深空探测器在着陆目标行星之前将经历巡航段、接近段、环绕轨道段.与相对稳定的巡航和环绕轨道段相比,接近段至关重要,决定了航天器能否进入围绕目标行星的预定轨道[1 -2 ] .导航系统作为深空探测任务的重要组成部分,直接影响深空探测器的运行状态[3 ] .一般来说,在接近段,导航系统的位置精度为1~10 km,而每次轨道确定所需的无线电测量和延迟时间为10~100 min.因此,深空探测器导航系统的精度和实时性是保证深空探测任务成功的两个重要因素.
天文导航是深空中使用的主要自主导航方法之一,包括水手号和旅行者号在内的航天器都使用天文导航.深空探测器的自主导航系统一般由轨道动力学、量测模型和最优状态估计方法组成.滤波方法对导航系统的性能至关重要,它决定了参数估计的准确性和实时性.为获得深空探测器的位置和速度,模型加速度通过数值积分器融合到滤波器中,通常采用具有固定步长的四阶龙格库塔积分法[4 -5 ] .
对于深空探测器而言,在接近阶段探测器会遇到快速时变的误差问题.这是目标星体的引力影响急剧增加,而其他天体的引力影响相对稳定所导致的.由于深空探测器目标星体的引力快速变化,所以滤波器中的数值积分误差会给导航性能带来额外的不确定性,这被视为系统模型误差,并且难以确定其统计特性.
对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题.
针对深空探测器接近段无法准确估计状态噪声和现有滤波方法计算量大以及难以防止滤波器发散的问题,提出一种基于系统噪声协方差调整的滑动窗口自适应无迹卡尔曼滤波方法(Sliding Window Adaptive Unscented Kalman Filter Based on System Noise Covariance Adjustment, AQUKF),通过将前一时刻系统噪声协方差与噪声协方差的变化进行加权,提高导航系统性能.
1 问题描述
1.1 轨道动力学模型
深空探测器在接近目标行星时沿双曲线轨道移动,其中心天体是目标行星,太阳和其他行星被认为是扰动.此外,太阳光压辐射和推进器脉冲等因素也会影响探测器的运动.考虑以上因素,以火星为目标天体,火心惯性坐标系统中的轨道动力学方程可描述如下[7 ] :
(1) r · = v v · = - μ m r r 3 - μ s r p s r p s 3 - r m s r m s 3 - ∑ i = 1 N p μ i r p i r p i 3 - r m i r m i 3 + a o
式中:r =(x , y , z )为天体的位置矢量;r =‖r ‖为r 的模;v =(vx , vy , vz )为天体的速度矢量;r · x · y · z · ) 为位置矢量对时间的导数;v · v · x v · y v · z ) 为速度矢量对时间的导数;μ m 为火星引力常数;μ s 为太阳引力常数;μi 为第i 颗恒星的引力常数;N p 为扰动恒星的数量;r ps 和r ms 分别为太阳与探测器和火星之间的距离;r ps 和r ms 分别为太阳和火星的坐标;r p i r m i i 颗行星与探测器和火星之间的距离;r p i r m i i 颗行星与探测器和火星之间的距离位置矢量;a o 为由其他因素引起的加速度.
设状态矢量X =[x y z vx vy vz ]T ,f (·)为过程函数,W 为过程噪声,式(1)可写为
(2) X · ( t )=f (X (t ), t )+W (t )
式中:X · x · y · z · v · x v · y v · z T t 的导数.
1.2 星光角距量测模型
背景恒星和火星、火卫一、火卫二之间的星光角距可作为量测量[17 ] .如图1 所示,本文使用行星敏感器得出恒星与目标行星之间的角度.图中:θ p i θ d i i 颗恒星与火卫一、火卫二之间的角度;l pp , l pd 分别为火卫一、火卫二到探测器的视线矢量;s p i i 颗恒星在火卫一传感器视场的矢量.
图1
图1
恒星和导航天体之间的角度
Fig.1
Angle between the star and Mars
在火星探测器导航系统中,星光角距量测模型可以表示为
(3) θ m i = a r c c o s ( - l p m · s m i ) + v m θ p i = a r c c o s ( - l p p · s p i ) + v p θ d i = a r c c o s ( - l p d · s d i ) + v d
式中:i=1, 2, 3;θ m i i 颗恒星与火星之间的角度;l pm 为火星到探测器的视线矢量;s m i s d i i 颗恒星在火星、火卫二传感器视场的矢量;v m , v p , v d 分别为第i 颗恒星与火星、火卫一、火卫二之间的量测噪声.
