Earthquake risk in urban street network: An example from region 6 of Tehran, Iran
1
2014
... 洪水、地震等灾害发生后,受灾地区的电力、交通、通信等基础设施可能遭受严重破坏[1],进而迟滞救灾设备与物资,阻碍被困人员及时获取外界救助.无人机(Unmanned Aerial Vehicle,UAV)能够克服上述恶劣条件的不利影响,向受灾地区提供人员搜救、物资投放、紧急医疗和临时通信等支持[2].例如,在2008年的汶川地震及南方冰灾中,救援人员利用无人机航拍进行数据收集、传送和分析以获取灾情信息;在2015年尼泊尔8.1级强震后,无人机承担了物资运输和灾后电线架设等紧急救援及恢复任务[3-4].此外,无人机还能够在疫情防控等特殊状态下进行无接触配送和应急指挥等特种作业[5]. ...
Post-earthquake response by small UAV helicopters
1
2016
... 洪水、地震等灾害发生后,受灾地区的电力、交通、通信等基础设施可能遭受严重破坏[1],进而迟滞救灾设备与物资,阻碍被困人员及时获取外界救助.无人机(Unmanned Aerial Vehicle,UAV)能够克服上述恶劣条件的不利影响,向受灾地区提供人员搜救、物资投放、紧急医疗和临时通信等支持[2].例如,在2008年的汶川地震及南方冰灾中,救援人员利用无人机航拍进行数据收集、传送和分析以获取灾情信息;在2015年尼泊尔8.1级强震后,无人机承担了物资运输和灾后电线架设等紧急救援及恢复任务[3-4].此外,无人机还能够在疫情防控等特殊状态下进行无接触配送和应急指挥等特种作业[5]. ...
无人机在重大自然灾害中的应用与探讨
1
2011
... 洪水、地震等灾害发生后,受灾地区的电力、交通、通信等基础设施可能遭受严重破坏[1],进而迟滞救灾设备与物资,阻碍被困人员及时获取外界救助.无人机(Unmanned Aerial Vehicle,UAV)能够克服上述恶劣条件的不利影响,向受灾地区提供人员搜救、物资投放、紧急医疗和临时通信等支持[2].例如,在2008年的汶川地震及南方冰灾中,救援人员利用无人机航拍进行数据收集、传送和分析以获取灾情信息;在2015年尼泊尔8.1级强震后,无人机承担了物资运输和灾后电线架设等紧急救援及恢复任务[3-4].此外,无人机还能够在疫情防控等特殊状态下进行无接触配送和应急指挥等特种作业[5]. ...
Application and exploration of unmanned aerial vehicle in major natural disasters
1
2011
... 洪水、地震等灾害发生后,受灾地区的电力、交通、通信等基础设施可能遭受严重破坏[1],进而迟滞救灾设备与物资,阻碍被困人员及时获取外界救助.无人机(Unmanned Aerial Vehicle,UAV)能够克服上述恶劣条件的不利影响,向受灾地区提供人员搜救、物资投放、紧急医疗和临时通信等支持[2].例如,在2008年的汶川地震及南方冰灾中,救援人员利用无人机航拍进行数据收集、传送和分析以获取灾情信息;在2015年尼泊尔8.1级强震后,无人机承担了物资运输和灾后电线架设等紧急救援及恢复任务[3-4].此外,无人机还能够在疫情防控等特殊状态下进行无接触配送和应急指挥等特种作业[5]. ...
无人机在应对地震灾害方面的应用及发展
1
2016
... 洪水、地震等灾害发生后,受灾地区的电力、交通、通信等基础设施可能遭受严重破坏[1],进而迟滞救灾设备与物资,阻碍被困人员及时获取外界救助.无人机(Unmanned Aerial Vehicle,UAV)能够克服上述恶劣条件的不利影响,向受灾地区提供人员搜救、物资投放、紧急医疗和临时通信等支持[2].例如,在2008年的汶川地震及南方冰灾中,救援人员利用无人机航拍进行数据收集、传送和分析以获取灾情信息;在2015年尼泊尔8.1级强震后,无人机承担了物资运输和灾后电线架设等紧急救援及恢复任务[3-4].此外,无人机还能够在疫情防控等特殊状态下进行无接触配送和应急指挥等特种作业[5]. ...
