自由空间光学(FSO)系统通过在大气中传输激光束建立点对点的通信联系,可以提供高安全性和不受管制的带宽,支持1~2 km范围内的高数据速率应用.然而,光信号受到指向误差的影响,造成接收端处信号光光束中心偏离接收天线中心位置,使接收信号光强衰减.如果空间激光链路束散角小,即使指向误差很小,也会严重影响链路性能,甚至导致通信失败[1 ] .
在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型.
然而,在目前指向误差的相关研究中,常用瑞利分布、莱斯分布、贝克曼分布等单一分布模型描述受扰动影响的指向误差,并未将跟踪噪声这一因素考虑在内.因此,从多种指向误差源的角度出发,在以往单一分布模型的基础上提出指向误差混合模型,并通过多个飞行器的指向误差实验验证了混合模型的可靠性.
1 指向误差分析
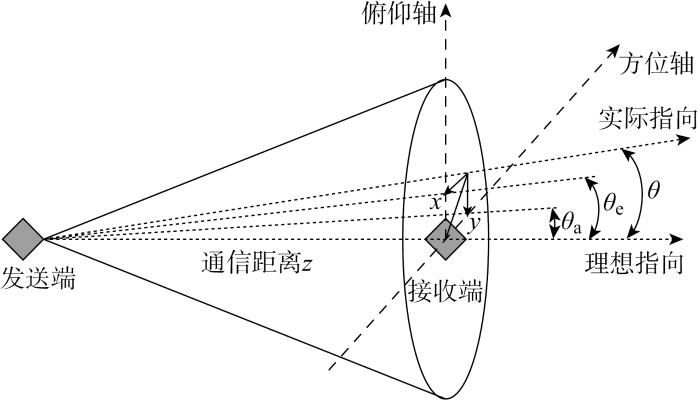
在空间光通信过程中,信号光经过远距离传输到达接收端时,由于指向误差受动态随机误差和静态偏置误差的影响在接收端产生一定的径向偏移,造成接收信号光强衰减.指向误差示意图如图1 所示.这种由指向误差产生的光束径向偏移现象可根据其统计分布来描述.
图1
图1
指向误差示意图
Fig.1
Diagram of pointing error
由于方位指向误差角(θ a )和俯仰指向角(θ e )都很小,所以有如下近似:
(1) ${{\theta }_{a}}\approx tan{{\theta }_{a}}=y/z,{{\theta }_{e}}\approx tan{{\theta }_{e}}=x/z$
式中:x 、y 分别为信号光在接收端视域中俯仰和方位轴的偏移量. 故径向指向误差(θ )满足下式,即
(2) θ = t a n θ = x 2 + y 2 / z
(3) θ = θ a 2 + θ e 2
(4) f ( θ i ) = 1 2 π σ i e x p - ( θ i - μ i ) 2 2 σ i 2
式中:i 为a(方位)或e(俯仰);θi 为指向误差在方位或俯仰方向的误差角;μi 为方位角或俯仰角的均值;σi 为方位角或俯仰角的标准差.
当θa ~N (μa , σ a 2 ) ,θe ~N (μe , σ e 2 ) 时,指向误差角的概率密度分布为贝克曼分布[7 ] ,即
(5) f (θ) = θ 2 π σ a σ e × ∫ 0 2 π e x p - ( θ c o s ϕ - μ a ) 2 2 σ a 2 - ( θ s i n ϕ - μ e ) 2 2 σ e 2 d ϕ
式中:ϕ 为0~360°任意角度. 当μ a =μ e =0,σ a 2 σ e 2 σ 2 ,此时指向误差角的概率密度分布为瑞利分布[2 ⇓ -4 ] ,即
(6) f (θ) = θ σ 2 e x p - θ 2 2 σ 2
当μ a =μ e =0,σ a 2 ≠ σ e 2 [5 ] ,即
(7) f (θ) = θ q σ e 2 e x p - θ 2 ( 1 + q 2 ) 4 q 2 σ e 2 I 0 θ 2 ( 1 - q 2 ) 4 q 2 σ e 2
式中:q =σa /σe ; I0 (·)为零阶第一类修正贝塞尔函数.
当μ a +μ e ≠0,σ a 2 = σ e 2 = σ 2 ,此时指向误差角的概率密度分布为莱斯分布[6 ] ,即
(8) f (θ) = θ σ 2 e x p - θ 2 + ξ 2 2 σ 2 I 0 θ ξ σ 2
式中:ξ 为莱斯分布的静态偏置误差,ξ 2 = μ a 2 + μ e 2 .
由于贝克曼分布和霍伊特分布涉及参数较多,计算复杂,暂不分析.主要分析当指向误差角满足瑞利分布、莱斯分布和高斯分布时的情况.
按指向误差的性质可将其分为动态随机误差和静态偏置误差.动态随机误差主要由飞行器平台扰动以及跟踪系统引起的噪声等.静态偏置误差的误差源主要为系统校准误差,比如热真空环境引起的视轴误差和器件误差等.一般情况下,这两种指向误差同时存在,对通信的性能有重大影响,不仅影响通信质量,也决定系统某些参数的设计[9 -10 ] .
在图2 所示诸多误差源中,跟踪系统中的噪声和平台内部的机械冲击是引起指向误差的主要因素.这些原因中的任何一个致使天线对不齐都可能导致链路故障或严重降低系统的性能.当平台内部扰动为引起指向误差的主要原因时,指向误差的概率密度呈瑞利分布;考虑系统校准误差造成静态偏置误差的存在,瑞利分布转为莱斯分布.当跟踪噪声为引起指向误差的主要原因时,指向误差服从高斯分布[8 ] .
图2
图2
飞行器天线指向误差影响因素
Fig.2
Influence factors of aircraft antenna pointing error
为了便于分析,大多数文献认为静态偏置误差可以忽略[11 ⇓ -13 ] ,即可用瑞利分布来描述指向误差.从图2 可以看出,用单一的分布模型来模拟指向误差无法考虑多种误差原因.本文从以上各种引起指向误差的原因出发,给出混合分布模型公式,与单一分布模型进行比较,找出最符合空间飞行器指向误差的混合分布模型,并分析混合权重的意义.
2 空间飞行器角微振动信号拟合
由于无法获取飞行器准确的角微振动频谱特性及实验数据,所以利用其角微振动功率谱密度(PSD)曲线,通过以下5个步骤,设计滤波器过滤高斯白噪声来产生飞行器角微振动的拟合信号,即指向误差拟合信号.
步骤1 读取角微振动功率谱密度.为了得到比较准确的空间飞行器角微振动频谱,国内外许多研究机构都在通信卫星上进行实验测试,总结出空间飞行器角微振动规律以及一些典型模型.其中,比较典型的是欧洲航天局(ESA)、国家空间发展局(NASDA)、宇宙航空研究开发机构(JAXA)和上海微型卫星工程中心进行的星上实测实验.
ESA对奥林巴斯通信卫星OLYMPUS角微振动功率谱密度曲线的测量结果[14 ] 显示:OLYMPUS的角微振动幅值从f 0 =1 Hz开始大幅衰减,对通信链路影响较大的角微振动主要集中在100 Hz以内,总的指向误差均方根(RMS)为16.3 μrad.
NASDA对工程测试卫星ETS-VI角微振动功率谱密度曲线的测量结果[15 ] 显示:ETS-VI的角微振动幅值从f 0 =10 Hz开始大幅衰减,对通信链路影响较大的角微振动主要集中在500 Hz以内,在0.39~250 Hz范围内,总的指向误差RMS为48.9 μrad.
JAXA对光学轨道间通信工程试验卫星(OICETS)角微振动功率谱密度曲线的测量结果[13 ] 显示:OICETS的角微振动幅值在1~1 024 Hz频段一直大幅衰减,对通信链路影响较大的角微振动主要集中在10 Hz以内.在最坏的情况下,OICETS在1~1 024 Hz频段的角扰动RMS在旋转周期中约为43.8 μrad.
上海微型卫星工程中心对量子科学实验卫星MICIUS角微振动功率谱密度曲线的测量结果[16 ] 显示:MICIUS随着频率的增加,能量呈下降趋势,大部分能量集中在低频带.在1~500 Hz角微振动引起的指向误差为9.3 μrad,不大于10 Hz的低频范围内频率分量占78.6%.
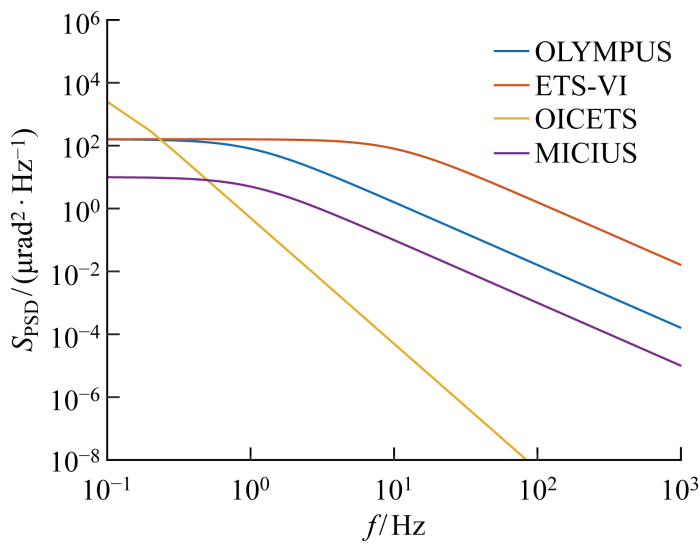
步骤2 确定截止频率.采用函数S (f )作为飞行器角微振动功率谱密度的拟合函数[14 ] ,根据步骤1中角微振动功率谱密度曲线的规律给出飞行器拟合函数参数的取值和振动特性,具体结果如表1 所示.S (f )可表示为
(9) S (f) = β 1 + ( f / f 0 ) α
式中:f 为频率;f 0 为角微振动衰减的起始频率,即为滤波器通带的截止频率;令α =2N ,N 为滤波器阶数;β 为起始角微振动功率谱密度值.
