上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (6): 809-817.doi: 10.16183/j.cnki.jsjtu.2021.060
所属专题: 《上海交通大学学报》2022年“机械与动力工程”专题
吴灌伦, 施光林( )
)
收稿日期:2021-02-26
出版日期:2022-06-28
发布日期:2022-07-04
通讯作者:
施光林
E-mail:glshi@263.net
作者简介:吴灌伦(1990-),男,内蒙古自治区赤峰市人,博士生,主要从事连续体机械臂研究.
基金资助:
WU Guanlun, SHI Guanglin()
Received:2021-02-26
Online:2022-06-28
Published:2022-07-04
Contact:
SHI Guanglin
E-mail:glshi@263.net
摘要:
设计并实现了具有5个定位自由度的连续体机械臂,以提高连续体机构在诸如腔内作业、轻物品抓取、人机协作等场景中的灵活定位能力.设计中,引入了二段定曲率模型,用旋量方法从几何上解释了该设计的自由度分配.两段可伸缩式并联机构的串联耦合,形成二段弯曲结构,其每一段有两个方向的弯曲自由度和一个伸缩自由度,从而组合出末端的5个自由度.围绕手臂的高动态性能,制作了样机的机电运动系统.实验结果表明,样机实现了连续体机械臂末端的自由度控制,可在2 s内到达极限姿态,其定位精度约为臂长的2%.
中图分类号:
吴灌伦, 施光林. 双并联机构耦合连续体机械臂的设计与实现[J]. 上海交通大学学报, 2022, 56(6): 809-817.
WU Guanlun, SHI Guanglin. Design and Realization of Continuum Manipulator Based on Coupling of Double Parallel Mechanism[J]. Journal of Shanghai Jiao Tong University, 2022, 56(6): 809-817.
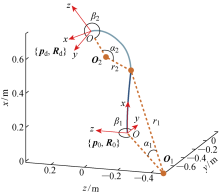
图1
二段圆弧模型仿真
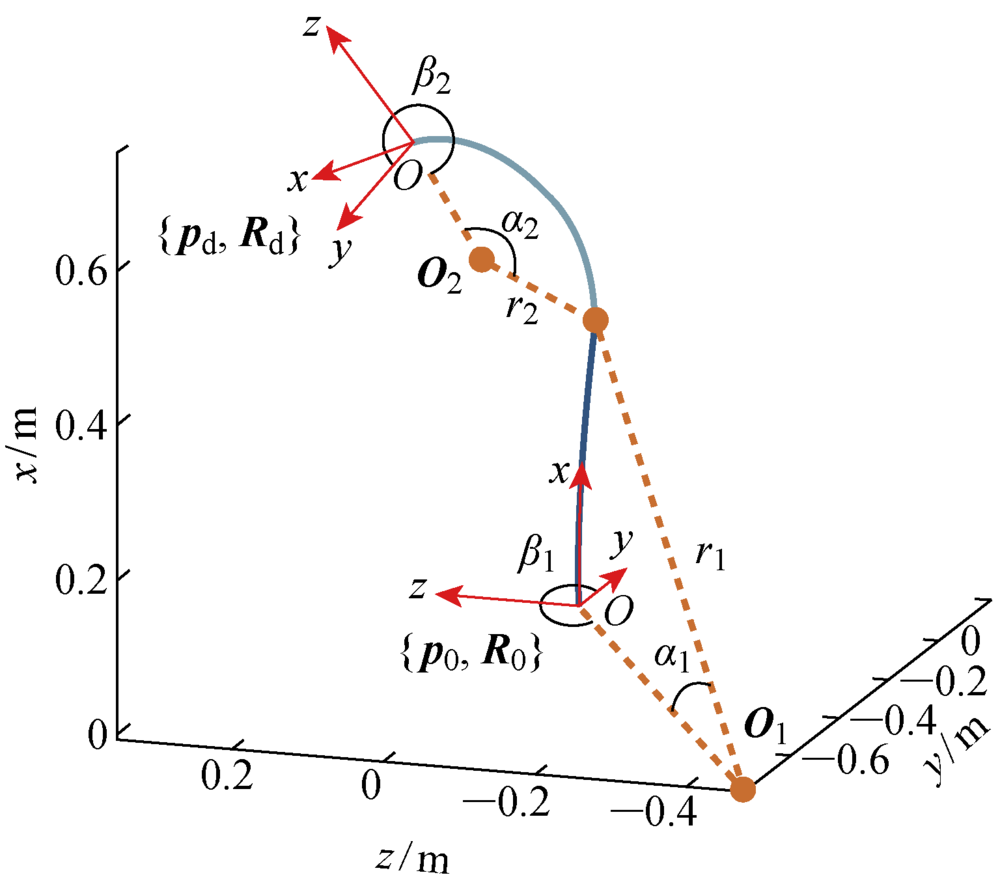
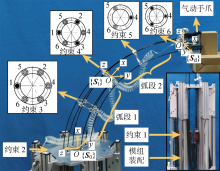
图2
并联机构耦合连续体机械臂结构图
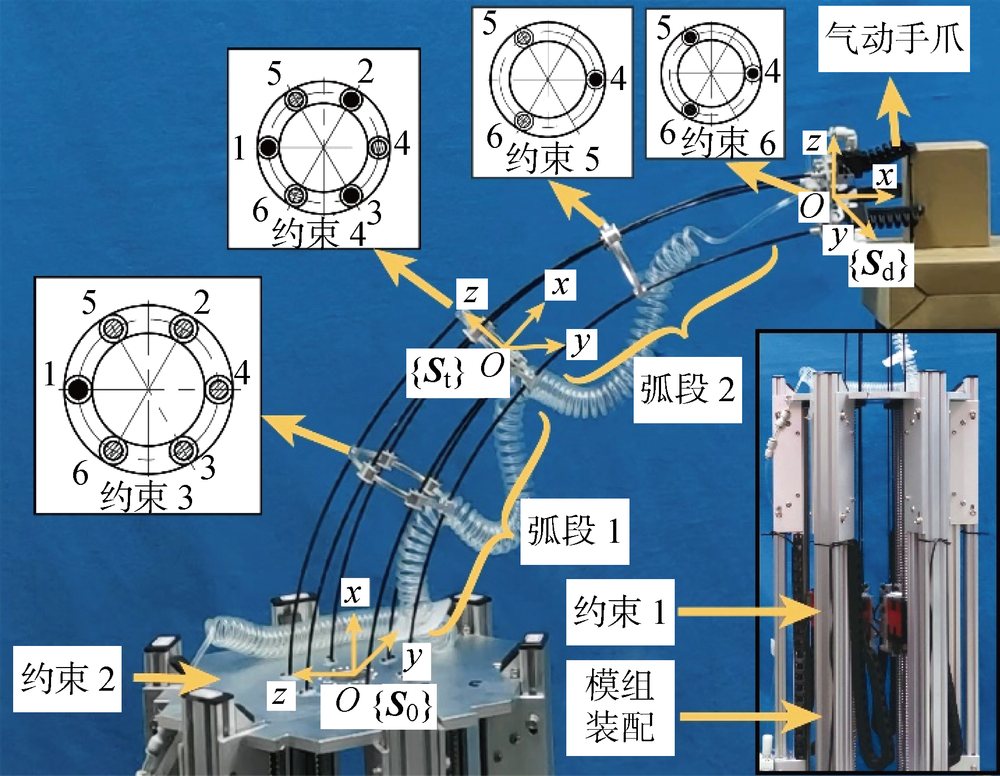

图3
并联机构二段圆弧模型运动学姿态图
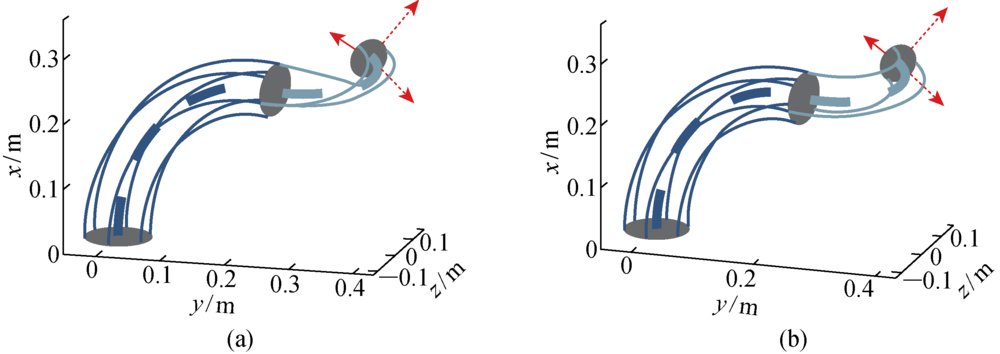
表1
约束盘与杆的设计参数
| j | ρj/ mm | θj,i/(°) |
|---|---|---|
| 1 | 50 | 90, 330, 210, 270, 30, 150 |
| 2 | 50 | 90, 330, 210, 270, 30, 150 |