设量测矢量Z =[θ m i θp i θd i T ,h (·)为量测模型函数,V 为量测噪声,式(3)可写为
(4) Z (t )=h (X (t ), t )+V (t )
1.3 不确定性误差及其传递特性
1.3.1 积分误差分析
无论何种数值积分方法,都是轨道动力学微分方程的近似解,因此会产生计算误差. 由于计算过程可以等效于前后两步之间斜率的加权平均值与积分步长的乘积,所以斜率的加权平均值会产生较大的近似误差(即非线性微分方程误差的截断). 积分步长越小,近似误差越小. 因此,积分误差主要受数值积分步长的影响. 另外,由数值积分方法引起的摄动加速度误差可以表示为
(5) δa (t )=$\overset{\infty }{\mathop{\underset{i=p}{\mathop \sum }\,}}\,\frac{{{H}^{p+1}}}{\left( p+1 \right)!}\frac{{{\text{d}}^{p+1}}}{\text{d}{{t}^{p+1}}}$f (t , a (t ))
式中:f (t , a (t ))为航天器轨道动力学模型;p 为数值积分的阶数;H 为积分步长. 尽管误差模型可以描述轨道积分误差,但这种误差不仅难以使用统计方法来描述,而且航天器轨道动力学模型随着d p d t p f (t , a (t ))的高阶变化也难以准确表示.因此,轨道动力学模型的积分误差可视为复杂的不确定误差,该误差在轨道动力学模型中积分两次,直接影响航天器的导航精度.
1.3.2 积分误差传递分析
(6) δ r · = δ v δ v = ∫ t 1 t 2 δ a ( t ) d t
(7) δa (t )=$\frac{{{H}^{5}}}{5!}\frac{{{\text{d}}^{5}}}{\text{d}{{t}^{5}}}$f (t , a (t ))
(8) d 5 d t 5 720 μ r ( 5 ) r 7 1 200 μ r · 3 r ¨ r 6 360 μ r · r ¨ r 5 1 200 μ r · 3 r ¨ r 6 60 μ r ¨ 2 r ( 3 ) r 4 30 μ r · r ( 4 ) r 4 2 μ r ( 5 ) r 3
式中:μ 为中心天体的引力常数;r · v =μ 2 r - 1 a x v 为航天器速度,ax 为轨道半长轴;r ¨ a =μ r 2 r (3) =-2μ v r 3 r (4) =6μ v 2 r 4 -2 μ a r 3 r (5) =-24μ v 3 r 5 μ v 3 a r 4 -2 μ r ( 3 ) r 3 a 为航天器加速度.
如式(6)所示,轨道动力学模型的积分误差随积分步长而变化.当轨道高度为距火星200 km、积分步长为250 s时,轨道动力学模型引起的加速度误差约为 0.002 1 m/s2 .刹车后,继续飞行约10 min,速度误差约为1.26 m/s,位置误差为750 m.因此,积分误差会影响导航精度,尤其是在接近阶段.
当航天器遇到目标天体时,目标天体会导致航天器加速度急剧增加.如果积分时间步长较大,则无法快速跟踪加速度的变化,会引入较大的积分误差.因此,状态模型的误差在接近段急剧增加,过程噪声在航天器接近目标时无法保持不变.为准确估计航天器的位置和速度,需要采用自适应非线性滤波估计过程噪声协方差.一方面,为保证导航精度,需要减小状态模型误差;另一方面,为获得更好的导航性能,应该跟踪或估计状态模型的变化.
2 自适应无迹卡尔曼滤波
2.1 传统无迹卡尔曼滤波
非线性离散随机系统在特定时刻k 的状态模型考虑如下:
(9) X k + 1 = f ( X k , k ) + w k Z k = h ( X k , k ) + v k
式中:Xk 和Zk 分别为k 时刻的状态矢量和观测矢量;wk 和vk 分别为k 时刻的过程噪声和量测噪声.假设量测噪声和过程噪声是具有可加性的零均值高斯白噪声且互不相关,则
E (wk w T j ) =δkj Qk
E (vk v T j ) =δkj Rk
(10) E (vk w T j ) =0, ∀k , j
式中: Qk 和Rk 分别为k 时刻的过程噪声协方差和量测噪声协方差;当k =j 时,克罗内克函数δkj 取值为1,当k ≠j 时,δkj 取值为0.
对于具有可加性噪声的非线性系统式(9),传统的UKF计算过程如下.