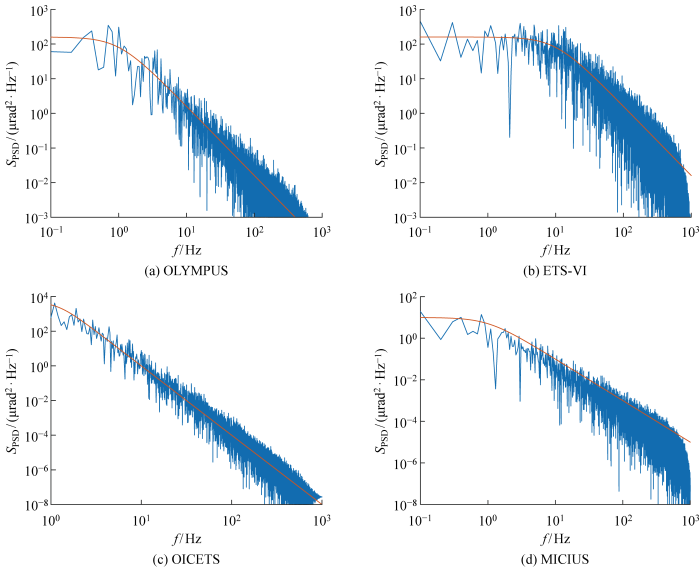
参考表1 的参数给出图3 中4个飞行器角微振动功率谱密度(S PSD )的拟合曲线.由于4个拟合曲线的角微振动总功率均大于实际测量的角微振动总功率,所以即使发生更大幅度的角微振动,以上4条拟合曲线仍可表示飞行器的实际角微振动情况.
图3
图3
飞行器角微振动功率谱密度拟合曲线
Fig.3
Fitting curves of angular micro-vibration power spectral density of aircraft
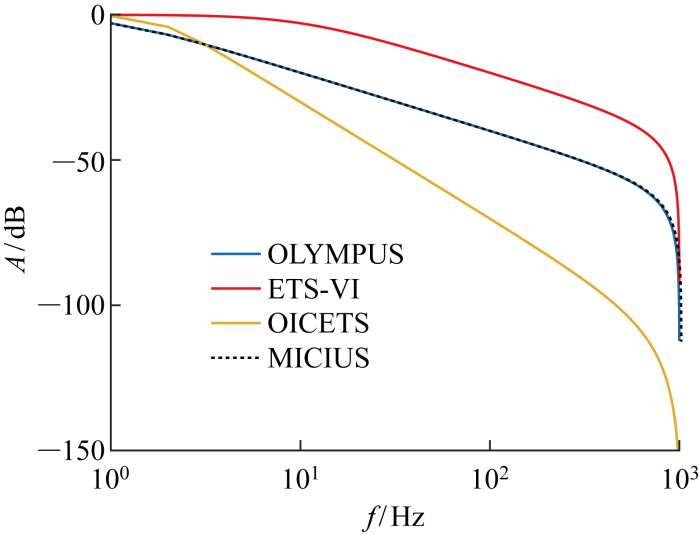
步骤3 设计巴特沃斯低通滤波器.由图3 可知,OLYMPUS、ETS-VI、OICETS和MICIUS的角微振动功率谱密度曲线接近于低通滤波器的幅频响应,而且整体趋势比较符合巴特沃斯低通滤波器的幅频响应特性,因此选用巴特沃斯滤波器.根据表1 ,可以设计符合OLYMPUS、ETS-VI、OICETS和MICIUS角微振动特性的巴特沃斯滤波器.滤波器参数通带截止频率f p 、通带波纹α p 和阻带衰减α s 如表2 所示.幅频响应曲线如图4 所示,图中A 为衰减幅度.图4 滤波器的幅频响应曲线和图3 所示的S (f )函数曲线特性基本一致.
图4
图4
巴特沃斯低通滤波器幅频响应
Fig.4
Amplitude-frequency response diagram of designed Butter-worth filter
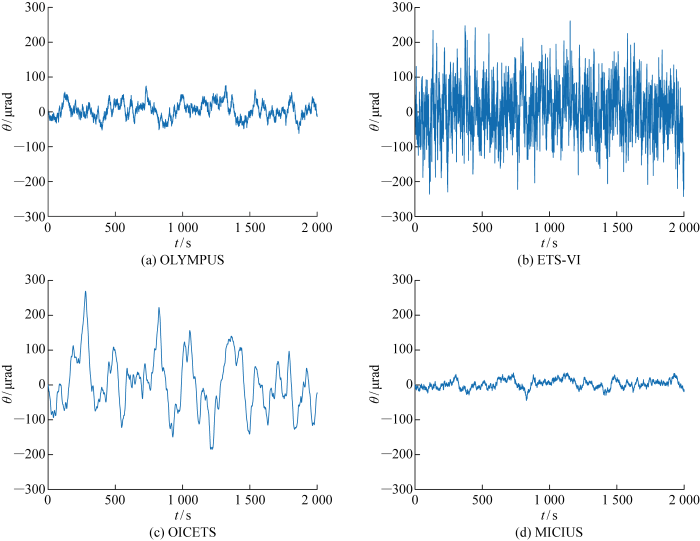
步骤4 滤出角微振动随机数并求其概率密度曲线.利用设计的滤波器对高斯白噪声进行滤波,然后在滤波器模块后加入增益模块,调整增益,改变角微振动拟合信号的幅值并得到角微振动的时域信号[17 -18 ] ,即为指向误差时域信号,如图5 所示.图5 反映出4个飞行器的角微振动信号分别在100、200、300和20 μrad以下.对调整后的时域信号进行傅里叶变换求功率谱密度,功率谱密度曲线如图6 所示.
图5
图5
4个飞行器的角微振动信号时域
Fig.5
Time domain diagram of simulated angular micro-vibration signal of four aircrafts
图6
图6
4个飞行器的角微振动信号功率谱密度
Fig.6
Simulated angular micro-vibration PSD of four aircrafts
由图6 可见,OLYMPUS的大幅值角微振动主要集中在1 Hz以内,频率大于1 Hz以后,幅度很快减小;ETS-VI的大幅值角微振动主要集中在10 Hz以内,频率大于1 Hz以后,幅度很快减小;OICETS角微振动在1~1 024 Hz频率范围时,大幅值振动主要集中在10 Hz以内,而且衰减速度高于其他3个飞行器;MICIUS角微振动虽与OLYMPUS在趋势上相似,但小于1 Hz的低频角微振动幅度更小,在1~10 Hz内衰减更快.这也符合文献[13 ⇓ ⇓ -16 ]中给出的结论.
因此,4种巴特沃斯低通滤波器的设计均符合图3 所示的OLYMPUS、ETS-VI、OICETS和MICIUS角微振动功率谱密度曲线特性.
步骤5 计算RMS.对角微振动功率谱密度曲线求积分并开根号后可知角微振动信号幅度的RMS值.表3 给出已知的角微振动功率谱密度曲线和拟合的角微振动功率谱密度曲线的振幅RMS.比较4个飞行器的功率谱密度曲线和角微振动RMS值可知, 设计巴特沃斯低通滤波器对高斯白噪声滤波而获得角微振动信号的方法是正确的,可以直接用于指向误差的模型重建.
3 建立指向误差单一分布模型
分析带有机械冲击,如波导开关、太阳能阵列驱动机制、推进器点火的系统时,假设跟踪系统的信噪比较大,方位角和俯仰角在跟踪过程中独立且分布相同,因此径向指向误差角服从瑞利分布[8 ] ,其概率密度函数如式(6);当静态偏置误差考虑在内时,瑞利分布转化为莱斯分布,其概率密度函数如式(8);当跟踪噪声为主要误差源时,通常采用高斯模型,其概率密度函数如式(4).
