上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (2): 149-160.doi: 10.16183/j.cnki.jsjtu.2020.047
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“工程力学”专题
张力文, 徐齐平, 刘锦阳( )
)
收稿日期:2020-02-20
出版日期:2021-02-01
发布日期:2021-03-03
通讯作者:
刘锦阳
E-mail:liujy@sjtu.edu.cn
作者简介:张力文(1997-),男,硕士生,四川省南充市人,研究方向为多体系统动力学.
基金资助:
ZHANG Liwen, XU Qiping, LIU Jinyang()
Received:2020-02-20
Online:2021-02-01
Published:2021-03-03
Contact:
LIU Jinyang
E-mail:liujy@sjtu.edu.cn
摘要:
高效计算并整体分析软体尺蠖机器人的运动规律和行进步态是个具有挑战性的难题.在准静态条件下,建立了一个由刚性滑块和曲梁构成的简化力学模型,对该类机器人进行准静态的建模与仿真分析.首先基于欧拉-伯努利梁理论,给出了曲梁的总势能表达式.其次,利用变分原理,由总势能推导出控制方程,联立边界条件,建立了常微分方程组,并对其进行离散化以及无量纲化,给出了用于数值求解的非线性代数方程组.然后,根据曲梁和地面的接触情况以及系统的黏滞与滑移状况,将机器人的整个运动过程分为三个阶段,通过数值计算,得到在不同阶段下曲梁随初始曲率幅值变化的不同构型,描述出软体机器人在一个周期内的运动规律、步态变化和净位移量,解决了软体机器人在不同阶段的运动衔接问题.准静态方法的特点是计算效率较高,更加适用于对软体机器人的运动构型进行分析.
中图分类号:
张力文, 徐齐平, 刘锦阳. 软体尺蠖爬行机器人建模与仿真分析[J]. 上海交通大学学报, 2021, 55(2): 149-160.
ZHANG Liwen, XU Qiping, LIU Jinyang. Modeling and Simulation of an Inchworm-Like Soft Robot[J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 149-160.

