

为提升配电网的电压稳定性,众多学者从不同角度设计控制方法,主要可划分为设备级控制和系统级控制两个层面.在设备级控制层面,最为常用的是逆变器无功功率-电压(Q-V)下垂控制[5-6],通过给具有电压调节能力的并网逆变器设计合适的Q-V下垂曲线,即可实现多逆变器之间的无功比例控制,确保电网在负荷波动、新能源出力波动等扰动下电压在较小范围内变化.然而,这种电压控制方法属于有差调节,无法消除母线电压偏差.为消除电压偏差,文献[7]中提出一种模型参考自适应比例积分微分控制方法,该方法通过设定参考模型,利用自适应环节对参数进行在线调整,从而使系统电压达到期望输出值,可有效抑制负载非线性动态和波动对电网电压的影响.为了对配电网中扰动对电压的影响进行直接补偿抑制,文献[8-9]中提出一种逆变器自抗扰控制方法,该控制器可实现 dq 轴电流解耦控制,提高逆变器在各谐波频率处的跟踪精度和抗扰性能,确保设备级电压有效控制.
在配网的系统级控制策略方面,通过多逆变器之间的协同动作可实现电网电压优化控制,其中分布式协同控制技术近年来得到较为广泛的研究[10-
为提高配电网多逆变器系统的电压稳定性,本文提出一种分布式协同抗扰控制策略,该策略的创新点主要包括:①基于反馈线性化技术将逆变器的高维复杂模型转换为等效模型,进而将模型不确定性、参数误差以及外部扰动等因素等效为集总扰动项,并通过高增益扩展状态观测器进行估计,降低了对模型精确性的要求;②根据一致性协同控制理论设计多逆变器的分布式协同抗扰控制策略,每个逆变器通过与邻居逆变器交换量测数据和观测器估计结果,实现全网电压协同控制和主动扰动抑制;③从图论和网络动态特性的角度提出通信拓扑优选方法,兼顾协同控制器网络的动态特性和通信系统成本.仿真结果表明,所提控制策略在系统参数存在误差的情况下,依旧能够实现多逆变器的电压协同跟踪调控.
1 逆变器非线性模型
逆变器模型包括电路模型和控制器模型两部分,如图1所示.图中:Rf、Lf、Cf分别为逆变器交流侧LC滤波器的电阻、电感和电容;Rg、Lg分别为逆变器等效并网电阻和电感;Vg、Vo、Vt分别为电网母线电压向量、逆变器并网点(point of common coupling, PCC)电压向量和逆变器交流侧母线电压向量;It为滤波器电流;Pm、Qm分别为变流器输出有功功率和无功功率的量测值; udq为电流控制环输出的d轴和q 轴控制信号;PWM代表最终所生成的脉宽调制波;G代表等值电网;上标*代表控制信号参考值,下标 dq分别代表d轴分量和q轴分量,abc 代表变量的三相正弦量.