Application and development of unmanned aerial vehicle in dealing with earthquake disasters
1
2016
... 洪水、地震等灾害发生后,受灾地区的电力、交通、通信等基础设施可能遭受严重破坏[1],进而迟滞救灾设备与物资,阻碍被困人员及时获取外界救助.无人机(Unmanned Aerial Vehicle,UAV)能够克服上述恶劣条件的不利影响,向受灾地区提供人员搜救、物资投放、紧急医疗和临时通信等支持[2].例如,在2008年的汶川地震及南方冰灾中,救援人员利用无人机航拍进行数据收集、传送和分析以获取灾情信息;在2015年尼泊尔8.1级强震后,无人机承担了物资运输和灾后电线架设等紧急救援及恢复任务[3-4].此外,无人机还能够在疫情防控等特殊状态下进行无接触配送和应急指挥等特种作业[5]. ...
A comprehensive review of the COVID-19 pandemic and the role of IoT, drones, AI, blockchain, and 5G in managing its impact
1
2020
... 洪水、地震等灾害发生后,受灾地区的电力、交通、通信等基础设施可能遭受严重破坏[1],进而迟滞救灾设备与物资,阻碍被困人员及时获取外界救助.无人机(Unmanned Aerial Vehicle,UAV)能够克服上述恶劣条件的不利影响,向受灾地区提供人员搜救、物资投放、紧急医疗和临时通信等支持[2].例如,在2008年的汶川地震及南方冰灾中,救援人员利用无人机航拍进行数据收集、传送和分析以获取灾情信息;在2015年尼泊尔8.1级强震后,无人机承担了物资运输和灾后电线架设等紧急救援及恢复任务[3-4].此外,无人机还能够在疫情防控等特殊状态下进行无接触配送和应急指挥等特种作业[5]. ...
多无人机协同搜索区域分割与覆盖
1
2015
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
Decomposition and coverage of multi-UAV cooperative search area
1
2015
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
基于搜索意图交互的无人机集群协同搜索算法
1
2022
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
Cooperative search algorithm for UAV swarm based on search intention interaction
1
2022
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
Multi-UAV routing for area coverage and remote sensing with minimum time
1
2015
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
1
2003
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
无人机反应式扰动流体路径规划
1
2023
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
UAV reactive interfered fluid path planning
1
2023
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
多UAV协同搜索的博弈论模型及快速求解方法
1
2013
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
Game theory based multi-UAV cooperative searching model and fast solution approach
1
2013
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
基于改进分散搜索算法的无人机路径规划
1
2011
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
A revised scatter search algorithm for path planning of multiple UAVs
1
2011
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
A range-restricted recharging station coverage model for drone delivery service planning
1
2018
... 基于上述应用背景,国内外学者提出了多种无人机调度模型和算法.例如,为了提高无人机集群区域搜索效率,文献[6]中提出多无人机搜索区域分割方法,文献[7]中提出以覆盖率为引导的无人机集群协同搜索算法,文献[8]中提出使用配备图像传感器的无人机编队解决区域快速扫描问题;文献[9]中针对具有紧密耦合任务和刚性时窗的无人机集群配送任务分配问题提出了优化方法,而文献[10]中进一步提出一种基于深度强化学习的无人机反应式扰动流体路径规划架构,在实时性方面优于基于预测控制的路径规划方法;文献[11]中在分布式模型预测控制方法框架下,提出一种局部Nash最优的分布式搜索优化决策方法并设计了基于人工势场的协同机制,在此基础上建立多机协同的图论模型进行无人机路径优化;文献[12]中针对敌情信息不明环境中无人机查路径规划问题,基于Bayes方法计算出点到点之间的威胁概率,将无人机路径规划问题转化为车辆路由寻优模型,并将模拟退火嵌入到分散搜索算法来优化无人机的侦查路径;此外,文献[13]中在考虑无人机避障的情况下建立无人机的充电站选址模型,提升了无人机的可覆盖范围.上述工作为将无人机应用于人员搜索、灾后救援提供了良好的研究基础.然而,灾后大范围受影响地区存在广泛而分散的紧急物资配送需求,上述研究均未考虑无人机如何面对由此引发的超远距离覆盖要求. ...