图1
软体尺蠖机器人


图2
滑块-曲梁模型
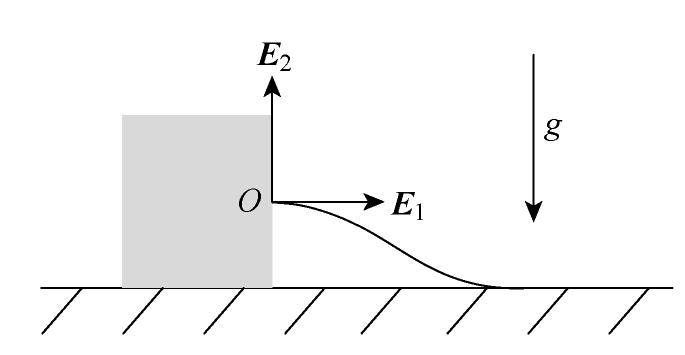
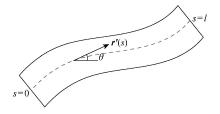
图3
切向量r′(s)
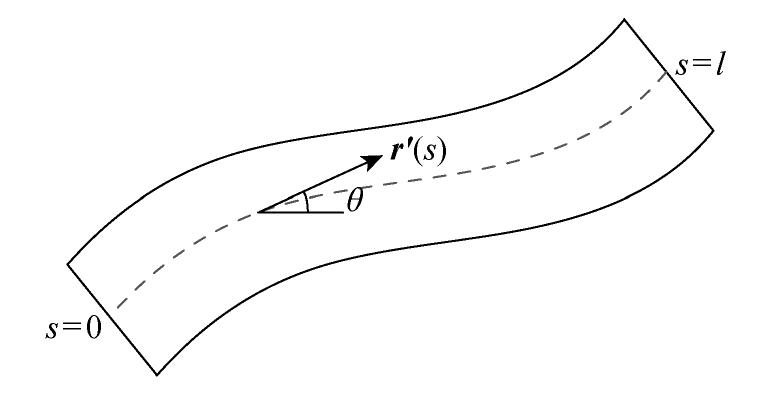
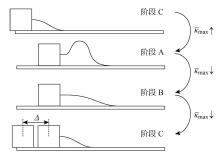
图4
一个运动周期内的三个阶段
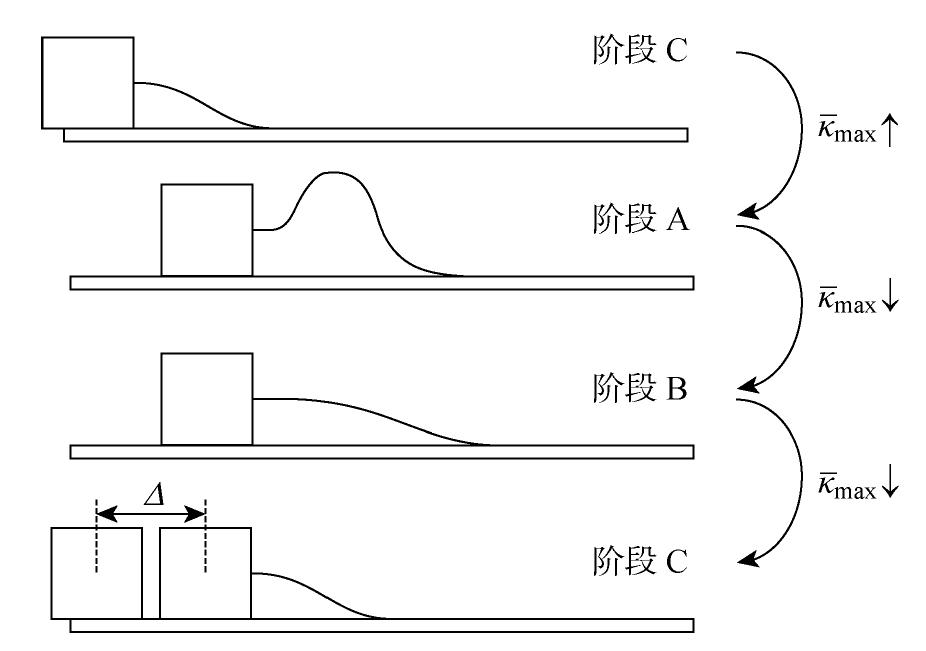
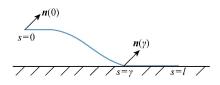
图5
曲梁和地面线接触时受外载荷的情况
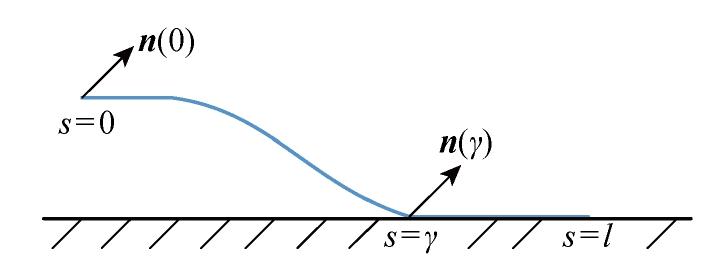
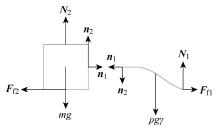
图6
阶段B中滑块-曲梁系统的静平衡分析
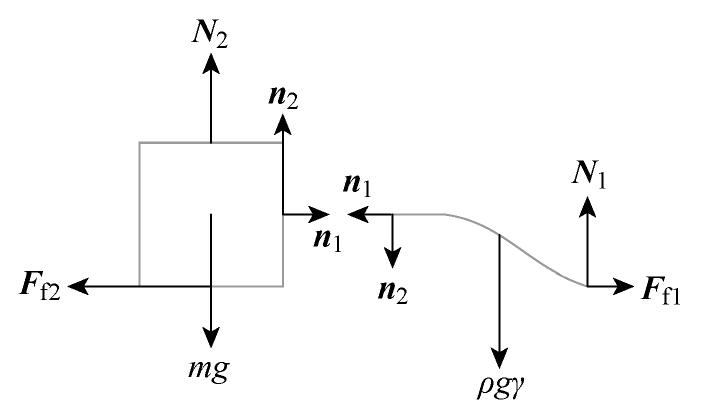

图7
阶段C中滑块-曲梁系统的静平衡分析
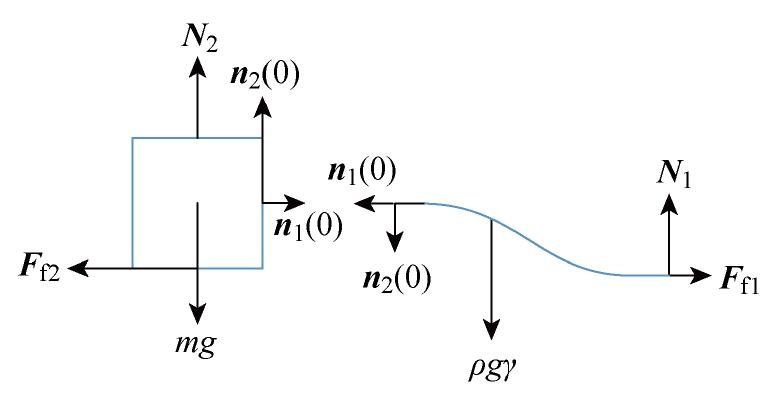

图8
曲梁和地面点接触时曲梁的离散构型
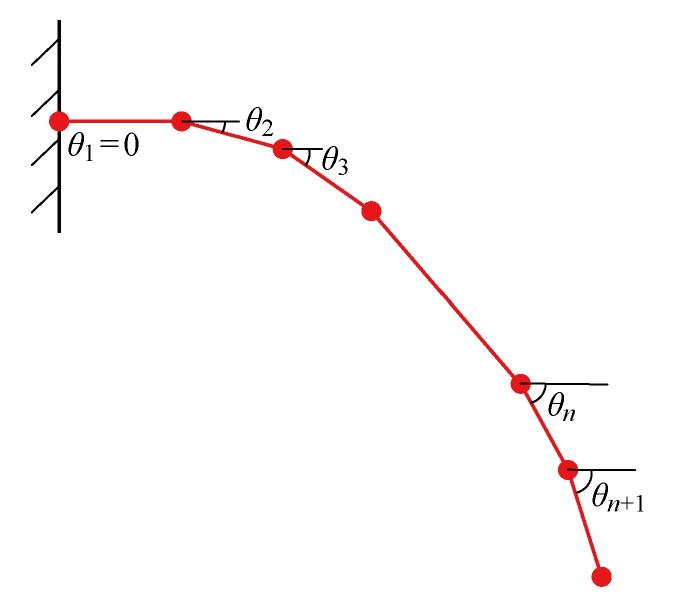

图9
曲梁和地面线接触时曲梁的离散构型
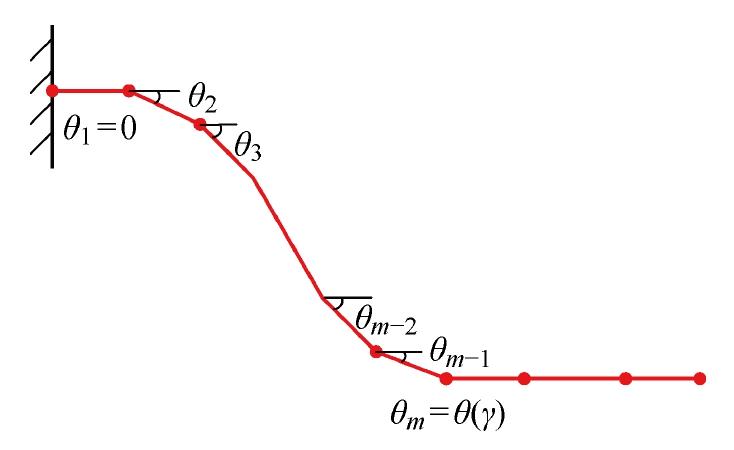
表1
各物理量的无量纲化
| 物理量 | 量纲 | 无量纲化 | 无量纲化物理量 |
|---|---|---|---|
| s,h,d,x,y,γ | L′ | s/l,h/l,d/l,x/l,y/l,γ/l |  |
| ms | FT2L′-1 | ms/ρl | Ms |
| EI | FL′2 | EI/ρgl | D |
| N1,Ff1 | F | N1/ρgl,Ff1/ρgl |  |
| ω | F | ω/ρgl | Wad |
| n2(γ),n1(γ) | F | n2(γ)/ρgl,n1(γ)/ρgl |  |
| κ0 | L′-1 |  |  |
 | L′-2 |  |  |
