上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (6): 794-800.doi: 10.16183/j.cnki.jsjtu.2020.362
所属专题: 《上海交通大学学报》2022年“机械与动力工程”专题
李高阳, 贾爱亭, 洪波( ), 李湘文, 高佳篷
), 李湘文, 高佳篷
收稿日期:2020-11-06
出版日期:2022-06-28
发布日期:2022-07-04
通讯作者:
洪波
E-mail:hongbo@xtu.edu.cn
作者简介:李高阳(1968-),男,湖南省湘潭市人,博士,高级工程师,从事焊接设备及自动化研究.
基金资助:
LI Gaoyang, JIA Aiting, HONG Bo(), LI Xiangwen, GAO Jiapeng
Received:2020-11-06
Online:2022-06-28
Published:2022-07-04
Contact:
HONG Bo
E-mail:hongbo@xtu.edu.cn
摘要:
大型箱型梁在高速熔化极气体保护焊(GMAW)过程中存在定位焊缝、装配精度低,难以通过工装严格保证工件位姿,以及焊缝三维位姿实时变化等复杂工况.基于视觉的焊缝识别方法计算量大,且均不针对存在定位焊缝的工件,难以快速获取大型箱型梁的三维位姿.对此,提出一种基于激光位移传感和点云聚类快速分割的大型箱型梁高速GMAW三维位姿快速估计方法.利用该方法,通过点云快速分割得出大型箱型梁焊缝的立板平面和平板平面,进而解算出焊缝位姿信息.对多种不同位姿的焊缝进行位姿信息估计试验,结果表明:当焊接速度为1200 mm/min时,焊缝位姿误差分别在0.25 mm和1.8° 以内;增强了大型箱型梁自动焊接对定位焊缝、装配精度低等复杂工况的鲁棒性,提升了焊接质量.
中图分类号:
李高阳, 贾爱亭, 洪波, 李湘文, 高佳篷. 大型箱型梁高速GMAW三维位姿快速估计方法[J]. 上海交通大学学报, 2022, 56(6): 794-800.
LI Gaoyang, JIA Aiting, HONG Bo, LI Xiangwen, GAO Jiapeng. Fast 3D Pose Estimation Method