The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery
1
2015
... 因此,为提高无人机的应用范围与适应能力,国内外学者进一步提出地面车辆(Ground Vehicle, GV)和无人机配合的两级混合运输模式,即GV-UAV联合系统.通过协同地面车辆与无人机,能够有效提高运输效率.目前,GV-UAV系统研究已取得一定进展.例如:文献[14]中提出一种旅行商问题变体(Flying Sidekick Traveling Salesman Problem, FSTSP)模型,地面车辆与无人机分别执行配送任务,并选择合适节点会合以节约配送时间;文献[15]中针对FSTSP模型的最差配送结果,分析对模型表现影响较大的若干因素,并证明GV-UAV模式相较于单纯的无人机配送模式可节约配送时间;基于FSTSP模型,文献[16]中进一步研究兼具无人机配送和拾取的GV-UAV系统调度问题;文献[17]中针对灾后救援场景提出将GV-UAV系统应用于灾后物资紧急配送,建立确定性需求和随机性需求下的调度模型.整体而言,当前研究通常围绕如何在传统车辆路径规划问题(Vehicle Routing Problem, VRP)基础上协调地面车辆与无人机的联合调度和开发加速求解方法等方面展开,但上述文献均未考虑地面车辆与无人机在灾后场景中可能出现的长时间运行需求[18],因此该模式虽然极大地扩展了无人机的覆盖范围,但是未能为设备提供便利可靠的能源补充措施,一定程度上限制了其灾后持续救援能力. ...
The vehicle routing problem with drones: Several worst-case results
1
2017
... 因此,为提高无人机的应用范围与适应能力,国内外学者进一步提出地面车辆(Ground Vehicle, GV)和无人机配合的两级混合运输模式,即GV-UAV联合系统.通过协同地面车辆与无人机,能够有效提高运输效率.目前,GV-UAV系统研究已取得一定进展.例如:文献[14]中提出一种旅行商问题变体(Flying Sidekick Traveling Salesman Problem, FSTSP)模型,地面车辆与无人机分别执行配送任务,并选择合适节点会合以节约配送时间;文献[15]中针对FSTSP模型的最差配送结果,分析对模型表现影响较大的若干因素,并证明GV-UAV模式相较于单纯的无人机配送模式可节约配送时间;基于FSTSP模型,文献[16]中进一步研究兼具无人机配送和拾取的GV-UAV系统调度问题;文献[17]中针对灾后救援场景提出将GV-UAV系统应用于灾后物资紧急配送,建立确定性需求和随机性需求下的调度模型.整体而言,当前研究通常围绕如何在传统车辆路径规划问题(Vehicle Routing Problem, VRP)基础上协调地面车辆与无人机的联合调度和开发加速求解方法等方面展开,但上述文献均未考虑地面车辆与无人机在灾后场景中可能出现的长时间运行需求[18],因此该模式虽然极大地扩展了无人机的覆盖范围,但是未能为设备提供便利可靠的能源补充措施,一定程度上限制了其灾后持续救援能力. ...