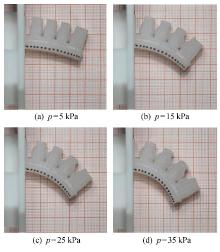
图10
受不同气压载荷作用的软体制动器的变形状态
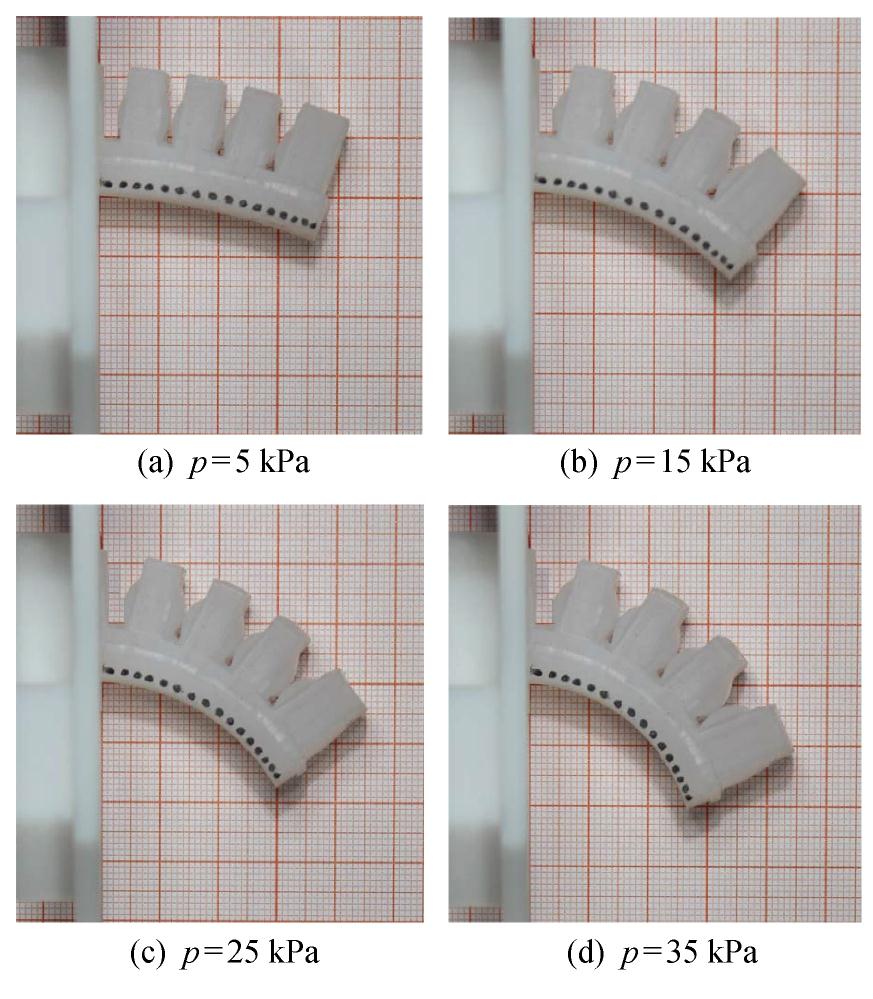

图11
实验和仿真得到的软体制动器变形状态的对比
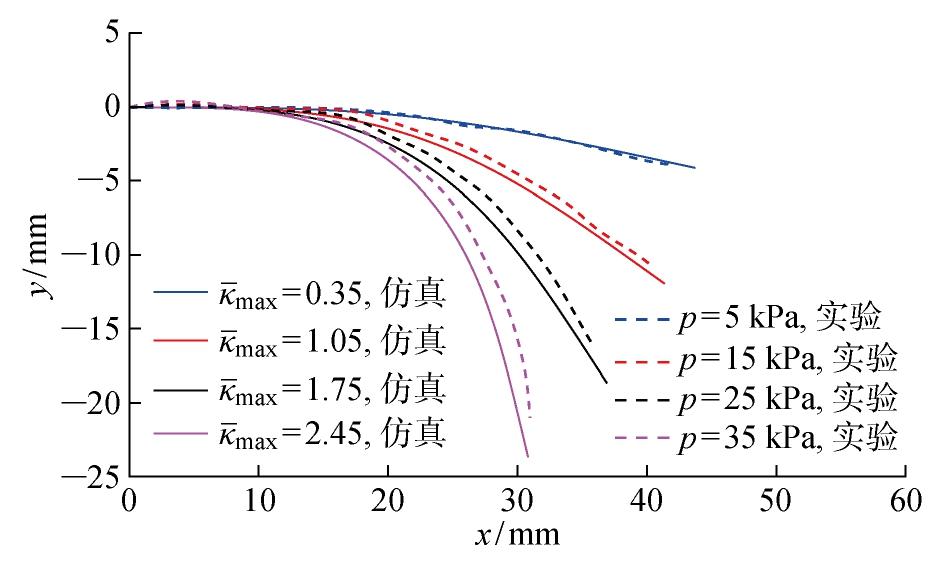
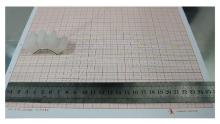
图12
实验过程中的软体机器人
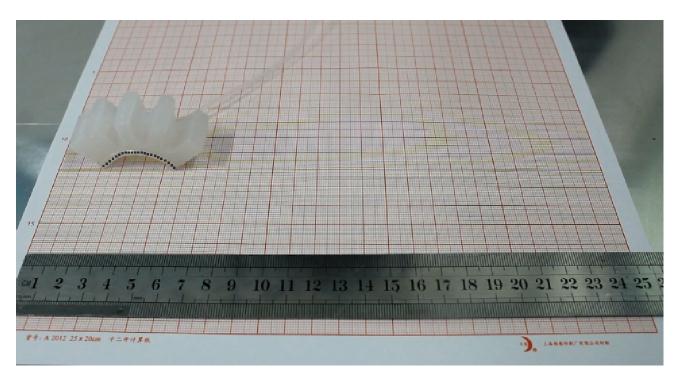
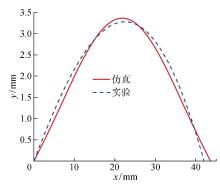
图13
t=2 s时软体机器人形状的实验和仿真结果

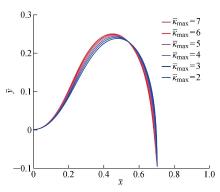
图14
阶段A在∈[2,7]上的构型图
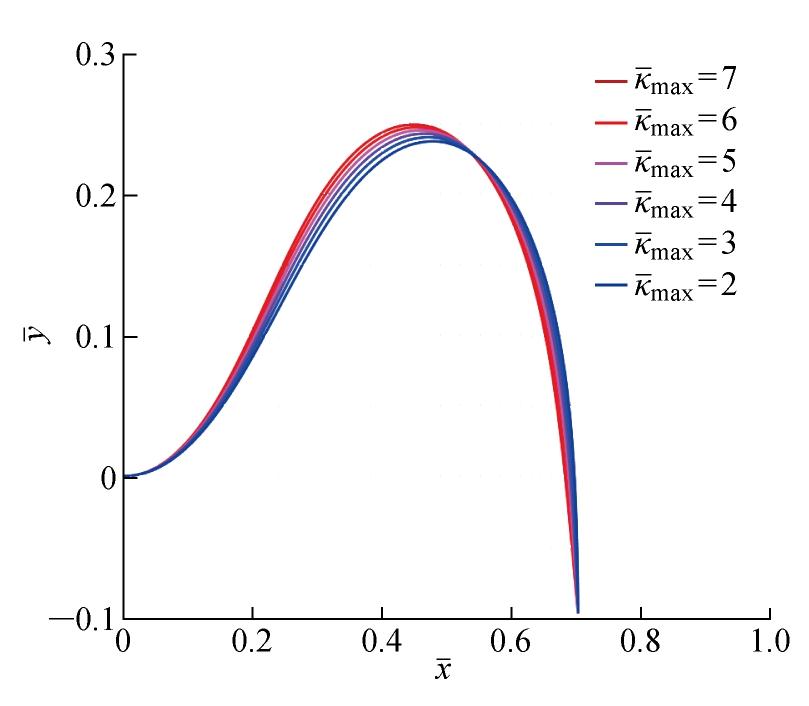
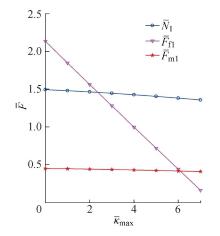
图15
阶段A中曲梁右端外力和的关系曲线

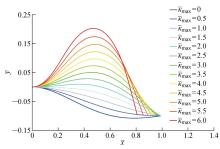
图16
阶段B在∈[0,6]上的构型图


图17
阶段B中滑块-曲梁系统外力绝对值和的关系曲线
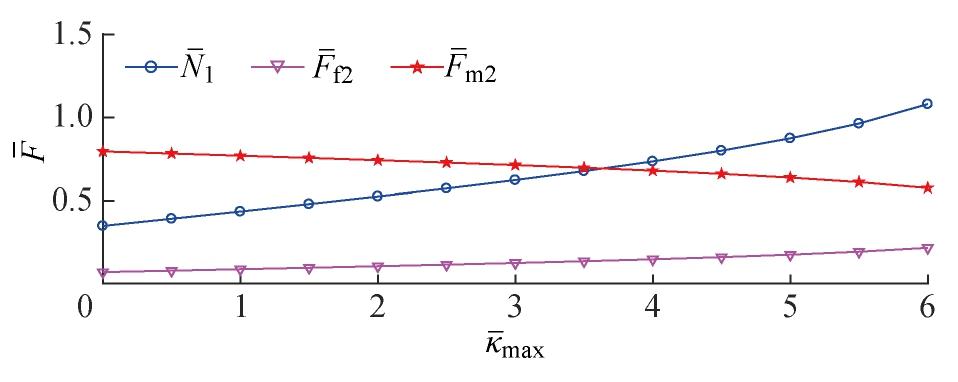

图18
阶段B中和的关系曲线
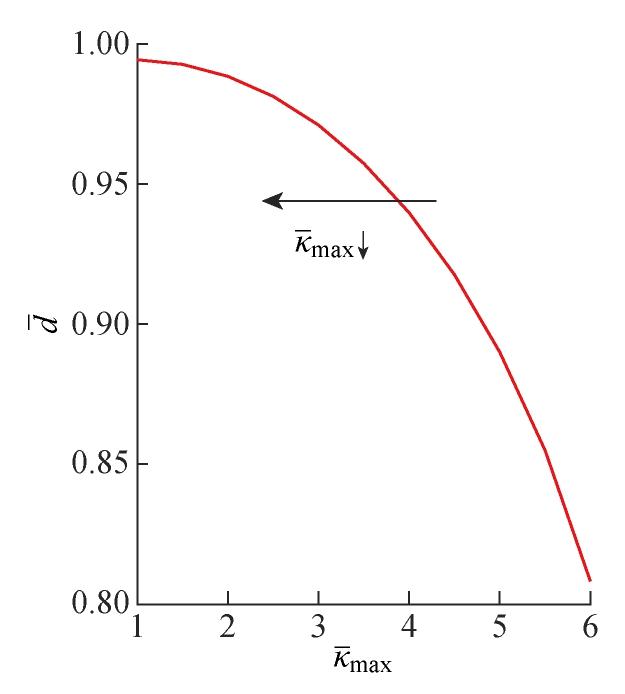
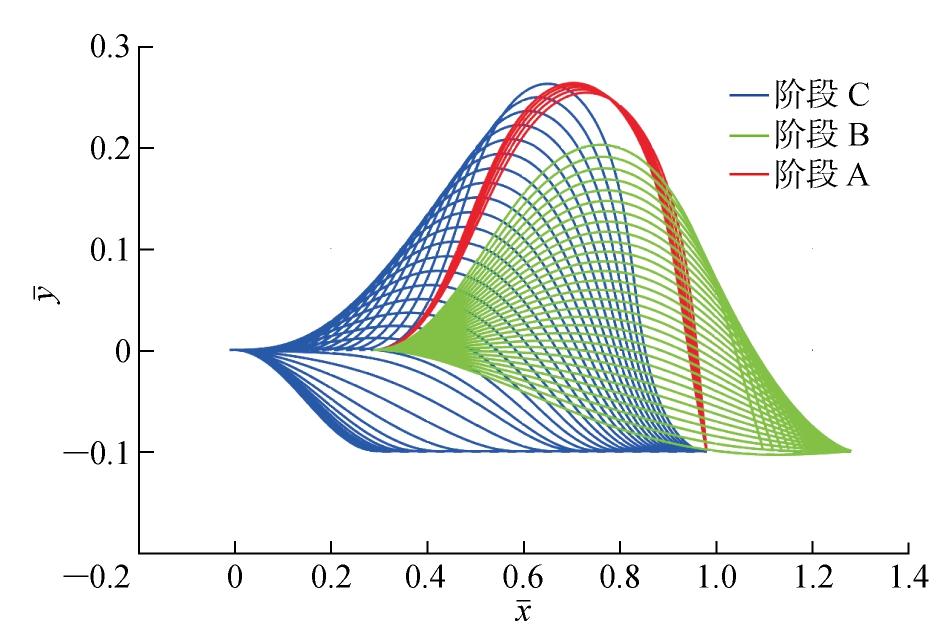
图19
阶段C在∈[0,17]上的构型图
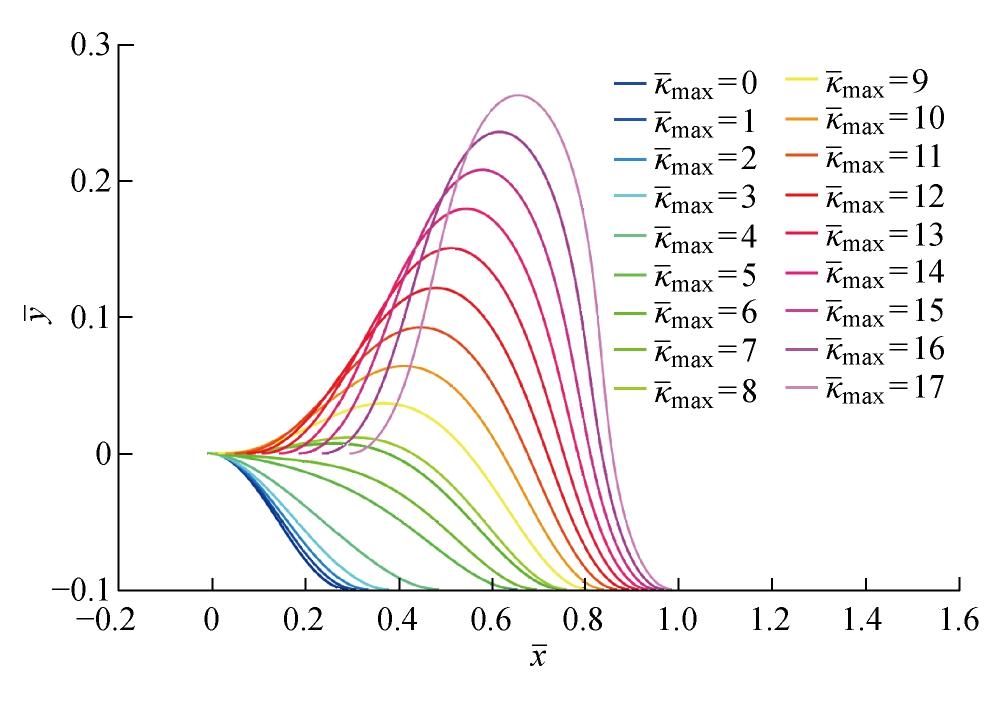

图20
滑块的位移和的关系曲线
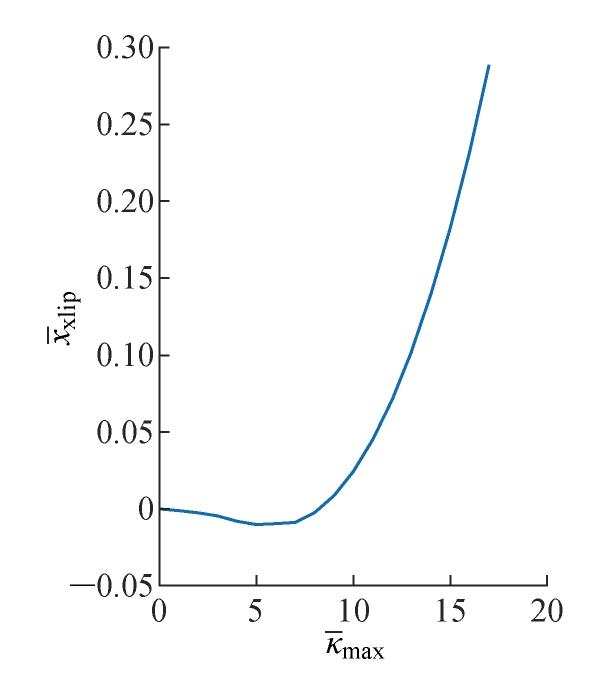
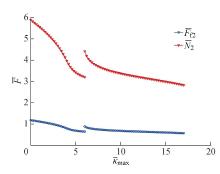
图21
阶段C中滑块处外力绝对值和的关系曲线
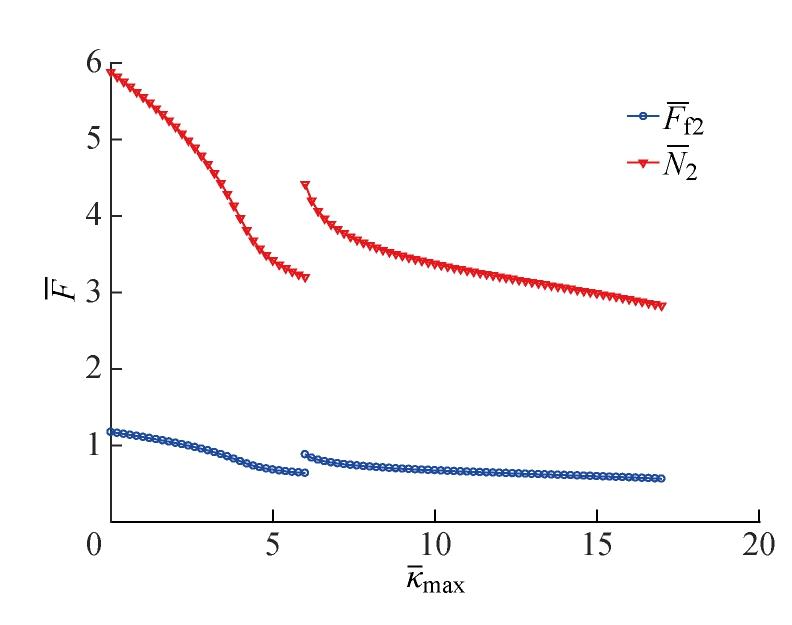
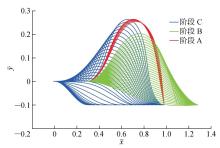
图22
曲梁在整个运动周期内的构型变化
