上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (10): 1310-1319.doi: 10.16183/j.cnki.jsjtu.2020.240
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
齐东润, 陈刚( )
)
收稿日期:2020-07-29
出版日期:2021-10-28
发布日期:2021-11-01
通讯作者:
陈刚
E-mail:gang0418@163.com
作者简介:齐东润(1995-),男,河北省石家庄市人,硕士生,研究方向为汽车自动驾驶技术.
基金资助:
QI Dongrun, CHEN Gang()
Received:2020-07-29
Online:2021-10-28
Published:2021-11-01
Contact:
CHEN Gang
E-mail:gang0418@163.com
摘要:
为了实现不同曲率路径下无人驾驶机器人对车辆的平稳操纵,提出一种基于多目标模糊决策的无人驾驶机器人操纵控制策略.首先,建立驾驶机器人和车辆的集成动力学模型,接着提出横摆角速度生成方法和多目标模糊决策协调操纵策略.其中,横摆角速度生成方法根据试验要求车速和路径生成参考横摆角速度,多目标模糊决策协调操纵调整策略以当前车速生成目标车速和目标横摆角速度集合,并在多约束条件下对集合内的方案进行决策,选出最优方案作为下一时刻的目标车速和目标横摆角速度.试验与仿真结果验证了所提操纵策略的有效性.
中图分类号:
齐东润, 陈刚. 无人驾驶机器人多目标模糊操纵策略[J]. 上海交通大学学报, 2021, 55(10): 1310-1319.