Integrated scheduling of m-truck, m-drone, and m-depot constrained by time-window, drop-pickup, and m-visit using constraint programming
1
2018
... 因此,为提高无人机的应用范围与适应能力,国内外学者进一步提出地面车辆(Ground Vehicle, GV)和无人机配合的两级混合运输模式,即GV-UAV联合系统.通过协同地面车辆与无人机,能够有效提高运输效率.目前,GV-UAV系统研究已取得一定进展.例如:文献[14]中提出一种旅行商问题变体(Flying Sidekick Traveling Salesman Problem, FSTSP)模型,地面车辆与无人机分别执行配送任务,并选择合适节点会合以节约配送时间;文献[15]中针对FSTSP模型的最差配送结果,分析对模型表现影响较大的若干因素,并证明GV-UAV模式相较于单纯的无人机配送模式可节约配送时间;基于FSTSP模型,文献[16]中进一步研究兼具无人机配送和拾取的GV-UAV系统调度问题;文献[17]中针对灾后救援场景提出将GV-UAV系统应用于灾后物资紧急配送,建立确定性需求和随机性需求下的调度模型.整体而言,当前研究通常围绕如何在传统车辆路径规划问题(Vehicle Routing Problem, VRP)基础上协调地面车辆与无人机的联合调度和开发加速求解方法等方面展开,但上述文献均未考虑地面车辆与无人机在灾后场景中可能出现的长时间运行需求[18],因此该模式虽然极大地扩展了无人机的覆盖范围,但是未能为设备提供便利可靠的能源补充措施,一定程度上限制了其灾后持续救援能力. ...
1
... 因此,为提高无人机的应用范围与适应能力,国内外学者进一步提出地面车辆(Ground Vehicle, GV)和无人机配合的两级混合运输模式,即GV-UAV联合系统.通过协同地面车辆与无人机,能够有效提高运输效率.目前,GV-UAV系统研究已取得一定进展.例如:文献[14]中提出一种旅行商问题变体(Flying Sidekick Traveling Salesman Problem, FSTSP)模型,地面车辆与无人机分别执行配送任务,并选择合适节点会合以节约配送时间;文献[15]中针对FSTSP模型的最差配送结果,分析对模型表现影响较大的若干因素,并证明GV-UAV模式相较于单纯的无人机配送模式可节约配送时间;基于FSTSP模型,文献[16]中进一步研究兼具无人机配送和拾取的GV-UAV系统调度问题;文献[17]中针对灾后救援场景提出将GV-UAV系统应用于灾后物资紧急配送,建立确定性需求和随机性需求下的调度模型.整体而言,当前研究通常围绕如何在传统车辆路径规划问题(Vehicle Routing Problem, VRP)基础上协调地面车辆与无人机的联合调度和开发加速求解方法等方面展开,但上述文献均未考虑地面车辆与无人机在灾后场景中可能出现的长时间运行需求[18],因此该模式虽然极大地扩展了无人机的覆盖范围,但是未能为设备提供便利可靠的能源补充措施,一定程度上限制了其灾后持续救援能力. ...
An exact algorithm for the green vehicle routing problem
1
2017
... 因此,为提高无人机的应用范围与适应能力,国内外学者进一步提出地面车辆(Ground Vehicle, GV)和无人机配合的两级混合运输模式,即GV-UAV联合系统.通过协同地面车辆与无人机,能够有效提高运输效率.目前,GV-UAV系统研究已取得一定进展.例如:文献[14]中提出一种旅行商问题变体(Flying Sidekick Traveling Salesman Problem, FSTSP)模型,地面车辆与无人机分别执行配送任务,并选择合适节点会合以节约配送时间;文献[15]中针对FSTSP模型的最差配送结果,分析对模型表现影响较大的若干因素,并证明GV-UAV模式相较于单纯的无人机配送模式可节约配送时间;基于FSTSP模型,文献[16]中进一步研究兼具无人机配送和拾取的GV-UAV系统调度问题;文献[17]中针对灾后救援场景提出将GV-UAV系统应用于灾后物资紧急配送,建立确定性需求和随机性需求下的调度模型.整体而言,当前研究通常围绕如何在传统车辆路径规划问题(Vehicle Routing Problem, VRP)基础上协调地面车辆与无人机的联合调度和开发加速求解方法等方面展开,但上述文献均未考虑地面车辆与无人机在灾后场景中可能出现的长时间运行需求[18],因此该模式虽然极大地扩展了无人机的覆盖范围,但是未能为设备提供便利可靠的能源补充措施,一定程度上限制了其灾后持续救援能力. ...