| [1] | 胡兵兵,金国庆. 一种仿虎甲幼虫的多驱动器软体机器人的设计与制造[J]. 机器人,2018, 40(5): 52-59. |
| HU Bingbing, JIN Guoqing. Design and fabrication of a multi-actuator soft robot inspired by young tiger beetle[J]. Robot, 2018, 40(5): 52-59. | |
| [2] | 费燕琼,吕海洋,沈星尧. 模块化软体机器人运动模式[J]. 上海交通大学学报,2013, 47(12): 1870-1873. |
| FEI Yanqiong, LV Haiyang, SHEN Xingyao. Moving mode of modular soft robot[J]. Journal of Shanghai Jiao Tong University, 2013, 47(12): 1870-1873. | |
| [3] | 张润玺,王贺升,陈卫东. 仿章鱼软体机器人形状控制[J]. 机器人,2016, 38(6): 754-759. |
| ZHANG Runxi, WANG Hesheng, CHEN Weidong. Shape control for a soft robot inspired by octopus[J]. Robot, 2016, 38(6): 754-759. | |
| [4] | LI C, XIE Y, HUANG X, et al. Novel dielectric elastomer structure of soft robot[J]. Proceedings of SPIE-The International Society for Optical Engineering, 2015, 9430: 943021. |
| [5] | RAFSANJANI A, ZHANG Y, LIU B, et al. Kirigami skins make a simple soft actuator crawl[J]. Science Robotics, 2018, 3(15): 7555. |
| [6] | 邵城. 环纵肌复合的气动仿蠕虫软体机器人技术研究[D]. 南京: 南京理工大学,2018. |