图1
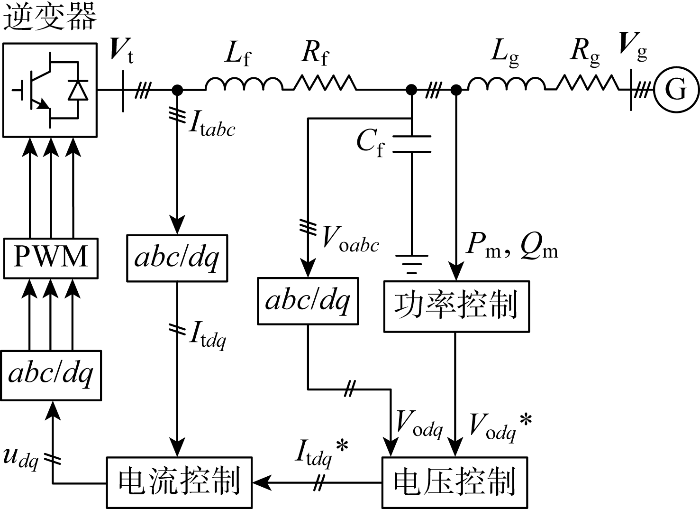
图1
逆变器基本控制结构
Fig.1
Classical control blocks of inverters in distribution grids
1.1 逆变器本体模型
图2
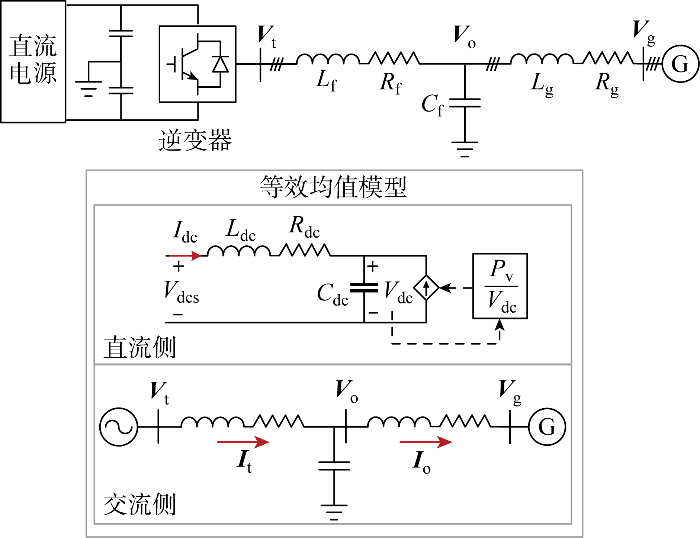
AVM模型由两部分构成,在直流侧,换流器等效为受控电流源:
式中:Pv为逆变器端口输出的有功功率;Rdc、Ldc分别为逆变器等效电阻和电感,可由桥臂电阻Rarm和桥臂电感Larm计算得到,即Rdc=2/3Rarm,Ldc=2/3Larm;Cdc为逆变器等效电容,可由子模块电容Carm计算得到,即Cdc=6Carm/N,N为子模块数量;Idc为直流电流;Vdcs、Vdc分别为直流电源电压和逆变器直流母线电压.
逆变器交流侧等效为受控电压源,其模型构建在dq同步旋转坐标系下,具体可写为
式中:ω为逆变器交流侧母线电压频率.
1.2 基本控制模型
图3
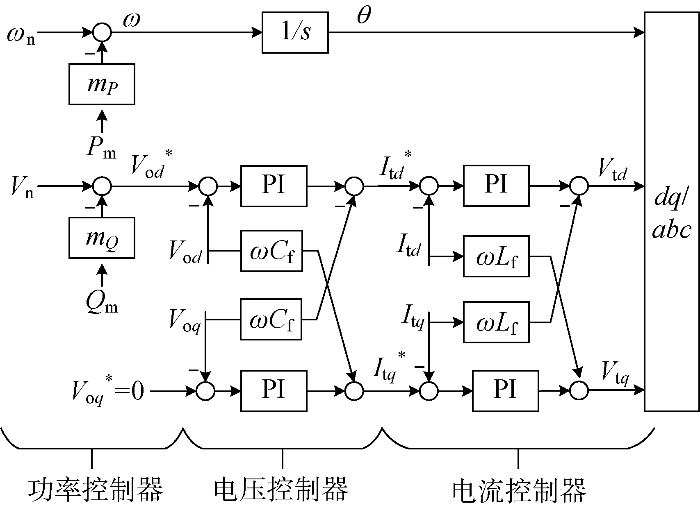
动态模型可表达为
式中:mP、mQ分别为有功、无功功率下垂系数;ωc为功率环滤波常数;θ为逆变器交流侧母线电压相位;ϕ、γ分别为电压和电流控制器内部状态变量;Kpc、Kic分别为电流控制器比例和积分系数;Kpv、Kiv分别为电压控制器比例和积分系数.
1.3 完整非线性模型
根据式(1)~(3),逆变器的完整非线性模型为
式中: x=[VdcIdcItd Itq Vod Voq Iod Ioq θ PmQmϕd ϕq γd γq]T为状态向量;D=[Vgd Vgq]T为网络扰动;f(x)、k(x)、g(x)分别为状态函数、网络扰动输入函数和控制输入函数;h(x) 为输出函数.
由于逆变器在锁相环作用下使交流测母线电压向量Vo与 d轴对齐,所以有Vod=Vo,Voq = 0.以逆变器并网点电压幅值为控制输出量,功率下垂控制器的输入Vn为控制输入信号,则模型式(4)中的输出量为y=Vod,控制输入信号为u=Vn. 由式(4)可知,逆变器的动态特性受到网络扰动D的影响,同时也受到逆变器模型本身误差影响,这些因素可能导致电压控制误差,在系统复杂扰动作用下引发振荡、失稳等问题.
