上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (10): 1618-1628.doi: 10.16183/j.cnki.jsjtu.2023.086
赖国良1,2, 胡钊政1,2( ), 周哲2,3, 万金杰1,2, 任靖渊1,2
), 周哲2,3, 万金杰1,2, 任靖渊1,2
收稿日期:2023-03-09
修回日期:2023-04-10
接受日期:2023-04-13
出版日期:2024-10-28
发布日期:2024-11-01
通讯作者:
胡钊政,教授,博士生导师;E-mail:作者简介:赖国良(1998—),硕士生,从事智能车辆定位研究.
基金资助:
LAI Guoliang1,2, HU Zhaozheng1,2(), ZHOU Zhe2,3, WAN Jinjie1,2, REN Jingyuan1,2
Received:2023-03-09
Revised:2023-04-10
Accepted:2023-04-13
Online:2024-10-28
Published:2024-11-01
摘要:
车载传感器数据与高精度地图的精确匹配是提升智能车辆感知与定位的关键.提出基于语义似然模型(SLM)的高精度地图匹配新算法,实现智能车辆同时定位与目标检测任务.首先通过U-Net提取路面语义目标,利用核密度估计建立SLM.基于粒子滤波框架,利用位姿变换将高精度地图上目标抽样点映射至SLM中,计算该抽样点与传感器数据的匹配程度对每个粒子的权重更新,实现智能车辆的高精度定位.最后利用定位结果完成地图上的要素目标到图像的映射,实现目标的精准检测.利用在校园道路与城市道路环境下采集的数据对所提算法进行验证,实验结果表明,算法的平均定位误差约为14 cm,路面路标检测结果平均交并比(MIoU)均大于80.较之深度神经网络等当前最佳(SOTA)的检测方法,所提算法引入高精度地图的先验信息可显著提升智能车辆定位与目标检测性能.
中图分类号:
赖国良, 胡钊政, 周哲, 万金杰, 任靖渊. 基于语义似然与高精度地图匹配的智能车辆同时定位与检测[J]. 上海交通大学学报, 2024, 58(10): 1618-1628.
LAI Guoliang, HU Zhaozheng, ZHOU Zhe, WAN Jinjie, REN Jingyuan. Simultaneous Detection and Localization for Intelligent Vehicles Based on HD Map Matching and Semantic Likelihood Model[J]. Journal of Shanghai Jiao Tong University, 2024, 58(10): 1618-1628.

图1
算法流程图
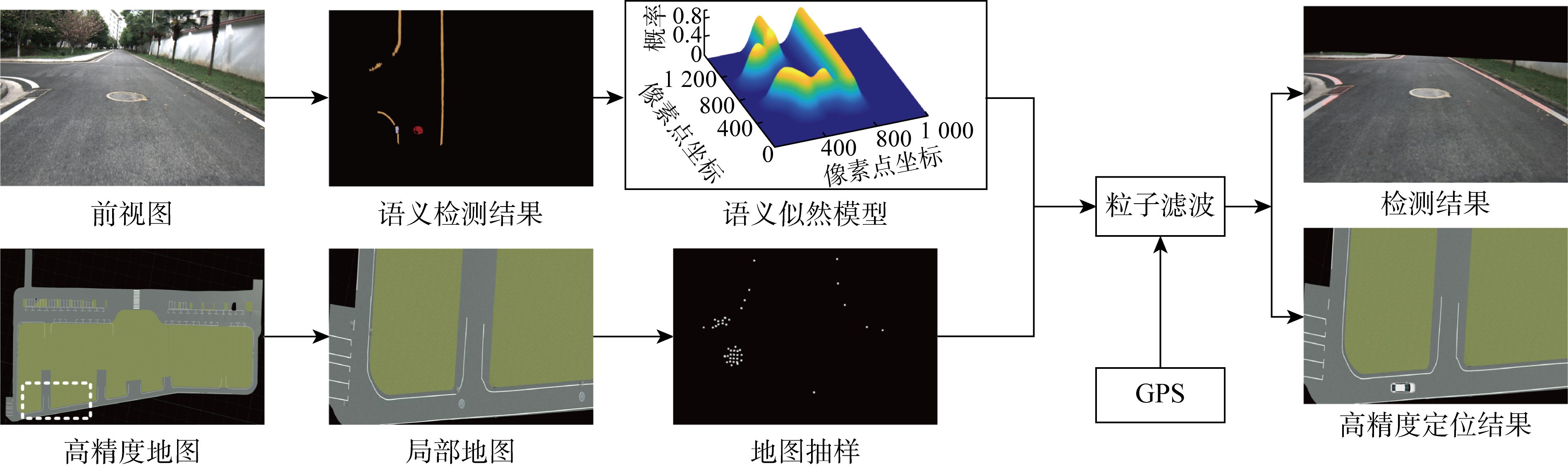
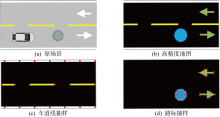