for High Speed GMAW of Large Box Girders[J]. Journal of Shanghai Jiao Tong University, 2022, 56(6): 794-800.

图1
大型箱型梁工件
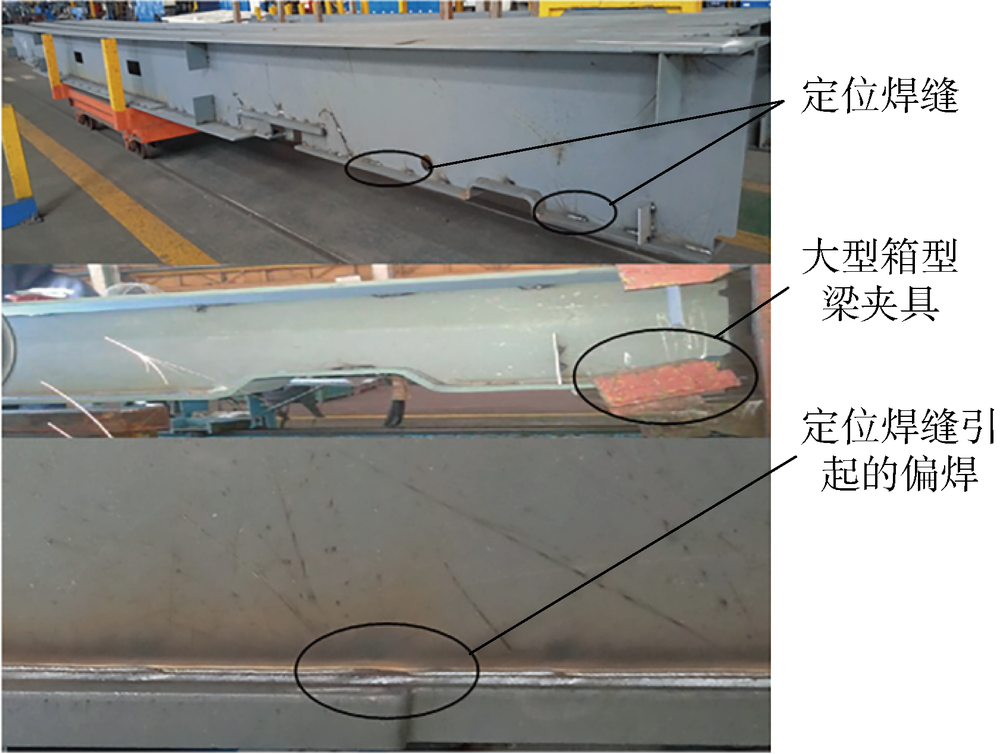
图2
点云数据获取
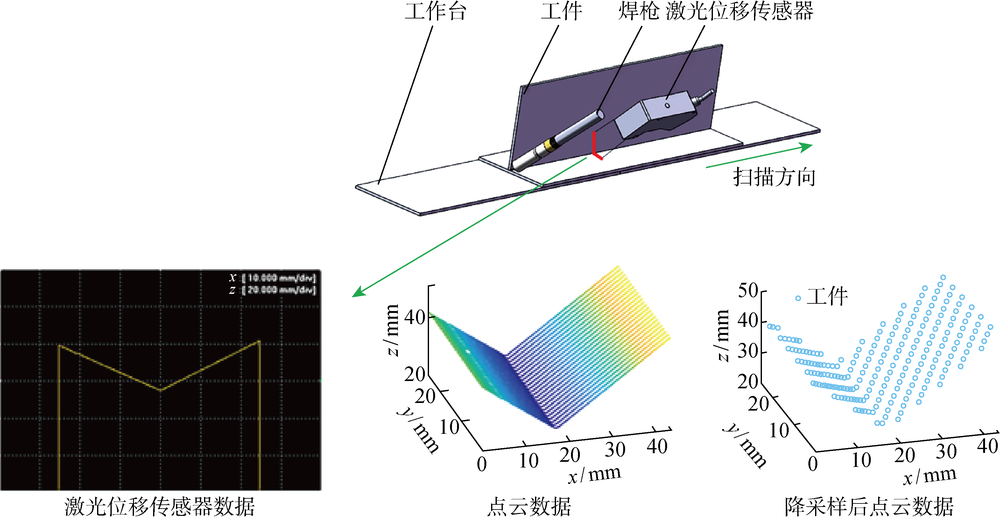
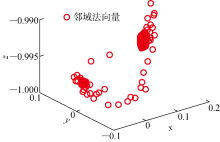
图3
焊缝点云邻域法向量
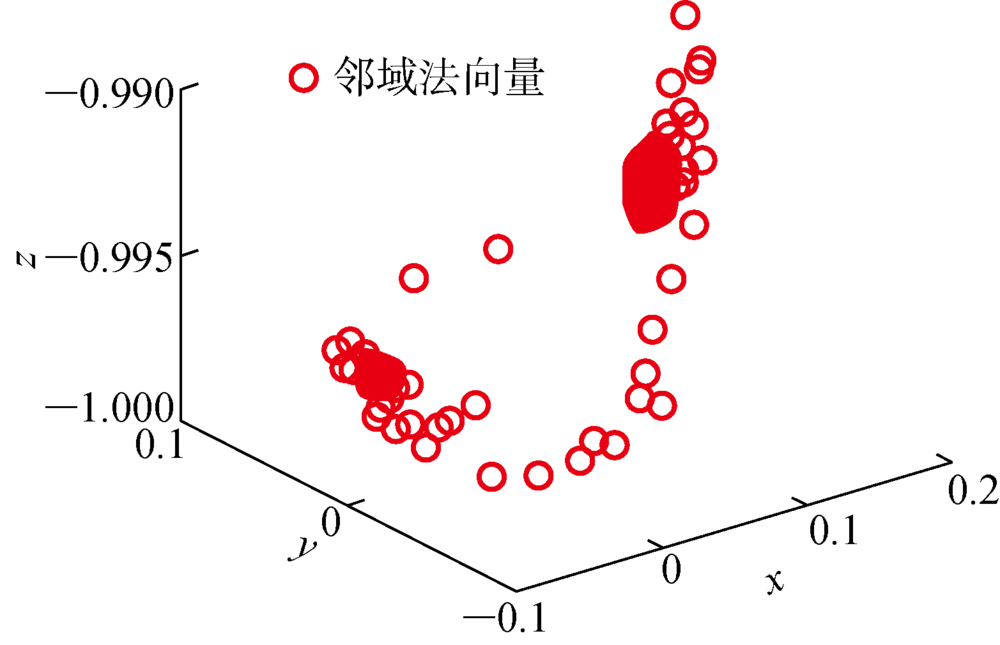
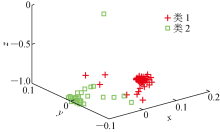
图4
焊缝点云邻域法向量聚类结果
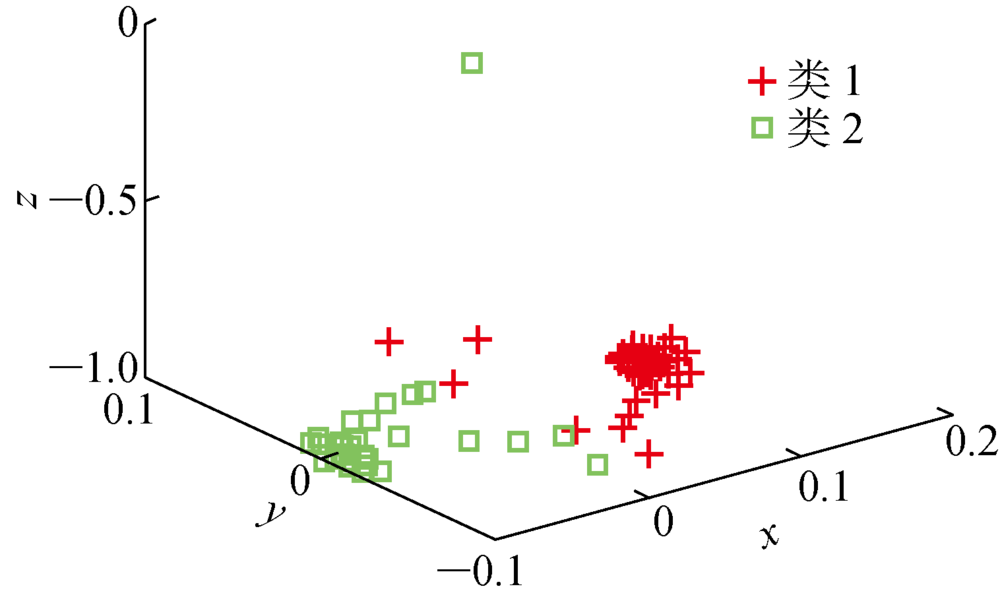
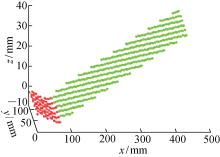
图5
焊缝点云数据分割结果
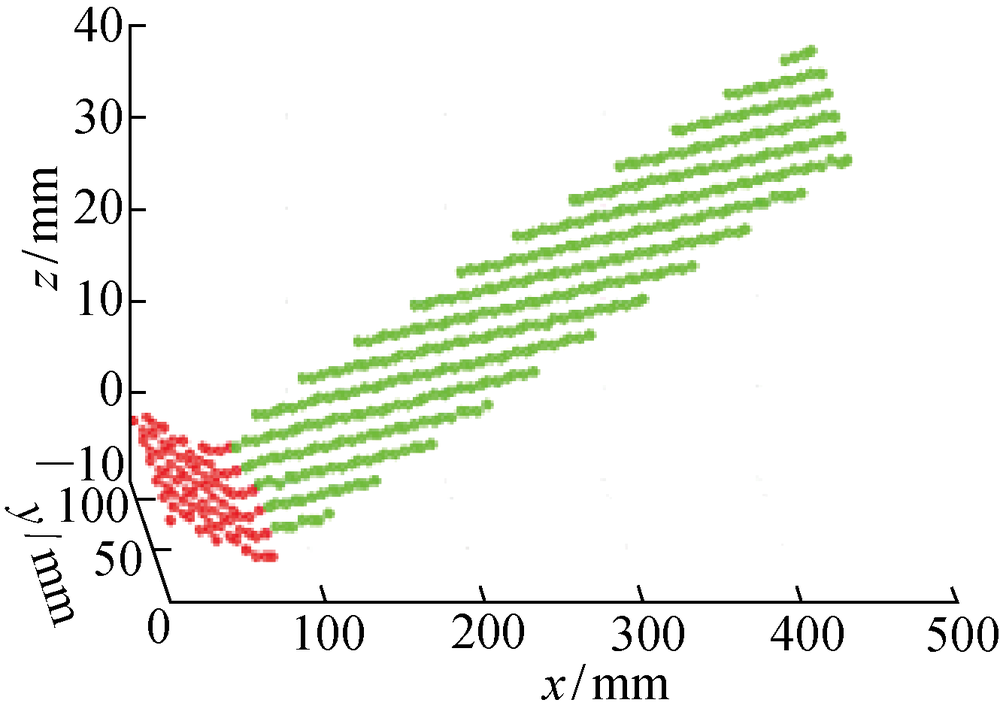