X · 0 E (X 0 )
(11) P0 =E[(X0 - X ^ 0 0 - X ^ 0 T ]
(12) χ k - 1 0 = X ^ k - 1 χ k - 1 i = X ^ k - 1 + ( n + λ ) P k - 1 i = 1 , 2 , … , n χ k - 1 i = X ^ k - 1 - ( n + λ ) P k - 1 i = n + 1 , n + 2 , … , 2 n
步骤3 计算k 时刻的一步预测值.首先根据非线性函数f (·),计算Sigma点的变换结果:
(13) χ k / k - 1 i χ k - 1 i
(14) X ^ k / k - 1 ∑ i = 0 2 n ω i m χ k / k - 1 i
(15) Pk/k -1 = ∑ i = 0 2 n ω i c χ k / k - 1 i X ^ k / k - 1 χ k / k - 1 i X ^ k / k - 1 T +Qk -1
(16) χ k / k - 1 0 = X ^ k / k - 1 χ k / k - 1 i = X ^ k / k - 1 + ( n + λ ) P k / k - 1 i = 1 , 2 , … , n χ k / k - 1 i = X ^ k / k - 1 - ( n + λ ) P k / k - 1 i = n + 1 , n + 2 , … , 2 n
步骤5 计算一步预测量测值及其自协方差矩阵、互协方差矩阵.根据非线性函数h (·),量测Sigma样本点的变换为
(17) γ k / k - 1 i χ k / k - 1 i
(18) Z ^ k / k - 1 ∑ i = 0 2 n ω i m γ k / k - 1 i ∑ i = 0 2 n ω i m χ k / k - 1 i
(19) P z ^ k / k - 1 ∑ i = 0 2 n ω i c γ k / k - 1 i Z ^ k / k - 1 γ k / k - 1 i Z ^ k / k - 1 T +R
(20) P x ^ k / k - 1 z ^ k / k - 1 ∑ i = 0 2 n ω i c χ k / k - 1 i X ^ k / k - 1 γ k / k - 1 i Z ^ k / k - 1 T
步骤6 计算卡尔曼增益、状态估计结果及其协方差矩阵:
(21) Kk = P ^ x ^ k / k - 1 z ^ k / k - 1 P ^ z ^ k / k - 1 - 1
(22) X ^ k X ^ k / k - 1 k (Zk - Z ^ k / k - 1
(23) Pk =Pk/k -1 -Kk P z ^ k / k - 1 K T k
(24) ω 0 m = λ n + λ ω i m = λ 2 ( n + λ ) , i = 1 , 2 , … , 2 n ω 0 c = λ n + λ + 1 - α 2 + β ω i c = λ 2 ( n + λ ) , i = 1 , 2 , … 2 n
(25) λ =α 2 (n +τ )-n
式中:α 为很小的正数;β 为X 的分布信息;参数τ 常取τ =3-n ,故式(25)又可以写为
(26) λ =3α 2 -n
2.2 自适应协方差调整的UKF
在确定的滤波器参数情况下,状态估计可能会有很大的估计误差.在实际应用中,量测噪声Rk 可以根据传感器误差获取. 与量测噪声相比,系统模型误差很难准确获取,因此实际应用中需要自适应地估计过程噪声协方差Qk . 假设过程噪声和量测噪声是零均值可加性的高斯白噪声,且量测噪声Rk 是已知的恒定噪声. 利用Maybeck的自适应线性卡尔曼滤波方法[18 ] 建立AQUKF方法,对Qk 的估计进行平稳化处理,使其在一个滑动窗口内是平稳的,并且k 时刻的状态噪声估计Q ^ k k -N +1,k ]区间的差值,避免因某一时刻Qk 的突变而产生较大误差,并将改进方法与UKF方法相结合应用在火星探测器中.
根据Maybeck的理论,Qk 的观测值Q k *
(27) Q k * k Δ X T k k -(Pk/k -1 - Q ^ k - 1
式中:ΔXk =X ^ k - X ^ k / k - 1 Pk 为状态估计协方差,Pk/k -1 为一步预测的状态协方差;Q ^ k - 1 k -1时刻的状态噪声估计. 式(27)表明,Q k *
将过程噪声协方差的观测值Q k * Q ^ k - 1
(28) Q ^ k Q ^ k - 1 Q (Q k * Q ^ k - 1
式中:ωQ 为每次更新时的权重,如果ωQ 较小表示每次更新更倾向于与Q ^ k - 1 ωQ 较大表示相邻时刻之间Qk 发生较大变化. 因此该自适应方法的性能对权重ωQ 的选择非常敏感,Busse等[19 ] 采用试错法来选择合适的ωQ ,但是所消耗的时间长,且没有一个直接的指标来衡量不同ωQ 的优良性;Lee等[18 ] 采用下降单纯性法来优化关于ωQ 的目标函数,但是计算量较大.另外,文献[18 -19 ]只是针对ωQ 的选择采用不同的方法,没有改变模型对ωQ 的依赖性,方法性能仍然对ωQ 很敏感.