| SHAO Cheng. Development of the pneumatic-driven earthworm-like soft robot with circular-longitudinal compound muscles[D]. Nanjing: Nanjing University of Science and Technology, 2018. | |
| [7] | SUZUMORI K, ENDO S, KANDA T, et al. A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot[C]∥Proceedings 2007 IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2007: 4975-4980. |
| [8] | MAO S X, DONG E B, JIN H, et al. Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by SMAs[J]. Journal of Bionic Engineering, 2014, 11(3): 400-411. |
| [9] | BARTLETT N W, TOLLEY M T, OVERVELDE J T B, et al. A 3D-printed, functionally graded soft robot powered by combustion[J]. Science, 2015, 349(6244): 161-165. |
| [10] | CIANCHETTI M, CALISTI M, MARGHERI L, et al. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot[J]. Bioinspiration & Biomimetics, 2015, 10(3): 035003. |
| [11] | MARCHESE A D, ONAL C D, RUS D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators[J]. Soft Robotics, 2014, 1(1): 75-87. |
| [12] | LIN H T, LEISK G G, TRIMMER B. GoQBot: A caterpillar-inspired soft-bodied rolling robot[J]. Bioinspiration & Biomimetics, 2011, 6(2): 026007. |
| [13] | JUNG K, KOO J C, NAM J D, et al. Artificial annelid robot driven by soft actuators[J]. Bioinspiration & Biomimetics, 2007, 2(2): S42-S49. |
| [14] | 王江北,方晔阳,童歆,等. 多气囊仿生软体机器人设计及其运动特性分析[J]. 上海交通大学学报,2018, 52(1): 20-25. |
| WANG Jiangbei, FANG Yeyang, TONG Xin, et al. Design and locomotion properties of a multi-airbag bionic soft robot[J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 20-25. | |
| [15] | SHEPHERD R F, ILIEVSKI F, CHOI W, et al. Multigait soft robot[J]. PNAS, 2011, 108(51): 20400-20403. |
| [16] | TOLLEY M T, SHEPHERD R F, MOSADEGH B, et al. A resilient, untethered soft robot[J]. Soft Robotics, 2014, 1(3): 213-223. |
| [17] | MAJIDI C, O’REILLY O M, WILLIAMS J A. On the stability of a rod adhering to a rigid surface: Shear-induced stable adhesion and the instability of peeling[J]. Journal of the Mechanics and Physics of Solids, 2012, 60(5): 827-843. |