QI Dongrun, CHEN Gang. Multi-Object Fuzzy Control Strategy of Unmanned Driving Robot[J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1310-1319.
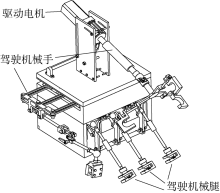
图1
驾驶机器人整体结构
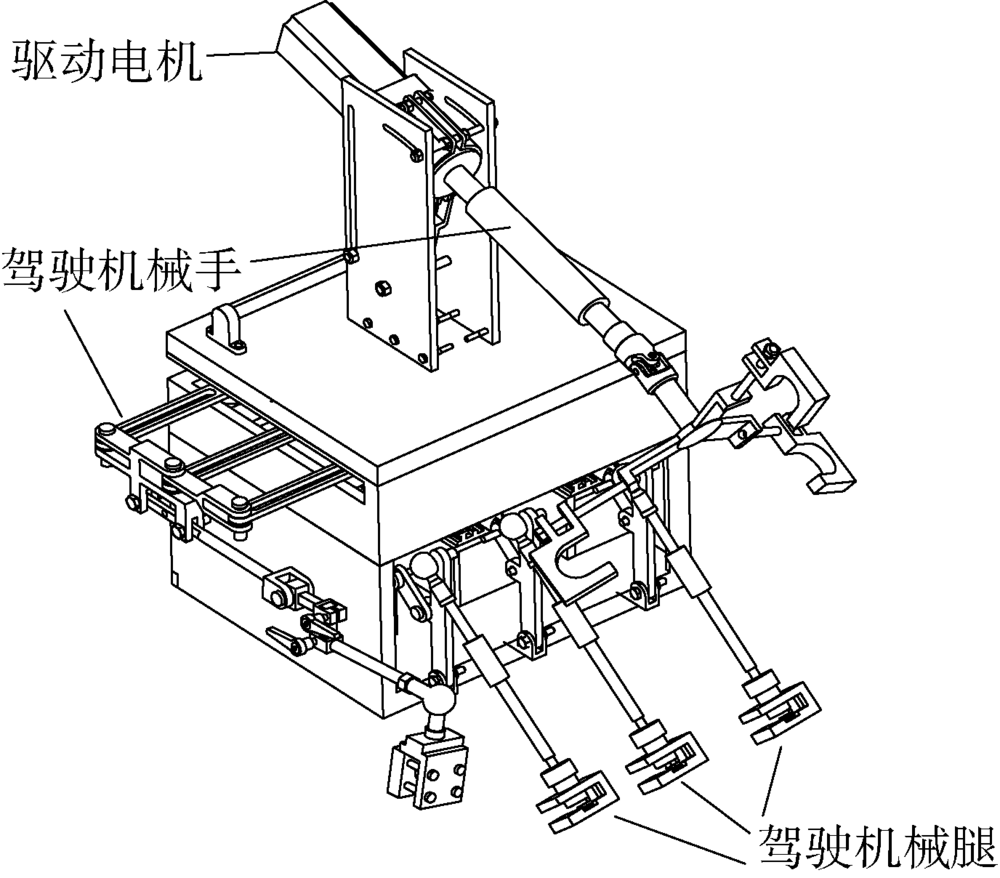

图2
驾驶机械腿驱动电机矢量控制系统结构图
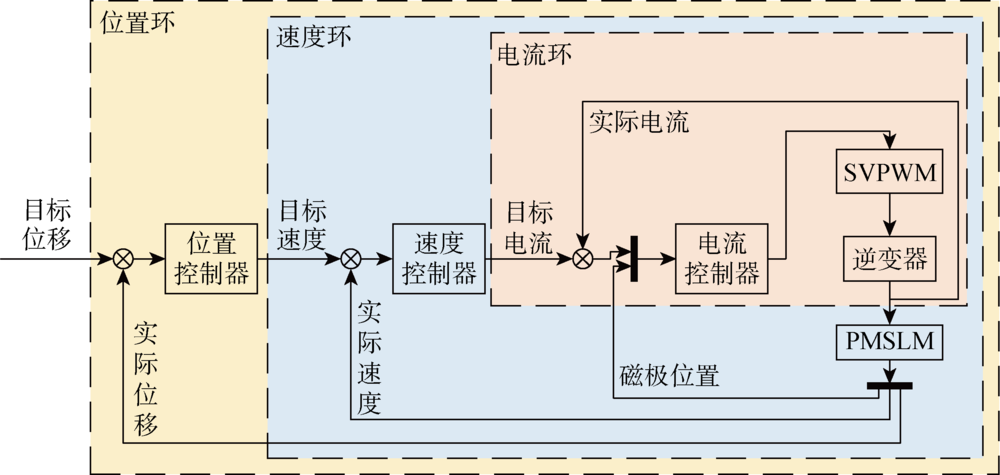

图3
转向机械手结构简图
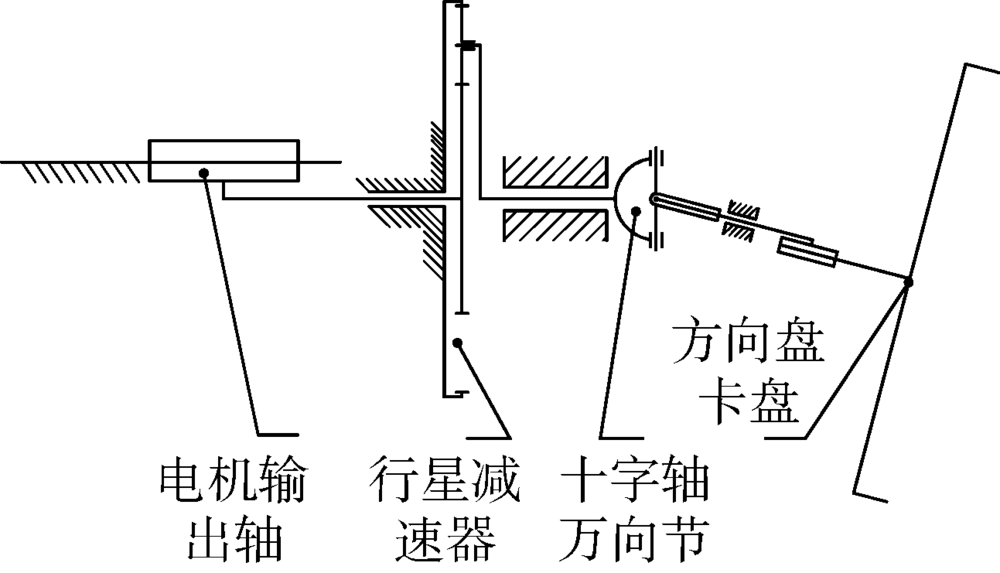
图4
驾驶机械腿结构简图
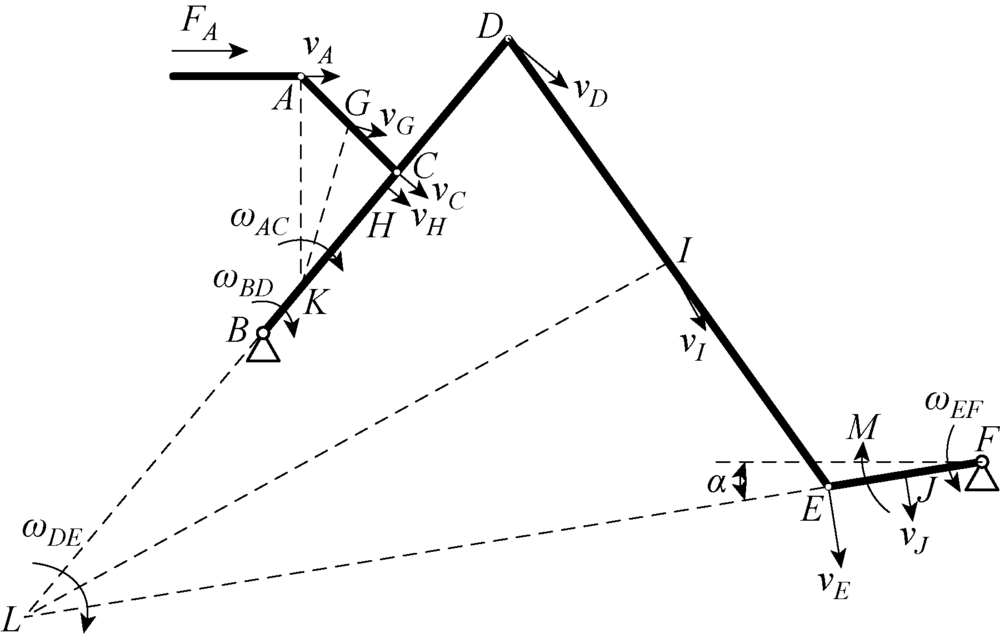
图5
试验车辆在坐标系中的位置
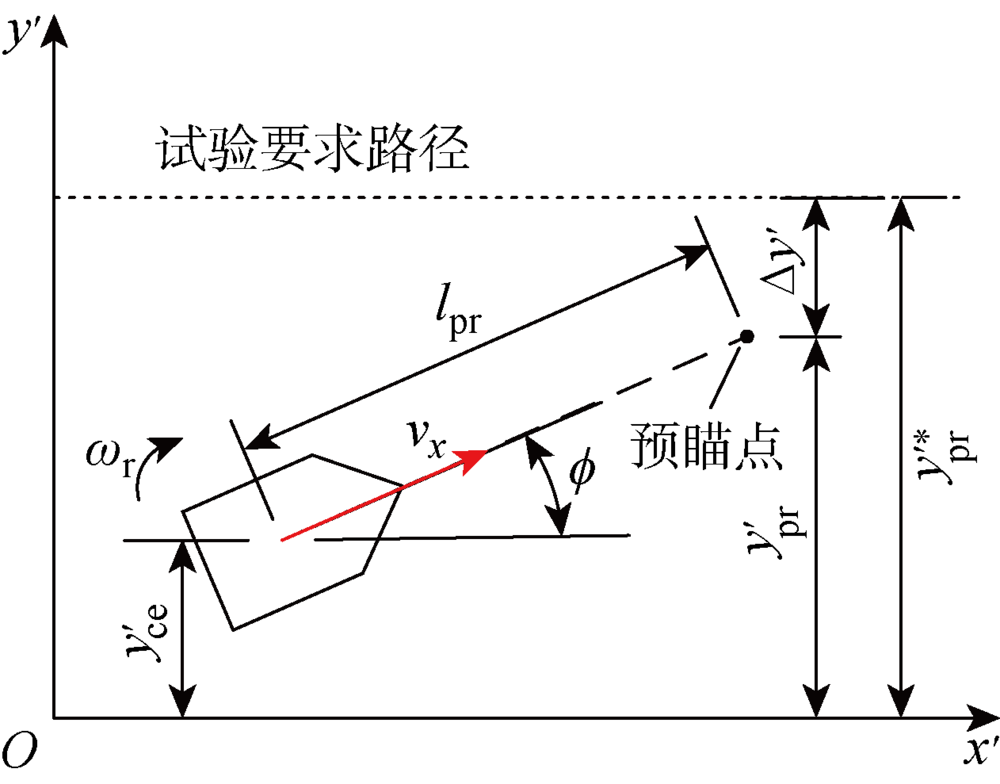
表1
试验车辆横向与纵向加速度分级[17]
| 评价 | ay/(m·s-2) | ax/(m·s-2) | a'x/(m·s-2) |
|---|---|---|---|
| 好 | ≤1.5 | ≤0.9 | ≤1.3 |
| 一般 | 1.5~3.0 | 0.9~1.2 | 1.3~2.5 |
| 差 | ≥3.0 | ≥1.2 | ≥2.5 |

图6
UDR多目标模糊操纵策略结构图


图7
驾驶机器人安装图

表2
试验车辆关键参数