电动汽车新型转子内置式永磁同步电动机转矩脉动与电磁振动抑制研究
1
2022
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Research on a novel interior permanent magnet machine with segmented rotor to mitigate torque ripple and electromagnetic vibration
1
2022
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
电动汽车用 V 型磁钢转子永磁电机的电磁振动噪声削弱方法研究
1
2019
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Research on electromagnetic vibration and noise reduction method of V type magnet rotor permanent magnet motor electric vehicles
1
2019
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
计及故障率影响含电动汽车的分布式电源选址定容双层协调规划
1
2021
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Double-layer coordinated planning for location and capacity of distributed power supply with electric vehicles considering failure rate
1
2021
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
考虑建站费用的电动汽车充电站选址问题研究
1
2014
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Flow-refueling models for locating alternative-fuel stations with consideration of construction cost
1
2014
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
台风灾害下基于V2G的城市配电网弹性提升策略
1
2022
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Vehicle-to-grid based resilience promotion strategy for urban distribution network under typhoon disaster
1
2022
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
含区间数的电力应急网络最优调度路径的确定
1
2015
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Determining of optimal scheduling path in power emergency support network represented by interval values
1
2015
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
含高渗透分布式电源配电网灵活性提升优化调度方法
1
2018
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Optimized dispatching method for flexibility improvement of distribution network with high-penetration distributed generation
1
2018
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Resilient disaster recovery logistics of distribution systems: Co-optimize service restoration with repair crew and mobile power source dispatch
1
2019
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
加油站资产的受灾特点与防灾建议
1
2011
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Features of disaster affection on service station assets and disaster prevention suggestions
1
2011
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
分布式电源辅助电网黑启动研究综述
1
2019
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Research overview of power grid black-start with the aid of distributed generation
1
2019
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
含高渗透率分布式电源的独立微网的稳定性研究综述
1
2019
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Review on stability of isolated microgrid with highly penetrated distributed generations
1
2019
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
利用储能系统实现可再生能源微电网灵活安全运行的研究综述
1
2020
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
A review on the utilization of energy storage system for the flexible and safe operation of renewable energy microgrids
1
2020
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
DC microgrids—Part I: A review of control strategies and stabilization techniques
1
2016
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
电动汽车应急救援站选址及资源配置
1
2017
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Location selection and resource allocation of emergency rescue station for electric vehicles
1
2017
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
计及故障重构的含分布式电源配电网可靠性评估
1
2013
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Reliability evaluation for distribution system with distributed generations considering reconfiguration
1
2013
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
计及微电网中可再生能源间歇性影响的配电网可靠性评估
1
2015
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Distribution system reliability evaluation considering influence of intermittent renewable energy sources for microgrid
1
2015
... 随着电动汽车(Electric Vehicle, EV)渗透率提高、性能指标提升[19-20]、配套设施完善[21-22],电动汽车在各类紧急救援中发挥着愈发重要的作用.目前已有研究报道在极端灾害过后,电动汽车可作为灾后应急电源为关键性负载供电或协助电网恢复以提升电网弹性等[23-24].若以电动汽车代替传统地面车辆构建新型EV-UAV联合救援系统,不仅将为无人机提供更为有力的电能保障,而且电动汽车能够利用各类分布式电源(Distributed Generation, DG)和储能等新型能量主体,在紧急状态下及时获得多元化的关键性电能补充[25-26].实际情况下,GV-UAV模式依赖储油式加油站,应对自然灾害影响的抗干扰能力较弱[27].例如油气燃料在紧急状态下容易出现转运困难或储量不足等状况,进而限制GV-UAV系统在某些特定场景下的使用.相比之下,分布式电源和储能在紧急状态下具有更好的韧性和弹性,其具有模块化以及分散分布的特点,并且可以进入孤岛运行的模式独立供电[28],对自然灾害具有较强的抵抗能力;且其可利用太阳能、风能等多种可再生能源供电[29],因此即使在偏远地区也能够提供相对可靠的持续性电力供给[30⇓-32],有助于EV-UAV系统克服能源补给困难[33-34],提高综合续航水平和适应能力,进而在紧急救援中更为稳定、高效地发挥作用. ...