图6
LOF值
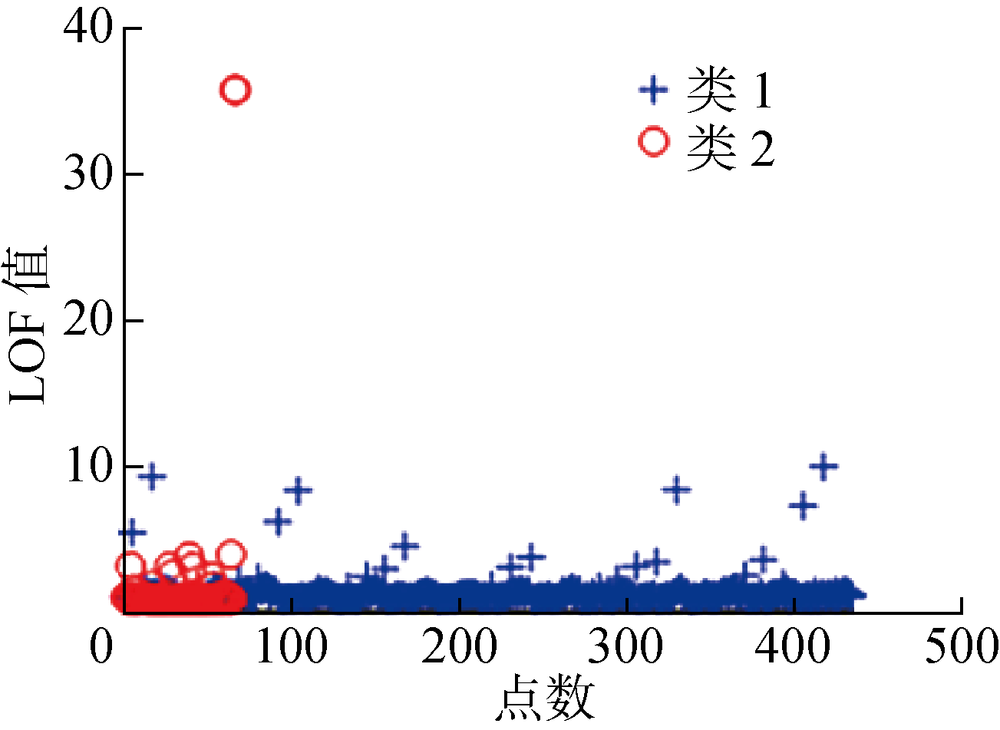
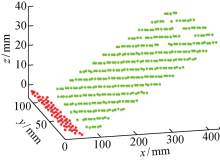
图7
LOF滤波后点云数据
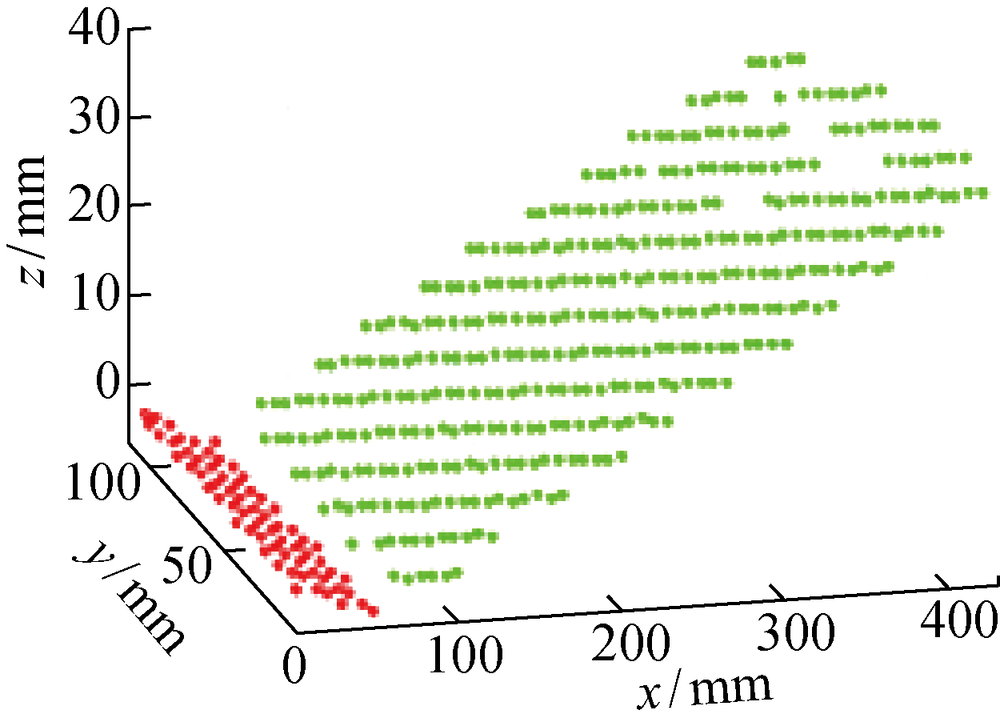
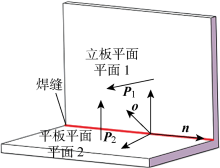
图8
箱型梁焊缝位姿模型
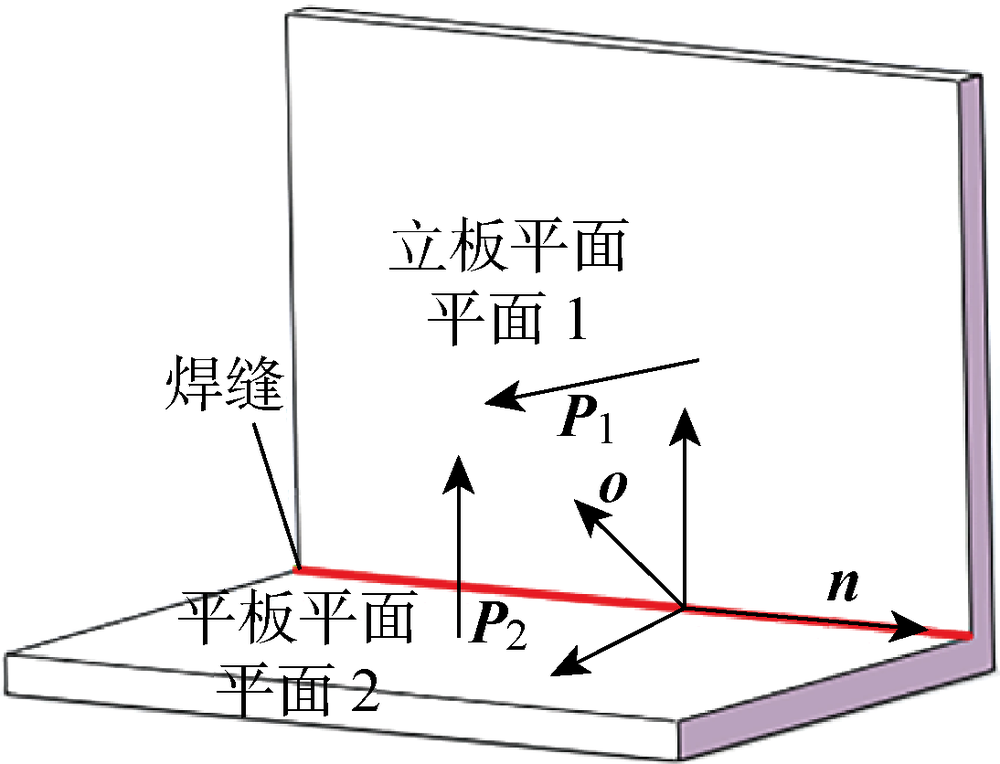
图9
试验系统结构
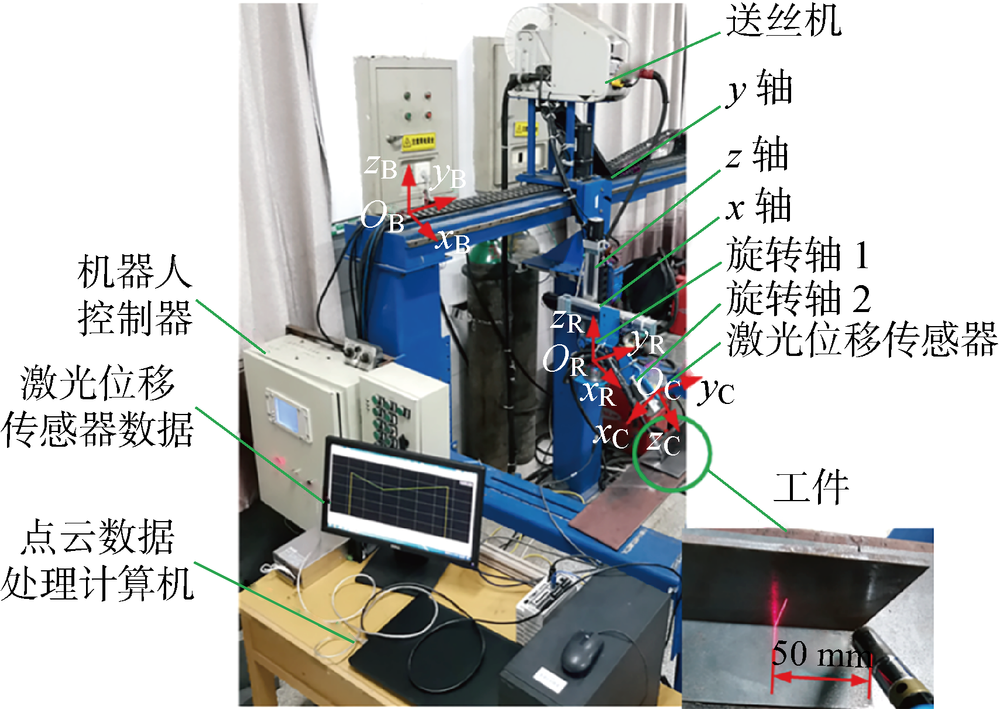
图10
不同位姿焊缝位姿估计结果
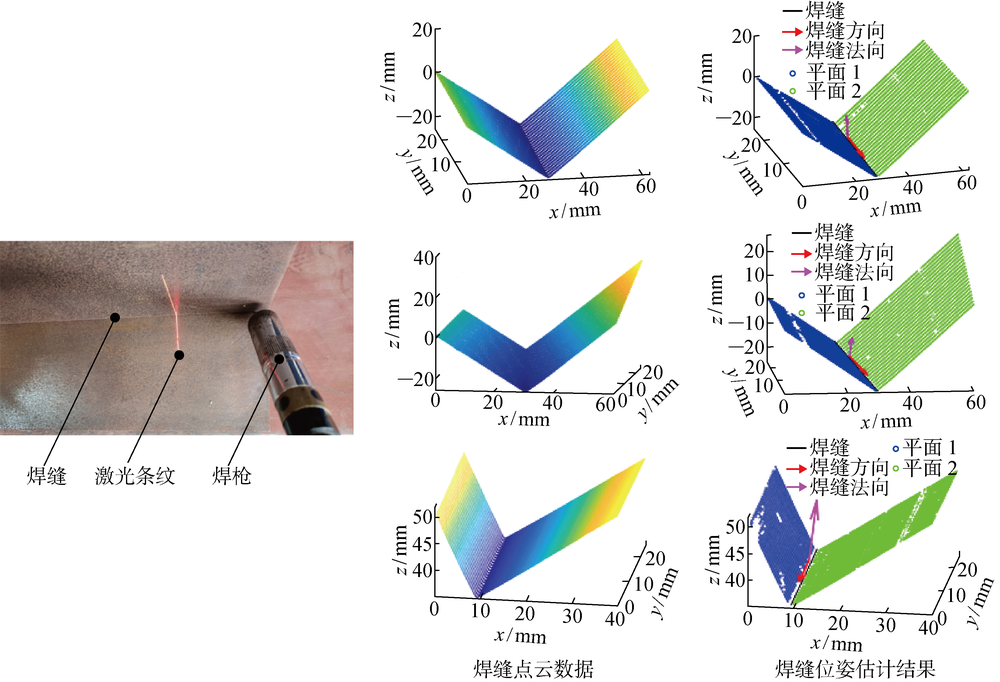
图11
定位焊点对焊缝位姿估计的影响
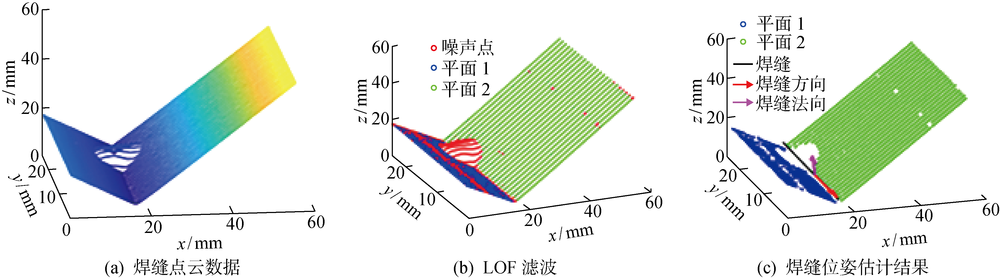
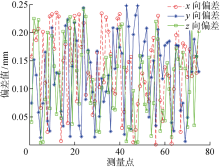
图12
焊缝位置估计偏差
