上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (8): 1018-1026.doi: 10.16183/j.cnki.jsjtu.2020.207
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
滕亚军a, 陈务军a( ), 杨天洋a, 敬忠良b, 刘物己b
), 杨天洋a, 敬忠良b, 刘物己b
收稿日期:2020-07-08
出版日期:2021-08-28
发布日期:2021-08-31
通讯作者:
陈务军
E-mail:cwj@sjtu.edu.cn
作者简介:滕亚军(1997-),男,四川省南充市人,硕士生,研究方向为软体机器人
基金资助:
TENG Yajuna, CHEN Wujuna(), YANG Tianyanga, JING Zhongliangb, LIU Wujib
Received:2020-07-08
Online:2021-08-28
Published:2021-08-31
Contact:
CHEN Wujun
E-mail:cwj@sjtu.edu.cn
摘要:
结合由智能材料驱动的柔性机器人与正八面体可变几何桁架体系,以正八面体可变几何桁架体系为理论基础,以并联形状记忆合金(SMA)弹簧作为结构驱动体系,设计单节柔性单元.通过几何法建立运动学模型,分析柔性操控臂的动能、弹性势能和重力势能,基于拉格朗日动力学方法获得动力学普遍方程.运用MATLAB软件计算得到单节柔性单元SMA弹簧的驱动力.进行Adams仿真,计算结果和理论计算结果吻合得较好.最后,制作单节柔性操控臂样机并测量不同电流下的转动角度.建模和仿真方法对于其他类型机器人具有借鉴意义.
中图分类号:
滕亚军, 陈务军, 杨天洋, 敬忠良, 刘物己. SMA弹簧驱动的柔性操控臂动力学分析[J]. 上海交通大学学报, 2021, 55(8): 1018-1026.
TENG Yajun, CHEN Wujun, YANG Tianyang, JING Zhongliang, LIU Wuji. Dynamics Analysis of Flexible Manipulator