| 3 | 45 | 90, 330, 210, 270, 30, 150 |
| 4 | 40 | 90, 330, 210, 270, 30, 150 |
| 5 | 35 | 270, 30, 150 |
| 6 | 30 | 270, 30, 150 |
表2
超弹性杆机械性能参数
| 特性 | 取值 |
|---|---|
| 材料 | 玻璃纤维 |
| 直径/mm | 3 |
| 密度/(kg·m-3) | 1.96×103 |
| 弹性模量/Pa | 4.1×1010 |
表3
模组滑台参数
| 参数 | 取值 |
|---|---|
| 有效行程/mm | 600 |
| 导程/mm | 10 |
| 滑块额定速度/(mm·s-1) | 500 |
| 滑块推荐加速度/(mm·s-2) | 500 |
| 定位精度/mm | 0.05 |
图4
电机的速度-时间梯形曲线
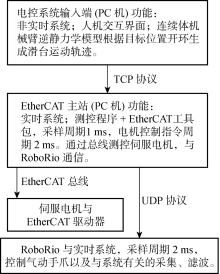
图5
电控系统结构示意图
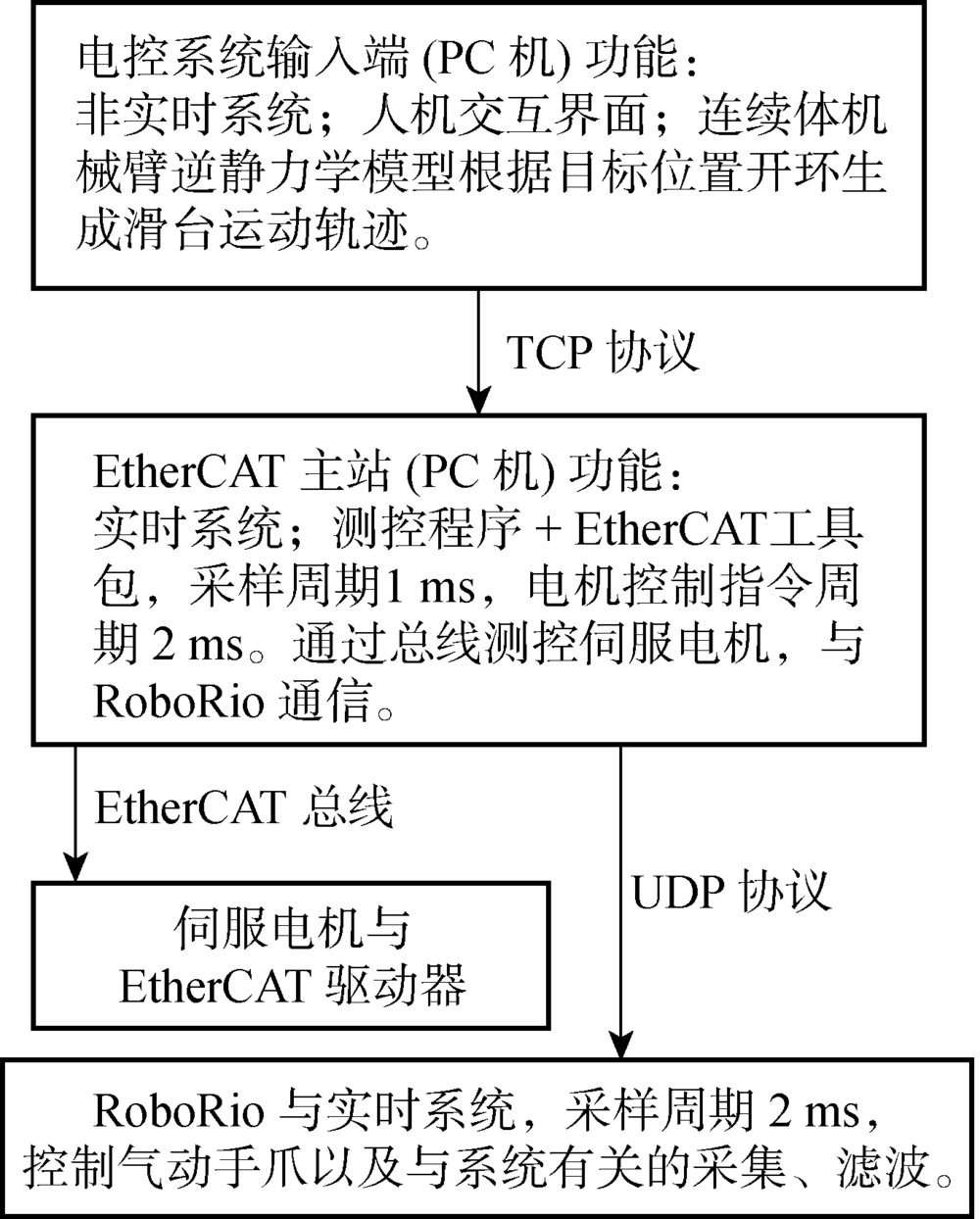
图6
极限姿态图
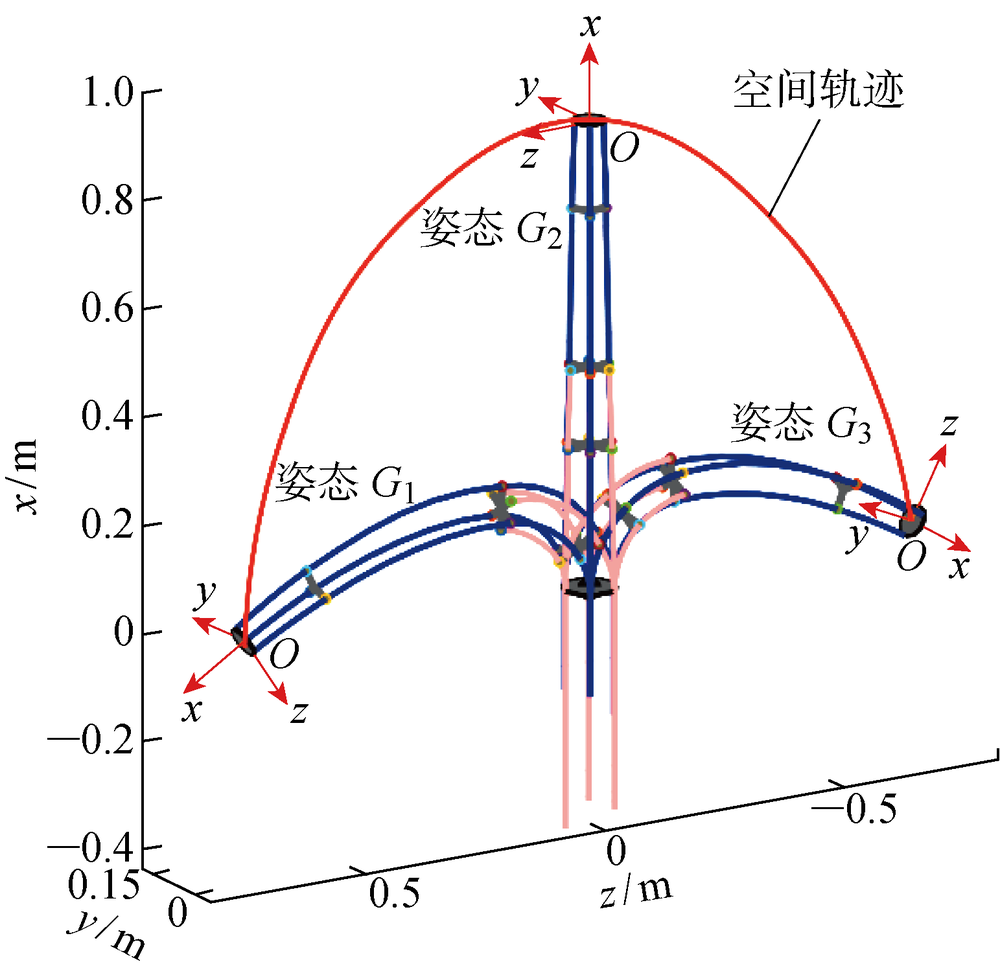
表4
180° 弯曲姿态关键位姿点
| x/mm | y/mm | z/mm | Rd,x1 | Rd,x2 | Rd,x3 |
|---|---|---|---|---|---|
| 663 | 0 | 0 | 1 | 0 | 0 |