2 分布式协同抗扰控制策略设计
分布式协同抗扰控制方法主要包括两部分,分别为本地抗扰控制器和分布式协同控制,总体框架如图4所示.图中: v为协同控制器输出控制信号;
图4
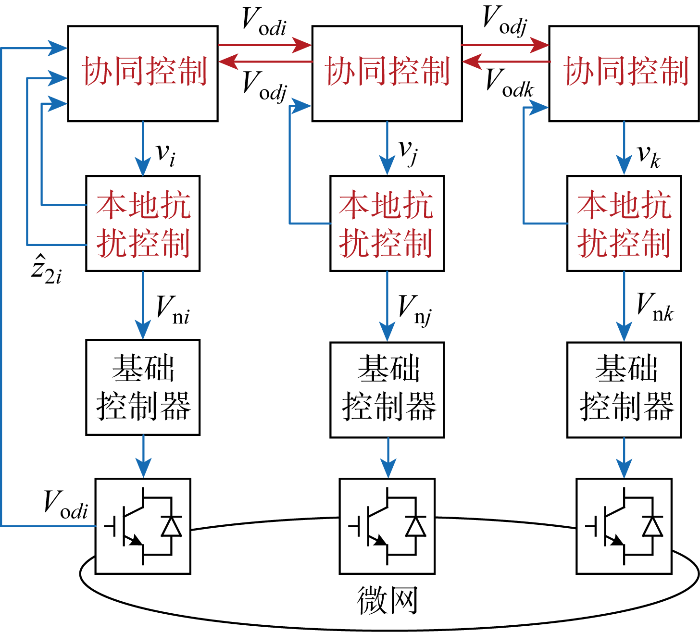
图4
分布式协同抗扰控制整体框架
Fig.4
Framework of distributed cooperative disturbance rejection control
2.1 本地抗扰控制器设计
为消除外部扰动和模型不确定性对逆变器控制性能的影响,利用反馈线性化技术得到逆变器控制输入Vn和逆变器并网点电压 Vod 之间的微分关系.根据式(4)所示的逆变器模型,利用Lie导数可求得该相对关系为
式中: F(x)=f(x)+k(x)D,LF(x)h(x)为F(x)对于h(x)的Lie导数,即
LF(x)h(x)=Δh(x)F(x)= (∂h(x)/∂x)F(x)
Lg(x)LF(x)h(x)=(∂(LF(x)h(x))/∂x)g(x)
由式(5)可知,逆变器并网点电压 Vod与控制信号Vn之间呈现二阶非线性微分关系.为消除式(5)中的非线性项
则控制输入信号可设计为
将式(7)代入式(5)中,则 Vod和附加控制信号v 之间呈现出二阶线性关系,即
由式(8)可知,在附加控制信号 v作用下,Vod 的二阶非线性动态式(5)简化为简单的线性动态,将式(8)整理为状态空间形式,有
式中: z1、z2为等效状态变量,z1=Vod,z2=
式(7)中
式中:
在式(11)的基础上,扩展一个新的状态变量 z3来表征集总扰动p, 扩展状态模型可写为
为估计集总扰动项p,基于高增益观测器设计扰动观测器为
式中:上标^代表各状态量的估计值; ε为一个较小的正实数,且0<ε≪1;h1~h3 为观测器增益.
观测器性能主要由观测器增益 h1~h3 决定,由于逆变器的输入-输出扩展状态模型式(13)为串联积分器形式,所以 h1~h3的选择应确保多项式s3+h1s2+h2s+h3=0 满足劳斯-赫尔维茨稳定判据,利用带宽整定法可计算合适的观测器增益:确定好观测器带宽 ωo,令s3+h1s2+h2s+h3=(s+ωo)2,即可求解得到h1~h3.
式(13)的状态量
因此,控制输入信号Vn可重新设计为
对比式(7)可以发现,式(15)所示的控制器无需系统精确模型和参数,利用集总扰动的估计值
需要说明的是,虽然利用反馈线性化技术所得到的输入-输出模型式(5)难以直接利用,但是该模型表明了逆变器控制输入和输出之间的相对阶,这是设计本地抗扰控制器的基础,因此利用反馈线性化技术对原始非线性模型式(4)进行处理十分有必要.然后,在模型式(5)的基础上才能进一步设计扰动观测器的结构,因此反馈线性化是扰动观测器设计的前置步骤,不可或缺.所提扰动观测器设计方法以电压外环-电流内环控制为基础,如果底层控制器为其他类型,虽然所设计的扰动观测器阶数可能会发生变化,但是所提出控制器设计方法和思路依然适用.