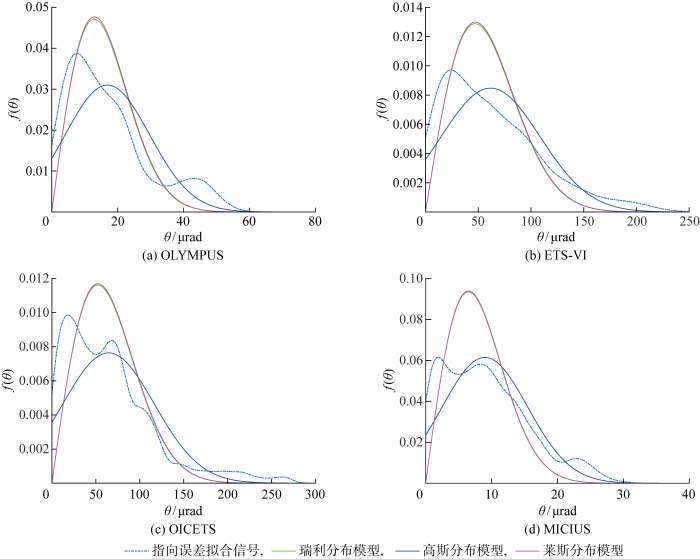
根据前述5个步骤,利用OLYMPUS、ETS-VI、OICETS和MICIUS飞行器的角微振动功率谱密度获得了角微振动信号的时域拟合信号,即指向误差拟合信号.对其进行统计分析可得到指向误差拟合信号的标准差σ 、均值μ ,如表4 所示.将表4 参数分别代入单一分布(高斯分布、瑞利分布、莱斯分布)的概率密度函数,即可得到指向误差的单一分布模型.图7 为单一分布模型与指向误差拟合信号的概率密度曲线对比图.图中静态偏置误差ξ 被认为是零均值的随机值[11 ⇓ -13 ] ,则莱斯分布退化为瑞利分布,二者曲线接近.
图7
图7
4个飞行器的3种指向误差模型概率密度曲线
Fig.7
PDF curves of three pointing error models of four aircrafts
4 建立指向误差混合分布模型
4.1 混合分布模型
为了进一步提高模型的准确度,参考王小英等[19 ] 、胡耀金等[20 ] 、Tekbıyık等[21 ] 提出的混合分布的一般形式:
(10) $\begin{matrix} & f({{x}_{j}};\varphi )=\overset{g}{\mathop{\underset{i=1}{\mathop \sum }\,}}\,{{w}_{i}}{{f}_{i}}({{x}_{j}};{{K}_{i}}), \\ & i=1,2,\ldots,g;j=1,2,\ldots,n \\ \end{matrix}$
式中:xj 为第j 个观测值;n 为样本总数;g 为混合分布的个数,即模型的阶;wi 和fi (xj ;Ki )分别为混合分布中第i 个分布的混合比例即权重和概率密度函数;Ki 为第i 个分布的概率密度函数参数集合;φ 为混合分布模型中所有未知参数组成的参数集合,即φ ={w 1 ,w 2 ,…,wg -1 ,K 1 ,K 2 ,…,Kg }. 本文提出高斯-高斯混合分布模型、高斯-瑞利混合分布模型、高斯-莱斯混合分布模型以及瑞利-莱斯混合分布模型.
(11) $\begin{matrix} & f({{\theta }_{j}};\varphi )=w{{f}_{G}}({{\theta }_{j}},{{K}_{1}})+(1-w){{f}_{R}}({{\theta }_{j}},{{K}_{2}})= \\ & w\frac{1}{\sqrt{2\pi }{{\sigma }_{1}}}\exp \left[ -\frac{{{(\theta -{{\mu }_{1}})}^{2}}}{2\sigma _{1}^{2}} \right]+ \\ & (1-w)\frac{\theta }{\sigma _{2}^{2}}\exp \left( -\frac{{{\theta }^{2}}+{{\xi }^{2}}}{2\sigma _{2}^{2}} \right){{I}_{0}}\left( \frac{\theta \xi }{\sigma _{2}^{2}} \right) \\ \end{matrix}$
式中:fG 、fR 分别为高斯和莱斯分布概率密度函数;w 为混合分布模型的混合权重;K 1 ={μ 1 ,σ 1 },K 2 ={σ 2 ,ξ },参数集合为φ ={w ,μ 1 ,σ 1 ,σ 2 ,ξ },μ 1 和σ 1 分别为高斯分布的均值和标准差,σ 2 为莱斯分布的标准差.
常用的参数估计有最小二乘估计、矩估计、极大似然估计.采用最小二乘估计法估计混合分布模型的参数[22 ] .
4.2 混合权重
在对指向误差进行预分配时,平台扰动与跟踪噪声带来的误差预算占有不同比例[23 ⇓ -25 ] .这在混合分布模型中表现为权重w 这一重要参数.混合分布模型的权重会因不同飞行器在执行不同空间探测或通信任务时发生改变,从而及时反映引起指向误差变化的误差源情况.利用参数估计得到4个飞行器指向误差的混合分布模型的权重占比,结果如表5 所示.
表5 结果反映出高斯分布占比高于瑞利和莱斯分布的特点,并符合实际情况.回顾图2 的指向误差影响因素,高斯分布代表的是跟踪噪声,莱斯分布代表的是有静态偏置误差的平台扰动.在跟踪系统的补偿下,平台扰动带来的影响得到一定程度的补偿,但跟踪噪声仍然存在,因此高斯分布占比较高.当模型完全忽略跟踪噪声时,静态偏置误差决定指向误差分布模型的比例.
混合权重这一重要参数使得指向误差混合分布模型不仅能够适应执行不同任务的通信系统,还可以根据不同需求来改变各个分布的占比.因此为飞行器性能分析提供了更加真实的指向误差信号数据,为新型号飞行器指向误差提供新的建模方法,也给预算分配提供了一定的参考价值.
4.3 静态偏置误差
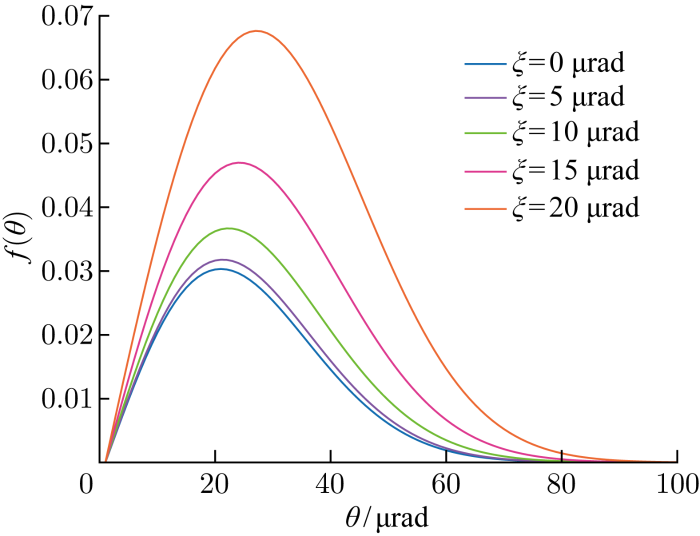
以上分析中,静态偏置误差是零均值的随机值,但在实际应用中,静态偏置误差是一定存在的非零值,它表现为器件误差、安装误差等.图8 为指向误差标准差σ =20 μrad时,不同静态偏置误差ξ 下指向误差θ 的概率密度分布图. 由图8 可见,ξ 的存在对θ 的概率密度分布影响很明显. 首先,ξ 的存在会改变θ 概率密度的峰值,即ξ 的存在会使θ 的峰值向较大的方向移动;其次,ξ 的存在会扩展θ 的概率密度分布,相对而言,不存在ξ 时θ 的分布较集中;整体而言,当ξ 越大时,这两种影响就越明显.
图8
图8
不同静态偏置误差下指向误差的概率密度分布
Fig.8
PDF curves of pointing error of different static bias errors
利用参数估计得到4个飞行器OLYMPUS、ETS-VI、OICETS、MICIUS指向误差的静态偏置误差,分别为3.18、12.22、17.11、1.85 μrad.
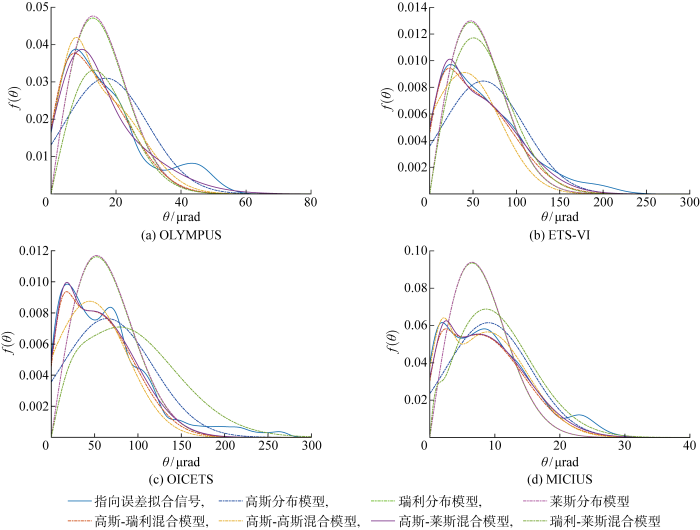
在加入静态偏置误差和混合权重后,7种分布模型的概率密度曲线如图9 所示.从图9 中可以直观地看出单一分布模型与指向误差拟合信号有较大误差,但混合分布模型比较接近指向误差拟合信号的概率密度曲线,其中高斯-莱斯和高斯-瑞利的混合模型最接近.为了评定各模型的优劣,给出评价指标并从中确定最优的混合分布模型.
图9
图9
4个飞行器的7种指向误差分布模型概率密度曲线
Fig.9
PDF curves of mixed distribution model based of four aircrafts
4.4 模型评价指标
确定系数(R 2 )根据数据的变化来表征一个拟合模型的好坏,取值范围为0~1,越接近1,表明拟合模型对原模型的解释能力越强.