Joint routing and charging problem of multiple electric vehicles: A fast optimization algorithm
1
2022
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
台风灾害下基于V2G的城市配电网弹性提升策略
1
2022
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
Vehicle-to-grid based resilience promotion strategy for urban distribution network under typhoon disaster
1
2022
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
Mobile battery storage modeling and normal-emergency operation in coupled distribution-transportation networks
1
2022
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
高压输电线路多无人机自主协同巡线设计与测试
1
2017
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
Design and testing on autonomous multi-UAV cooperation for high-voltage transmission line inspection
1
2017
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
无人机线路自主巡检的动态轨迹规划方法
1
2022
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
Drone autonomous inspection method for transmission line based on dynamic trajectory planning
1
2022
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
基于无人机航拍的绝缘子掉串实时检测研究
1
2022
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
Real-time detection of insulator drop string based on UAV aerial photography
1
2022
... 另外,未发生自然灾害时EV-UAV系统中的设备也可用于物流运输及日常检修等,以提高设备利用率、创造经济效益,减小维持此救援系统带来的经济压力.例如,可将电动汽车应用于城市物流运输,电动汽车零排放、低噪声等优点使其可以大幅降低传统物流带来的环境污染和碳排放,助力能源转换和碳中和背景下的绿色物流建设;除自然灾害外,设备元件老化及人为因素等也可导致电网故障,此时,电动汽车可发挥其储能特性,作为应急移动电源通过其车网互动功能协助电网恢复[35⇓-37];EV-UAV系统可作为巡线系统对高压输电杆塔和导线进行常态化巡检[38⇓-40],并且专用电动汽车作为移动电源具备给无人机快速充电的功能,预期可提高巡线工作的灵活性和适应性.因此,在未发生自然灾害时,EV-UAV系统仍可发挥设备优势,并具备多元化的应用价值. ...
基于无人机应急通信的配电网灾后信息物理协同恢复策略
1
2023
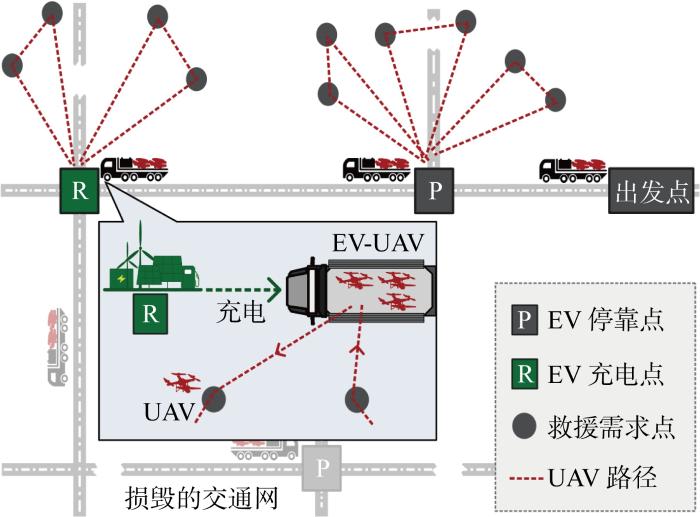
... 协调调度模型研究考虑电动汽车电能补充的EV-UAV两级路径规划问题,可表述为搭载多台无人机的电动汽车集群从同一仓库出发,依照最小成本路径,在指定时窗内使用无人机遍历所有二级节点即救援需求点,完成任务后返回仓库.为便于分析与说明,做出如下假设和简化:为了简化分析,同时考虑到发生紧急状况后待救援点信息可以通过遥感等技术手段获得[41-42],假设各一级节点、二级节点的地理位置和二级节点所分配救援需求时窗已知,且节点之间的路径与行驶时间已知;无人机换电、检修等操作在电动汽车行车期间内完成,并忽略无人机耗电对电动汽车储能的影响;各电动汽车和无人机参数相同,且每辆电动汽车搭载无人机数量相同;无人机抵达需求点即完成救援任务,而不细化考虑具体救援内容. ...