因此,使用宽度为N 的滑动窗口对式(28)进行平稳化处理:
(29) Q ^ k Q ^ k - 1 1 N ∑ j = k - N + 1 k Q j * Q ^ j - 1
因为式(27)得到的噪声估计同时包含位置误差和速度误差,而位置误差比速度误差大几个量级,所以由此得到的噪声估计值并不准确,无法解决小干扰问题.为提高性能,将Q ^ k
(30) Q ^ k Q r r Q r v Q v r Q v v
(31) qvv = 1 T vv )
(32) Q ^ k 0 0 0 q v v
然后,将Q ^ k k +1时刻的状态噪声.该方法将速度噪声引起的误差与位置噪声引起误差隔离开,解决小干扰问题.
3 仿真和分析
3.1 仿真参数设置
以火星探测器为例进行仿真分析,仿真数据由系统工具包产生.坐标系采用J2000.0火心惯性坐标系,轨迹参数如表1 所示.表中:a' 为长半轴;e 为偏心率;i' 为轨道倾角.
参考轨道由RKF89数字积分器生成,该积分器使用1 s的固定步长,时间为1997年7月1日0时0分0秒至1997年7月8日0时0分0秒.在接近段,火星和探测器之间的最小距离为 5 211 km.仿真中使用的行星星历和恒星数据库分别是JPL DE421星表和第谷恒星星表.量测中的导航天体为火星、火卫一和火卫二.火星、火卫一、火卫二和恒星传感器的精度设置为0.1像素,火星、火卫一和火卫二的光学传感器参数如表2 所示.表中:f' 为焦距;FOV为视场角;R 为分辨率.
X 0 =[r v ]=[1. 590 5×109 6. 504 4×108 2. 829 5×107 -4. 925×103 -2. 030 5×103 76. 742 2]
P 0 =diag(106 , 106 , 106 , 102 , 102 , 102 )
Q 0 =diag(10-3 , 10-3 , 10-3 , 10-8 , 10-8 , 10-8 )
R =9.6946 × 10 - 13 9.5472 × 10 - 13 3.3440 × 10 - 23 1.0432 × 10 - 23 9.4032 × 10 - 23 3.9301 × 10 - 23 2.5045 × 10 - 13 6.2661 × 10 - 13 1.0078 × 10 - 27
3.2 结果分析
分别使用UKF 和扩展卡尔曼滤波方法对非线性模型式(9)进行滤波,然后与AQUKF 进行比较分析,最后对AQUKF 方法进行影响因素分析.
3.2.1 UKF与AQUKF滤波方法的结果比较
图2 和图3 分别给出了使用UKF 和AQUKF 方法的滤波结果. 仿真结果的统计时间段从第1天开始至结束. 图2 中:Dr Dr ‖=‖[Dx Dy Dz ]‖为航天器位置的误差; Dv =‖Dv ‖=‖[Dvx Dvy Dvz ]‖为航天器速度的误差.
图2
图2
UKF方法滤波结果
Fig.2
Results of UKF algorithm
图3
图3
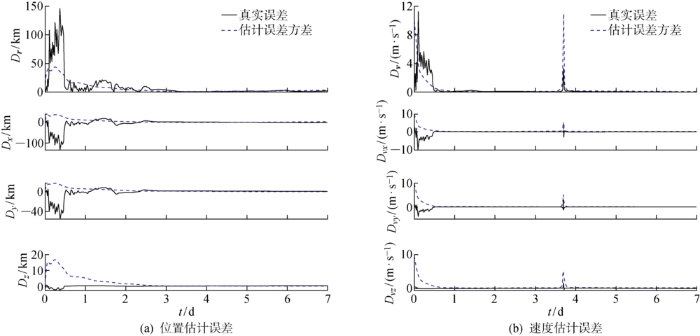
AQUKF方法滤波结果
Fig.3
Results of AQUKF algorithm
表3 给出了UKF和AQUKF方法滤波收敛后的平均误差和最大误差.由表3 可知,本文提出的AQUKF方法位置精度比UKF提高90.97%;速度精度比UKF提高66.17%.从图2 (a)可以看出,探测器在第3天末x 方向和y 方向的位置误差出现较大发散,并且直到第7天也没有收敛回来;从图2 (b)可以看出,探测器在第3天末x 方向和y 方向的速度误差同样出现较大发散.与位置误差发散不同的是,速度误差在发散后出现短暂收敛,并在一个恒定误差上下波动.从图3 可以看出,本文提出的AQUKF有效抑制了UKF带来的发散问题,提高了导航系统的稳定性和精度.
图4 为UKF与AQUKF位置误差和速度误差对比.从图中可以清楚地看出,在约3.7 d时,UKF滤波位置误差和速度误差开始发散.从图4 (b)中可以看出,3.7 d时AQUKF出现的尖峰比UKF稍大一些,约增加1.37 m/s,但是AQUKF可以在1.5 h内恢复收敛,而UKF并未恢复收敛.这说明探测器在某一时刻受到干扰时,利用AQUKF滤波可以很快恢复收敛,提高了导航系统的稳定性.另外从图4 (b)可以看出,AQUKF在恢复收敛之后速度误差仍然很小.