Driven by SMA Spring[J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 1018-1026.
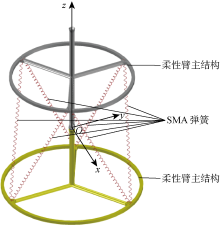
图1
柔性操控臂模块
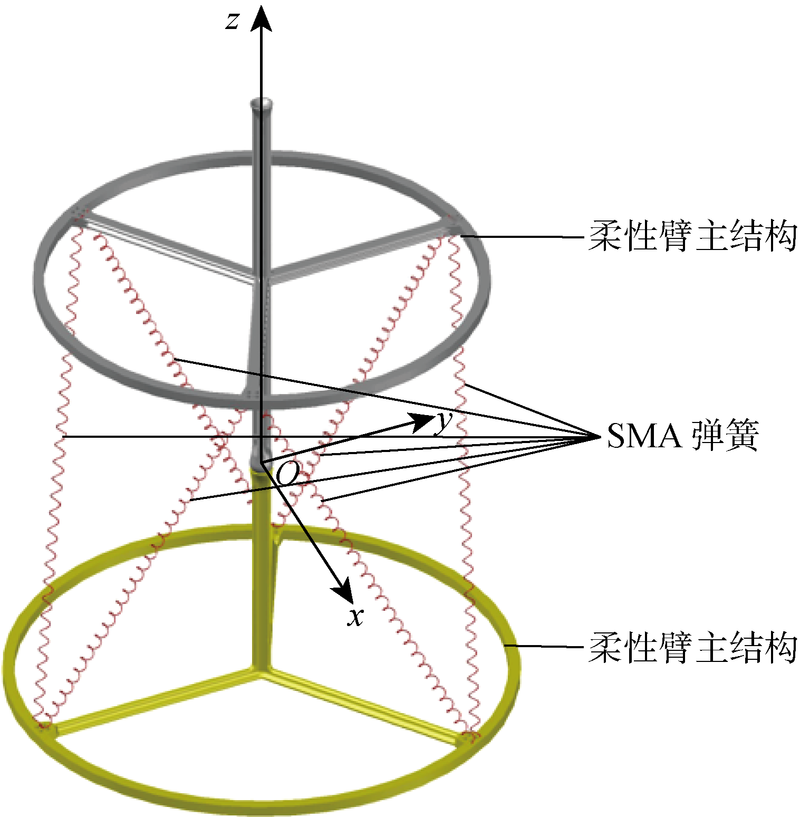
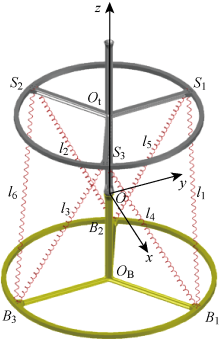
图2
柔性臂坐标系
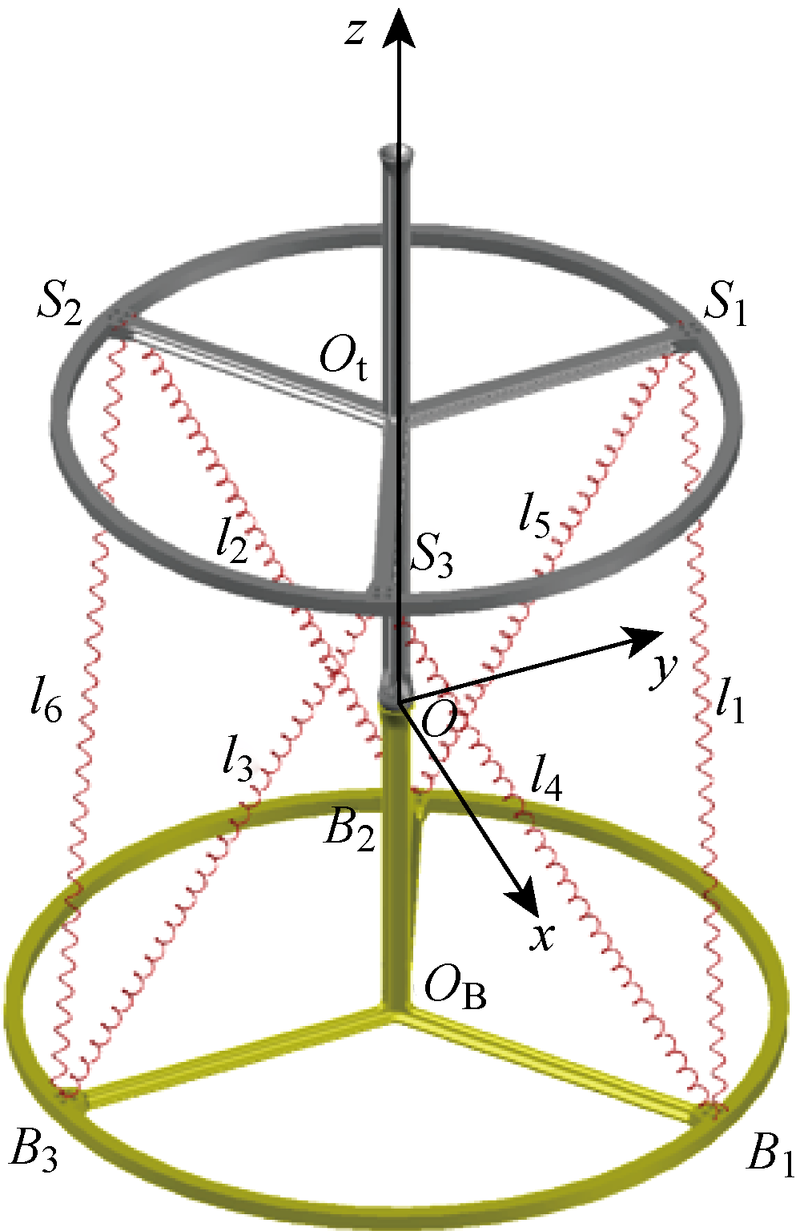
表1
建模参数
| 参数 | 取值 |
|---|---|
| rB/mm | 172 |
| rt/mm | 157 |
| θ1、θ2、θ3/(°) | 45 |
| θB/(°) | 133 |
| xc/mm | 0 |
| yc/mm | 0 |
| zc/mm | 112 |
| φ1/(°) | 90 |
| φ2/(°) | 210 |
| φ3/(°) | 330 |