预测数据(y ^ i ) 与实测数据均值(y - i ) 之差的回归平方和为
(12) ${{s}_{SSR}}=\overset{n}{\mathop{\underset{i}{\mathop \sum }\,}}\,{{({{\hat{y}}_{i}}-{{\bar{y}}_{i}})}^{2}}$
(13) ${{s}_{SST}}=\overset{n}{\mathop{\underset{i}{\mathop \sum }\,}}\,{{({{y}_{i}}-{{\bar{y}}_{i}})}^{2}}$
(14) ${{R}^{2}}=\frac{{{s}_{SSR}}}{{{s}_{SST}}}-1-\frac{{{s}_{SSE}}}{{{s}_{SST}}}$
由于瑞利-莱斯的混合分布模型仅仅考虑跟踪噪声和静态偏置误差,忽略机械冲击这一重要误差源,所以其拟合度最低.其他混合分布模型,在考虑机械冲击的前提下,又兼顾其他误差源,所以它们的拟合度均优于单一分布模型.
当考虑静态偏置误差为零均值的随机值时,高斯-莱斯混合分布模型退化为高斯-瑞利混合分布模型,但此时高斯-瑞利混合分布模型已经比单一的瑞利分布模型分别优化了26.22%、40.08%、47.09%、30.11%.把估计得到的静态偏置误差加入混合分布模型后,拟合度又分别提高1.22%、1.12%、0.55%、0.76%.
表6 的结果显示,高斯-莱斯的混合分布模型与4个飞行器的实测指向误差信号拟合度最高,说明该模型对OLYMPUS、ETS-VI、OICETS和 MICIUS 指向误差的解释能力高于常用单一分布模型,同时该模型也具有一般性,可适用于其他飞行器指向误差的建模上.因此,高斯-莱斯的混合分布模型最适合作为指向误差的数学模型.
5 不同模型下的误比特率仿真
为了量化不同模型间的差异,对简单通信链路下QPSK信号受指向误差影响发生的误比特率(BER)进行仿真[26 ] .图10 给出指向误差单一分布主要模型(高斯分布、瑞利分布、莱斯分布)和混合分布主要模型(高斯-瑞利混合分布模型、高斯-莱斯混合分布模型)下,系统发生的BER情况,一方面给出指向误差拟合信号影响下的系统BER量化值,另一方面对比单一分布模型和混合分布模型与指向误差拟合信号之间的差距.图中:r SNR 为信噪比.表7 给出5种指向误差模型与指向误差拟合信号之间的BER仿真偏差.
图10
图10
不同模型的指向误差对BER的影响
Fig.10
Impact of pointing error of different models on BER
受指向误差的影响,以上飞行器在通信过程中,信噪比为10 dB时,BER已接近30%,结果在图10 中显示.不同的指向误差分布模型在此基础上又带来不同程度的BER偏差,这无形中进一步增大指向误差的实际影响,故准确的指向误差分布模型十分必要.
由表7 的结果可见,基于混合分布模型的指向误差信号与指向误差拟合信号之间的BER偏差均小于单一分布模型.图10 的曲线和表7 的误比特率偏差都表明,混合分布模型中的高斯-莱斯混合分布模型最符合指向误差拟合信号的实际情况.以OLYMPUS平台为例,高斯-瑞利的混合分布模型比单一分布的瑞利模型拟合度优化26.22%;考虑静态偏置误差后,高斯-瑞利的混合分布模型转化为高斯-莱斯的混合分布模型,此时, 高斯-莱斯的混合分布模型又将拟合度提高1.22%.在拟合度共优化27.44%的情况下,BER偏差仅0.35 dB,降低 2.87 dB.其他3个飞行器也是高斯-莱斯的混合分布模型拟合度最高,BER偏差分别降低0.18、0.36和2.48 dB.这个结果也验证了上文的结论,即混合分布模型中,高斯-莱斯的混合分布模型是最优模型.
在空间通信中,微弧度量级的指向误差都会带来极大影响,因此在研究飞行器的指向误差时,应考虑静态偏差角.用单一的高斯、瑞利分布或者是不考虑静态偏差的混合分布模型既不能准确反映出引起指向误差的复杂原因,又加大了通信BER.
6 结语
本文根据ESA、NASDA、JAXA和上海微型卫星工程中心给出的OLYMPUS、ETS-VI、OICETS和MICIUS飞行器角微振动功率谱模型,用巴特沃斯滤波器滤波的方法获取空间飞行器的指向误差信号.对比指向误差的单一分布模型(高斯分布、瑞利分布和莱斯分布)和混合分布模型与实测指向误差信号的拟合度,确定混合分布模型中的高斯-莱斯混合分布模型最符合OLYMPUS、ETS-VI、OICETS和MICIUS的指向误差特性.以OLYMPUS平台为例,高斯-莱斯混合分布模型的拟合度比单一分布模型中的瑞利模型提高27.44%.又比较了不同指向误差分布模型下的误比特率和实际指向误差带来的BER之间的偏差,该偏差值再次验证高斯-莱斯混合分布模型的准确性.以OLYMPUS平台为例,高斯-莱斯混合分布模型的误比特率偏差仅 0.35 dB,比单一分布模型中的瑞利分布模型的误比特率偏差降低2.87 dB.这对准确评估飞行器的通信性起到重要作用.
单一分布模型只能给出指向误差的均方根值,无法综合考虑跟踪噪声、机械运动和静态偏差角等多种指向误差源.混合分布模型加入混合权重这一重要参数,可以很好地解释不同飞行器在执行任务时引起指向误差变化的误差源差异情况.除此之外,在设计师进行地面半仿真系统实验时,可以利用混合模型来模拟不同的空间探测任务所产生的指向误差,改变混合权重就可以实现不同误差源起主导作用的情形.对于在轨的飞行器,利用混合模型权重可以实时追踪飞行器的受干扰情况,及时作出应对,减小损失.
由于所采用的单一分布模型为简化的贝克曼分布,在后续研究中将利用贝克曼分布进行多分布混合建模,以求更加准确有效的指向误差混合模型.同时,在此模型的基础上,还将继续对指向误差的补偿方法深入研究.
参考文献
View Option
[1]
GHALI F FASSI B DRIZ S . Pointing error angle effect on the performance of 10 Gbps ultra-long satellite optical wireless communication
[C]// 2021 Palestinian International Conference on Information and Communication Technology Gaza, Palestine : IEEE , 2021 : 88 -91 .
[本文引用: 1]
[2]
FARID A A HRANILOVIC S . Outage capacity optimization for free-space optical links with pointing errors
[J]. Journal of Lightwave Technology 2007 , 25 (7 ): 1702 -1710 .
DOI:10.1109/JLT.2007.899174
URL
[本文引用: 3]
[3]
JURADO-NAVAS A GARRIDO-BALSELLS J M PARIS J F , et al Impact of pointing errors on the performance of generalized atmospheric optical channels
[J]. Optics Express 2012 , 20 (11 ): 12550 -12562 .
DOI:10.1364/OE.20.012550
URL
[本文引用: 2]
[4]
刘锡国 , 刘敏 , 毛忠阳 , 等 . 指向误差下高斯光束几何衰减模型分析
[J]. 电子学报 2021 , 49 (10 ): 1893 -1899 .
DOI:10.12263/DZXB.20210285
[本文引用: 2]
无线光通信系统中的指向误差对光功率的几何衰减产生影响,导致系统接收光功率的下降,影响系统性能.为了精确分析指向误差对无线光通信系统性能的影响,本文基于高斯光束光强分布推导了圆形孔径下无线光通信系统接收光功率几何衰减模型的精确解析解,仿真了不同参数条件下指向误差对系统几何衰减的影响,验证了解析解的准确性,并与现有模型进行了比较分析.结果表明,采用现有近似模型计算几何衰减存在的误差不能忽略,因此在圆形孔径下进行模型推导更符合实际情况.在无线光通信点对点通信及组网通信时,采用本文所得的指向误差下的高斯光束几何衰减解析模型更为精确.
LIU Xiguo LIU Min MAO Zhongyang , et al Analysis of geometric attenuation model of Gaussian beam under pointing error
[J]. Acta Electronica Sinica 2021 , 49 (10 ): 1893 -1899 .
DOI:10.12263/DZXB.20210285
[本文引用: 2]
Pointing error in wireless optical communication system has an impact on the geometric attenuation of the received optical power, resulting in a decrease in the received optical power of the system and affecting the performance of the system. In order to accurately analyze the effect of pointing error on the performance of wireless optical communication system, based on the intensity distribution of Gaussian beam, the accurate analytical solution of the geometric attenuation model of received optical power in wireless optical communication system with circular aperture is derived. The influence of pointing error on the geometric attenuation of the system under different parameters is simulated, and the accuracy of the analytical solution is verified and compared with the existing model. The results show that there are errors in using the existing approximate model to calculate the geometric attenuation, and the existing errors cannot be ignored, therefore the model derivation under the circular aperture is more in line with the actual situation. In the point-to-point communication and networking communication of wireless optical communication, it is more accurate to use the Gaussian beam geometric attenuation analytical model under pointing error.