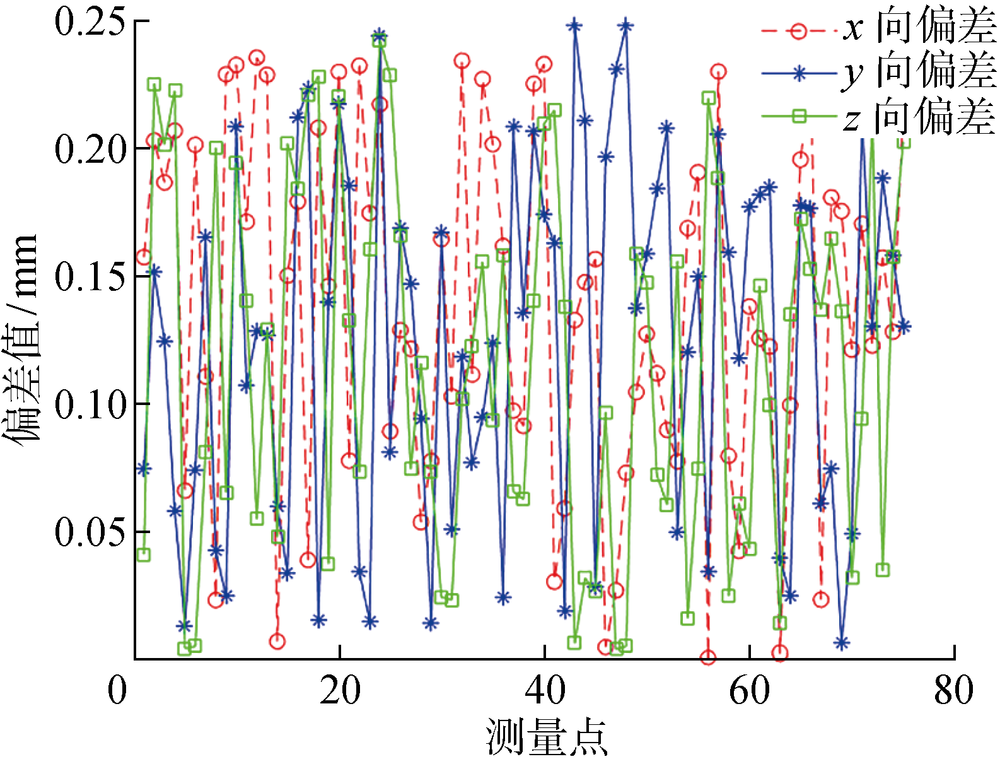
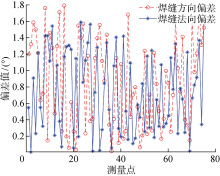
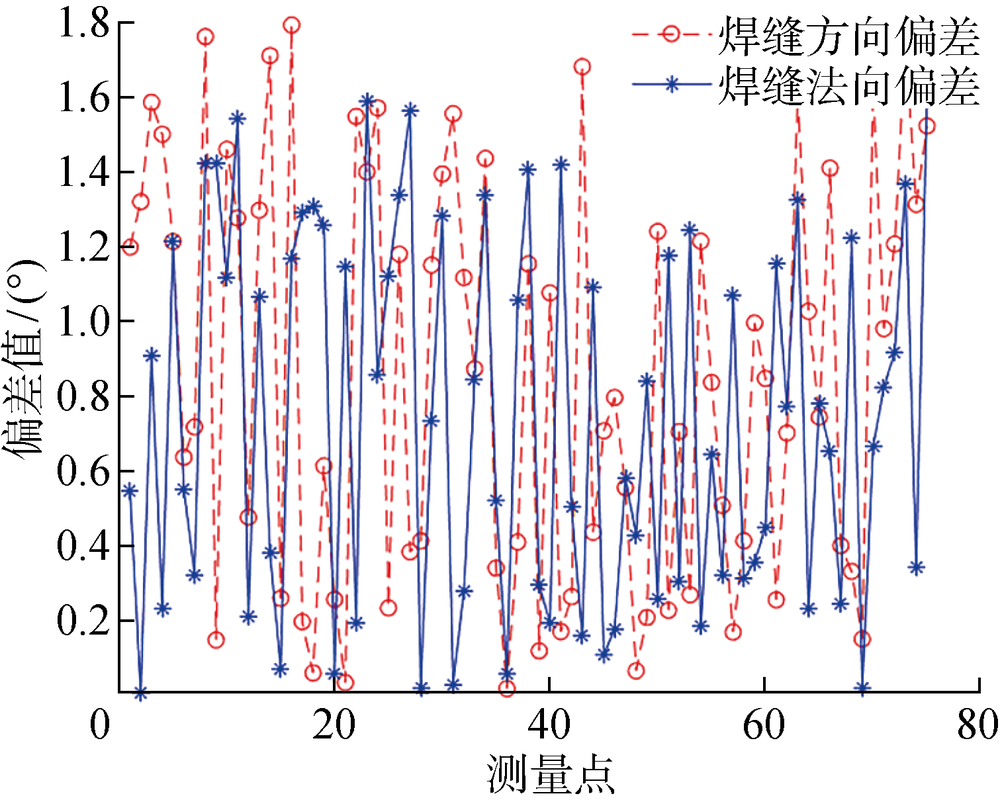
图13
焊缝姿态估计偏差
| [1] |
LI G Y, HONG Y X, GAO J P, et al. Welding seam trajectory recognition for automated skip welding guidance of a spatially intermittent welding seam based on laser vision sensor[J]. Sensors, 2020, 20(13): 3657.
doi: 10.3390/s20133657 URL |
| [2] |
ZOU Y B, CHEN J X, WEI X Z. Research on a real-time pose estimation method for a seam tracking system[J]. Optics and Lasers in Engineering, 2020, 127: 105947.
doi: 10.1016/j.optlaseng.2019.105947 URL |
| [3] |
XUE B C, CHANG B H, PENG G D, et al. A vision based detection method for narrow butt joints and a robotic seam tracking system[J]. Sensors, 2019, 19(5): 1144.
doi: 10.3390/s19051144 URL |
| [4] |
GAO X D, HUANG G X, YOU D Y, et al. Magneto-optical imaging deviation model of micro-gap weld joint[J]. Journal of Manufacturing Systems, 2017, 42: 82-92.
doi: 10.1016/j.jmsy.2016.11.005 URL |
| [5] | 乐健, 张华, 叶艳辉, 等. 基于旋转电弧传感机器人立焊焊缝的跟踪[J]. 上海交通大学学报, 2015, 49(3): 348-352. |
| LE Jian, ZHANG Hua, YE Yanhui, et al. Robot tracking of vertical welding seam based on rotating arc sensor[J]. Journal of Shanghai Jiao Tong University, 2015, 49(3): 348-352. | |
| [6] |
XIAO R Q, XU Y L, HOU Z, et al. An adaptive feature extraction algorithm for multiple typical seam tracking based on vision sensor in robotic arc welding[J]. Sensors and Actuators A: Physical, 2019, 297: 111533.