| 300 | 0 | -400 | 0 | 0 | -1 |
| 60 | 0 | -450 | -1 | 0 | 0 |
| 0 | 0 | -420 | -1 | 0 | 0 |

图7
快动开环轨迹实验图
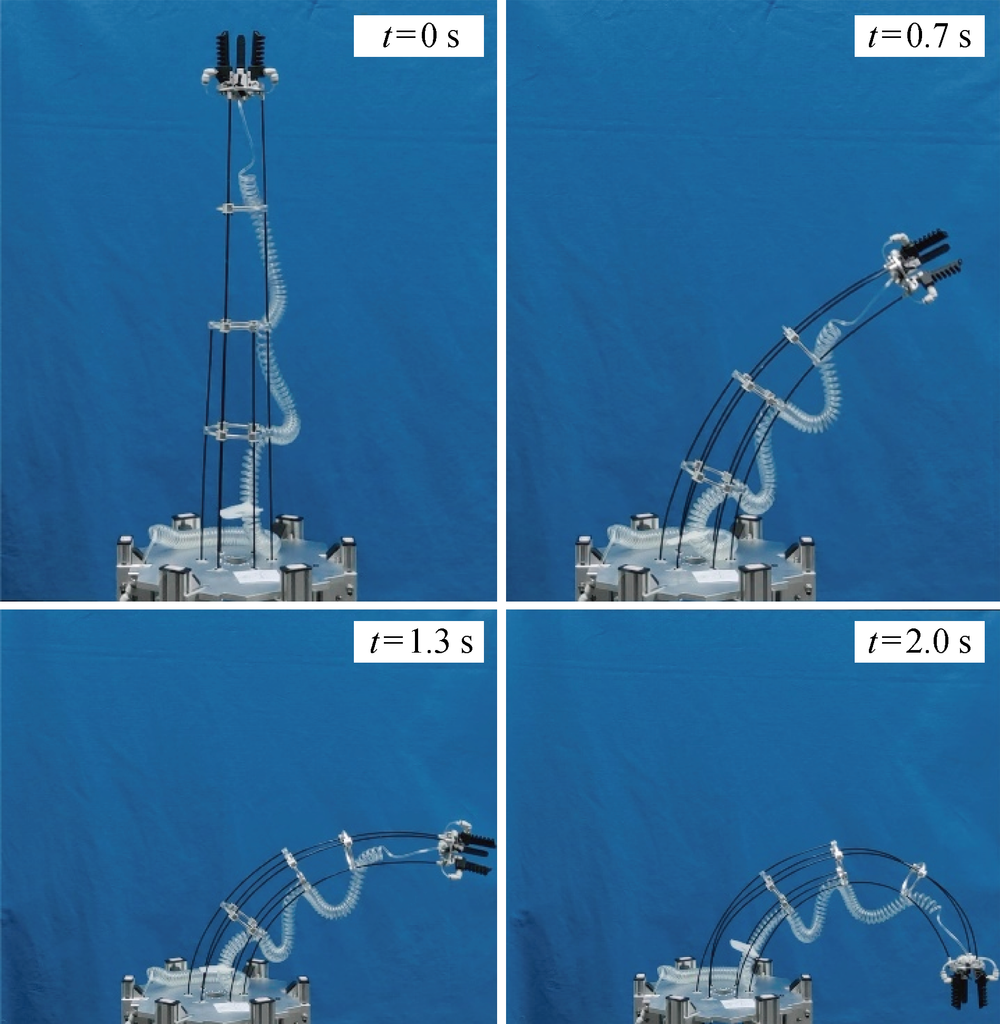
图8
空间5自由度定位实验图
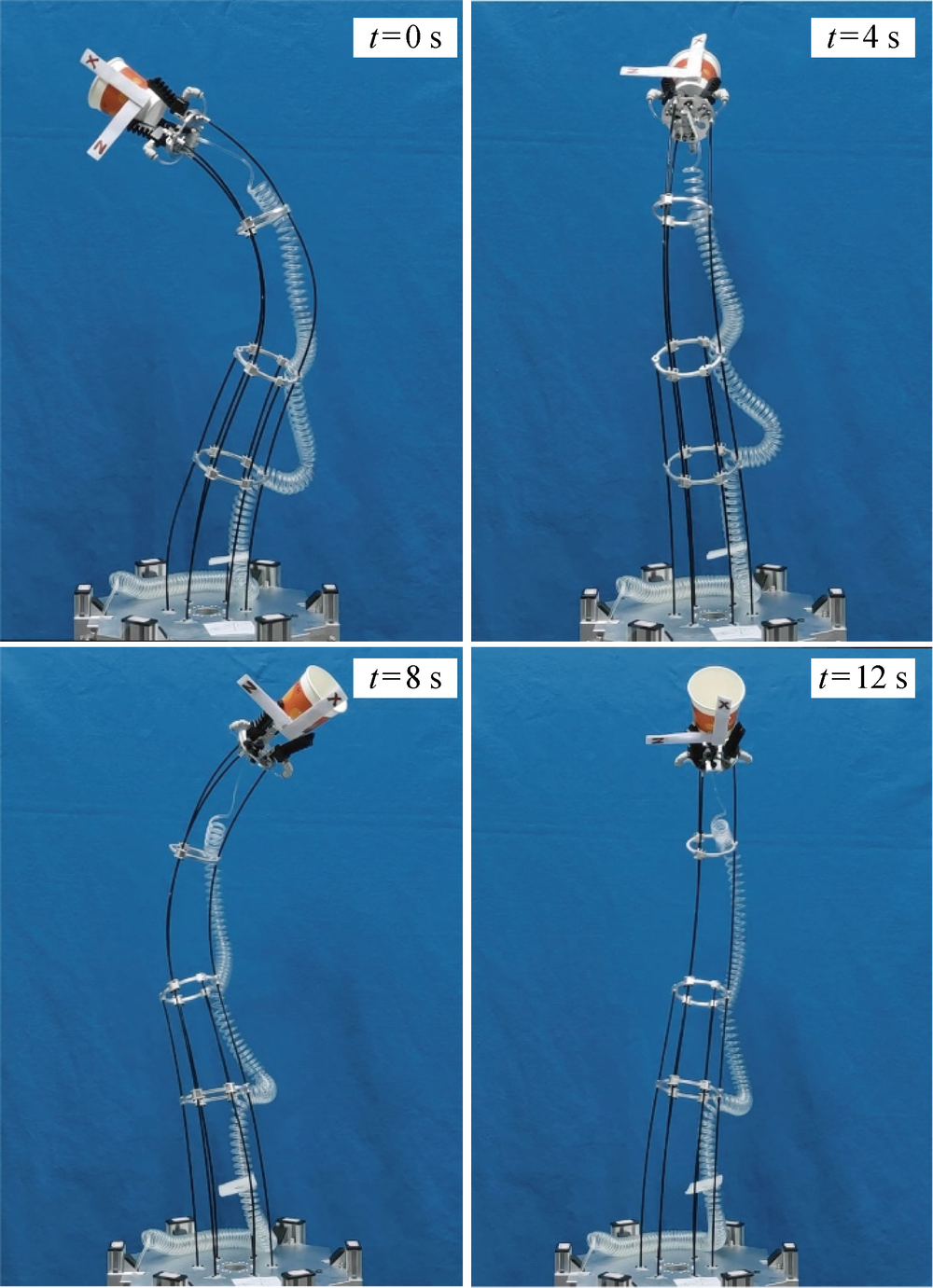
图9
由机械臂标记点测量平面定位误差
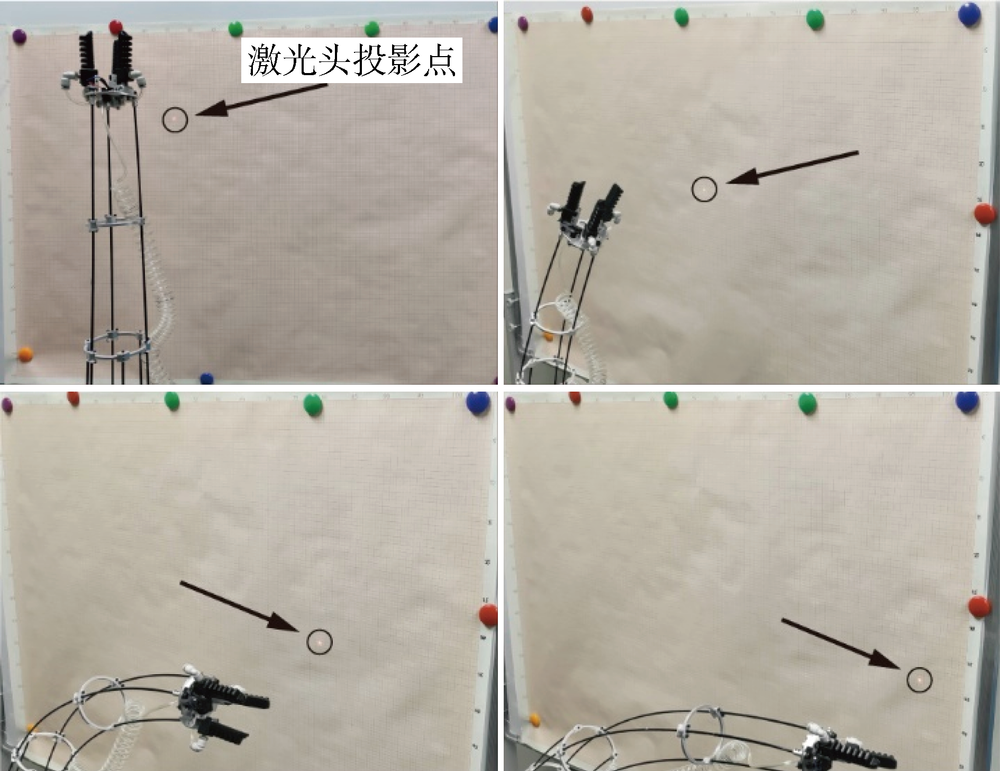
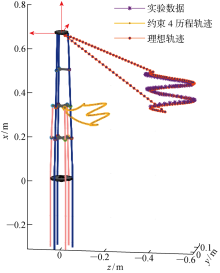
图10
开环跟踪实验
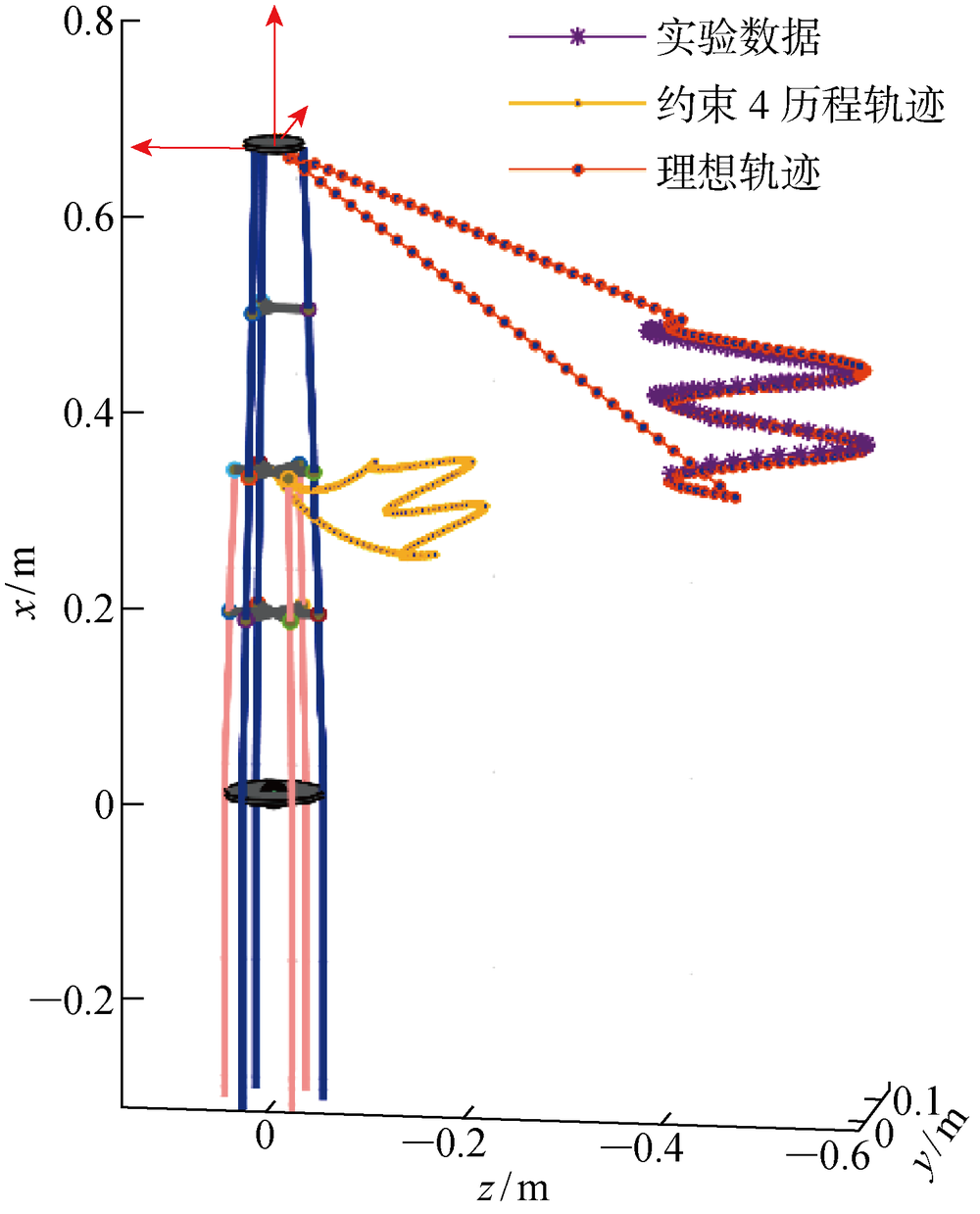
表5
理想目标位置和测量位置坐标值对比
| 目标点 x/mm | 目标点 z/mm | 坐标版 x/mm | 坐标版 z/mm | 距离 D/mm |
|---|---|---|---|---|
| 486.2 | -406.5 | 480.5 | -406.6 | 5.7 |
| 449.2 | -582.9 | 447.5 | -585.6 | 3.2 |
| 375.4 | -590.0 | 378.9 | -600.2 | 10.8 |
| 414.5 | -390.5 | 422.8 | -387.3 | 8.9 |
| 336.2 | -390.1 | 342.5 | -402.6 | 14.0 |