| mt/kg | 0.1 |
| Jx/(kg·m2) | 674.62 |
| Jy/(kg·m2) | 438.31 |
| Jz/(kg·m2) | 572.10 |
| d/mm | 0.51 |
| r/mm | 1.725 |
| n | 135 |
表2
SMA弹簧材料参数
| 参数 | 取值 |
|---|---|
| EA/GPa | 21.6 |
| EM/GPa | 8.8 |
| ν | 0.33 |
| εL | 0.067 |
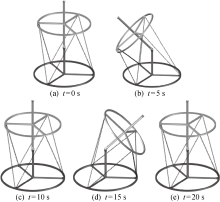
图3
当Ψ= π 4时的柔性臂运动形态
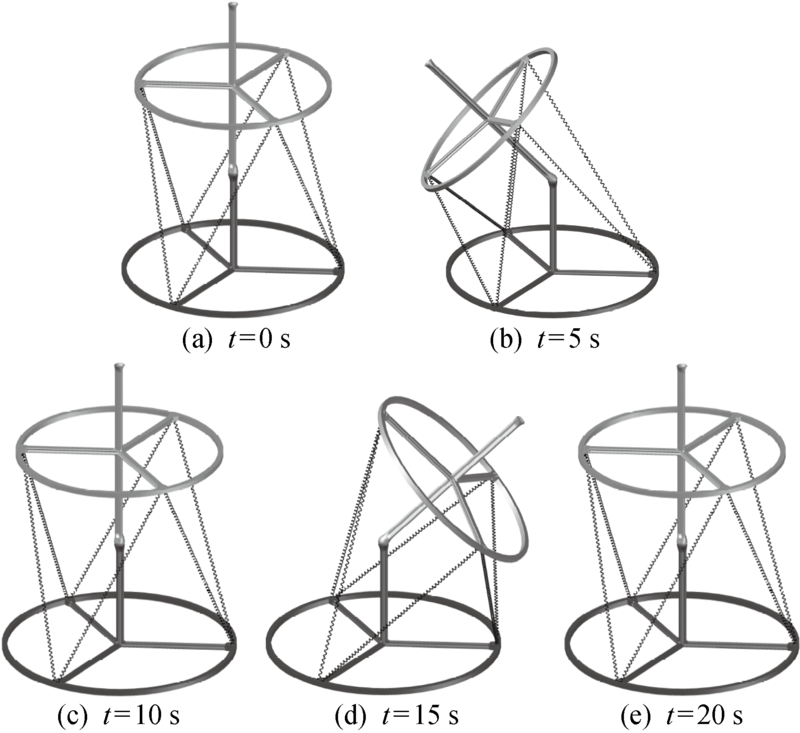
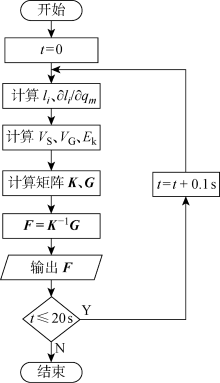
图4
计算流程图
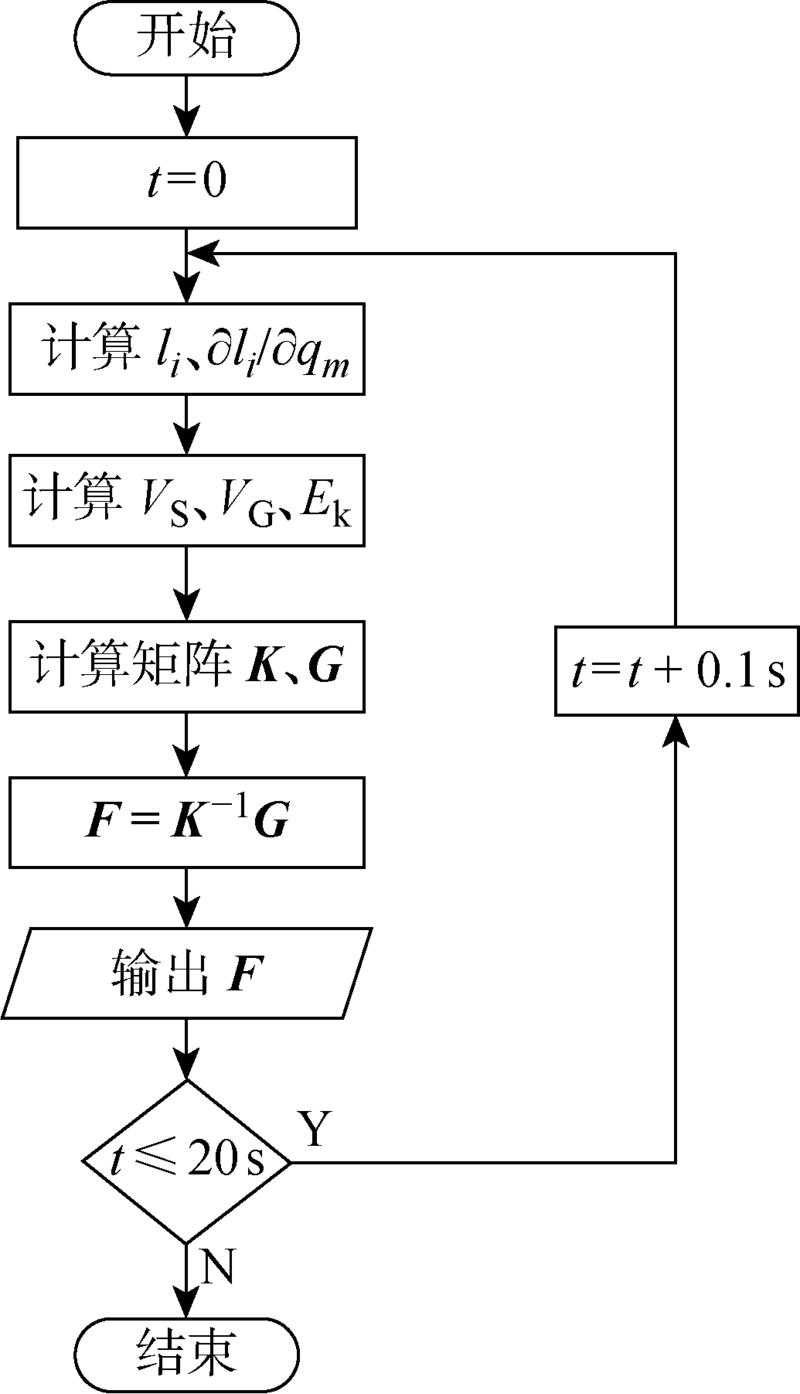
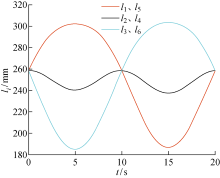
图5
当Ψ=π/4时的SMA弹簧长度