2.2 分布式协同控制器设计
分布式协同控制依赖于通信网络,通常用有向图对通信网络进行描述,各逆变器节点等效为图的节点,逆变器之间的通信链路可等效为节点之间的边 aij.当逆变器i与逆变器j之间存在通信链路时,aij=1,否则aij=0.整个通信网络拓扑由邻接矩阵Adj表示,即Adj=[aij]∈Rm×m,其中m为逆变器数量.单个逆变器所能访问的所有邻居总数为节点的入度,用矩阵Din表示,即Din=diag(di),其中di=
在本地抗扰控制器的基础上,进一步构建分布式协同控制器.选定一个逆变器作为主导逆变器,接受来自调度中心下发的电压控制参考指令
分布式协同控制的目标是设计式(15)中附加控制信号v,使所有逆变器交流母线电压收敛一致.为此,定义各逆变器与邻居之间的电压误差为
式中: zi为逆变器交换信息向量,zi=[Vodi
对于含有m个逆变器的配网而言,逆变器网络的全局跟踪误差向量为
式中: Z=[
根据逆变器等效二阶模型式(9),全局开环系统模型为
式中: Im为m阶单位矩阵;v=[v1v2 … vm]T 为全局附加控制向量.
为消除逆变器间的电压误差,根据一致性理论,式(15)中附加反馈控制信号v设计为
式中: K为反馈增益矩阵;c 为耦合系数,用来控制逆变器附加控制信号与控制网络之间的耦合程度.
将式(17)和式(19)代入式(18)可得系统的闭环模型为
由式(20)可知,闭环系统的稳定性由矩阵 Ac=Im⊗A-c(L+G)⊗BK决定.令λr为(L+G)的第r个特征值,反馈增益矩阵K应使(A-λrBK)的所有特征值都具有负实部,则系统闭环模型Ac稳定.为了求解反馈增益矩阵K, 采用线性二次型最优控制方法.定义各逆变器的优化指标为
式中: Q、R为半正定实对称矩阵,矩阵Q决定逆变器电压状态与参考值之间的偏离程度,R决定控制成本;δi 为第i个逆变器的等效状态偏差,即δi=zi-z0;ui为根据式(15)计算出的逆变器电压参考值Vni的矢量形式;t为时间.
当 Ji越小时,表明逆变器的电压偏差越小,为使性能指标函数Ji最小化,K 计算如下:
式中:P为Riccati方程的正定解,即
图5
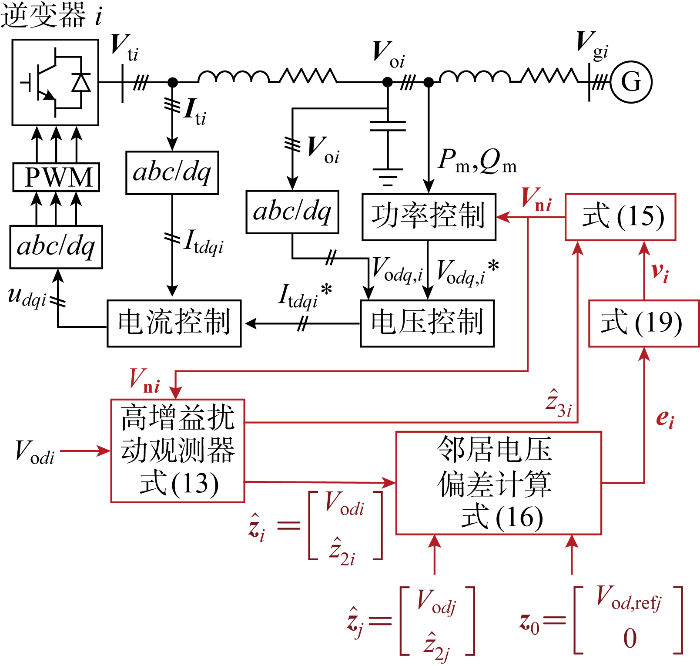
图5
分布式协同抗扰控制完整控制结构
Fig.5
Control block of distributed cooperative disturbance rejection control
2.3 通信拓扑选择
通信拓扑对分布式协同控制的动态性能影响较大,为使各逆变器能够快速收敛至额定值,应在成本限制的情况下选择动态性能最佳的通信拓扑.设计3个评估指标:①通信线路长度;②节点介数指标 Bt,网络介数中心性可以衡量网络中各节点重要性[25],对于逆变器网络中的主导逆变器节点,其节点介数Bt越大,说明该主导逆变器对其他逆变器节点的影响越强;③第二小特征值指标λ2,由分布式控制理论可知,对于网络动力学系统,可根据邻接矩阵A的第二小特征值λ2评估协同控制的收敛速度[26].λ2 越大意味着网络动力系统的收敛速度越快.例如由4个逆变器组成的网络系统,若逆变器1号为主导逆变器,对比通信线路总长度、 Bt和λ2, 通信拓扑方案如图6所示,分析结果如表1所示.