[5]
GAPPMAIR W HRANILOVIC S LEITGEB E . OOK performance for terrestrial FSO links in turbulent atmosphere with pointing errors modeled by hoyt distributions
[J]. IEEE Communications Letters 2011 , 15 (8 ): 875 -877 .
DOI:10.1109/LCOMM.2011.062911.102083
URL
[本文引用: 2]
[6]
ALQUWAIEE H YANG H C ALOUINI M S . On the asymptotic capacity of dual-aperture FSO systems with generalized pointing error model
[J]. IEEE Transactions on Wireless Communications 2016 , 15 (9 ): 6502 -6512 .
DOI:10.1109/TWC.2016.2585486
URL
[本文引用: 3]
[7]
BOLUDA-RUIZ R GARCÍA-ZAMBRANA A CASTILLO-VÁZQUEZ B , et al On the effect of correlated sways on generalized misalignment fading for terrestrial FSO links
[J]. IEEE Photonics Journal 2017 , 9 (3 ): 1 -14 .
[本文引用: 3]
[8]
ARNON S KOPEIKA N S . Laser satellite communication network-vibration effect and possible solutions
[J]. Proceedings of the IEEE 1997 , 85 (10 ): 1646 -1661 .
DOI:10.1109/5.640772
URL
[本文引用: 3]
[9]
王进 . 空间光通信ATP跟瞄误差分析及控制 [D]. 成都 : 电子科技大学 , 2006 .
[本文引用: 1]
WANG Jin . Analysis and control of ATP tracking error in space optical communication [D]. Chengdu : University of Electronic Science and Technology of China , 2006 .
[本文引用: 1]
[10]
TRENT V GREENE M HUNG S . Precision pointing error analysis in a satellite optical communication optical system
[C]// [1990] Proceedings. The Twenty-Second Southeastern Symposium on System Theory Cookeville, USA : IEEE , 1990 : 190 -194 .
[本文引用: 2]
[11]
ARNON S . Minimization of outage probability of WiMAX link supported by laser link between a high-altitude platform and a satellite
[J]. Journal of the Optical Society of America A , Optics , Image Science , & Vision 2009 , 26 (7 ): 1545 -1552 .
[本文引用: 2]
[12]
POLISHUK A ARNON S . Optimization of a laser satellite communication system with an optical preamplifier
[J]. Journal of the Optical Society of America A , Optics , Image Science , & Vision 2004 , 21 (7 ): 1307 -1315 .
[本文引用: 2]
[13]
TOYOSHIMA M TAKAYAMA Y KUNIMORI H , et al In-orbit measurements of spacecraft microvibrations for satellite laser communication links
[J]. Optical Engineering 2010 , 49 (8 ): 083604.
[本文引用: 6]
[14]
WITTIG M E VAN HOLTZ L TUNBRIDGE D E L , et al In-orbit measurements of microaccelerations of ESA’s communication satellite Olympus
[C]// OE/LASE’90. Proc SPIE 1218 , Free-Space Laser Communication Technologies II Los Angeles, USA : SPIE , 1990 : 205 -214 .
[本文引用: 5]
[15]
TOYOSHIMA M ARAKI K . In-orbit measurements of short term attitude and vibrational environment on the Engineering Test Satellite VI using laser communication equipment
[J]. Optical Engineering 2001 , 40 (5 ): 827 -832 .
DOI:10.1117/1.1355976
URL
[本文引用: 4]
[16]
WANG X LI C K JIA J J , et al Angular micro-vibration of the Micius satellite measured by an optical sensor and the method for its suppression
[J]. Applied Optics 2021 , 60 (7 ): 1881 -1887 .
DOI:10.1364/AO.416811
URL
[本文引用: 3]
Satellite angular micro-vibration has an important impact on the efficiency of space quantum communication links. We measured the micro-vibrations on the Micius satellite in orbit using a high-precision optical sensor mounted on the satellite and analyzed the power spectral density. We designed a compound axis acquisition, tracking, and pointing (ATP) system based on a two-axis turntable and tested its suppressive effect on the micro-vibration through in-orbit experiments. The tracking error caused by the angular micro-vibration was found to be 9.3 µrad, with the energy concentrated primarily in the frequencies below 30 Hz; after suppression by the ATP system, the error was 0.47 µrad.
[17]
陈纯毅 , 杨华民 , 佟首峰 , 等 . 空间光通信卫星平台振动实时模拟
[J]. 系统仿真学报 2007 , 19 (16 ): 3834 -3837 .
[本文引用: 1]
CHEN Chunyi YANG Huamin TONG Shoufeng , et al Real-time simulation of satellite-platform vibration of space optical communication
[J]. Journal of System Simulation 2007 , 19 (16 ): 3834 -3837 .
[本文引用: 1]
[18]
罗文嘉 . 星间激光通信终端控制系统设计及其性能分析 [D]. 哈尔滨 : 哈尔滨工业大学 , 2016 .
[本文引用: 1]
LUO Wenjia . Design and performance analysis of the terminal control system for inter-satellite laser communication [D]. Harbin : Harbin Institute of Technology , 2016 .
[本文引用: 1]
[19]
王小英 , 陈常龙 , 尹俊平 . 正态分布和瑞利分布混合情形下的参数估计及分类问题
[J]. 数学建模及其应用 2016 , 5 (3 ): 25 -30 .
[本文引用: 1]
WANG Xiaoying CHEN Changlong YIN Junping . The parameter estimation and classification under mixture model of normal and Rayleigh distribution
[J]. Mathematical Modeling & Its Applications 2016 , 5 (3 ): 25 -30 .
[本文引用: 1]
[20]
胡耀金 , 卞鸿巍 , 王荣颖 , 等 . 基于高斯混合模型的光纤罗经误差概率分布建模
[J]. 系统工程与电子技术 2021 , 43 (6 ): 1644 -1650 .
DOI:10.12305/j.issn.1001-506X.2021.06.22
[本文引用: 1]
针对船用光纤罗经误差的概率分布不完全符合高斯分布的情况, 提出了一种基于高斯混合模型(Gaussian mixture model, GMM)的光纤罗经误差概率分布函数(probability distribution function, PDF)建模方法。该方法使用多个高斯分布的线性叠加来拟合光纤罗经误差的概率分布, 并结合一种鲁棒性的期望最大化(expectation maximization, EM)算法来估计GMM中的参数。仿真分析和实测数据验证, 相比于使用单一的高斯分布, 基于所提方法建立的光纤罗经误差概率分布更加符合该导航设备误差的实际概率分布。
HU Yaojin BIAN Hongwei WANG Rongying , et al Modeling of error probability distribution of fiber-optic gyrocompass based on Gaussian mixture model
[J]. Systems Engineering & Electronics 2021 , 43 (6 ): 1644 -1650 .
[本文引用: 1]
[21]
TEKBıYıK K EKTI A R KURT G K , et al Modeling and analysis of short distance sub-terahertz communication channel via mixture of gamma distribution
[J]. IEEE Transactions on Vehicular Technology 2021 , 70 (4 ): 2945 -2954 .
DOI:10.1109/TVT.2021.3063209
URL
[本文引用: 1]
[22]
王福昌 , 曹慧荣 , 朱红霞 . 经典最小二乘与全最小二乘法及其参数估计
[J]. 统计与决策 2009 (1 ): 16 -17 .
[本文引用: 1]
WANG Fuchang CAO Huirong ZHU Hongxia . Classical least squares and total least squares and their parameter estimation
[J]. Statistics & Decision 2009 (1 ): 16 -17 .
[本文引用: 1]
[23]
LI X LIU Y F WANG J F , et al Influence of pointing error and detector noise on the bit error rate performance in ground-to-satellite laser uplink communication system
[C]// 2017 3rd IEEE International Conference on Computer & Communications Chengdu, China : IEEE , 2017 : 240 -243 .
[本文引用: 1]
[24]
张秉华 , 张守辉 . 光电成像跟踪系统 [M]. 成都 : 电子科技大学出版社 , 2003 .
[本文引用: 1]
ZHANG Binghua ZHANG Shouhui . Photoelectric imaging tracking system [M]. Chengdu : Chengdu University of Electronic Science and Technology Press , 2003 .
[本文引用: 1]
[25]
BARO M CONIJN E DANNENBERG J , et al Apportionment and analysis of satellite pointing performance: Illustrative use case of space systems engineering
[C]// IEEE International Symposium on Systems Engineering Vienna, Austria : IEEE , 2017 : 1 -6 .
[本文引用: 1]
[26]
MADNI A BRADLEY N CERVANTES D , et al Pointing error budget development and methodology on the psyche project
[C]// 2021 IEEE Aerospace Conference (50100) Big Sky, USA : IEEE , 2021 : 1 -18 .
[本文引用: 1]
Pointing error angle effect on the performance of 10 Gbps ultra-long satellite optical wireless communication
1
2021
... 自由空间光学(FSO)系统通过在大气中传输激光束建立点对点的通信联系,可以提供高安全性和不受管制的带宽,支持1~2 km范围内的高数据速率应用.然而,光信号受到指向误差的影响,造成接收端处信号光光束中心偏离接收天线中心位置,使接收信号光强衰减.如果空间激光链路束散角小,即使指向误差很小,也会严重影响链路性能,甚至导致通信失败[1 ] . ...