| [1] |
徐凯, 刘欢. 多杆连续体机构: 构型与应用[J]. 机械工程学报, 2018, 54(13): 25-33.
doi: 10.3901/JME.2018.13.025 |
|
XU Kai, LIU Huan. Multi-backbone continuum mechanisms: Forms and applications[J]. Journal of Mechanical Engineering, 2018, 54(13): 25-33.
doi: 10.3901/JME.2018.13.025 |
|
| [2] | 赵亮, 赵智远, 朱德勇, 等. 用于微创外科的线驱动连续型手术机器人设计与仿真研究[J]. 机电工程, 2020, 37(4): 451-455. |
| ZHAO Liang, ZHAO Zhiyuan, ZHU Deyong, et al. Design and simulation of line-driven continuum surgical robot for minimally invasive surgery[J]. Journal of Mechanical & Electrical Engineering, 2020, 37(4): 451-455. | |
| [3] |
CHEN Y Y, ZHANG S A, WU Z H, et al. Review of surgical robotic systems for keyhole and endoscopic procedures: State of the art and perspectives[J]. Frontiers of Medicine, 2020, 14(4): 382-403.
doi: 10.1007/s11684-020-0781-x URL |
| [4] |
LIU S T, YANG Z X, ZHU Z J, et al. Development of a dexterous continuum manipulator for exploration and inspection in confined spaces[J]. Industrial Robot: An International Journal, 2016, 43(3): 284-295.
doi: 10.1108/IR-07-2015-0142 URL |
| [5] |
周圆圆, 李建华, 郭明全, 等. 连续体单孔手术机器人的建模与优化分析[J]. 机器人, 2020, 42(3): 316-324.
doi: 10.13973/j.cnki.robot.190371 |
|
ZHOU Yuanyuan, LI Jianhua, GUO Mingquan, et al. Modeling and optimization analysis of a continuum robot for single-port surgery[J]. Robot, 2020, 42(3): 316-324.
doi: 10.13973/j.cnki.robot.190371 |
|
| [6] |
XU K, ZHAO J R, FU M X. Development of the SJTU unfoldable robotic system (SURS) for single port laparoscopy[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(5): 2133-2145.
doi: 10.1109/TMECH.2014.2364625 URL |
| [7] | ZHAO B, ZENG L Y, WU B B, et al. A continuum manipulator with closed-form inverse kinematics and independently tunable stiffness[C]∥2020 IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020: 1847-1853. |
| [8] |
XU K, SIMAAN N. Intrinsic wrench estimation and its performance index for multisegment continuum robots[J]. IEEE Transactions on Robotics, 2010, 26(3): 555-561.