doi: 10.1016/j.sna.2019.111533 URL |
| [7] |
XU Y L, LV N, FANG G, et al. Welding seam tracking in robotic gas metal arc welding[J]. Journal of Materials Processing Technology, 2017, 248: 18-30.
doi: 10.1016/j.jmatprotec.2017.04.025 URL |
| [8] | ZOU Y B, WANG Y B, ZHOU W L, et al. Real-time seam tracking control system based on line laser visions[J]. Optics & Laser Technology, 2018, 103: 182-192. |
| [9] | 万家山, 陈蕾, 吴锦华, 等. 基于KD-Tree聚类的社交用户画像建模[J]. 计算机科学, 2019, 46(Sup.1): 442-445. |
| WAN Jiashan, CHEN Lei, WU Jinhua, et al. Persona based social user modeling using KD-tree[J]. Computer Science, 2019, 46(Sup.1): 442-445. | |
| [10] | 薛连杰, 齐臣坤, 张彪, 等. 基于3维点云欧氏聚类和RANSAC边界拟合的目标物体尺寸和方位识别[J]. 机械设计与研究, 2018, 34(5): 44-48. |
| XUE Lianjie, QI Chenkun, ZHANG Biao, et al. Object size and orientation recognition based on 3D point cloud euclideam clustering and RANSAC boundary fitting[J]. Machine Design & Research, 2018, 34(5): 44-48. | |
| [11] | 周鹏, 程艳云. 一种改进的LOF异常点检测算法[J]. 计算机技术与发展, 2017, 27(12): 115-118. |
| ZHOU Peng, CHENG Yanyun. An improved LOF outlier detection algorithm[J]. Computer Technology and Development, 2017, 27(12): 115-118. | |
| [12] | 郑健, 张轲, 罗志锋, 等. 基于空间直线约束的焊接机器人手眼标定[J]. 焊接学报, 2018, 39(8): 108-113. |
| ZHENG Jian, ZHANG Ke, LUO Zhifeng, et al. Hand-eye calibration of welding robot based on the constraint of spatial line[J]. Transactions of the China Welding Institution, 2018, 39(8): 108-113. |
| [1] | 刘轶玮1,华学明1,吴东升1,李芳1,蔡艳1,王欢2,杨修荣3. 使用ERNiCrMo-3焊丝进行9%镍钢短电弧脉冲熔化极气体保护焊横焊的电弧与熔滴行为研究[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(2): 361-376. |
| [2] | 吕超凡, 言颖杰, 林力, 柴岗, 鲍劲松. 基于点云语义分割算法的下颌角截骨面设计[J]. 上海交通大学学报, 2022, 56(11): 1509-1517. |
| [3] | 向月, 马国红, 朱小玲, 叶佳. 旁路电流对镁合金非熔化极气体保护焊接熔池及其残余应力的影响[J]. 上海交通大学学报, 2016, 50(10): 1569-1572. |
| [4] | 李凯, 齐晗, 高洪明, 李海超. 高速摄像系统在熔化极气体保护焊检测过程中的应用[J]. 上海交通大学学报, 2016, 50(10): 1545-1549. |
| [5] | 罗雨, 胡胜, 周灿丰, 张中亮, 陈仪平. 摆动频率对短路过渡电弧传感信号的影响[J]. 上海交通大学学报, 2016, 50(10): 1535-1539. |
| [6] | 顾玉芬, 何冠宇, 石玗, 何伟, 朱明. 窄间隙约束下熔化极气体保护焊的电弧形态和熔滴过渡分析[J]. 上海交通大学学报, 2016, 50(10): 1526-1529. |
| [7] | 冯静, 薛龙, 黄军芬, 刘宏, 谭谊诚. 高压环境下湿度对低碳钢熔化极气体保护焊焊接质量的影响[J]. 上海交通大学学报, 2016, 50(10): 1631-1634. |
| [8] | 刘宏, 薛龙, 黄继强, 黄军芬, 冯静, 谭谊诚. 环境压力对熔化极气体保护焊焊缝强度及韧性的影响[J]. 上海交通大学学报, 2016, 50(10): 1613-1617. |
| [9] | 吴东升, 华学明, 叶定剑, 张菁, 顾煜. 双丝共熔池熔化极气体保护焊熔池流动的数值模拟[J]. 上海交通大学学报, 2015, 49(10): 1435-1440. |
| [10] | 吴金明1,薛龙1,2,黄继强1,刘剑1,李兰2,徐雷3. 环境压力对熔化极气体保护焊焊接过程及焊缝成形的影响[J]. 上海交通大学学报(自然版), 2015, 49(03): 315-318. |
| [11] | 袁磊a, b, 华学明a, b, 张旺a, b, 李芳a, b, 吴毅雄a, b, c. 铝合金AC-P-MIG焊接电弧行为及熔滴过渡过程[J]. 上海交通大学学报(自然版), 2012, 46(07): 1092-1096. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||