图4
图4
UKF与AQUKF估计误差对比
Fig.4
Comparison of estimation error between UKF algorithm and AQUKF algorithm
3.2.2 影响因素分析
对基于AQUKF的火星探测器导航方法在不同影响因素下的滤波性能进行仿真分析,包括滤波周期、窗口大小.其余仿真条件与3.1节保持一致.
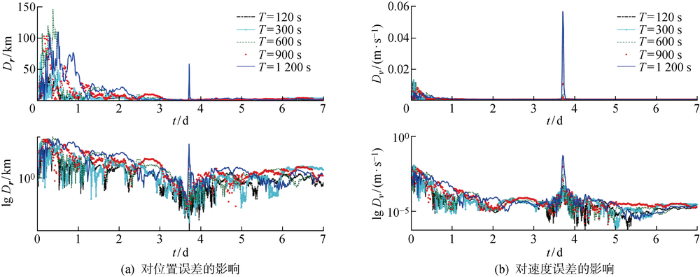
表4 和图5 给出了窗口大小为10、不同滤波周期时的滤波结果.根据图表可知滤波周期越短导航系统性能越好,随着滤波周期减小,精度提升速度变慢,因此调整滤波周期的大小对导航滤波精度的提高是有限的.当滤波周期较长时,导航滤波结果所受影响较大,原因是系统轨道动力学模型的线性化误差随时间积分进一步增大,致使系统的性能下降.当采样周期大于600 s时,估计误差曲线波动幅度变大,特别是在接近火星时位置和速度均出现较大误差,导航性能较差.
图5
图5
滤波周期对位置误差和速度误差的影响
Fig.5
Influence of filtering period on position error and velocity error
图6 和表5 给出了滤波周期为600 s、不同窗口大小时的滤波结果.根据图表可知,窗口较大或者较小时导航系统性能均有所下降.当N <10,在探测器靠近火星时会利用更多当前时刻的信息去自适应过程噪声协方差,这样就会导致导航系统性能在该时刻附近突然降低,进而影响整个时间段的系统性能.而随着时间的增加,误差也会累积增加,因此当N >10时,在利用较多历史信息的同时,也导致误差的累积.当N =10时,平衡了当前时刻和历史时刻信息带来的误差,导航性能相对最佳.
图6
图6
窗口大小对位置误差和速度误差的影响
Fig.6
Influence of window size on position error and velocity error
4 结语
本文提出一种深空探测器自主天文导航的滑动窗口自适应UKF方法,即AQUKF,相比于使用传统UKF的算法,AQUKF算法通过自适应调节系统噪声协方差,不仅解决系统发散问题,提高系统的稳定性,还可以大幅提高导航精度.由于AQUKF对窗口大小的敏感程度较小,所以不需要为选择合适的窗口消耗更多时间,也不需要通过优化目标方程选择窗口大小,损失系统的实时性.该方法可为我国未来深空探测器任务自主导航系统的研制提供参考.
参考文献
View Option
[1]
吴伟仁 , 王大轶 , 宁晓琳 . 深空探测器自主导航原理与技术 [M]. 北京 : 中国宇航出版社 , 2011 .
[本文引用: 1]
WU Weiren WANG Dayi NING Xiaolin Principle and technology of autonomous navigation for deep-space probe [M]. Beijing : China Astronautic Publishing House , 2011 .
[本文引用: 1]
[2]
房建成 , 宁晓琳 . 深空探测器自主天文导航方法 [M]. 西安 : 西北工业大学出版社 , 2010 .
[本文引用: 1]
FANG Jiancheng NING Xiaolin Autonomous celestial navigation method for a deep-space probe [M]. Xi’an : Northwestern Polytechnic University Press , 2010 .
[本文引用: 1]
[3]
YU Z S CUI P Y CRASSIDIS J L Design and optimization of navigation and guidance techniques for Mars pinpoint landing: Review and prospect
[J]. Progress in Aerospace Sciences , 2017 , 94 : 82 -94 .
DOI:10.1016/j.paerosci.2017.08.002
URL
[本文引用: 1]
[4]
MA X NING X L FANG J C Analysis of orbital dynamic equation in navigation for a Mars gravity-assist mission
[J]. The Journal of Navigation , 2012 , 65 (3 ): 531 -548 .
DOI:10.1017/S0373463312000100
URL
[本文引用: 1]
[5]
BHASKARAN S Autonomous navigation for deep space missions
[C]∥SpaceOps 2012 Conference . Stockholm, Sweden : AIAA , 2012 : 1267135 .
[本文引用: 1]
[6]
FANG J C YANG Y, Study on innovation adaptive EKF for in-flight alignment of airborne POS
[J]. IEEE Transactions on Instrumentation and Measurement , 2011 , 60 (4 ): 1378 -1388 .