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| Ltm/H | 0.0008 | Rtm/Ω | 0.075 |
| Ctme/(V·s·rad-1) | 0.085 | Ctmm | 1 |
| Jtm/(kg·s2) | 0.0005 | Js/(kg·s2) | 2 |
| ζ/m | 0.035 | m/kg | 1120 |
| Cd | 0.35 | k1/(N·rad-1) | -50000 |
| k2/(N·rad-1) | -70000 | la/m | 1.07 |
| lb/m | 1.47 | Jz/(kg·s2) | 2697 |
| i0 | 15 | is | 20 |
| Ta | 1.3 | Tb | 0.8 |
| ka | 1.2 | kb | 0.8 |
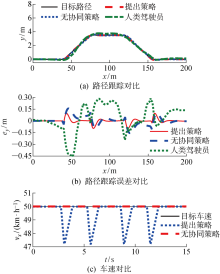
图8
双移线工况试验结果对比
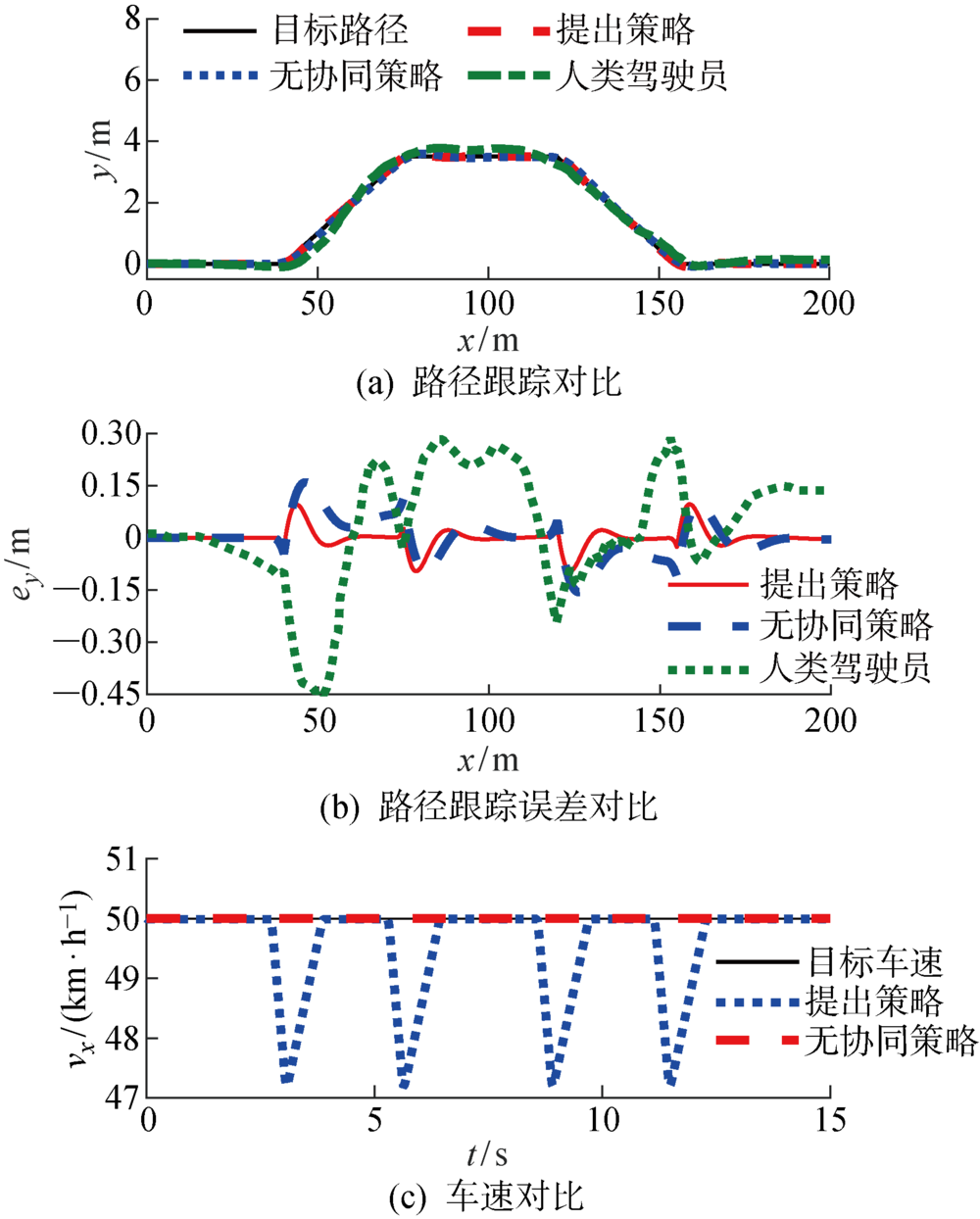

图9
不同曲率路径的路径跟踪试验结果对比
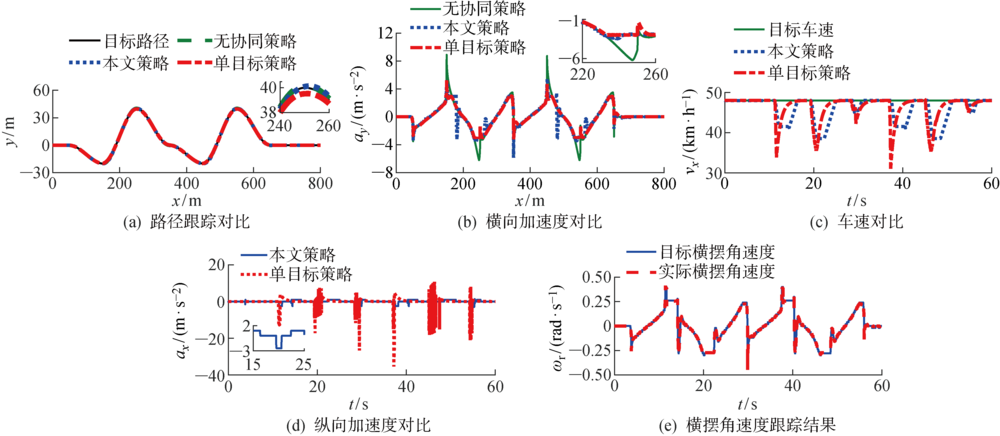
表3
路径跟踪误差的MAE
| 路径类型 | eey/m | ||
|---|---|---|---|
| 所提策略 | 无协同策略 | 单目标策略 | |
| 双移线路径 | 0.0149 | 0.0383 | — |
| 多曲率路径 | 0.0530 | 0.0766 | 0.0780 |
表4
车辆加速度分段最大值