Cooperative cyber-physical distribution system restoration with UAV-based emergency communication UAV after disasters
1
2023
... 协调调度模型研究考虑电动汽车电能补充的EV-UAV两级路径规划问题,可表述为搭载多台无人机的电动汽车集群从同一仓库出发,依照最小成本路径,在指定时窗内使用无人机遍历所有二级节点即救援需求点,完成任务后返回仓库.为便于分析与说明,做出如下假设和简化:为了简化分析,同时考虑到发生紧急状况后待救援点信息可以通过遥感等技术手段获得[41-42],假设各一级节点、二级节点的地理位置和二级节点所分配救援需求时窗已知,且节点之间的路径与行驶时间已知;无人机换电、检修等操作在电动汽车行车期间内完成,并忽略无人机耗电对电动汽车储能的影响;各电动汽车和无人机参数相同,且每辆电动汽车搭载无人机数量相同;无人机抵达需求点即完成救援任务,而不细化考虑具体救援内容. ...
无人机航空遥感系统在灾害应急救援中的应用
1
2011
... 协调调度模型研究考虑电动汽车电能补充的EV-UAV两级路径规划问题,可表述为搭载多台无人机的电动汽车集群从同一仓库出发,依照最小成本路径,在指定时窗内使用无人机遍历所有二级节点即救援需求点,完成任务后返回仓库.为便于分析与说明,做出如下假设和简化:为了简化分析,同时考虑到发生紧急状况后待救援点信息可以通过遥感等技术手段获得[41-42],假设各一级节点、二级节点的地理位置和二级节点所分配救援需求时窗已知,且节点之间的路径与行驶时间已知;无人机换电、检修等操作在电动汽车行车期间内完成,并忽略无人机耗电对电动汽车储能的影响;各电动汽车和无人机参数相同,且每辆电动汽车搭载无人机数量相同;无人机抵达需求点即完成救援任务,而不细化考虑具体救援内容. ...
Application of UAV aerial remote sensing system in disaster emergency rescue
1
2011
... 协调调度模型研究考虑电动汽车电能补充的EV-UAV两级路径规划问题,可表述为搭载多台无人机的电动汽车集群从同一仓库出发,依照最小成本路径,在指定时窗内使用无人机遍历所有二级节点即救援需求点,完成任务后返回仓库.为便于分析与说明,做出如下假设和简化:为了简化分析,同时考虑到发生紧急状况后待救援点信息可以通过遥感等技术手段获得[41-42],假设各一级节点、二级节点的地理位置和二级节点所分配救援需求时窗已知,且节点之间的路径与行驶时间已知;无人机换电、检修等操作在电动汽车行车期间内完成,并忽略无人机耗电对电动汽车储能的影响;各电动汽车和无人机参数相同,且每辆电动汽车搭载无人机数量相同;无人机抵达需求点即完成救援任务,而不细化考虑具体救援内容. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}