DOI:10.1109/TIM.2010.2084710
URL
[本文引用: 2]
[7]
NING X L LI Z YANG Y Q et al Analysis of ephemeris errors in autonomous celestial navigation during Mars approach phase
[J]. The Journal of Navigation , 2017 , 70 (3 ): 505 -526 .
DOI:10.1017/S0373463316000734
URL
[本文引用: 3]
[9]
XIONG K WEI C L LIU L D Multiple-model adaptive estimation for space surveillance with measurement uncertainty
[J]. Optimal Control Applications and Methods , 2016 , 37 (2 ): 404 -423 .
DOI:10.1002/oca.2176
URL
[本文引用: 1]
[10]
LIU W W LIU Y C BUCKNALL R A robust localization method for unmanned surface vehicle (USV) navigation using fuzzy adaptive Kalman filtering
[J]. IEEE Access , 2019 , 7 : 46071 -46083 .
DOI:10.1109/ACCESS.2019.2909151
URL
[本文引用: 1]
[11]
GAO X L LUO H Y BAO B K et al RL-AKF: An adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles
[J]. Remote Sensing , 2020 , 12 (11 ): 1704 .
DOI:10.3390/rs12111704
URL
[本文引用: 1]
[13]
卞鸿巍 , 金志华 , 王俊璞 , 等 . 组合导航系统新息自适应卡尔曼滤波算法
[J]. 上海交通大学学报 , 2006 , 40 (6 ): 1000 -1003 .
[本文引用: 1]
BIAN Hongwei JIN Zhihua WANG Junpu et al The innovation-based estimation adaptive Kalman filter algorithm for INS/GPS integrated navigation system
[J]. Journal of Shanghai Jiao Tong University , 2006 , 40 (6 ): 1000 -1003 .
[本文引用: 1]
[14]
HUANG B H WANG J J ZHANG J F et al Variational bayesian adaptive Kalman filter for integrated navigation with unknown process noise covariance
[C]∥2022 2nd International Conference on Consumer Electronics and Computer Engineering . Guangzhou, China : IEEE , 2022 : 436 -443 .
[本文引用: 1]
[15]
ZHANG J WANG S P LI W S et al A multi-mode switching variational bayesian adaptive Kalman filter algorithm for the SINS/PNS/GMNS navigation system of pelagic ships
[J]. Sensors (Basel, Switzerland) , 2022 , 22 (9 ): 3372 .
DOI:10.3390/s22093372
URL
[本文引用: 1]
[16]
ZHANG X Y DUAN H B LUO Q N Levenberg-Marquardt based artificial physics method for mobile robot oscillation alleviation
[J]. Science China Physics Mechanics Astronomy , 2014 , 57 (9 ): 1771 -1777 .
DOI:10.1007/s11433-013-5244-9
URL
[本文引用: 1]
[17]
DUXBURY T C BORN G H JERATH N Viewing phobos and deimos for navigating mariner
[J]. Journal of Spacecraft and Rockets , 1974 , 11 (4 ): 215 -222 .
DOI:10.2514/3.62046
URL
[本文引用: 1]
[18]
LEE D J ALFRIEND K Adaptive sigma point filtering for state and parameter estimation
[C]∥AIAA/AAS Astrodynamics Specialist Conference and Exhibit . Providence, Rhode Island, USA : AIAA , 2004 : 1 -20 .
[本文引用: 3]
[19]
BUSSE F D HOW J P SIMPSON J Demonstration of adaptive extended Kalman filter for low-Earth-orbit formation estimation using CDGPS
[J]. Navigation , 2003 , 50 (2 ): 79 -93 .
DOI:10.1002/j.2161-4296.2003.tb00320.x
URL
[本文引用: 2]
1
2011
... 深空探测器在着陆目标行星之前将经历巡航段、接近段、环绕轨道段.与相对稳定的巡航和环绕轨道段相比,接近段至关重要,决定了航天器能否进入围绕目标行星的预定轨道[1 -2 ] .导航系统作为深空探测任务的重要组成部分,直接影响深空探测器的运行状态[3 ] .一般来说,在接近段,导航系统的位置精度为1~10 km,而每次轨道确定所需的无线电测量和延迟时间为10~100 min.因此,深空探测器导航系统的精度和实时性是保证深空探测任务成功的两个重要因素. ...
1
2011
... 深空探测器在着陆目标行星之前将经历巡航段、接近段、环绕轨道段.与相对稳定的巡航和环绕轨道段相比,接近段至关重要,决定了航天器能否进入围绕目标行星的预定轨道[1 -2 ] .导航系统作为深空探测任务的重要组成部分,直接影响深空探测器的运行状态[3 ] .一般来说,在接近段,导航系统的位置精度为1~10 km,而每次轨道确定所需的无线电测量和延迟时间为10~100 min.因此,深空探测器导航系统的精度和实时性是保证深空探测任务成功的两个重要因素. ...