| [18] | MAJIDI C, O’REILLY O M, WILLIAMS J A. Bifurcations and instability in the adhesion of intrinsically curved rods[J]. Mechanics Research Communications, 2013, 49: 13-16. |
| [19] | MAJIDI C, SHEPHERD R F, KRAMER R K, et al. Influence of surface traction on soft robot undulation[J]. The International Journal of Robotics Research, 2013, 32(13): 1577-1584. |
| [20] | ZHOU X C, MAJIDI C, O’REILLY O M. Flexing into motion: A locomotion mechanism for soft robots[J]. International Journal of Non-Linear Mechanics, 2015, 74: 7-17. |
| [21] | DE PAYREBRUNE K M, O’REILLY O M. On constitutive relations for a rod-based model of a pneu-net bending actuator[J]. Extreme Mechanics Letters, 2016, 8: 38-46. |
| [22] | MATIA Y, GAT A D. Dynamics of elastic beams with embedded fluid-filled parallel-channel networks[J]. Soft Robotics, 2015, 2(1): 42-47. |
| [23] | POLYGERINOS P, LYNE S, WANG Z, et al. Towards a soft pneumatic glove for hand rehabilitation[C]∥2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2013: 1512-1517. |
| [1] | . 基于EEPPO的四足机器人步态学习方法复现[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1125-1133. |
| [2] | 黄俊洋, 杨博文, 贾军, 陈金宝, 刘燕斌, 陈柏屹. 变构型滑翔飞行器火星进入轨迹设计[J]. 空天防御, 2025, 8(4): 104-112. |
| [3] | 杨建东, 赵文文, 李晓龙, 殷玮, 刘伟, 蔡克荣. 变构型技术在临近空间高速飞行器中的应用前景及挑战[J]. 空天防御, 2025, 8(4): 38-45. |
| [4] | 贺贵松,黄学功,李峰. 基于主被动联合驱动的助力型踝关节外骨骼机器人的协调性设计[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 197-208. |
| [5] | 徐齐平, 刘锦阳. 多腔体气动软体致动器的建模与仿真[J]. 上海交通大学学报, 2020, 54(6): 551-561. |
| [6] | 张氢,陈淼,孙峰,秦仙蓉,孙远韬. 基于再生运动链法的大车行走机构创新设计[J]. 上海交通大学学报, 2019, 53(12): 1466-1474. |
| [7] | 王宾, 李红涛, 唐广银. 海上浮式风机研究进展概述[J]. 海洋工程装备与技术, 2018, 5(增刊): 220-225. |
| [8] | 杨振,付庄,管恩广,徐建南,田仕禾,郑辉. MLattice模块机器人的运动学分析及构型优化[J]. 上海交通大学学报, 2017, 51(10): 1153-1159. |
| [9] | 陈宇峰,陈务军,邱振宇. 柔性飞艇主气囊不稳定构型阶段力学性能分析[J]. 上海交通大学学报(自然版), 2015, 49(09): 1422-1428. |
| [10] | 杨其,赵海涛,王全保,陈吉安,龚德仁. 索网蒙皮结构超压气球的设计与分析[J]. 上海交通大学学报(自然版), 2015, 49(09): 1411-1415. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||