图6
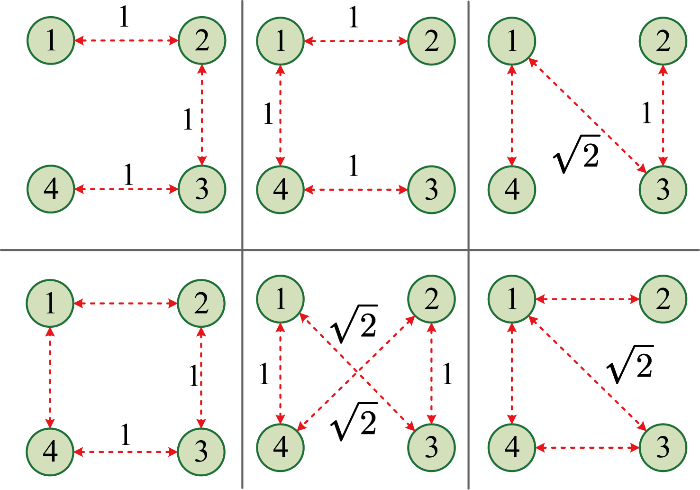
表1 拓扑性能评估
Tab.1
| 方案 | 通信线路长度 | Bt | λ2 |
|---|---|---|---|
| A | 3.000 | 1.0 | 0.5857 |
| B | 3.000 | 2.0 | 0.5857 |
| C | 3.414 | 2.0 | 1.0000 |
| D | 4.000 | 0.5 | 2.0000 |
| E | 4.828 | 0.5 | 2.0000 |
| F | 4.414 | 2.0 | 1.0000 |
2.4 主导逆变器选择
分布式协同抗扰控制中需要一个主导逆变器接受调度中心的参考值控制指令,理论上任何逆变器都可以作为主导逆变器,考虑到实际的配电网结构和通信拓扑结构,应优先选择容量较大或者具有较大节点介数Bt的逆变器作为主导逆变器.
3 仿真测试
3.1 测试系统介绍
图7
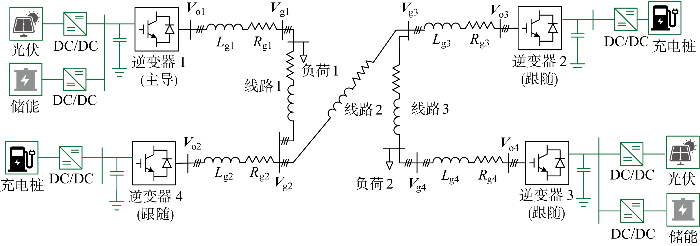
表2 测试系统参数
Tab.2
| 参数种类 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|
| 逆变器参数 | 额定容量/(MV·A) | 1 | 交流额定电压/kV | 10 |
| 直流额定电压/kV | 30 | Rdc/Ω | 2 | |
| Ldc/mH | 0.1273 | Cdc/μF | 750 | |
| Rf/Ω | 0.1 | Lf/mH | 1 | |
| Cf/μF | 50 | Rg/Ω | 0.1 | |
| Lg/mH | 0.5 | 0.01 | ||
| 0.01 | ωc/(rad·s-1) | 10 | ||
| 1 | 20 | |||
| 1 | 1000 | |||
| 线路参数 | 线路电阻/(Ω·km-1) | 0.5 | 线路电感/(mH·km-1) | 100 |
| 负荷参数 | Pload1/kW | 200 | Qload1/kvar | 100 |
| Pload2/kW | 300 | Qload2/kvar | 200 | |
| Pload3/kW | 150 | Qload3/kvar | 100 |
3.2 不同通信拓扑下的电压跟踪能力测试
图8
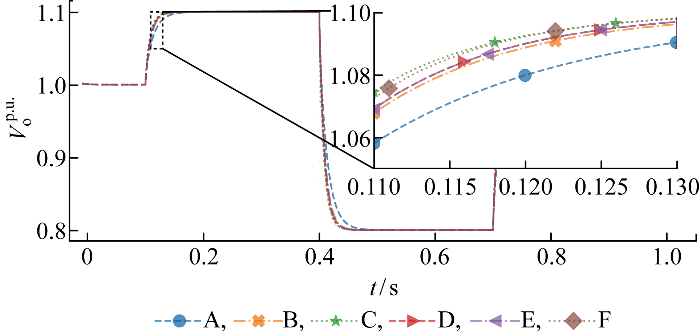
图8
不同通信拓扑下分布式协同抗扰控制的电压跟踪能力
Fig.8
Voltage tracking performance of distributed cooperative disturbance rejection control with different communication topologies
3.3 模型参数存在误差时的电压跟踪能力测试
图9
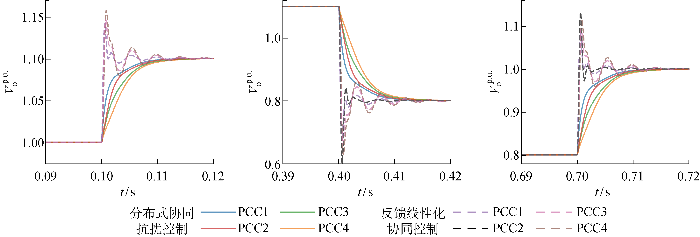
图9