1
2010
... 深空探测器在着陆目标行星之前将经历巡航段、接近段、环绕轨道段.与相对稳定的巡航和环绕轨道段相比,接近段至关重要,决定了航天器能否进入围绕目标行星的预定轨道[1 -2 ] .导航系统作为深空探测任务的重要组成部分,直接影响深空探测器的运行状态[3 ] .一般来说,在接近段,导航系统的位置精度为1~10 km,而每次轨道确定所需的无线电测量和延迟时间为10~100 min.因此,深空探测器导航系统的精度和实时性是保证深空探测任务成功的两个重要因素. ...
1
2010
... 深空探测器在着陆目标行星之前将经历巡航段、接近段、环绕轨道段.与相对稳定的巡航和环绕轨道段相比,接近段至关重要,决定了航天器能否进入围绕目标行星的预定轨道[1 -2 ] .导航系统作为深空探测任务的重要组成部分,直接影响深空探测器的运行状态[3 ] .一般来说,在接近段,导航系统的位置精度为1~10 km,而每次轨道确定所需的无线电测量和延迟时间为10~100 min.因此,深空探测器导航系统的精度和实时性是保证深空探测任务成功的两个重要因素. ...
Design and optimization of navigation and guidance techniques for Mars pinpoint landing: Review and prospect
1
2017
... 深空探测器在着陆目标行星之前将经历巡航段、接近段、环绕轨道段.与相对稳定的巡航和环绕轨道段相比,接近段至关重要,决定了航天器能否进入围绕目标行星的预定轨道[1 -2 ] .导航系统作为深空探测任务的重要组成部分,直接影响深空探测器的运行状态[3 ] .一般来说,在接近段,导航系统的位置精度为1~10 km,而每次轨道确定所需的无线电测量和延迟时间为10~100 min.因此,深空探测器导航系统的精度和实时性是保证深空探测任务成功的两个重要因素. ...
Analysis of orbital dynamic equation in navigation for a Mars gravity-assist mission
1
2012
... 天文导航是深空中使用的主要自主导航方法之一,包括水手号和旅行者号在内的航天器都使用天文导航.深空探测器的自主导航系统一般由轨道动力学、量测模型和最优状态估计方法组成.滤波方法对导航系统的性能至关重要,它决定了参数估计的准确性和实时性.为获得深空探测器的位置和速度,模型加速度通过数值积分器融合到滤波器中,通常采用具有固定步长的四阶龙格库塔积分法[4 -5 ] . ...
Autonomous navigation for deep space missions
1
2012
... 天文导航是深空中使用的主要自主导航方法之一,包括水手号和旅行者号在内的航天器都使用天文导航.深空探测器的自主导航系统一般由轨道动力学、量测模型和最优状态估计方法组成.滤波方法对导航系统的性能至关重要,它决定了参数估计的准确性和实时性.为获得深空探测器的位置和速度,模型加速度通过数值积分器融合到滤波器中,通常采用具有固定步长的四阶龙格库塔积分法[4 -5 ] . ...
YANG Y, Study on innovation adaptive EKF for in-flight alignment of airborne POS
2
2011
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
... [6 ]提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
Analysis of ephemeris errors in autonomous celestial navigation during Mars approach phase
3
2017
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
... [7 ]根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
... 深空探测器在接近目标行星时沿双曲线轨道移动,其中心天体是目标行星,太阳和其他行星被认为是扰动.此外,太阳光压辐射和推进器脉冲等因素也会影响探测器的运动.考虑以上因素,以火星为目标天体,火心惯性坐标系统中的轨道动力学方程可描述如下[7 ] : ...