| 路径分段 | a'x/(m·s-2) | ax/(m·s-2) | ay/(m·s-2) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 所提策略 | 单目标策略 | 所提策略 | 单目标策略 | 所提策略 | 单目标策略 | 无协同策略 | ||||
| 路段1 | 1.50 | 0 | 0.91 | 0 | 3.43 | 3.40 | 5.53 | |||
| 路段2 | 2.50 | 35.45 | 1.00 | 4.50 | 5.41 | 5.22 | 8.89 | |||
| 路段3 | 2.50 | 18.46 | 1.00 | 10.77 | 3.48 | 3.01 | 6.19 | |||
| 路段4 | 3.05 | 26.70 | 1.33 | 8.05 | 3.07 | 3.00 | 3.51 | |||
| [1] |
CHEN G, CHEN S B, LANGARI R, et al. Driver-behavior-based adaptive steering robust nonlinear control of unmanned driving robotic vehicle with modeling uncertainties and disturbance observer[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8):8183-8190.
doi: 10.1109/TVT.25 URL |
| [2] | 吴俊, 陈刚. 驾驶机器人车辆的多模式切换控制[J]. 汽车工程, 2018, 40(10):1215-1222. |
| WU Jun, CHEN Gang. Multi-mode switching control for robot driven vehicles[J]. Automotive Engineering, 2018, 40(10):1215-1222. | |
| [3] | 顾爱博, 陈刚. 驾驶机器人车辆多新息动态转向力矩补偿[J]. 西安交通大学学报, 2020, 54(7):43-51. |
| GU Aibo, CHEN Gang. Multi-innovation based dynamic steering torque compensation for driving robot vehicle[J]. Journal of Xi’an Jiaotong University, 2020, 54(7):43-51. | |
| [4] |
CHEN G, ZHANG W G. Hierarchical coordinated control method for unmanned robot applied to automotive test[J]. IEEE Transactions on Industrial Electronics, 2016, 63(2):1039-1051.
doi: 10.1109/TIE.2015.2477266 URL |
| [5] |
ZHU Y H, FU Z Y, FU Z, et al. Multi-features fusion for fault diagnosis of pedal robot using time-speed signals[J]. Sensors, 2019, 19(1):163.
doi: 10.3390/s19010163 URL |
| [6] | 杨琼琼, 孔斌, 朱勇军. 辅助实现机器人驾驶车辆的研究与仿真[J]. 计算机系统应用, 2014, 23(12):154-159. |
| YANG Qiongqiong, KONG Bin, ZHU Yongjun. Research and simulation of assist robot driving vehicle[J]. Computer Systems & Applications, 2014, 23(12):154-159. | |
| [7] | HIRATA N, MIZUTANI N, MATSUI H, et al. Fuel consumption in a driving test cycle by robotic driver considering system dynamics[C]// 2015 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2015: 3374-3379. |
| [8] |
WONG N, CHAMBERS C, STOL K, et al. Development of a robotic driver for autonomous vehicle following[J]. International Journal of Intelligent Systems Technologies and Applications, 2010, 8(1/2/3/4):276-287.