图2
高精度地图表征及其抽样
图3
车身坐标系与图像坐标系转换
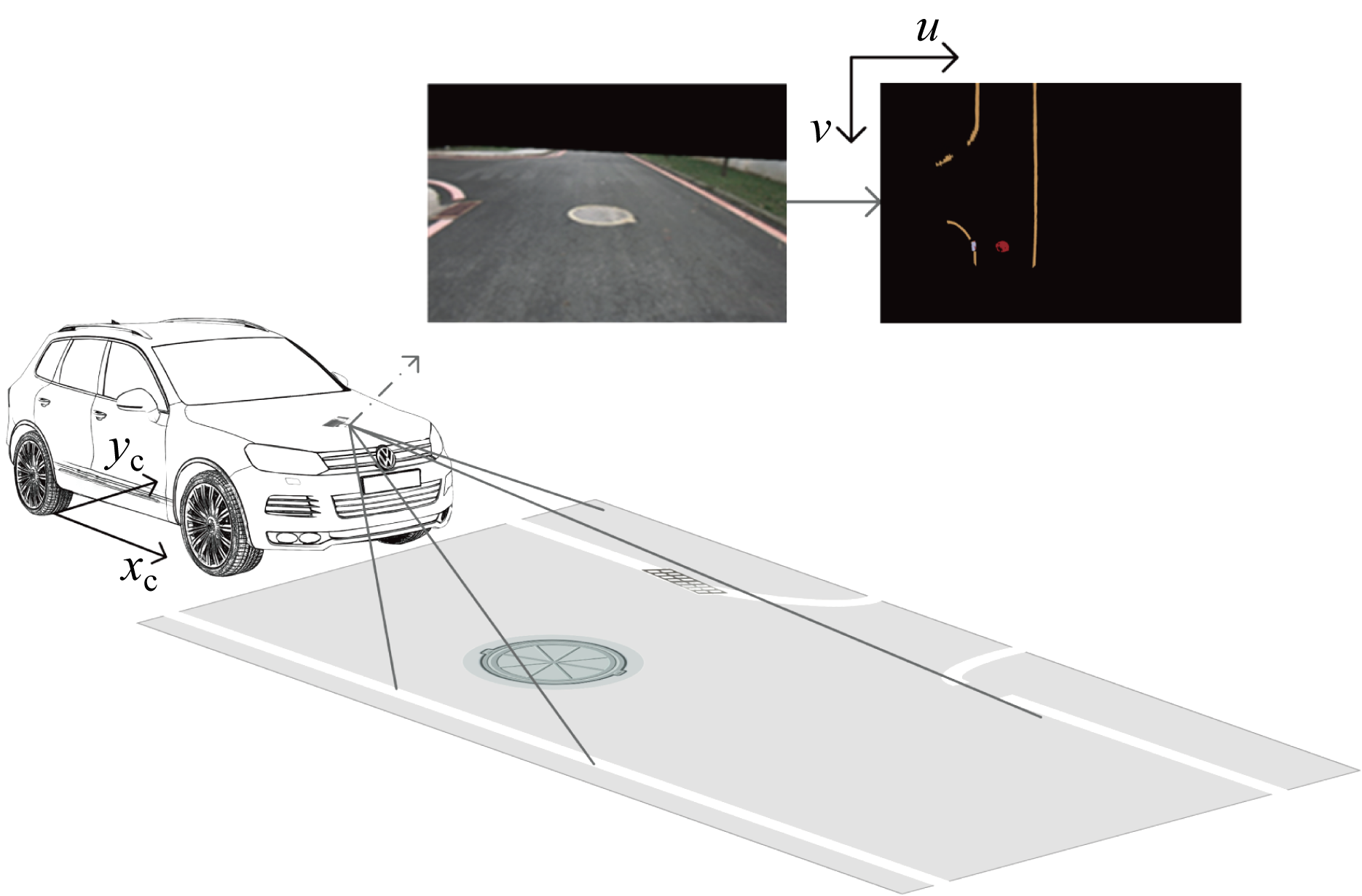
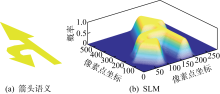
图4
从语义目标获得SLM
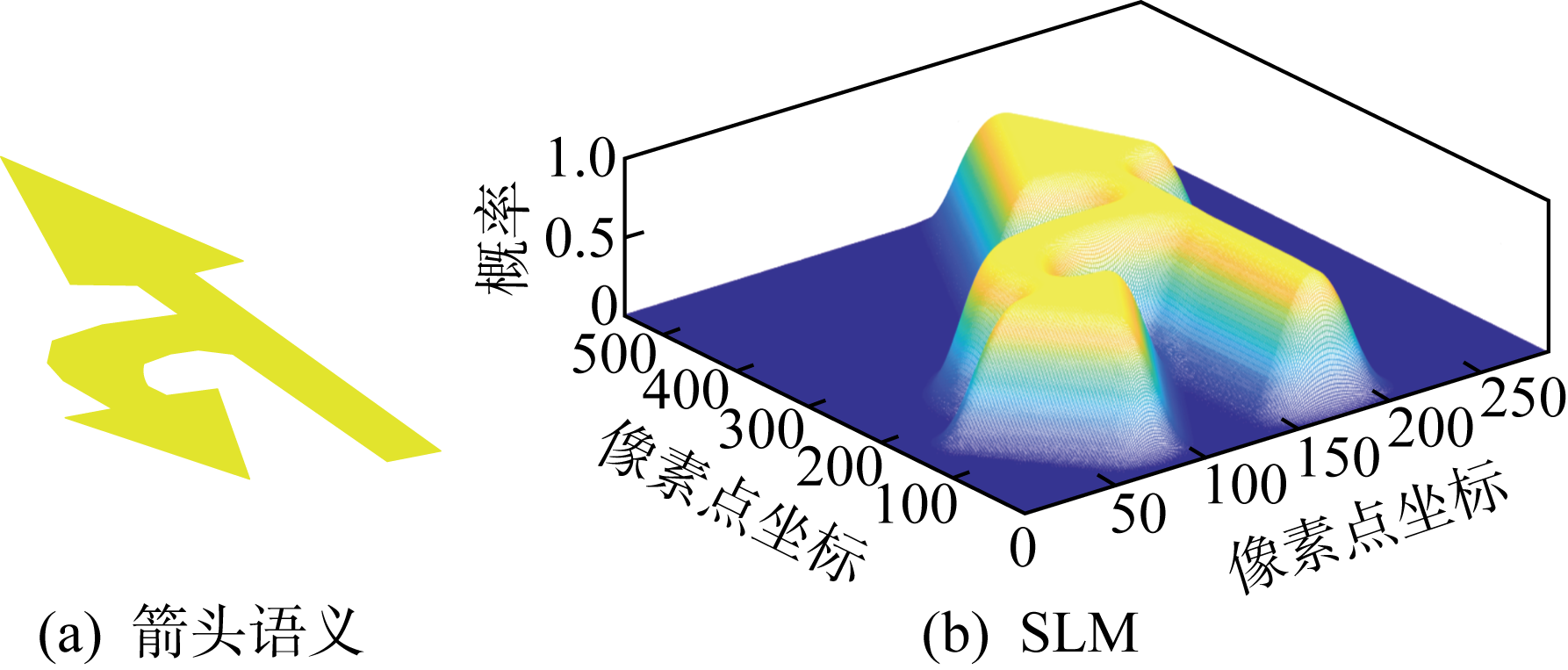
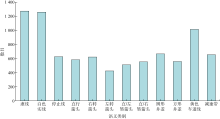
图5
数据集各类别语义分布
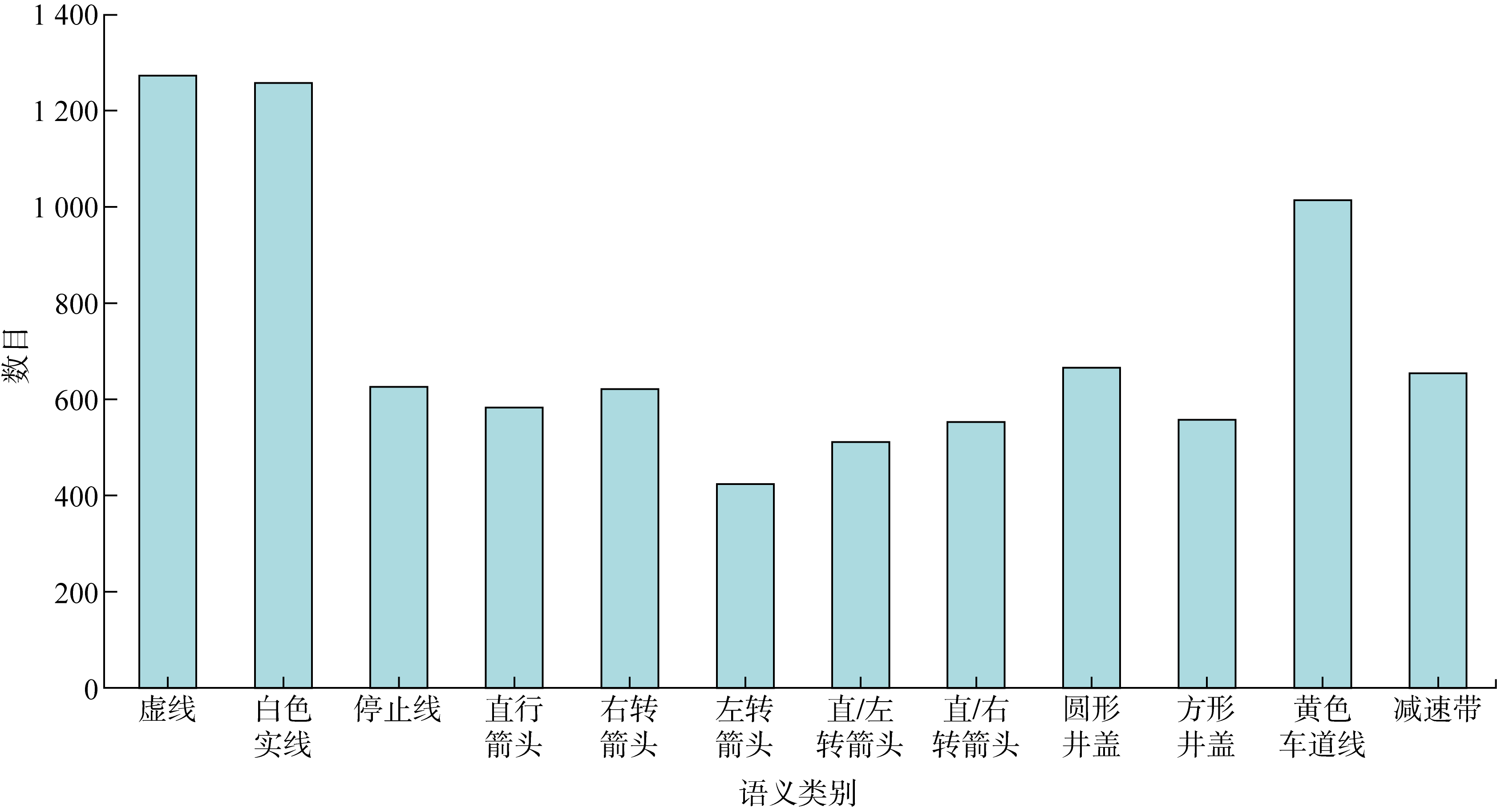
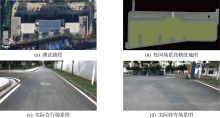
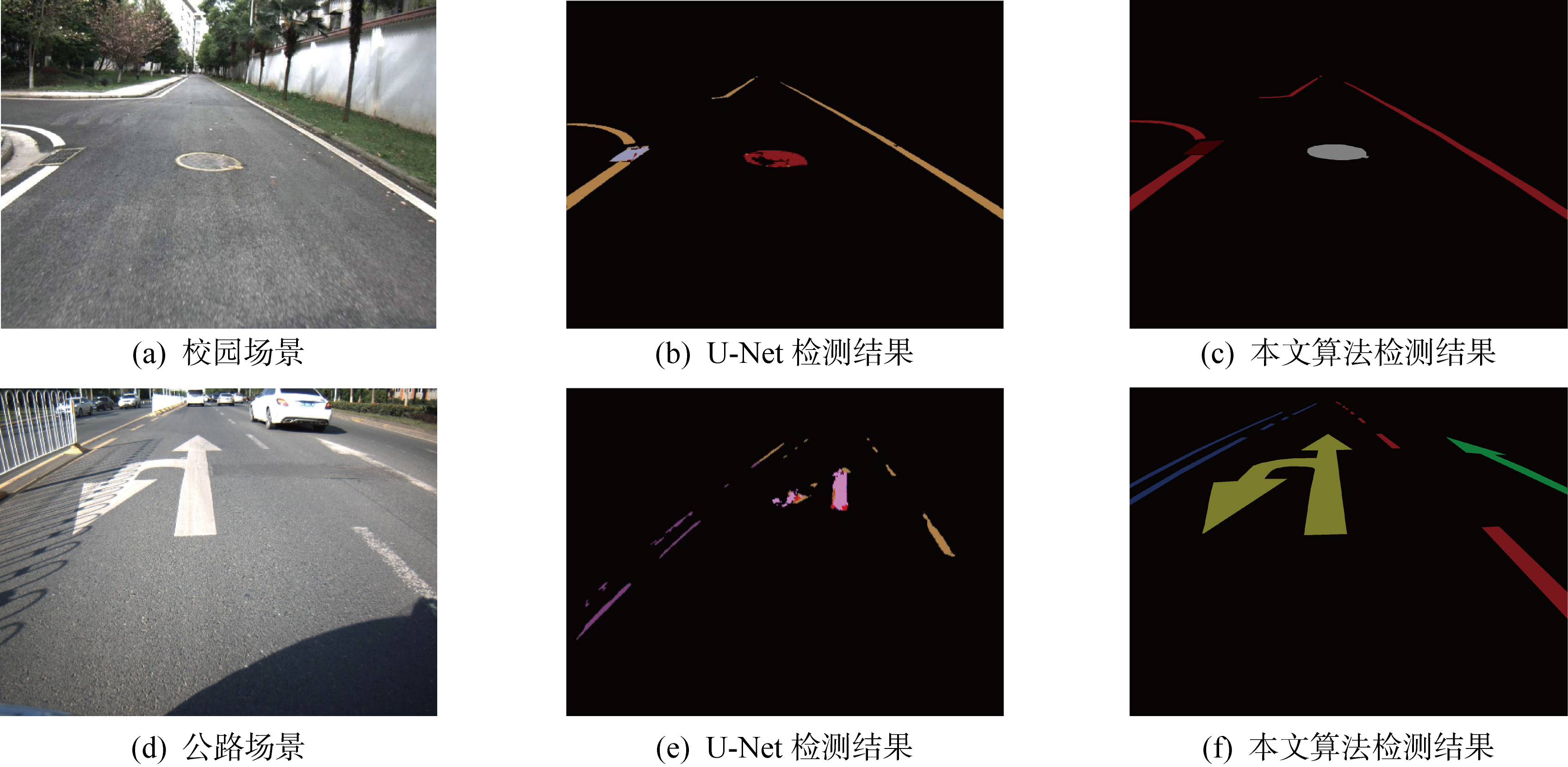
图6
校园实验场景
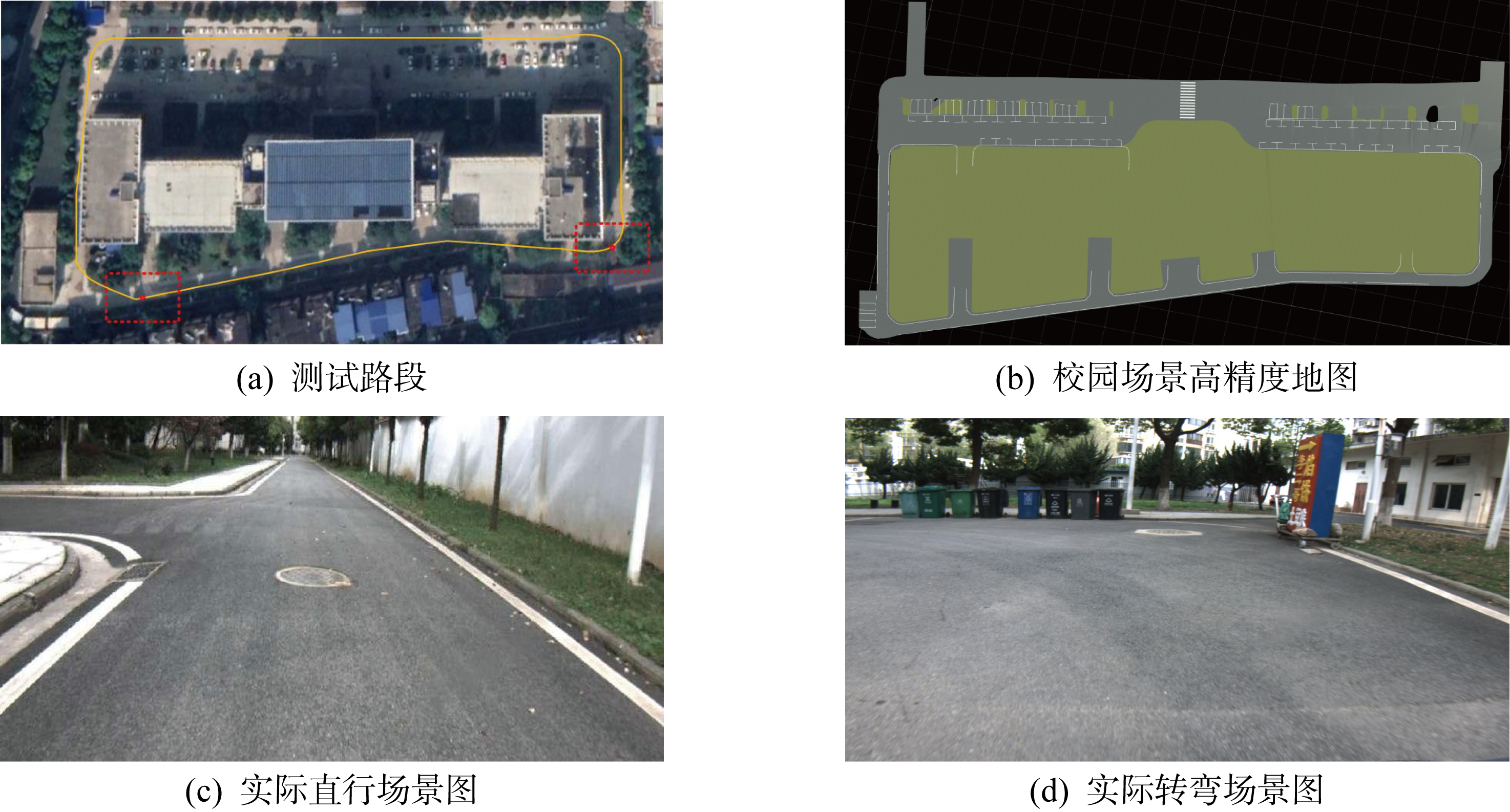

图7
地图抽样点与SLM匹配过程
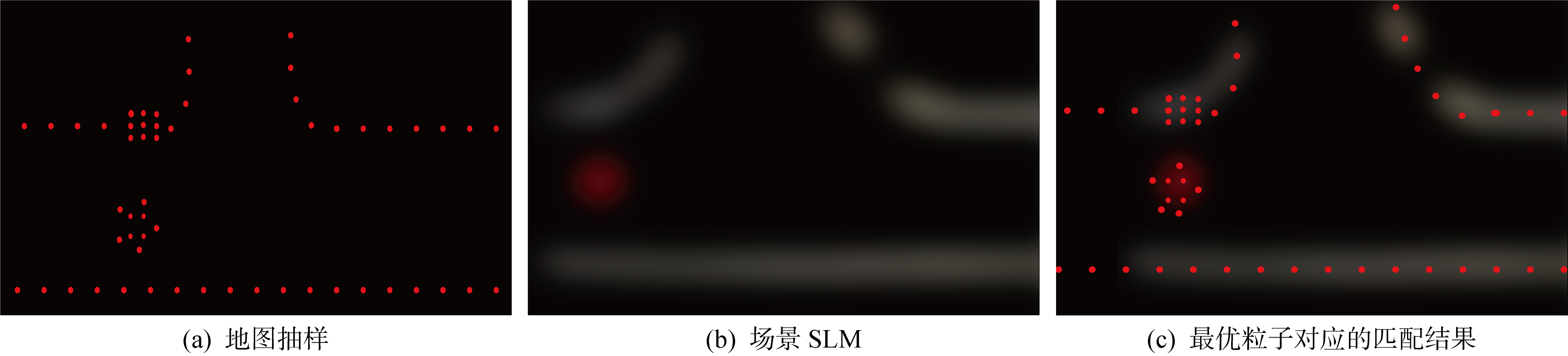
表1
校园场景下定位误差对比
| 方法 | 最小误差/cm | 最大误差/cm | 平均误差/cm |
|---|---|---|---|
| 本文算法 | 3.4 | 49.9 | 14.4 |
| 文献[11] | 11.0 | 125.8 | 54.7 |
| 文献[13] | 11.8 | 59.5 | 30.4 |

图8