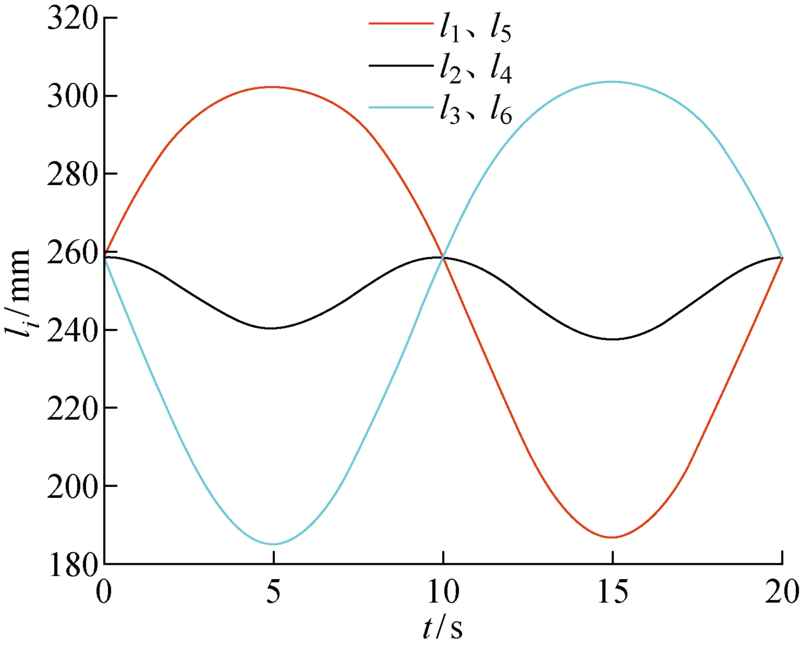

图6
当Ψ=π/4时的SMA弹簧力
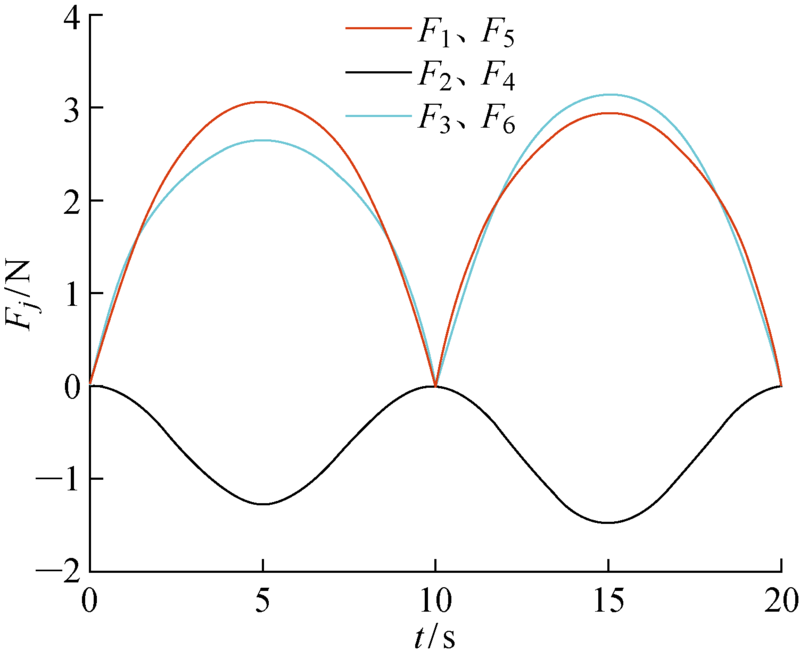
图7
当Ψ=π/4时的l3、l6马氏体体积分数
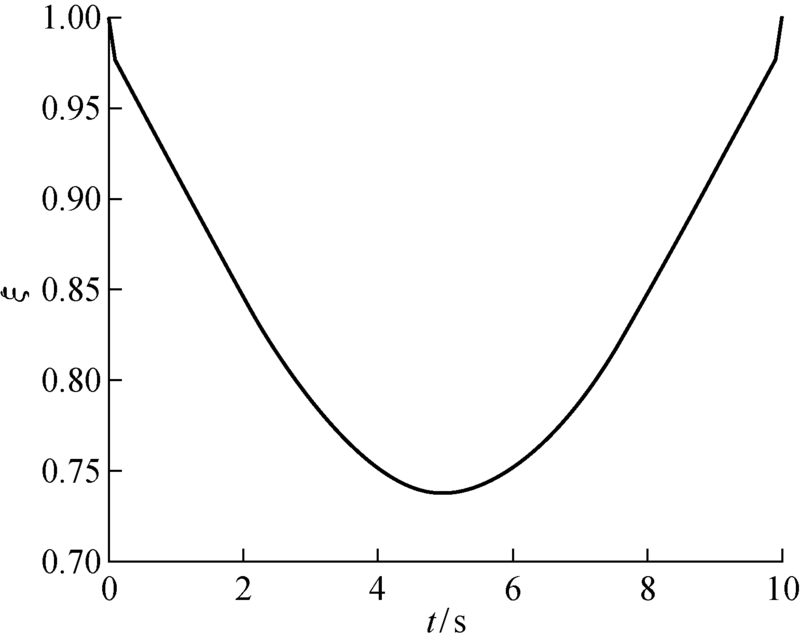
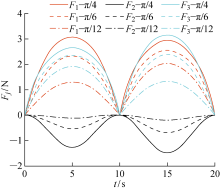
图8
Ψ=π/4, π/6, π/12时SMA弹簧力
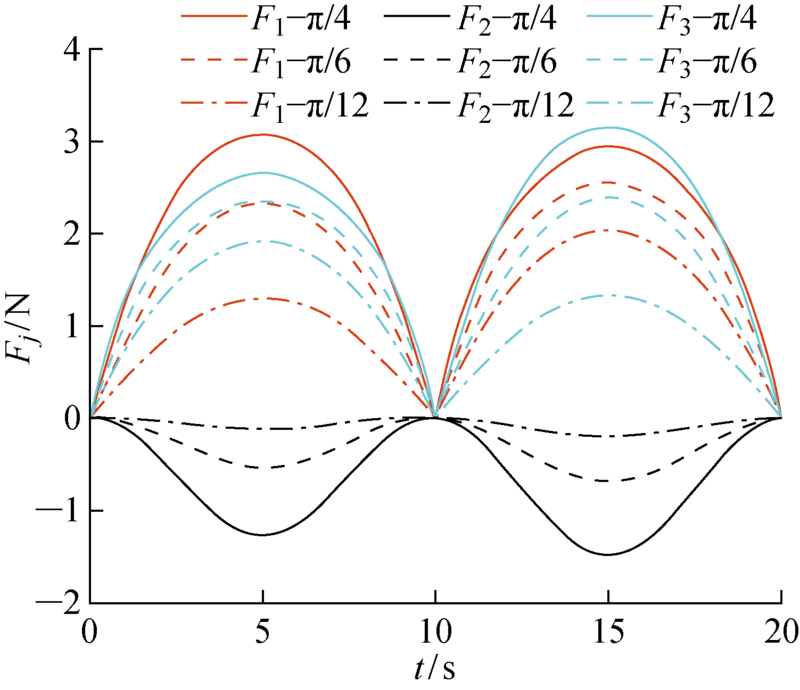
表3
SMA弹簧力最大值
| Ψ | Fmax/N | Fmin/N |
|---|---|---|
| π/4 | 3.1 | -1.5 |
| π/6 | 2.6 | -0.7 |
| π/12 | 2.0 | 0.2 |
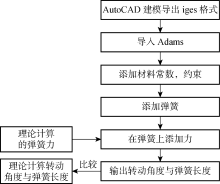
图9
Adams仿真计算流程图
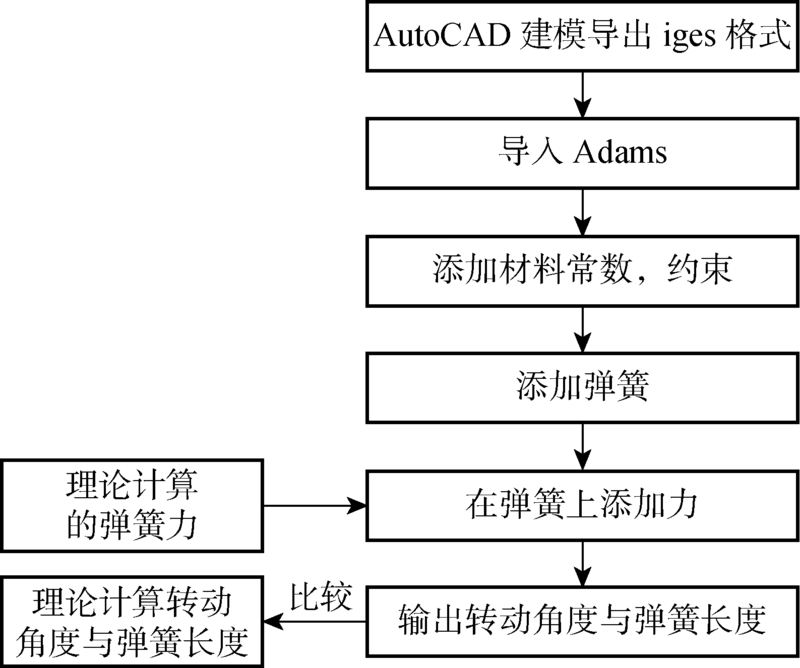