doi: 10.1504/IJISTA.2010.030205 URL |
| [9] | WONG N, CHAMBERS C, STOL K, et al. Autonomous vehicle following using a robotic driver[C]// 15th International Conference on Mechatronics and Machine Vision in Practice. Piscataway, NJ, USA: IEEE, 2008: 115-120. |
| [10] | 汪若尘, 魏振东, 叶青, 等. 视觉预瞄式智能车辆纵横向协同控制研究[J]. 汽车工程, 2019, 41(7):763-770. |
| WANG Ruochen, WEI Zhendong, YE Qing, et al. A research on visual preview longitudinal and lateral cooperative control of intelligent vehicle[J]. Automotive Engineering, 2019, 41(7):763-770. | |
| [11] | 蔡英凤, 李健, 孙晓强, 等. 智能汽车路径跟踪混合控制策略研究[J]. 中国机械工程, 2020, 31(3):289-298. |
| CAI Yingfeng, LI Jian, SUN Xiaoqiang, et al. Research on hybrid control strategy for intelligent vehicle path tracking[J]. China Mechanical Engineering, 2020, 31(3):289-298. | |
| [12] | 曹阳, 贺登博, 喻凡, 等. 基于主动转向的车辆路径跟随广义预测控制[J]. 上海交通大学学报, 2016, 50(3):401-406. |
| CAO Yang, HE Dengbo, YU Fan, et al. Generalized predictive control based on vehicle path following strategy by using active steering system[J]. Journal of Shanghai Jiao Tong University, 2016, 50(3):401-406. | |
| [13] | 章军辉, 李庆, 陈大鹏. 仿驾驶员多目标决策自适应巡航鲁棒控制[J]. 控制理论与应用, 2018, 35(6):769-777. |
| ZHANG Junhui, LI Qing, CHEN Dapeng. Drivers imitated multi-objective adaptive cruise control algorithm[J]. Control Theory & Applications, 2018, 35(6):769-777. | |
| [14] | 赵树恩, 冷姚, 邵毅明. 车辆多目标自适应巡航显式模型预测控制[J]. 交通运输工程学报, 2020, 20(3):206-216. |
| ZHAO Shu’en, LENG Yao, SHAO Yiming. Explicit model predictive control of multi-objective adaptive cruise of vehicle[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3):206-216. | |
| [15] |
RAKSINCHAROENSAK P, NAGAI M S, SHINO M. Lane keeping control strategy with direct yaw moment control input by considering dynamics of electric vehicle[J]. Vehicle System Dynamics, 2006, 44(Sup.1):192-201.
doi: 10.1080/00423110600870006 URL |
| [16] | 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 中华人民共和国国家标准: 机动车运行安全技术条件. GB 7258—2017[S]. 北京: 中国质量标准出版传媒有限公司, 2017. |
| General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China. Standardization Administration of the People’s Republic of China. National Standard of the People’s Republic of China: Technical specifications for safety of power-driven vehicles operating on roads. GB 7258—2017[S]. Beijing: China Quality and Standards Publishing & Media Co., Ltd., 2017. | |
| [17] | 高建平, 郭忠印. 基于运行车速的公路线形设计质量评价[J]. 同济大学学报(自然科学版), 2004, 32(7):906-911. |
| GAO Jianping, GUO Zhongyin. Evaluation of highway alignment design quality based on operating speed[J]. Journal of Tongji University, 2004, 32(7):906-911. | |
| [18] | 尹念东. 汽车—驾驶员—环境闭环系统操纵稳定性虚拟试验技术的研究[D]. 北京: 中国农业大学, 2001: 70-74. |
| YIN Niandong. Study of virtual experiment on handling behavior of driver-vehicle-environment closed-loop system[D]. Beijing: China Agricultural University, 2001: 70-74. | |
| [19] | International Organization for Standardization (ISO). Passenger cars—Test track for a serve lane-change manoeuvre—Part 1: Double lane-change: ISO 3888-1: 2018(E)[S]. Switzerland: ISO, 2018: 1-3. |
| [1] | 姜俊豪, 陈刚. 驾驶机器人转向操纵的动态模型预测控制方法[J]. 上海交通大学学报, 2022, 56(5): 594-603. |
| [2] | 郝虹斐1,郭伟1,桂林2,王磊1. 非完美维修情境下的预防性维修多目标决策模型[J]. 上海交通大学学报, 2018, 52(5): 518-524. |
| [3] | 全林1, 陈国庆2. 集装箱枢纽港陆向供应链规划模型[J]. 上海交通大学学报(自然版), 2011, 45(12): 1819-1923. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||