校园场景下的定位误差经验累积分布
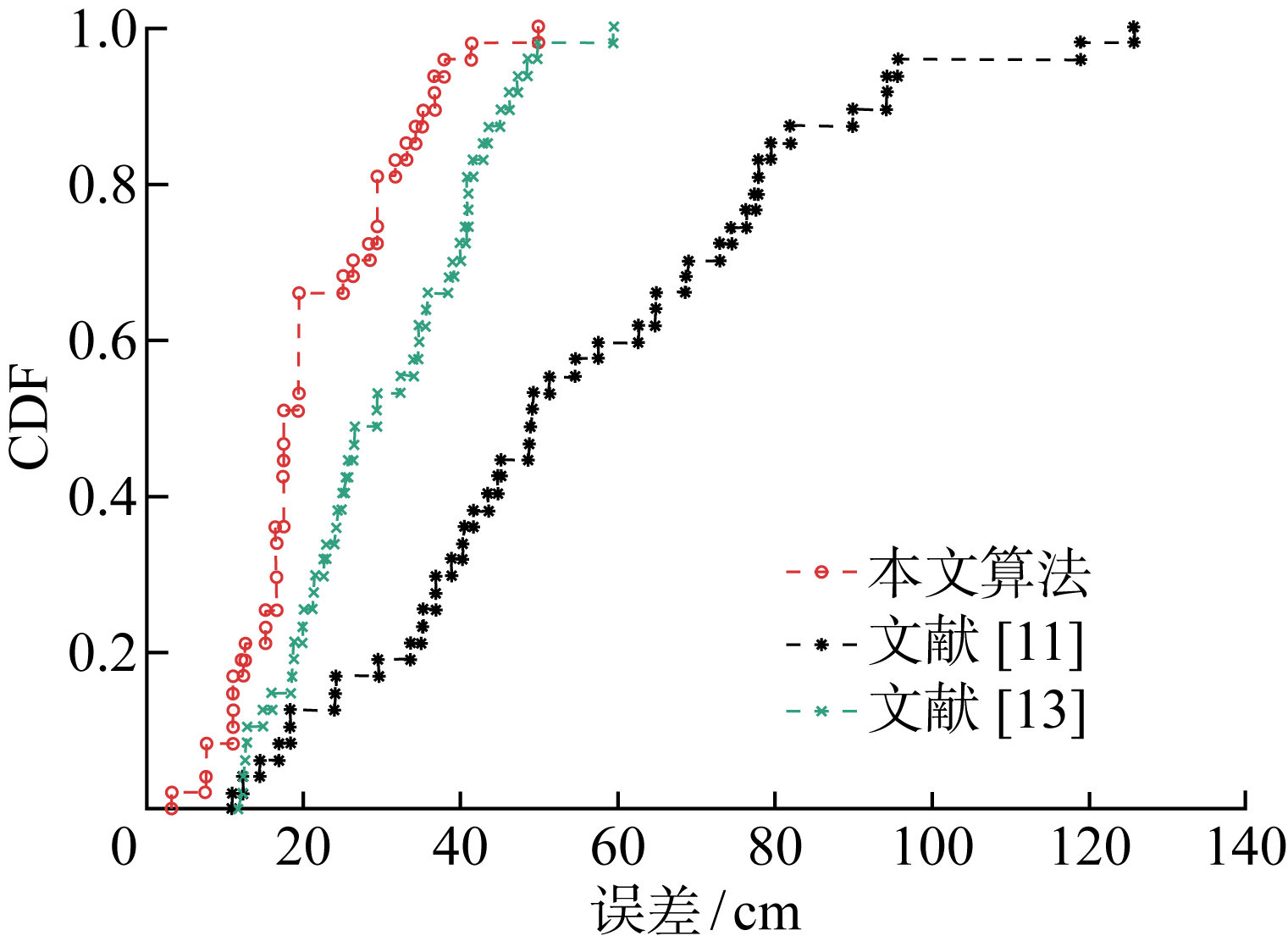
图9
城市道路场景
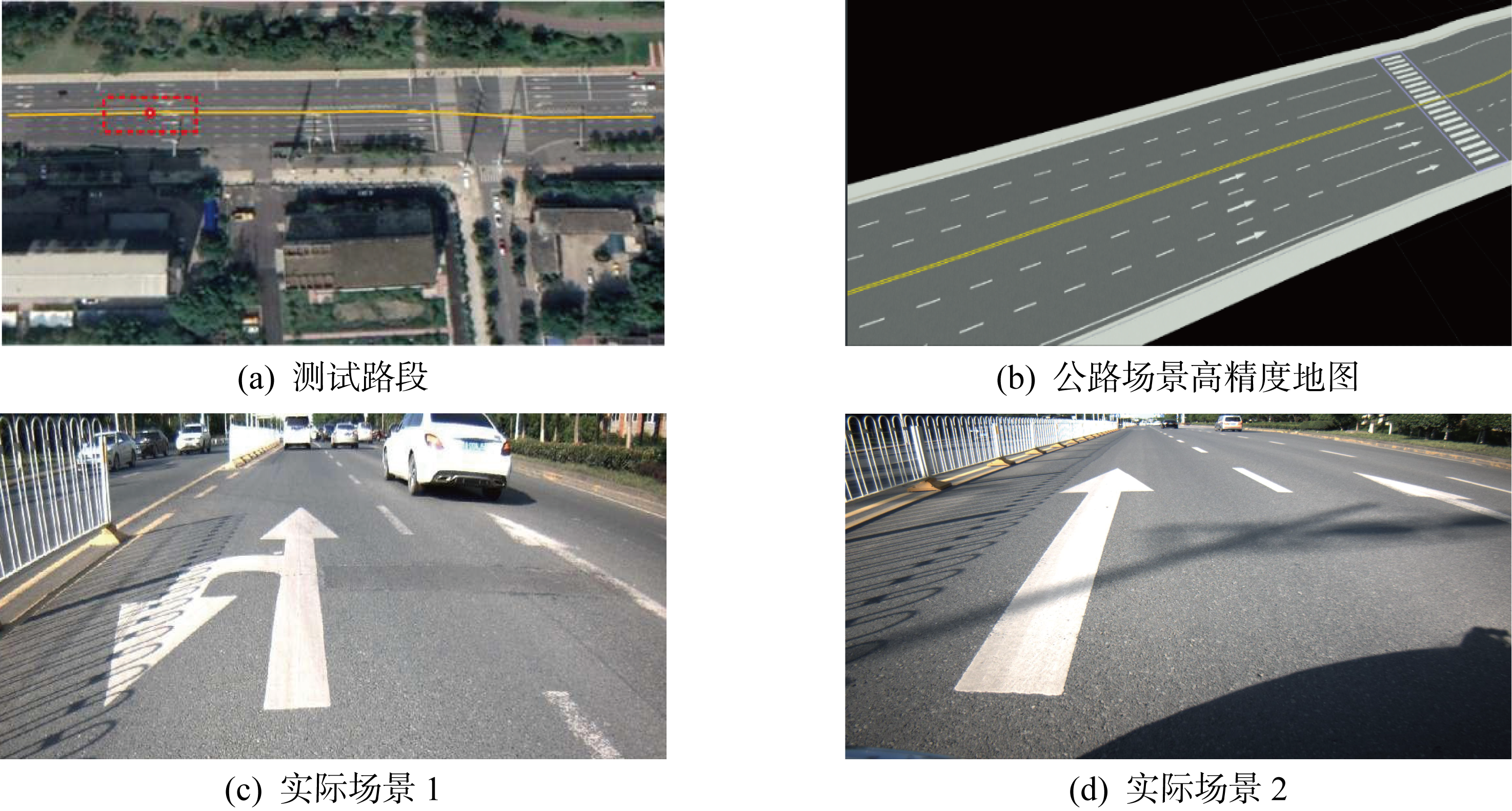
表2
城市道路场景下误差对比
| 方法 | 最小误差/cm | 最大误差/cm | 平均误差/cm |
|---|---|---|---|
| 本文算法 | 2.8 | 26.9 | 14.0 |
| 文献[ | 2.2 | 103.8 | 45.9 |
| 文献[ | 17.2 | 29.8 | 24.2 |
图10
城市公路场景定位误差经验累积分布
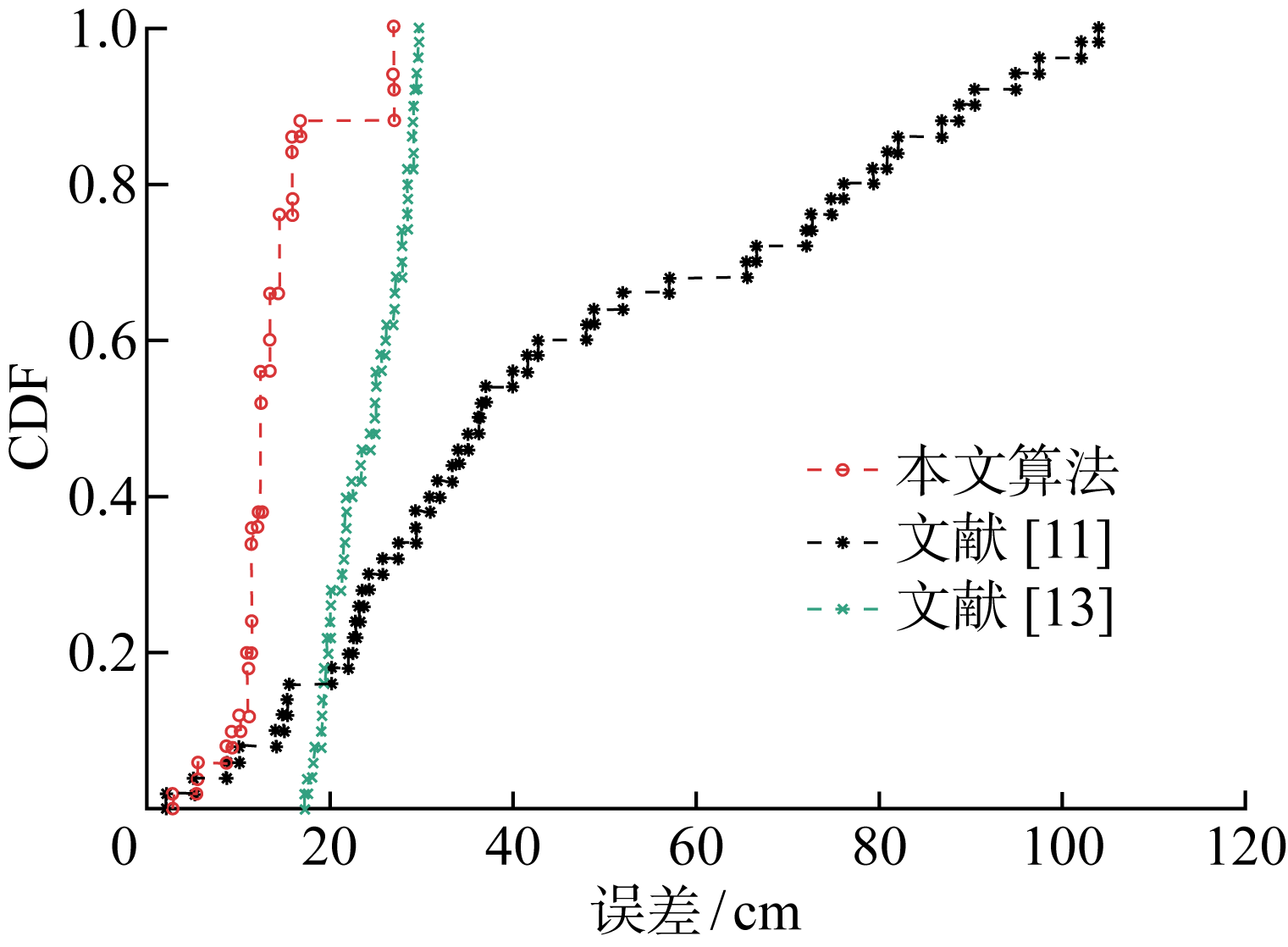
表3
语义检测结果的IoU对比
| 类别 | IoU/% | |||
|---|---|---|---|---|
| 本文 方法 | Swin- Unet[ | ConvNext- Unet[ | U-Net | |
| 虚线 | 86.0 | 74.0 | 65.3 | 70.1 |
| 白色实线 | 90.6 | 65.7 | 56.3 | 78.1 |
| 停止线 | 85.7 | 69.9 | 64.8 | 62.3 |
| 直行箭头 | 87.6 | 72.6 | 71.8 | 60.2 |
| 直行或左转箭头 | 85.3 | 71.9 | 65.8 | 66.3 |
| 圆形井盖 | 81.4 | 66.9 | 60.7 | 58.7 |