图10
α与t的关系
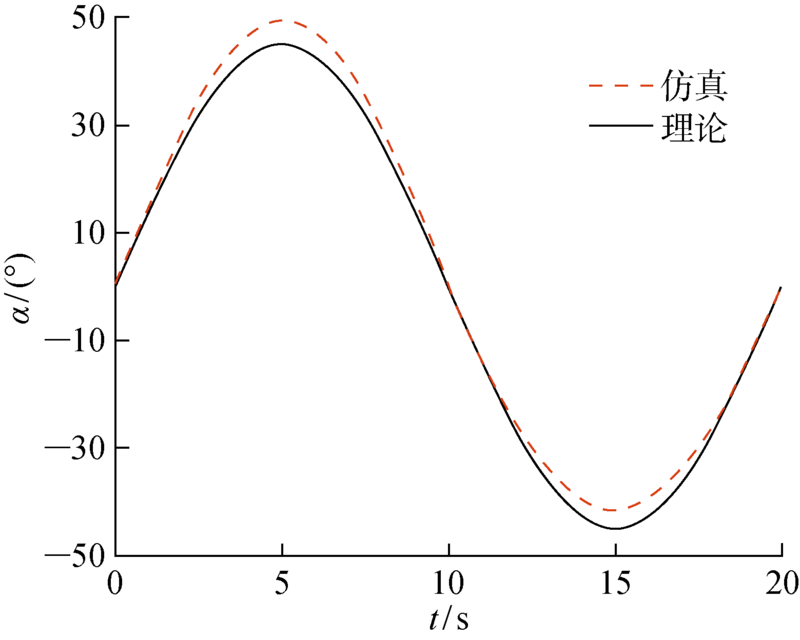
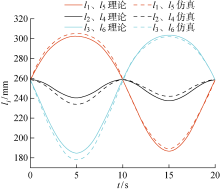
图11
li与t的关系
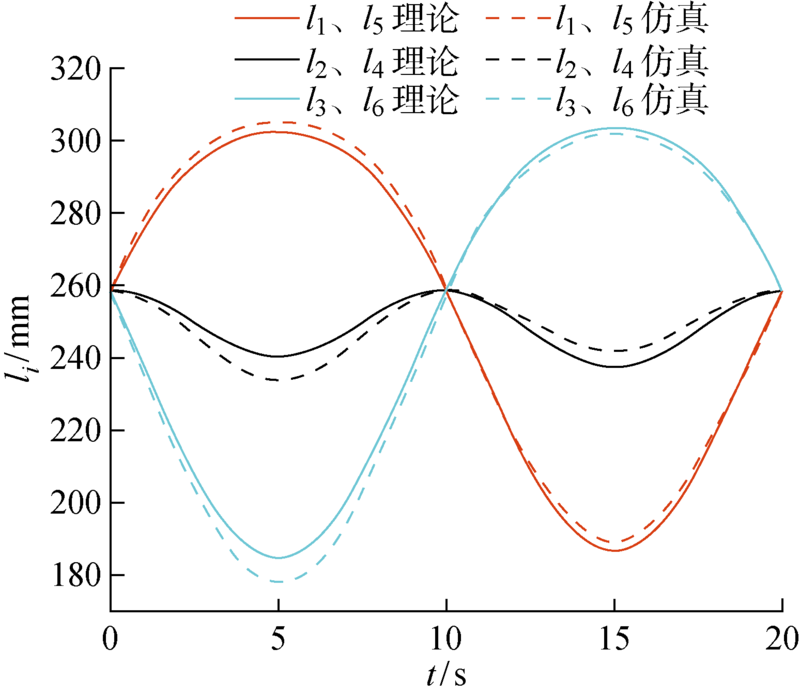
图12
柔性操控臂模块样机
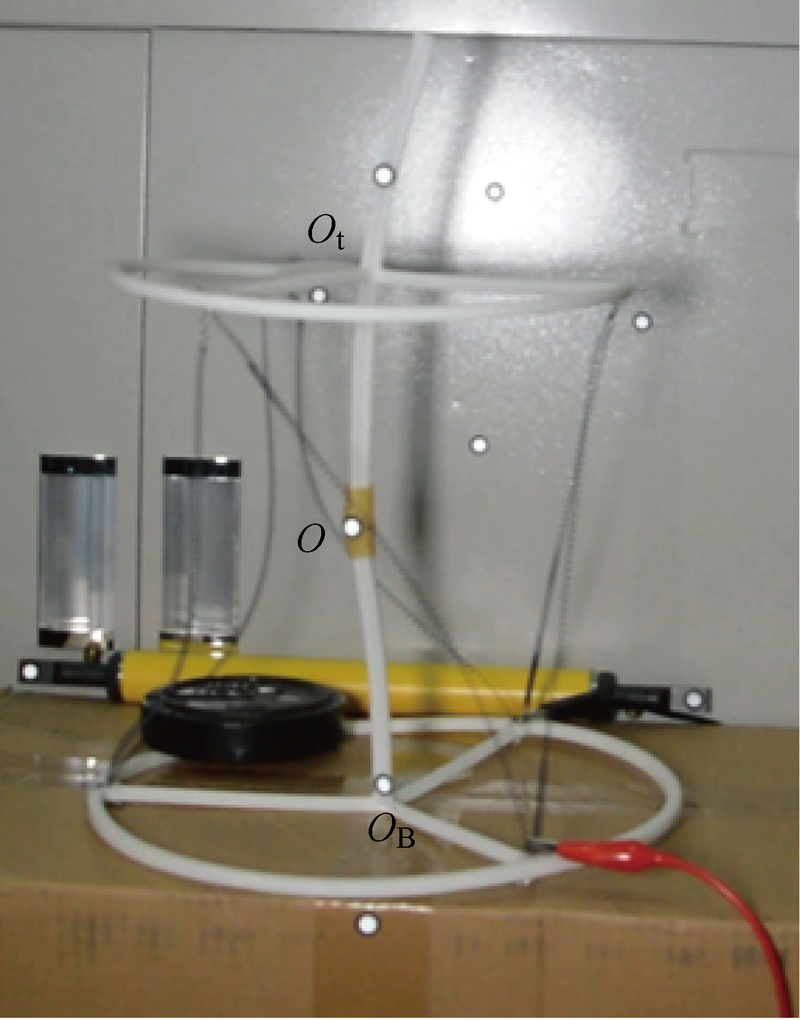
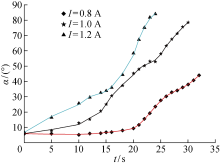
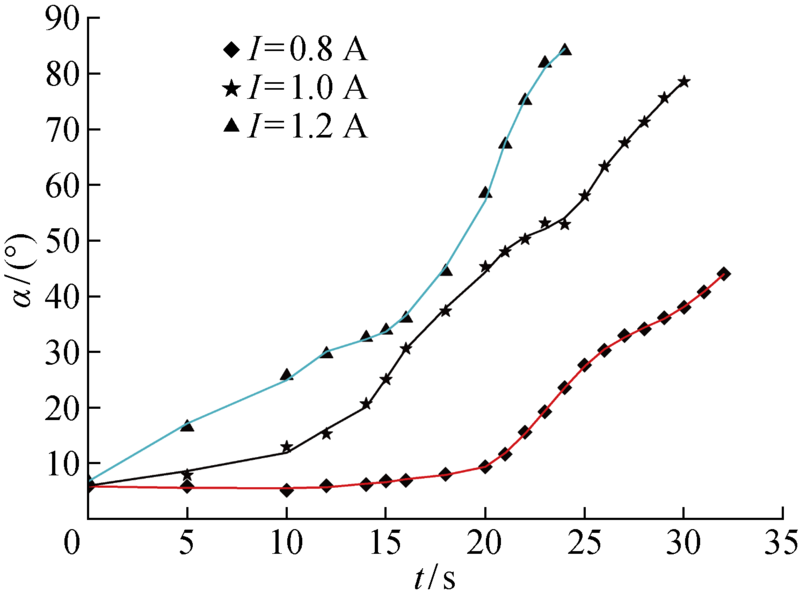
图13
实验中α与t的关系
| [1] |
MOSADEGH B, POLYGERINOS P, KEPLINGER C, et al. Pneumatic networks for soft robotics that actuate rapidly[J]. Advanced Functional Materials, 2014, 24(15):2163-2170.