不同控制器下各逆变器电压跟踪能力测试
Fig.9
Voltage tracking performance of different control strategies
图10
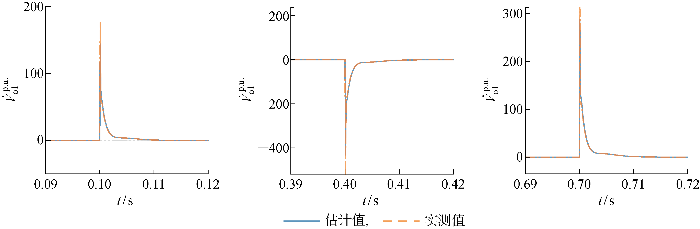
图10
电压跟踪过程中主导逆变器并网点电压一阶导数估计结果
Fig.10
Estimation results of first derivative of PCC voltage of dominant inverter by distributed cooperative disturbance rejection control in voltage tracking process
图11
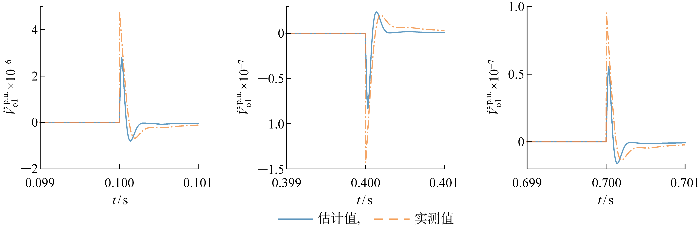
图11
电压跟踪过程中主导逆变器并网点电压二阶导数估计结果
Fig.11
Estimation results of second derivative of PCC voltage of dominant inverter by distributed cooperative disturbance rejection control in voltage tracking process
3.4 模型参数存在误差时的故障响应特性
图12
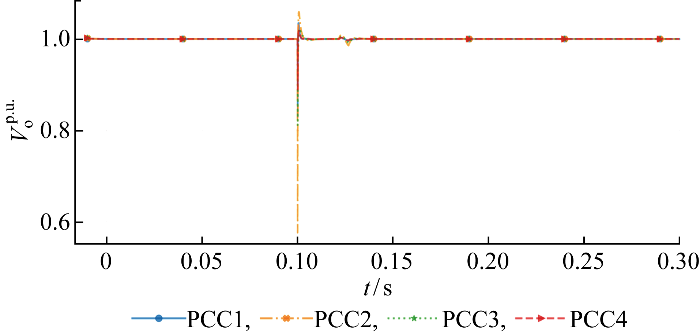
图12
分布式协同抗扰控制器的电压稳定控制能力测试
Fig.12
Voltage stability control performance of distrib~uted cooperative disturbance rejection control
图13
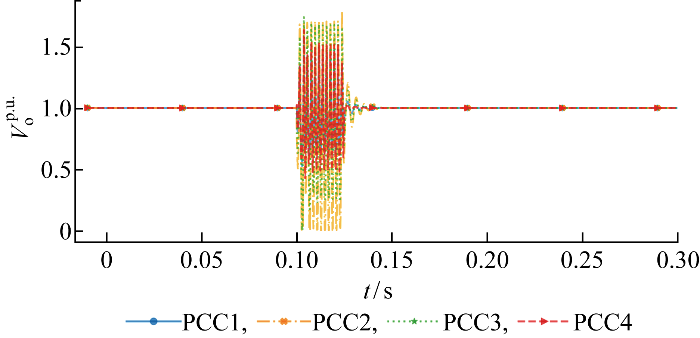
图13
反馈线性化协同控制器的电压稳定控制能力测试
Fig.13
Voltage stability control performance of distributed feedback linearization control
图14
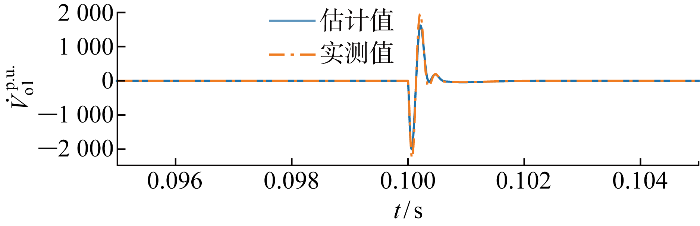
图14
电网短路故障状态下主导逆变器并网点电压一阶导数估计结果
Fig.14
Estimation results of first derivative of PCC voltage of dominant inverter by distributed cooperative disturbance rejection control under grid fault condition
图15
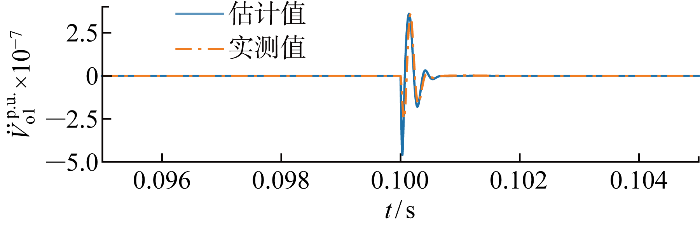
图15
电网短路故障状态下主导逆变器并网点电压二阶导数估计结果
Fig.15