Outage capacity optimization for free-space optical links with pointing errors
3
2007
... 在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... [2 ⇓ -4 ].除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... 式中:ϕ 为0~360°任意角度. 当μ a =μ e =0, σ a 2 σ e 2 σ 2 ,此时指向误差角的概率密度分布为瑞利分布[2 ⇓ -4 ] ,即 ...
Impact of pointing errors on the performance of generalized atmospheric optical channels
2
2012
... 在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... 式中:ϕ 为0~360°任意角度. 当μ a =μ e =0, σ a 2 σ e 2 σ 2 ,此时指向误差角的概率密度分布为瑞利分布[2 ⇓ -4 ] ,即 ...
指向误差下高斯光束几何衰减模型分析
2
2021
... 在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... 式中:ϕ 为0~360°任意角度. 当μ a =μ e =0, σ a 2 σ e 2 σ 2 ,此时指向误差角的概率密度分布为瑞利分布[2 ⇓ -4 ] ,即 ...
Analysis of geometric attenuation model of Gaussian beam under pointing error
2
2021
... 在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... 式中:ϕ 为0~360°任意角度. 当μ a =μ e =0, σ a 2 σ e 2 σ 2 ,此时指向误差角的概率密度分布为瑞利分布[2 ⇓ -4 ] ,即 ...
OOK performance for terrestrial FSO links in turbulent atmosphere with pointing errors modeled by hoyt distributions
2
2011
... 在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... 当μ a =μ e =0, σ a 2 ≠ σ e 2 [5 ] ,即 ...
On the asymptotic capacity of dual-aperture FSO systems with generalized pointing error model
3
2016
... 在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... [6 ]和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... 当μ a +μ e ≠0, σ a 2 = σ e 2 = σ 2 ,此时指向误差角的概率密度分布为莱斯分布[6 ] ,即 ...
On the effect of correlated sways on generalized misalignment fading for terrestrial FSO links
3
2017
... 在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... [7 ]提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... 当θa ~N (μa , σ a 2 ) ,θe ~N (μe , σ e 2 ) 时,指向误差角的概率密度分布为贝克曼分布[7 ] ,即 ...
Laser satellite communication network-vibration effect and possible solutions
3
1997
... 在FSO通信系统中,无论是采用主动补偿还是振动抑制的方法来降低指向误差的影响,前提均是需要得到一个准确的指向误差模型.Farid等[2 ] 提出发射端因受扰动的影响,使接收端信号在两个正交方向上发生满足高斯分布的偏移.两个正交方向上发生的偏移分别对应发射终端方位角度和俯仰角度的指向误差,最后指向误差的概率密度分布满足瑞利分布[2 ⇓ -4 ] .除了瑞利分布,当方位和俯仰角上的指向误差分布具有不同均值和方差时,指向误差概率密度分布模型又可分为霍伊特、莱斯和贝克曼分布[5 ⇓ -7 ] .Alquwaiee等[6 ] 和Boluda-Ruiz等[7 ] 提出上述分布可以统一表示为贝克曼分布的特例情况.Arnon等[8 ] 指出,跟踪系统受到各种噪声源的干扰,使进入控制系统的跟踪信号伴有噪声,从而影响控制系统的指向性能,带来指向误差.跟踪噪声主要有约翰逊噪声、暗电流散粒噪声、信号散粒噪声等,因跟踪噪声引起的指向误差建模为高斯分布模型. ...
... 在图2 所示诸多误差源中,跟踪系统中的噪声和平台内部的机械冲击是引起指向误差的主要因素.这些原因中的任何一个致使天线对不齐都可能导致链路故障或严重降低系统的性能.当平台内部扰动为引起指向误差的主要原因时,指向误差的概率密度呈瑞利分布;考虑系统校准误差造成静态偏置误差的存在,瑞利分布转为莱斯分布.当跟踪噪声为引起指向误差的主要原因时,指向误差服从高斯分布[8 ] . ...
... 分析带有机械冲击,如波导开关、太阳能阵列驱动机制、推进器点火的系统时,假设跟踪系统的信噪比较大,方位角和俯仰角在跟踪过程中独立且分布相同,因此径向指向误差角服从瑞利分布[8 ] ,其概率密度函数如式(6);当静态偏置误差考虑在内时,瑞利分布转化为莱斯分布,其概率密度函数如式(8);当跟踪噪声为主要误差源时,通常采用高斯模型,其概率密度函数如式(4). ...
1
2006
... 按指向误差的性质可将其分为动态随机误差和静态偏置误差.动态随机误差主要由飞行器平台扰动以及跟踪系统引起的噪声等.静态偏置误差的误差源主要为系统校准误差,比如热真空环境引起的视轴误差和器件误差等.一般情况下,这两种指向误差同时存在,对通信的性能有重大影响,不仅影响通信质量,也决定系统某些参数的设计[9 -10 ] . ...
1
2006
... 按指向误差的性质可将其分为动态随机误差和静态偏置误差.动态随机误差主要由飞行器平台扰动以及跟踪系统引起的噪声等.静态偏置误差的误差源主要为系统校准误差,比如热真空环境引起的视轴误差和器件误差等.一般情况下,这两种指向误差同时存在,对通信的性能有重大影响,不仅影响通信质量,也决定系统某些参数的设计[9 -10 ] . ...
Precision pointing error analysis in a satellite optical communication optical system
2
1990
... 按指向误差的性质可将其分为动态随机误差和静态偏置误差.动态随机误差主要由飞行器平台扰动以及跟踪系统引起的噪声等.静态偏置误差的误差源主要为系统校准误差,比如热真空环境引起的视轴误差和器件误差等.一般情况下,这两种指向误差同时存在,对通信的性能有重大影响,不仅影响通信质量,也决定系统某些参数的设计[9 -10 ] . ...
... RMS value of angular micro-vibration simulation signals of four aircrafts
Tab.3 飞行器 已知模型RMS/μrad 仿真模型RMS/μrad OLYMPUS 16.0[14 ] 15.94 ETS-VI 48.9[15 ] 48.91 OICETS 43.8[13 ] 43.93 MICIUS 9.3[10 ] 9.25
3 建立指向误差单一分布模型 分析带有机械冲击,如波导开关、太阳能阵列驱动机制、推进器点火的系统时,假设跟踪系统的信噪比较大,方位角和俯仰角在跟踪过程中独立且分布相同,因此径向指向误差角服从瑞利分布[8 ] ,其概率密度函数如式(6);当静态偏置误差考虑在内时,瑞利分布转化为莱斯分布,其概率密度函数如式(8);当跟踪噪声为主要误差源时,通常采用高斯模型,其概率密度函数如式(4). ...
Minimization of outage probability of WiMAX link supported by laser link between a high-altitude platform and a satellite
2
2009
... 为了便于分析,大多数文献认为静态偏置误差可以忽略[11 ⇓ -13 ] ,即可用瑞利分布来描述指向误差.从图2 可以看出,用单一的分布模型来模拟指向误差无法考虑多种误差原因.本文从以上各种引起指向误差的原因出发,给出混合分布模型公式,与单一分布模型进行比较,找出最符合空间飞行器指向误差的混合分布模型,并分析混合权重的意义. ...
... 根据前述5个步骤,利用OLYMPUS、ETS-VI、OICETS和MICIUS飞行器的角微振动功率谱密度获得了角微振动信号的时域拟合信号,即指向误差拟合信号.对其进行统计分析可得到指向误差拟合信号的标准差σ 、均值μ ,如表4 所示.将表4 参数分别代入单一分布(高斯分布、瑞利分布、莱斯分布)的概率密度函数,即可得到指向误差的单一分布模型.图7 为单一分布模型与指向误差拟合信号的概率密度曲线对比图.图中静态偏置误差ξ 被认为是零均值的随机值[11 ⇓ -13 ] ,则莱斯分布退化为瑞利分布,二者曲线接近. ...
Optimization of a laser satellite communication system with an optical preamplifier
2
2004
... 为了便于分析,大多数文献认为静态偏置误差可以忽略[11 ⇓ -13 ] ,即可用瑞利分布来描述指向误差.从图2 可以看出,用单一的分布模型来模拟指向误差无法考虑多种误差原因.本文从以上各种引起指向误差的原因出发,给出混合分布模型公式,与单一分布模型进行比较,找出最符合空间飞行器指向误差的混合分布模型,并分析混合权重的意义. ...
... 根据前述5个步骤,利用OLYMPUS、ETS-VI、OICETS和MICIUS飞行器的角微振动功率谱密度获得了角微振动信号的时域拟合信号,即指向误差拟合信号.对其进行统计分析可得到指向误差拟合信号的标准差σ 、均值μ ,如表4 所示.将表4 参数分别代入单一分布(高斯分布、瑞利分布、莱斯分布)的概率密度函数,即可得到指向误差的单一分布模型.图7 为单一分布模型与指向误差拟合信号的概率密度曲线对比图.图中静态偏置误差ξ 被认为是零均值的随机值[11 ⇓ -13 ] ,则莱斯分布退化为瑞利分布,二者曲线接近. ...