doi: 10.1002/adfm.v24.15 URL |
| [2] | MOHD JANI J, LEARY M, SUBIC A, et al. A review of shape memory alloy research, applications and opportunities[J]. Materials & Design (1980-2015), 2014, 56:1078-1113. |
| [3] | MAO S X, DONG E B, ZHANG S W, et al. A new soft bionic starfish robot with multi-gaits[C]//2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Wollongong, NSW, Australia: IEEE, 2013: 1312-1317. |
| [4] | MAO S X, DONG E B, XU M, et al. Design and development of starfish-like robot: Soft bionic platform with multi-motion using SMA actuators[C]//2013 IEEE International Conference on Robotics and Biomimetics. Shenzhen, China: IEEE, 2013: 91-96. |
| [5] | 毛世鑫. 辐射对称仿生柔体机器人协同推进机理及实现技术[D]. 合肥: 中国科学技术大学, 2014. |
| MAO Shixin. The cooperative propulsion mechanism and realization technology of actinomorphic bionic soft robot[D]. Hefei: University of Science and Technology of China, 2014. | |
| [6] | 冷劲松, 兰鑫, 刘彦菊, 等. 形状记忆聚合物复合材料及其在空间可展开结构中的应用[J]. 宇航学报, 2010, 31(4):950-956. |
| LENG Jinsong, LAN Xin, LIU Yanju, et al. Shape memory polymers composites and their applications in deployable structures[J]. Journal of Astronautics, 2010, 31(4):950-956. | |
| [7] | 金虎. 一种可模块化组装柔体机器人的柔性智能模块化结构[D]. 合肥: 中国科学技术大学, 2016. |
| JIN Hu. Soft and smart modular structure as tantacles for soft robots[D]. Hefei: University of Science and Technology of China, 2016. | |
| [8] |
MARTINEZ R V, GLAVAN A C, KEPLINGER C, et al. Soft actuators and robots that are resistant to mechanical damage[J]. Advanced Functional Materials, 2014, 24(20):3003-3010.
doi: 10.1002/adfm.v24.20 URL |
| [9] | MCMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the OctArm continuum manipulator[C]//2006 IEEE International Conference on Robotics and Automation. Orlando, FL, USA: IEEE, 2006: 2336-2341. |
| [10] | CHOI D G, YI B J, KIM W K. Design of a spring backbone micro endoscope[C]//2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA: IEEE, 2007: 1815-1821. |
| [11] | 胡海燕, 王鹏飞, 孙立宁, 等. 线驱动连续型机器人的运动学分析与仿真[J]. 机械工程学报, 2010, 46(19):1-8. |
| HU Haiyan, WANG Pengfei, SUN Lining, et al. Kinematic analysis and simulation for cable-driven continuum robot[J]. Journal of Mechanical Engineering, 2010, 46(19):1-8. | |
| [12] | SATO M, FUKAYA M, IWASAKI T. Serpentine locomotion with robotic snakes[J]. IEEE Control Systems Magazine, 2002, 22(1):64-81. |
| [13] | MA S, TADOKORO N, INOUE K, et al. Influence of inclining angle of a slope to optimal locomotion curves of a snake-like robot[C]//IEEE International Conference on Robotics, Intelligent Systems and Signal Processing. Changsha, China: IEEE, 2003, 1:353-358. |
| [14] |
REZAPOUR E, PETTERSEN K Y, LILJEBÄCK P, et al. Path following control of planar snake robots using virtual holonomic constraints: Theory and experiments[J]. Robotics and Biomimetics, 2014, 1(1):3.
doi: 10.1186/s40638-014-0003-6 URL |
| [15] |
PRAUTSCH P, MITA T, IWASAKI T. Analysis and control of a gait of snake robot[J]. IEEJ Transactions on Industry Applications, 2000, 120(3):372-381.