| 方形井盖 | 84.3 | 71.3 | 70.1 | 58.6 |
| 黄色车道线 | 88.3 | 72.2 | 68.5 | 64.4 |
| 平均交并比 | 86.1 | 62.7 | 58.1 | 57.6 |

图11
语义检测结果对比
| [1] | JO H G, LEE W, KIM E. Mixture Density-PoseNet and its application to monocular camera-based global localization[J]. IEEE Transactions on Industrial Informatics, 2021, 17(1): 388-397. |
| [2] | MA Y F, WANG Z Y, YANG H, et al. Artificial intelligence applications in the development of autonomous vehicles: A survey[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 315-329. |
| [3] | 中国科学技术协会. 中科协发布2020重大科学问题和工程技术难题[EB/OL]. (2020-08-16)[2023-03-09]. https://www.cast.org.cn/art/2020/8/16/art_90_130822.html. |
| China Association for Science and Technology. 2020 CAST releases 2020 major scientific and engineeringtechnical challenges[EB/OL]. (2020-08-16)[2023-03-09]. https://www.cast.org.cn/art/2020/8/16/art_90_130822.html. | |
| [4] | ZHONG H X, WANG R. A visual-degradation-inspired model with HSV color-encoding for contour detection[J]. Journal of Neuroscience Methods, 2022, 369(1): 1-12. |
| [5] | BEN C, BUSHNAG A. Color edge detection using multidirectional sobel filter and fuzzy fusion[J]. Computers, Materials & Continua, 2023, 2(2): 2839-2852. |
| [6] | NEVEN D, DE B, GEORGOULIS S, et al. Towards end-to-end lane detection: An instance segmentation approach[C]// IEEE Intelligent Vehicles Symposium (IV). Jiangsu, China: IEEE, 2018: 286-291. |
| [7] | JANG W, HYUN J, AN J, et al. A lane-level road marking map using a monocular camera[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(1): 187-204. |
| [8] | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: An accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| [9] | LIU R, WANG J L, ZHANG B Q. High definition map for automated driving: Overview and analysis[J]. Journal of Navigation, 2020, 73(2): 324-341. |
| [10] |
胡兵, 杨明, 郭林栋, 等. 基于地面快速鲁棒特征的智能车全局定位方法[J]. 上海交通大学学报, 2019, 53(2): 203-208.