doi: 10.1109/TRO.2010.2046924 URL |
| [9] | TILL J, BRYSON C E, CHUNG S, et al. Efficient computation of multiple coupled Cosserat rod models for real-time simulation and control of parallel continuum manipulators[C]∥2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA: IEEE, 2015: 5067-5074. |
| [10] | 方跃法, 林华杰. 连续体并联抓取机器人的结构设计及运动学分析[J]. 北京交通大学学报, 2019, 43(4): 80-87. |
| FANG Yuefa, LIN Huajie. Structural design and kinematics analysis of the continuum parallel grasping manipulator[J]. Journal of Beijing Jiaotong University, 2019, 43(4): 80-87. | |
| [11] |
WU G L, SHI G L. Experimental statics calibration of a multi-constraint parallel continuum robot[J]. Mechanism and Machine Theory, 2019, 136: 72-85.
doi: 10.1016/j.mechmachtheory.2019.02.013 URL |
| [12] | WU G L, SHI G L, SHI Y L. Modeling and analysis of a parallel continuum robot using artificial neural network[C]∥2017 IEEE International Conference on Mechatronics. Churchill, VIC, Australia: IEEE, 2017: 153-158. |
| [13] | BRYSON C E, RUCKER D C. Toward parallel continuum manipulators[C]∥2014 IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014: 778-785. |
| [14] |
汪培义, 郭盛, 王向阳, 等. 基于柔性并联连续体的灵巧操作手的设计及分析[J]. 机械工程学报, 2020, 56(19): 122-131.
doi: 10.3901/JME.2020.19.122 |
|
WANG Peiyi, GUO Sheng, WANG Xiangyang, et al. Design and analysis of a dexterous gripper based on flexible parallel continuum manipulator[J]. Journal of Mechanical Engineering, 2020, 56(19): 122-131.
doi: 10.3901/JME.2020.19.122 |
|
| [15] |
TILL J, RUCKER D C. Elastic stability of cosserat rods and parallel continuum robots[J]. IEEE Transactions on Robotics, 2017, 33(3): 718-733.
doi: 10.1109/TRO.2017.2664879 URL |
| [1] | 吴逸恺, 朱晔晨, 龚圣捷. 窄矩形流道内平板流致振动响应[J]. 上海交通大学学报, 2026, 60(2): 331-337. |
| [2] | . 多含水层中开挖降水作用下的圆形深基坑流固耦合分析及地层分布影响研究[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 475-485. |
| [3] | 贾志超, 刘明月, 郭琳. 内流作用下悬臂取水管动力响应特性研究[J]. 海洋工程装备与技术, 2026, 13(1): 46-57. |
| [4] | 万志朋, 崔林, 郑东生. 波流作用下海床振荡与累积响应的半动态耦合模型[J]. 上海交通大学学报, 2026, 60(1): 142-153. |
| [5] | 皇金锋, 章乾. 基于超螺旋扩张状态观测器的耦合单电感双输出Buck变换器串级滑模解耦控制[J]. 上海交通大学学报, 2025, 59(5): 592-604. |
| [6] | 刘逸, 张开林, 邵帅, 向泓旭. 基于热-流-固耦合的齿轮箱稳态热性能研究[J]. 上海交通大学学报, 2025, 59(5): 666-674. |
| [7] | 李仪博, 周前, 朱丹丹, 姜亚峰, 吴秋伟, 陈健. 提高海上风电场主动频率支撑能力的控制策略[J]. 上海交通大学学报, 2025, 59(10): 1442-1450. |
| [8] | 费壬翔, 徐海亮, 葛平娟, 陈翔宇. 不对称弱电网下双馈风力发电机稳定运行域评估及扩展方法[J]. 上海交通大学学报, 2025, 59(10): 1510-1522. |
| [9] | 张磊, 封少雄, 谭昆, 郭涛, 宋成果, 初秀民, 苗洋. 基于船舶-流场运动耦合的内河航道设计方法[J]. 上海交通大学学报, 2025, 59(1): 89-98. |
| [10] | 肖常胜, 周晓军, 祝米鑫. 生产调度与可靠性耦合的变工况再制造系统维护建模[J]. 上海交通大学学报, 2024, 58(8): 1211-1220. |
| [11] | 李雨瑶, 赵国成, 肖龙飞. 不同水力集矿模型的矿粒采集及环境扰动特性数值研究[J]. 上海交通大学学报, 2024, 58(7): 1036-1046. |
| [12] | 胡亚飞, 李克庆, 韩斌, 吉坤. 多因素耦合下尾砂胶结充填体强度优化与预测[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(5): 845-856. |
| [13] | 徐爱进. 国内首座海底数据舱下水过程的波浪抨击影响分析[J]. 海洋工程装备与技术, 2024, 11(4): 89-94. |
| [14] | 汤乾宇. 考虑波流耦合作用的平台涡激运动试验研究[J]. 海洋工程装备与技术, 2024, 11(4): 75-84. |
| [15] | 张宁博1, 安 晨1, 赵天奉1, 高松林1, 倪浩乘1, 周振宇2. 双船浮托法风机安装系统的多体耦合动力学分析[J]. 海洋工程装备与技术, 2024, 11(4): 58-66. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||