Estimation results of second derivative of PCC voltage of dominant inverter by distributed cooperative disturbance rejection control under grid fault condition
3.5 通信系统存在时滞时的电压协同跟踪性能
为测试通信时滞对控制器性能,令逆变器之间的信号传输存在500 ms延迟,电压控制指令与3.3节保持一致,仿真结果如图16所示.由图中实线可见,通信时滞对分布式抗扰协同控制器的电压跟踪性能影响较小,各逆变器能够迅速收敛至目标电压水平,并且没有电压超调现象.然而,通信时滞对反馈线性化协同控制器影响较大,如图中虚线所示,电压跟踪过程中的超调量较大,不利于系统稳定性.
图16
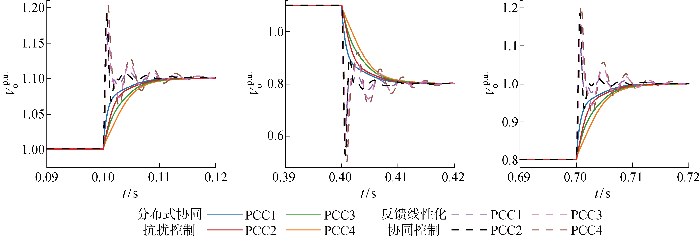
图16
通信时滞下不同控制策略的电压跟踪能力测试
Fig.16
Voltage tracking performance of different control strategies under communication delay
4 结论
含有高比例逆变器电源的配电网中存在多种扰动复杂,包括逆变器模型不确定性、参数误差以及电网短路故障等扰动,给配电网的电压稳定控制带来巨大挑战.本文提出一种配电网的分布式协同抗扰控制策略,具体结论如下:
(1) 逆变器的高维复杂非线性模型可等效为二阶输入-输出等效模型,所设计的高增益扩展状态观测器能够准确估计等效模型中的集总扰动,从而在控制环路中精准补偿系统多种扰动,有效提升了逆变器的抗扰能力.
(2) 根据一致性协同控制理论设计了多逆变器的分布式协同抗扰控制策略,每个逆变器仅需要本地的量测信号、观测器估计结果以及邻居逆变器的量测热和估计结果,即可实现全网电压协同抗扰控制.
(3) 基于图论和网络控制理论提出的通信拓扑优选方法,能够有效筛选出兼顾建造成本和分布式协同控制器收敛速度的最佳拓扑.
通过算例测试发现,所提控制策略在参数误差下能够实现多逆变器的电压协同跟踪调控以及扰动抑制,具有一定的工程实用价值.本文虽然在仿真部分测试了通信时滞对所提控制策略动态性能的影响,但是未在理论部分进行严格理论分析.未来将进一步从机理角度研究通信时滞对多逆变器分布式协同控制系统稳定性的影响,并在控制器设计中增加时滞补偿环节.
参考文献
双高电力系统频率安全问题评述及其应对措施
[J].
Review and countermeasures on frequency security issues of power systems with high shares of renewables and power electronics
[J].
新型电力系统安全稳定运行分析
[J].
Analysis of safe and stable operation of new power system
[J].
考虑地震攻击交通网影响的配电网韧性评估及提升策略
[J].