Adaptively tuning sampling weights of the unscented Kalman filter in starlight refraction navigation
1
2017
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
Multiple-model adaptive estimation for space surveillance with measurement uncertainty
1
2016
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
A robust localization method for unmanned surface vehicle (USV) navigation using fuzzy adaptive Kalman filtering
1
2019
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
RL-AKF: An adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles
1
2020
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation
1
2021
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
组合导航系统新息自适应卡尔曼滤波算法
1
2006
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
组合导航系统新息自适应卡尔曼滤波算法
1
2006
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
Variational bayesian adaptive Kalman filter for integrated navigation with unknown process noise covariance
1
2022
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
A multi-mode switching variational bayesian adaptive Kalman filter algorithm for the SINS/PNS/GMNS navigation system of pelagic ships
1
2022
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
Levenberg-Marquardt based artificial physics method for mobile robot oscillation alleviation
1
2014
... 对于无法准确估计噪声的问题,很多学者进行了研究并提出3类解决方法[6 ⇓ -8 ] :基于协方差估计的滤波方法、方差匹配方法和多模型自适应方法.Fang等[6 ] 提出一种基于新息的自适应扩展卡尔曼滤波方法,以提高全球定位系统的对准精度.Ning等[7 ] 根据新息序列和残差序列的变化,提出一种具有自适应测量噪声协方差的无迹卡尔曼滤波器(Unscented Kalman Filter, UKF).Xiong等[9 ] 提出一种多模型自适应估计方法,用于未知系统噪声统计特性和测量不确定度的系统.然而,这种方法很难防止滤波器发散,更换状态模型会导致精度降低.Liu等[10 ] 使用模糊自适应无迹卡尔曼滤波解决车辆惯性导航的问题.Gao等[11 ] 提出基于强化学习的自适应卡尔曼滤波方法.Fraser等[12 ] 提出基于残差的模糊自适应扩展卡尔曼滤波方法.卞鸿巍等[13 ] 使用基于新息的卡尔曼滤波算法提高了舰用组合系统的性能.Huang等[14 ] 在惯性/卫星组合导航中使用变分自适应卡尔曼滤波算法.Zhang等[15 ] 使用多模态变分自适应卡尔曼滤波船舶组合导航系统的量测噪声.这种方法设计的滤波系统复杂,计算量较大.此外,Zhang等[16 ] 使用一种非线性优化方法解决了复杂环境下移动机器人的自主导航问题. ...
Viewing phobos and deimos for navigating mariner
1
1974
... 背景恒星和火星、火卫一、火卫二之间的星光角距可作为量测量[17 ] .如图1 所示,本文使用行星敏感器得出恒星与目标行星之间的角度.图中:θ p i θ d i i 颗恒星与火卫一、火卫二之间的角度;l pp , l pd 分别为火卫一、火卫二到探测器的视线矢量;s p i i 颗恒星在火卫一传感器视场的矢量. ...
Adaptive sigma point filtering for state and parameter estimation
3
2004
... 在确定的滤波器参数情况下,状态估计可能会有很大的估计误差.在实际应用中,量测噪声Rk 可以根据传感器误差获取. 与量测噪声相比,系统模型误差很难准确获取,因此实际应用中需要自适应地估计过程噪声协方差Qk . 假设过程噪声和量测噪声是零均值可加性的高斯白噪声,且量测噪声Rk 是已知的恒定噪声. 利用Maybeck的自适应线性卡尔曼滤波方法[18 ] 建立AQUKF方法,对Qk 的估计进行平稳化处理,使其在一个滑动窗口内是平稳的,并且k 时刻的状态噪声估计 Q ^ k k -N +1,k ]区间的差值,避免因某一时刻Qk 的突变而产生较大误差,并将改进方法与UKF方法相结合应用在火星探测器中. ...
... 式中:ωQ 为每次更新时的权重,如果ωQ 较小表示每次更新更倾向于与 Q ^ k - 1 ωQ 较大表示相邻时刻之间Qk 发生较大变化. 因此该自适应方法的性能对权重ωQ 的选择非常敏感,Busse等[19 ] 采用试错法来选择合适的ωQ ,但是所消耗的时间长,且没有一个直接的指标来衡量不同ωQ 的优良性;Lee等[18 ] 采用下降单纯性法来优化关于ωQ 的目标函数,但是计算量较大.另外,文献[18 -19 ]只是针对ωQ 的选择采用不同的方法,没有改变模型对ωQ 的依赖性,方法性能仍然对ωQ 很敏感. ...
... 的目标函数,但是计算量较大.另外,文献[18 -19 ]只是针对ωQ 的选择采用不同的方法,没有改变模型对ωQ 的依赖性,方法性能仍然对ωQ 很敏感. ...
Demonstration of adaptive extended Kalman filter for low-Earth-orbit formation estimation using CDGPS
2
2003
... 式中:ωQ 为每次更新时的权重,如果ωQ 较小表示每次更新更倾向于与 Q ^ k - 1 ωQ 较大表示相邻时刻之间Qk 发生较大变化. 因此该自适应方法的性能对权重ωQ 的选择非常敏感,Busse等[19 ] 采用试错法来选择合适的ωQ ,但是所消耗的时间长,且没有一个直接的指标来衡量不同ωQ 的优良性;Lee等[18 ] 采用下降单纯性法来优化关于ωQ 的目标函数,但是计算量较大.另外,文献[18 -19 ]只是针对ωQ 的选择采用不同的方法,没有改变模型对ωQ 的依赖性,方法性能仍然对ωQ 很敏感. ...
... -19 ]只是针对ωQ 的选择采用不同的方法,没有改变模型对ωQ 的依赖性,方法性能仍然对ωQ 很敏感. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}