In-orbit measurements of spacecraft microvibrations for satellite laser communication links
6
2010
... 为了便于分析,大多数文献认为静态偏置误差可以忽略[11 ⇓ -13 ] ,即可用瑞利分布来描述指向误差.从图2 可以看出,用单一的分布模型来模拟指向误差无法考虑多种误差原因.本文从以上各种引起指向误差的原因出发,给出混合分布模型公式,与单一分布模型进行比较,找出最符合空间飞行器指向误差的混合分布模型,并分析混合权重的意义. ...
... JAXA对光学轨道间通信工程试验卫星(OICETS)角微振动功率谱密度曲线的测量结果[13 ] 显示:OICETS的角微振动幅值在1~1 024 Hz频段一直大幅衰减,对通信链路影响较大的角微振动主要集中在10 Hz以内.在最坏的情况下,OICETS在1~1 024 Hz频段的角扰动RMS在旋转周期中约为43.8 μrad. ...
... Angular micro-vibration characteristics of four aircrafts
Tab.1 飞行器 指向误差RMS/μrad f 0 /Hzα β 1 Hz处衰减/dB 100 Hz处衰减/dB 1000 Hz处衰减/dB OLYMPUS 16.0[14 ] 1 2 160 3 40 60 ETS-VI 48.9[15 ] 10 2 160 3 20 40 OICETS 43.8[13 ] 0.1 4 5000 40 120 160 MICIUS 9.3[16 ] 1 2 10 3 40 40
参考表1 的参数给出图3 中4个飞行器角微振动功率谱密度(S PSD )的拟合曲线.由于4个拟合曲线的角微振动总功率均大于实际测量的角微振动总功率,所以即使发生更大幅度的角微振动,以上4条拟合曲线仍可表示飞行器的实际角微振动情况. ...
... 由图6 可见,OLYMPUS的大幅值角微振动主要集中在1 Hz以内,频率大于1 Hz以后,幅度很快减小;ETS-VI的大幅值角微振动主要集中在10 Hz以内,频率大于1 Hz以后,幅度很快减小;OICETS角微振动在1~1 024 Hz频率范围时,大幅值振动主要集中在10 Hz以内,而且衰减速度高于其他3个飞行器;MICIUS角微振动虽与OLYMPUS在趋势上相似,但小于1 Hz的低频角微振动幅度更小,在1~10 Hz内衰减更快.这也符合文献[13 ⇓ ⇓ -16 ]中给出的结论. ...
... RMS value of angular micro-vibration simulation signals of four aircrafts
Tab.3 飞行器 已知模型RMS/μrad 仿真模型RMS/μrad OLYMPUS 16.0[14 ] 15.94 ETS-VI 48.9[15 ] 48.91 OICETS 43.8[13 ] 43.93 MICIUS 9.3[10 ] 9.25
3 建立指向误差单一分布模型 分析带有机械冲击,如波导开关、太阳能阵列驱动机制、推进器点火的系统时,假设跟踪系统的信噪比较大,方位角和俯仰角在跟踪过程中独立且分布相同,因此径向指向误差角服从瑞利分布[8 ] ,其概率密度函数如式(6);当静态偏置误差考虑在内时,瑞利分布转化为莱斯分布,其概率密度函数如式(8);当跟踪噪声为主要误差源时,通常采用高斯模型,其概率密度函数如式(4). ...
... 根据前述5个步骤,利用OLYMPUS、ETS-VI、OICETS和MICIUS飞行器的角微振动功率谱密度获得了角微振动信号的时域拟合信号,即指向误差拟合信号.对其进行统计分析可得到指向误差拟合信号的标准差σ 、均值μ ,如表4 所示.将表4 参数分别代入单一分布(高斯分布、瑞利分布、莱斯分布)的概率密度函数,即可得到指向误差的单一分布模型.图7 为单一分布模型与指向误差拟合信号的概率密度曲线对比图.图中静态偏置误差ξ 被认为是零均值的随机值[11 ⇓ -13 ] ,则莱斯分布退化为瑞利分布,二者曲线接近. ...
In-orbit measurements of microaccelerations of ESA’s communication satellite Olympus
5
1990
... ESA对奥林巴斯通信卫星OLYMPUS角微振动功率谱密度曲线的测量结果[14 ] 显示:OLYMPUS的角微振动幅值从f 0 =1 Hz开始大幅衰减,对通信链路影响较大的角微振动主要集中在100 Hz以内,总的指向误差均方根(RMS)为16.3 μrad. ...
... 步骤2 确定截止频率.采用函数S (f )作为飞行器角微振动功率谱密度的拟合函数[14 ] ,根据步骤1中角微振动功率谱密度曲线的规律给出飞行器拟合函数参数的取值和振动特性,具体结果如表1 所示.S (f )可表示为 ...
... Angular micro-vibration characteristics of four aircrafts
Tab.1 飞行器 指向误差RMS/μrad f 0 /Hzα β 1 Hz处衰减/dB 100 Hz处衰减/dB 1000 Hz处衰减/dB OLYMPUS 16.0[14 ] 1 2 160 3 40 60 ETS-VI 48.9[15 ] 10 2 160 3 20 40 OICETS 43.8[13 ] 0.1 4 5000 40 120 160 MICIUS 9.3[16 ] 1 2 10 3 40 40
参考表1 的参数给出图3 中4个飞行器角微振动功率谱密度(S PSD )的拟合曲线.由于4个拟合曲线的角微振动总功率均大于实际测量的角微振动总功率,所以即使发生更大幅度的角微振动,以上4条拟合曲线仍可表示飞行器的实际角微振动情况. ...
... 由图6 可见,OLYMPUS的大幅值角微振动主要集中在1 Hz以内,频率大于1 Hz以后,幅度很快减小;ETS-VI的大幅值角微振动主要集中在10 Hz以内,频率大于1 Hz以后,幅度很快减小;OICETS角微振动在1~1 024 Hz频率范围时,大幅值振动主要集中在10 Hz以内,而且衰减速度高于其他3个飞行器;MICIUS角微振动虽与OLYMPUS在趋势上相似,但小于1 Hz的低频角微振动幅度更小,在1~10 Hz内衰减更快.这也符合文献[13 ⇓ ⇓ -16 ]中给出的结论. ...
... RMS value of angular micro-vibration simulation signals of four aircrafts
Tab.3 飞行器 已知模型RMS/μrad 仿真模型RMS/μrad OLYMPUS 16.0[14 ] 15.94 ETS-VI 48.9[15 ] 48.91 OICETS 43.8[13 ] 43.93 MICIUS 9.3[10 ] 9.25
3 建立指向误差单一分布模型 分析带有机械冲击,如波导开关、太阳能阵列驱动机制、推进器点火的系统时,假设跟踪系统的信噪比较大,方位角和俯仰角在跟踪过程中独立且分布相同,因此径向指向误差角服从瑞利分布[8 ] ,其概率密度函数如式(6);当静态偏置误差考虑在内时,瑞利分布转化为莱斯分布,其概率密度函数如式(8);当跟踪噪声为主要误差源时,通常采用高斯模型,其概率密度函数如式(4). ...
In-orbit measurements of short term attitude and vibrational environment on the Engineering Test Satellite VI using laser communication equipment
4
2001
... NASDA对工程测试卫星ETS-VI角微振动功率谱密度曲线的测量结果[15 ] 显示:ETS-VI的角微振动幅值从f 0 =10 Hz开始大幅衰减,对通信链路影响较大的角微振动主要集中在500 Hz以内,在0.39~250 Hz范围内,总的指向误差RMS为48.9 μrad. ...
... Angular micro-vibration characteristics of four aircrafts
Tab.1 飞行器 指向误差RMS/μrad f 0 /Hzα β 1 Hz处衰减/dB 100 Hz处衰减/dB 1000 Hz处衰减/dB OLYMPUS 16.0[14 ] 1 2 160 3 40 60 ETS-VI 48.9[15 ] 10 2 160 3 20 40 OICETS 43.8[13 ] 0.1 4 5000 40 120 160 MICIUS 9.3[16 ] 1 2 10 3 40 40
参考表1 的参数给出图3 中4个飞行器角微振动功率谱密度(S PSD )的拟合曲线.由于4个拟合曲线的角微振动总功率均大于实际测量的角微振动总功率,所以即使发生更大幅度的角微振动,以上4条拟合曲线仍可表示飞行器的实际角微振动情况. ...
... 由图6 可见,OLYMPUS的大幅值角微振动主要集中在1 Hz以内,频率大于1 Hz以后,幅度很快减小;ETS-VI的大幅值角微振动主要集中在10 Hz以内,频率大于1 Hz以后,幅度很快减小;OICETS角微振动在1~1 024 Hz频率范围时,大幅值振动主要集中在10 Hz以内,而且衰减速度高于其他3个飞行器;MICIUS角微振动虽与OLYMPUS在趋势上相似,但小于1 Hz的低频角微振动幅度更小,在1~10 Hz内衰减更快.这也符合文献[13 ⇓ ⇓ -16 ]中给出的结论. ...
