monocular vision and linear laser[J]. Journal of Railway Science and Engineering, 2017, 14(2): 349-354. | |
| [17] |
PAN X J, WU J Y, LI Z L, et al. Self-calibration for linear structured light 3D measurement system based on quantum genetic algorithm and feature matching[J]. Optik, 2021, 225: 165749.
doi: 10.1016/j.ijleo.2020.165749 URL |
| [18] | 钟新谷, 彭雄, 沈明燕. 基于无人飞机成像的桥梁裂缝宽度识别可行性研究[J]. 土木工程学报, 2019, 52(4): 52-61. |
| ZHONG Xingu, PENG Xiong, SHEN Mingyan. Study on the feasibility of identifying concrete crack width with images acquired by unmanned aerial vehicles[J]. China Civil Engineering Journal, 2019, 52(4): 52-61. | |
| [19] | XU Y, BROWNJOHN J, KONG D L. A non-contact vision-based system for multipoint displacement monitoring in a cable-stayed footbridge[J]. Structural Control and Health Monitoring, 2018, 25(5): 2155. |
| [20] |
WU L J, CASCIATI F, CASCIATI S. Dynamic testing of a laboratory model via vision-based sensing[J]. Engineering Structures, 2014, 60: 113-125.
doi: 10.1016/j.engstruct.2013.12.002 URL |
| [21] | LEE J, CHO S, SIM S. Monocular vision-based displacement measurement system robust to angle and distance using homography[C]∥Proceedings of the 6th International Conference on Advances in Experimental Structural Engineering. Illinois, USA: AESE, 2015: 1-9. |
| [1] | 汪维, 阮雅端, 顾鹏, 陈启美. 基于融合注意力机制DAUNet的最大裂缝宽度计算[J]. 上海交通大学学报, 2025, 59(12): 1866-1877. |
| [2] | 毛彦嵋, 李华锋, 张亚飞. 面向跨区域场景的无监督域自适应行人重识别[J]. 上海交通大学学报, 2025, 59(12): 1878-1890. |
| [3] | 詹泽辉, 钟铭恩, 袁彬淦, 谭佳威, 范康. 随机平视摄像条件下的路边车辆违停检测[J]. 上海交通大学学报, 2025, 59(10): 1568-1580. |
| [4] | 王鸿鑫, 徐德刚, 周楷文, 李林文, 温新. 数据驱动的流场稀疏数据建模[J]. 上海交通大学学报, 2025, 59(5): 684-690. |
| [5] | 包家汉, 孙德尚, 黄建中, 胡政. 基于自适应阈值的型钢精确角点FAST检测算法[J]. 上海交通大学学报, 2025, 59(5): 691-702. |
| [6] | 刘建欣, 潘如如, 周建. 基于欠完备字典重构的无监督织物疵点检测方法[J]. 上海交通大学学报, 2025, 59(2): 283-292. |
| [7] | 王可, 刘奕阳, 杨杰, 鲁爱国, 李哲, 徐明亮. 基于自适应特征增强和融合的舰载机着舰拉制状态识别[J]. 上海交通大学学报, 2025, 59(2): 274-282. |
| [8] | 章涛, 张雪瑞, 陈勇, 钟科林, 罗其俊. 面向民机可视导航的场面多尺度目标检测[J]. 上海交通大学学报, 2024, 58(11): 1816-1825. |
| [9] | 牛国臣, 孙翔宇, 苑峥岩. 基于双流特征提取的车路协同感知方法[J]. 上海交通大学学报, 2024, 58(11): 1826-1834. |
| [10] | 王宝坤, 王如路, 陈锦剑, 潘越, 王鲁杰. 基于深度学习的盾构隧道表观病害自动检测方法[J]. 上海交通大学学报, 2024, 58(11): 1716-1723. |
| [11] | 秦菁, 文渊博, 高涛, 刘瑶. 面向多天气退化图像恢复的自注意力扩散模型[J]. 上海交通大学学报, 2024, 58(10): 1606-1617. |
| [12] | 李春喜, 乔涵哲, 姚刚, 姜淏予, 崔向科, 葛泉波. 基于RBF-BLS面向电动汽车低碳安全出行的SOH估计方法[J]. 上海交通大学学报, 2024, 58(9): 1454-1464. |
| [13] | 黄鹤, 胡凯益, 杨澜, 王浩, 高涛, 王会峰. 智能行车记录仪图像去雾系统的FPGA设计[J]. 上海交通大学学报, 2024, 58(4): 565-578. |
| [14] | 黄鹤, 胡凯益, 李战一, 王会峰, 茹锋, 王珺. 融合MCAP和GRTV正则化的无人机航拍建筑物图像去雾方法[J]. 上海交通大学学报, 2023, 57(3): 366-378. |
| [15] | 李钰, 杨道勇, 刘玲亚, 王易因. 利用生成对抗网络实现水下图像增强[J]. 上海交通大学学报, 2022, 56(2): 134-142. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||