DOI:10.16183/j.cnki.jsjtu.2022.152
[本文引用: 1]

严重的地震灾害不仅会造成配电网大面积停电,还会损坏交通网,阻碍配电网恢复资源的运输,进而减缓配电网恢复.考虑地震攻击交通网的影响,提出地震灾害下配电网的韧性评估方法及韧性提升策略.首先,基于地震动峰值加速度建立反映地震灾害与交通-配电网故障概率关系的地震攻击模型,量化地震灾害对交通-配电网的影响,并生成交通-配电网故障场景.其次,引入配电网抢修队等待道路修复疏通时间,提出配电网韧性评估指标.再次,构建考虑故障线路抢修、道路修复疏通以及应急资源调度的配电网恢复双层优化模型并求解,上层优化模型以最小失电负荷量为目标,下层优化模型以最短配电网抢修队等待道路修复疏通时间为目标.最后,采用12节点交通网与IEEE33节点配电网耦合算例,验证所提韧性指标的可行性以及恢复方法的有效性.结果表明:考虑地震攻击交通网影响的配电网韧性评估指标更准确,所提的恢复策略能有效提升地震灾害下配电网韧性.
Resilience evaluation and enhancement strategy of distribution network considering impact of seismic attack on transportation networks
[J].
基于优劣解距离算法的光储配电网自适应虚拟惯性控制策略
[J].
DOI:10.16183/j.cnki.jsjtu.2022.106
[本文引用: 1]
针对多光储单元共同运行时因指标不同存在的惯性功率分配问题,以自适应虚拟惯性控制作为提升电能质量水平的手段,提出一种多光储单元协同控制策略.根据蓄电池的充放电特性,对系统提供惯性大小进行调整.当系统内出现高频扰动时,首先选择超级电容来提供惯性支撑,容量不足时,蓄电池将配合起到惯性支撑作用.当系统内部出现低频扰动时,由蓄电池提供惯性功率支撑,引入优劣解距离算法,在进行协同控制时,选取换流器允许功率波动范围、储能装置允许功率波动范围等指标作为评价参考,实现多指标综合评价下多虚拟同步发电机(VSG)单元之间的协同配合.最后通过实验平台搭建含多VSG单元的交流系统,验证所提控制策略的有效性.
Adaptive virtual inertial control strategy of optical storage and distribution network based on TOPSIS algorithm
[J].
微电网典型特征及关键技术
[J].
Typical characteristics and key technologies of microgrid
[J].
Distributed cooperative secondary control of microgrids using feedback linearization
[J].
模型参考自适应PID控制下的孤岛微网电压控制
[J].
Voltage control of islanded microgrid under model reference adaptive PID control
[J].
基于线性自抗扰控制的微网逆变器时-频电压控制策略
[J].
Time-frequency voltage control strategy of microgrid inverter based on linear active disturbance rejection control
[J].
基于改进二阶线性自抗扰技术的微网逆变器电压控制
[J].
Voltage control of microgrid inverter based on improved second-order linear active disturbance rejection control
[J].
多智能体协同控制发展及电力方面应用综述
[J].
Overview of multi-agent collaborative control development and applications in power system
[J].
Adaptive third-order leader-following consensus of nonlinear multi-agent systems with perturbations
[J].
Distributed robust finite-time secondary voltage and frequency control of islanded microgrids
[J].
Distributed cooperative control and stability analysis of multiple DC electric springs in a DC microgrid
[J].
Unified distributed control for DC microgrid operating modes
[J].
Distributed cooperative control of DC microgrids
[J].
Distributed optimal control of energy storages in a DC microgrid with communication delay
[J].
基于多智能体技术的泛微网区域自治-协同控制技术研究
[J].
Research on regional autonomous cooperative control technology of the pan microgrid based on multi-agent technology
[J].
多智能体系统的交直流混合微网群一致性协同控制
[J].
Consensus cooperative control of AC/DC hybrid microgrids based on multi-agent system
[J].
基于改进多智能体深度确定性策略梯度的多微网负荷频率协同控制策略
[J].
Load frequency coordinated control strategy of multi-microgrid based on improved MA-DDPG
[J].
基于预定时间一致性的直流微电网分布式协同控制
[J].
DOI:10.16183/j.cnki.jsjtu.2022.050
[本文引用: 1]
为解决直流微电网中分布式电源的协同控制问题,提出了一种基于预定时间一致性的微电网控制方法.首先提出一种基于预定时间控制的电流控制方法,能够实现在预先设定的时间内各分布式电源按比例输出功率,同时可以调节各分布式电源出口电压,将其恢复至额定值附近.然后通过MATLAB/Simulink建立微电网仿真系统,在不同工况下验证了所提出控制策略的有效性.最后在仿真系统中建立有限时间控制策略,并与预定时间控制策略下系统电流的电能质量与系统收敛预估时间的保守性进行比较,说明与验证了所提出的控制策略的优点.
Distributed prescribed-time consensus based cooperative control for DC microgrids
[J].
Dynamic averaged and simplified models for MMC-based HVDC transmission systems
[J].
Modular multilevel converter models for electromagnetic transients
[J].
Distributed small-signal stability conditions for inverter-based unbalanced microgrids
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}