... RMS value of angular micro-vibration simulation signals of four aircrafts
Tab.3 飞行器 已知模型RMS/μrad 仿真模型RMS/μrad OLYMPUS 16.0[14 ] 15.94 ETS-VI 48.9[15 ] 48.91 OICETS 43.8[13 ] 43.93 MICIUS 9.3[10 ] 9.25
3 建立指向误差单一分布模型 分析带有机械冲击,如波导开关、太阳能阵列驱动机制、推进器点火的系统时,假设跟踪系统的信噪比较大,方位角和俯仰角在跟踪过程中独立且分布相同,因此径向指向误差角服从瑞利分布[8 ] ,其概率密度函数如式(6);当静态偏置误差考虑在内时,瑞利分布转化为莱斯分布,其概率密度函数如式(8);当跟踪噪声为主要误差源时,通常采用高斯模型,其概率密度函数如式(4). ...
Angular micro-vibration of the Micius satellite measured by an optical sensor and the method for its suppression
3
2021
... 上海微型卫星工程中心对量子科学实验卫星MICIUS角微振动功率谱密度曲线的测量结果[16 ] 显示:MICIUS随着频率的增加,能量呈下降趋势,大部分能量集中在低频带.在1~500 Hz角微振动引起的指向误差为9.3 μrad,不大于10 Hz的低频范围内频率分量占78.6%. ...
... Angular micro-vibration characteristics of four aircrafts
Tab.1 飞行器 指向误差RMS/μrad f 0 /Hzα β 1 Hz处衰减/dB 100 Hz处衰减/dB 1000 Hz处衰减/dB OLYMPUS 16.0[14 ] 1 2 160 3 40 60 ETS-VI 48.9[15 ] 10 2 160 3 20 40 OICETS 43.8[13 ] 0.1 4 5000 40 120 160 MICIUS 9.3[16 ] 1 2 10 3 40 40
参考表1 的参数给出图3 中4个飞行器角微振动功率谱密度(S PSD )的拟合曲线.由于4个拟合曲线的角微振动总功率均大于实际测量的角微振动总功率,所以即使发生更大幅度的角微振动,以上4条拟合曲线仍可表示飞行器的实际角微振动情况. ...
... 由图6 可见,OLYMPUS的大幅值角微振动主要集中在1 Hz以内,频率大于1 Hz以后,幅度很快减小;ETS-VI的大幅值角微振动主要集中在10 Hz以内,频率大于1 Hz以后,幅度很快减小;OICETS角微振动在1~1 024 Hz频率范围时,大幅值振动主要集中在10 Hz以内,而且衰减速度高于其他3个飞行器;MICIUS角微振动虽与OLYMPUS在趋势上相似,但小于1 Hz的低频角微振动幅度更小,在1~10 Hz内衰减更快.这也符合文献[13 ⇓ ⇓ -16 ]中给出的结论. ...
空间光通信卫星平台振动实时模拟
1
2007
... 步骤4 滤出角微振动随机数并求其概率密度曲线.利用设计的滤波器对高斯白噪声进行滤波,然后在滤波器模块后加入增益模块,调整增益,改变角微振动拟合信号的幅值并得到角微振动的时域信号[17 -18 ] ,即为指向误差时域信号,如图5 所示.图5 反映出4个飞行器的角微振动信号分别在100、200、300和20 μrad以下.对调整后的时域信号进行傅里叶变换求功率谱密度,功率谱密度曲线如图6 所示. ...
Real-time simulation of satellite-platform vibration of space optical communication
1
2007
... 步骤4 滤出角微振动随机数并求其概率密度曲线.利用设计的滤波器对高斯白噪声进行滤波,然后在滤波器模块后加入增益模块,调整增益,改变角微振动拟合信号的幅值并得到角微振动的时域信号[17 -18 ] ,即为指向误差时域信号,如图5 所示.图5 反映出4个飞行器的角微振动信号分别在100、200、300和20 μrad以下.对调整后的时域信号进行傅里叶变换求功率谱密度,功率谱密度曲线如图6 所示. ...
1
2016
... 步骤4 滤出角微振动随机数并求其概率密度曲线.利用设计的滤波器对高斯白噪声进行滤波,然后在滤波器模块后加入增益模块,调整增益,改变角微振动拟合信号的幅值并得到角微振动的时域信号[17 -18 ] ,即为指向误差时域信号,如图5 所示.图5 反映出4个飞行器的角微振动信号分别在100、200、300和20 μrad以下.对调整后的时域信号进行傅里叶变换求功率谱密度,功率谱密度曲线如图6 所示. ...
1
2016
... 步骤4 滤出角微振动随机数并求其概率密度曲线.利用设计的滤波器对高斯白噪声进行滤波,然后在滤波器模块后加入增益模块,调整增益,改变角微振动拟合信号的幅值并得到角微振动的时域信号[17 -18 ] ,即为指向误差时域信号,如图5 所示.图5 反映出4个飞行器的角微振动信号分别在100、200、300和20 μrad以下.对调整后的时域信号进行傅里叶变换求功率谱密度,功率谱密度曲线如图6 所示. ...
正态分布和瑞利分布混合情形下的参数估计及分类问题
1
2016
... 为了进一步提高模型的准确度,参考王小英等[19 ] 、胡耀金等[20 ] 、Tekbıyık等[21 ] 提出的混合分布的一般形式: ...
The parameter estimation and classification under mixture model of normal and Rayleigh distribution
1
2016
... 为了进一步提高模型的准确度,参考王小英等[19 ] 、胡耀金等[20 ] 、Tekbıyık等[21 ] 提出的混合分布的一般形式: ...
基于高斯混合模型的光纤罗经误差概率分布建模
1
2021
... 为了进一步提高模型的准确度,参考王小英等[19 ] 、胡耀金等[20 ] 、Tekbıyık等[21 ] 提出的混合分布的一般形式: ...
Modeling of error probability distribution of fiber-optic gyrocompass based on Gaussian mixture model
1
2021
... 为了进一步提高模型的准确度,参考王小英等[19 ] 、胡耀金等[20 ] 、Tekbıyık等[21 ] 提出的混合分布的一般形式: ...
Modeling and analysis of short distance sub-terahertz communication channel via mixture of gamma distribution
1
2021
... 为了进一步提高模型的准确度,参考王小英等[19 ] 、胡耀金等[20 ] 、Tekbıyık等[21 ] 提出的混合分布的一般形式: ...
经典最小二乘与全最小二乘法及其参数估计
1
2009
... 常用的参数估计有最小二乘估计、矩估计、极大似然估计.采用最小二乘估计法估计混合分布模型的参数[22 ] . ...
Classical least squares and total least squares and their parameter estimation
1
2009
... 常用的参数估计有最小二乘估计、矩估计、极大似然估计.采用最小二乘估计法估计混合分布模型的参数[22 ] . ...
Influence of pointing error and detector noise on the bit error rate performance in ground-to-satellite laser uplink communication system
1
2017
... 在对指向误差进行预分配时,平台扰动与跟踪噪声带来的误差预算占有不同比例[23 ⇓ -25 ] .这在混合分布模型中表现为权重w 这一重要参数.混合分布模型的权重会因不同飞行器在执行不同空间探测或通信任务时发生改变,从而及时反映引起指向误差变化的误差源情况.利用参数估计得到4个飞行器指向误差的混合分布模型的权重占比,结果如表5 所示. ...
1
2003
... 在对指向误差进行预分配时,平台扰动与跟踪噪声带来的误差预算占有不同比例[23 ⇓ -25 ] .这在混合分布模型中表现为权重w 这一重要参数.混合分布模型的权重会因不同飞行器在执行不同空间探测或通信任务时发生改变,从而及时反映引起指向误差变化的误差源情况.利用参数估计得到4个飞行器指向误差的混合分布模型的权重占比,结果如表5 所示. ...
1
2003
... 在对指向误差进行预分配时,平台扰动与跟踪噪声带来的误差预算占有不同比例[23 ⇓ -25 ] .这在混合分布模型中表现为权重w 这一重要参数.混合分布模型的权重会因不同飞行器在执行不同空间探测或通信任务时发生改变,从而及时反映引起指向误差变化的误差源情况.利用参数估计得到4个飞行器指向误差的混合分布模型的权重占比,结果如表5 所示. ...
Apportionment and analysis of satellite pointing performance: Illustrative use case of space systems engineering
1
2017
... 在对指向误差进行预分配时,平台扰动与跟踪噪声带来的误差预算占有不同比例[23 ⇓ -25 ] .这在混合分布模型中表现为权重w 这一重要参数.混合分布模型的权重会因不同飞行器在执行不同空间探测或通信任务时发生改变,从而及时反映引起指向误差变化的误差源情况.利用参数估计得到4个飞行器指向误差的混合分布模型的权重占比,结果如表5 所示. ...
Pointing error budget development and methodology on the psyche project
1
2021
... 为了量化不同模型间的差异,对简单通信链路下QPSK信号受指向误差影响发生的误比特率(BER)进行仿真[26 ] .图10 给出指向误差单一分布主要模型(高斯分布、瑞利分布、莱斯分布)和混合分布主要模型(高斯-瑞利混合分布模型、高斯-莱斯混合分布模型)下,系统发生的BER情况,一方面给出指向误差拟合信号影响下的系统BER量化值,另一方面对比单一分布模型和混合分布模型与指向误差拟合信号之间的差距.图中:r SNR 为信噪比.表7 给出5种指向误差模型与指向误差拟合信号之间的BER仿真偏差. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}