doi: 10.1541/ieejias.120.372 URL |
| [16] | 丁希仑, 张启先. 机器人柔性臂动力学建模的D-Holzer法[J]. 机械工程学报, 1999, 35(3):25. |
| DING Xilun, ZHANG Qixian. A new dynamic modeling method of D-Holzer of the flexible manipulator[J]. Chinese Journal of Mechanical Engineering, 1999, 35(3):25. | |
| [17] | 贾林睿, 张祎贝, 陈务军, 等. 八面体单元变几何桁架设计与分析[C]//第十七届全国现代结构工程学术研讨会. 天津: 天津大学, 2017: 485-492. |
| JIA Linrui, ZHANG Yibei, CHEN Wujun, et al. Design and analysis of octahedral variable geometry truss[C]//17th National Symposium on Modern Structural Engineering. Tianjin: Tianjin University, 2017: 485-492. | |
| [18] | TANAKA K. A thermomechanical sketch of shape memory effect: One-dimensional tensile behavior[J]. Res Mechanica, 1986, 18(3):251-263. |
| [19] |
LIANG C, ROGERS C A. A multi-dimensional constitutive model for shape memory alloys[J]. Journal of Engineering Mathematics, 1992, 26(3):429-443.
doi: 10.1007/BF00042744 URL |
| [20] |
LIANG C, ROGERS C A. One-dimensional thermomechanical constitutive relations for shape memory materials[J]. Journal of Intelligent Material Systems and Structures, 1990, 1(2):207-234.
doi: 10.1177/1045389X9000100205 URL |
| [21] |
BRINSON L C. One-dimensional constitutive behavior of shape memory alloys: Thermomechanical derivation with non-constant material functions and redefined martensite internal variable[J]. Journal of Intelligent Material Systems and Structures, 1993, 4(2):229-242.
doi: 10.1177/1045389X9300400213 URL |
| [22] | 李尚荣. NiTi记忆合金动态特性实验研究及其在仿生机器鱼上的应用[D]. 合肥: 中国科学技术大学, 2006. |
| LI Shangrong. Experiment research of dynamic property for nitonial memory alloy and its application of actuator for biomimetic robot fish[D]. Hefei: University of Science and Technology of China, 2006. |
| [1] | 宋深科, 夏立, 邹早建, 邹璐. 大型邮轮与集装箱船水动力相互作用数值研究[J]. 上海交通大学学报, 2022, 56(7): 919-928. |
| [2] | 王沙沙, 张翔宇, 邱国志, 龚景海. 一种分析膜面在积水荷载作用下响应的数值模型[J]. 上海交通大学学报, 2022, 56(6): 730-738. |
| [3] | 孙健, 彭斌, 朱兵国. 无油双涡圈空气涡旋压缩机的数值模拟及试验研究[J]. 上海交通大学学报, 2022, 56(5): 611-621. |
| [4] | 唐耿林, 李建军, 李元辉, 张珑耀, 朱文峰. 基于胶层填充的薄板包边成形数值模拟及实验研究[J]. 上海交通大学学报, 2022, 56(4): 523-531. |
| [5] | 李元辉, 李建军, 王顺超, 张珑耀, 朱文峰. 铝合金薄板含胶滚压成形工艺建模及实验[J]. 上海交通大学学报, 2022, 56(4): 532-542. |
| [6] | 王超, 杨波, 张媛, 郭春雨, 叶礼裕. 冰柱冲击问题的数值仿真分析[J]. 上海交通大学学报, 2022, 56(3): 368-378. |
| [7] | 胡金硕, 黄健哲. 共轴双旋翼动力学建模与验证[J]. 上海交通大学学报, 2022, 56(3): 395-402. |
| [8] | 高昌昊, 宋文萍, 韩少强, 路宽, 王跃, 叶坤. 空空导弹过失速重新定向技术研究[J]. 空天防御, 2022, 5(3): 17-26. |
| [9] | 王 屹. 单点吊装作业视景仿真应用研究[J]. 海洋工程装备与技术, 2022, 9(2): 38-42. |
| [10] | 何清波,姜添曦. 人工智能可以通过操纵波来实现吗?[J]. 上海交通大学学报, 2021, 55(Sup.1): 1-2. |
| [11] | 肖飞,金学军. 如何实现固态材料变形制冷?[J]. 上海交通大学学报, 2021, 55(Sup.1): 95-96. |
| [12] | 姚振威. 如何通过拓扑缺陷概念推进对凝聚态物质的理解?[J]. 上海交通大学学报, 2021, 55(Sup.1): 106-107. |
| [13] | 张金柯, 缪光武, 金佳敏, 陈银飞, 卢晗锋, 宁文生, 白占旗, 刘武灿. R115/NaX的吸附动力学及其因素显著性分析[J]. 上海交通大学学报, 2021, 55(9): 1071-1079. |
| [14] | 李昂, 孙仁. 螺旋列板立管受迫振动时的水动力学研究[J]. 上海交通大学学报, 2021, 55(8): 907-915. |
| [15] | 张晨雅, 寇雨丰, 吕海宁, 肖龙飞, 刘明月. 经典式Spar平台涡激运动与驰振特性的对比试验[J]. 上海交通大学学报, 2021, 55(5): 497-504. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 822
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 1074
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||