doi: 10.16183/j.cnki.jsjtu.2019.02.011 URL |
| HU Bing, YANG Ming, GUO Lindong, et al. Global localization for intelligent vehicle using ground SURF[J]. Journal of Shanghai Jiao Tong University, 2019, 53(2): 203-208. | |
| [11] | CUI D, XUE J, ZHENG N. Real-time global localization of robotic cars in lane level via lane marking detection and shape registration[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1039-1050. |
| [12] | 王相龙, 胡钊政, 李祎承, 等. 基于路面指纹的高精度车辆定位[J]. 交通运输系统工程与信息, 2018, 18(4): 38-45. |
| WANG Xianglong, HU Zhaozheng, LI Yicheng, et al. High accuracy vehicle localization by referring to pavement fingerprint[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(4): 38-45. | |
| [13] | LIN C, LIAN F L. System integration of sensor-fusion localization tasks using vision-based driving lane detection and road-marker recognition[J]. IEEE Systems Journal, 2020, 14(3): 4523-4534. |
| [14] | XIAO Z Y, YANG D G, WEN T P, et al. Monocular localization with Vector HD Map (MLVHM): A low-cost method for commercial IVs[J]. Sensors, 2020, 20(7): 1870-1-24. |
| [15] | RONNEBERGER O, FISCHER P, BROX T. U-Net: Convolutional networks for biomedical image segmentation[C]// International Conference on Medical Image Computing and Computer-assisted Intervention. Munich, Germany: Springer, 2015: 234-241. |
| [16] | ASAM. ASAM OpenDRIVE[EB/OL]. (2020-11-14)[2023-03-09]. https://www.asam.net/standards/detail/opendrive/. |
| [17] | THRUN S. Probabilistic robotics[J]. Communications of the ACM, 2002, 45(3): 52-57. |
| [18] | 国家市场监督管理总局, 国家标准化管理委员会. 道路交通标志和标线. 第2部分:道路交通标志. GB 5768.2—2022[S]. 北京: 中国标准出版社, 2022. |
| State Administration for Market Regulation, Standardization Administration of China. Road traffic signs and markings. Part 2:Road traffic signs. GB 5768.2—2022[S]. Beijing: Standards Press of China, 2022. | |
| [19] | ZHANG Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. |
| [20] | CAO H, WANG Y, CHENG J, et al. Swin-Unet: Unet-like pure transformer for medical image segmentation[C]// European Conference on Computer Vision. Cham, Switzerland: Springer Nature Switzerland, 2022: 205-218. |
| [21] | LIN S C, LEE H W, HSIEH Y H, et al. Masked attention ConvNeXt Unet with Multi-Synthesis dynamic weighting for anomaly detection and localization[C]// British Machine Vision Conference. Aberdeen, England: Machine Translation Springer, 2023: 722-735. |
| [1] | 崔显, 陈自强. 基于ECM和SGPR的高鲁棒性锂离子电池健康状态估计方法[J]. 上海交通大学学报, 2024, 58(5): 747-759. |
| [2] | 孙志伟, 胡雄, 董凯, 孙德建, 刘洋. 基于LSTM-CAPF框架的岸桥起升减速箱轴承寿命预测方法[J]. 上海交通大学学报, 2024, 58(3): 352-360. |
| [3] | 陈坤1, 2, 赵旭1, 董春玉1, 邸子超1, 陈宗枝1. 基于滤波器预测的抗遮挡目标跟踪算法[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 400-413. |
| [4] | 黄鹤, 吴琨, 李昕芮, 王珺, 王会峰, 茹锋. 自适应插值飞蛾扑火优化的多特征粒子滤波车辆跟踪算法[J]. 上海交通大学学报, 2022, 56(2): 143-155. |
| [5] | 高红莲, 尤杰, 曹松银. 基于PF-UKF组合滤波的SINS/GPS组合导航系统空中对准方法[J]. 上海交通大学学报, 2022, 56(11): 1447-1452. |
| [6] | 侯煜冠, 韩远鹏, 谢金月, 毛兴鹏. 基于SDE模型的雷达组目标角度跟踪方法[J]. 空天防御, 2021, 4(1): 41-46. |
| [7] | 毕晓君,胡菘益. 基于混合引导策略的高精度萤火虫优化粒子滤波算法[J]. 上海交通大学学报(自然版), 2019, 53(2): 232-238. |
| [8] | 孙一奇,吴爱国,董娜,邵一哲. 基于粒子滤波与改进GVF Snake的人手跟踪算法[J]. 上海交通大学学报(自然版), 2018, 52(7): 801-807. |
| [9] | 赵国旗a,b,杨明a,b,王冰a,b,王春香c. 基于智能终端的移动机器人室内外无缝定位方法[J]. 上海交通大学学报(自然版), 2018, 52(1): 13-19. |
| [10] | 张铁,马琼雄. 人机交互中的人体目标跟踪算法[J]. 上海交通大学学报(自然版), 2015, 49(08): 1213-1219. |
| [11] | 李雄杰1,2,周东华2. 混杂系统故障诊断的粒子滤波器方法[J]. 上海交通大学学报(自然版), 2015, 49(06): 849-854. |
| [12] | 曹洁a,b,李玉琴a,吴迪b. 基于改进差分进化的高精度粒子滤波算法[J]. 上海交通大学学报(自然版), 2014, 48(12): 1714-1720. |
| [13] | 裴福俊,李昊洋,武玫. 基于分布式无味边缘粒子滤波的同步定位与地图构建[J]. 上海交通大学学报(自然版), 2014, 48(07): 986-992. |
| [14] | 刘士荣1,2,吴楚1,3,张波涛1,2,章海兵1,2. 基于极线约束SIFT特征和粒子滤波的目标跟踪算法[J]. 上海交通大学学报(自然版), 2014, 48(07): 1026-1032. |
| [15] | 曹松晓,王宣银,向可. 基于内侧轮廓模型的粒子滤波轮廓跟踪[J]. 上海交通大学学报(自然版), 2013, 47(07): 1022-1026. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 391
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 491
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||