

随着全球气候变化和冰川融化,北极航线的开放时间更长,极地航运和资源开发已成为国际上关注的焦点问题,吸引了越来越多的关于极地船舶冰区航行的研究工作.其中,准确预报冰阻力是科学评价船舶极地航行能力的重要指标,能够有效提高航行安全.由于船舶破冰是一种复杂的非线性动态响应过程,以及海冰本构模型的复杂性,所以国内外还没有一种准确且被广泛使用的冰阻力预报方法.
在冰阻力研究中,需要深刻地理解冰况、船体几何形状和船-冰作用过程.目前冰阻力计算方法主要有经验和半经验公式方法、冰池模型试验、全尺度试验方法、数值分析方法,其中最可靠的是冰池模型试验和全尺度试验,但它们既昂贵又耗时.数值分析是计算冰阻力的一种很好的替代方法,但它依赖于对船-冰相互作用机理的理解[1],往往会对一些条件进行简化和假设,从而对分析结果产生影响.常用的方法是经验半经验公式方法,但每种经验半经验公式都有其各自的适用范围、应用背景和基本假定,因此,在某些情况下,与模型试验对比,其计算误差高达40%[2].此外,大多数经验半经验公式将总阻力划分为不同的分量来预测平整冰作用下的阻力,关于冰道中有碎冰的阻力研究较少,因此,需要一种新的具有较高精度的模型来进行冰阻力预报.
近年来,机器学习方法被广泛应用于海洋工程领域中,其中,人工神经网络(ANN)方法在许多领域中得到了应用,相较于回归模型和其他统计方法,ANN具有更好的灵活性和泛化效果,能更好地处理复杂非线性问题.本文参考传统经验半经验公式,选取合适的输入特征量,以船舶模型试验数据为ANN模型的训练数据,对训练数据进行数据预处理和皮尔逊相关性分析,构建径向基(RBF)模型并用遗传算法(GA)进行网络优化.将实船试验和模型试验作为验证对象,与RBF和遗传算法优化径向基(RBF-GA)神经网络模型预报结果进行对比分析.
1 冰阻力预报方法
1.1 人工神经网络
自动分析建模的机器学习方法可用于处理复杂非线性问题,例如函数近似、分类和回归,ANN是机器学习领域中一种常用的方法.ANN是模仿人类思维的一种方式,是以工程技术手段模拟人脑神经网络结构和功能特征的系统,从本质上讲,它是一个大规模并行的非线性动态系统[3].虽然单个神经元结构简单,功能有限,但由多个神经元组成的网络系统具有良好的泛化能力.ANN由一组算法组成,这些算法通过输入数据集进行训练,以找出目标问题的最优假设函数,它已被证实是解决高维度非线性问题的一种可行和实用的方法.输入特征量(如船长和冰厚等)的数量对输出结果的可靠性有着重要影响,其数量越多,代表着训练模型的稳定性越好,但在选择特征量时,重点是要在方差和偏差之间建立良好的平衡,以便为预测提供良好的泛化效果.
ANN方法近年来得到了快速发展,已成功应用于许多工程领域,在海洋工程领域的应用相对新颖,研究人员正在探索将其应用于解决不同问题.Koushan[4]应用ANN方法预测船舶阻力和湿表面积,并使用多个拖曳试验结果验证了该模型.Couser等[5]成功地使用ANN预测双体船的船体阻力.Cui等[6]开发了一种基于机器学习的船舶设计优化方法.Yang等[7]提出了一种基于RBF算法的集装箱船阻力预报模型,用于预测集装箱船在不同吃水下的阻力.陈爱国等[8]以60艘船舶模型试验为数据集,提出了一种基于ANN方法的船舶阻力预报模型.张乔宇等[9]提出了一种基于经典机器学习回归预测模型,以预报船舶阻力.Kim等[10]介绍了一种基于ANN的冰阻力预报方法,用于预测船舶在平整冰中的航行阻力.Islam[11]提出了一种机器学习技术,用于船舶在敞水和冰上性能预测.Zhang等[12]提出了一种可解释的ANN冰阻力预报模型,在此基础上开展了冰厚和船速分布的统计分析工作,将冰阻力预报ANN模型应用于评估船舶在冰雪覆盖水域的运行情况.目前,基于ANN方法的冰阻力预报研究相对较少,在已有的研究中,冰阻力预报精度在一定范围内都比较准确.然而,要获得一个更先进、预测误差更低的模型,还有很多需要研究的内容.
1.2 冰阻力经验公式
为了建立一个可靠的冰阻力预报模型,选择合适的神经网络输入参数至关重要,目前6种常用的半经验公式可以为模型的输入特征选择提供重要依据.为了选择合适的神经网络输入特征,研究了半经验公式中使用的参数.根据6种常用的半经验公式,讨论了一些影响冰阻力的主要参数:
(1) Lewis等[15]总结了“风”级破冰船在冰海中航行的实船试验、 “风”级破冰船的模型试验、M-5和M-9船舶在淡水冰中的模型试验以及在盐水冰中的试验的冰阻力数据.根据这些数据,提出了冰阻力预报公式,假定为船速、冰厚度、冰密度和冰弯曲强度的函数.
(2) Vance[16]根据USCG Katmai Bay的全尺度试验,开发了一套与船舶长度和宽度相关的最佳回归方程,以预测破冰船航行阻力.
(3) Zahn等[17]通过USCG Mobile Bay全尺度试验,提出了冰阻力公式.阻力是船舶主尺度和冰厚的函数.
(4) Lindqvist[18]根据在波的尼亚海湾进行的实船试验开发了冰阻力预报公式,冰阻力分力主要分为破碎、弯曲和浸没,公式表示为船舶主尺度、船体形状系数、冰厚、冰摩擦系数和冰弯曲强度的函数.
(6) 考虑到5艘破冰船,Keinonen等[21]也进行了冰阻力预测研究.这些公式与船舶尺寸、船型、冰弯曲强度和环境温度等条件有关.
上述6个公式很好地说明了影响冰阻力的主要因素,主要参数如表1所示.
表1 经验和半经验公式主要参数
Tab.1
从表中可以看出,船长、船宽、船速、冰厚和弯曲强度被各经验半经验公式广泛采用,而水线角、弹性模量和雪厚采用较少.结合参数在模型试验和实船试验中出现的频次,且ANN本身不受输入特征物理特性的影响,本研究选取7个特征参数输入,分别为:船长、船宽、吃水、首柱倾角、船速、冰厚和弯曲强度,输出为冰阻力.对特征输入和冰阻力之间进行皮尔逊相关系数分析,并对数据集进行归一化处理.
2 神经网络训练的数据库和特征
2.1 数据集准备
表2 冰阻力预报模型数据集来源
Tab.2
| 船名 | 来源 | 冰况 |
|---|---|---|
| Ferry NB550 | 文献[22] | 平整冰 |
| CCGS (Terry Fox) | 文献[23] | 平整冰 |
| USCGC (Healy) | 平整冰 | |
| Korean RV (Araon) | 平整冰 | |
| ICE BREAKER PSV(KS1654) | 文献[24] | 平整冰 |
| MV Arctic | 文献[25] | 平整冰 |
| Polar Star | 平整冰 | |
| Japanese Model Ship | 平整冰 | |
| Terry Fox | 平整冰 | |
| PM Teshio | 平整冰 | |
| R-Class | 平整冰 | |
| Healy | 平整冰 | |
| SA-15 | 平整冰 | |
| Korean RV (Araon) | 文献[26] | 碎冰 |
| Terry Fox | 文献[27] | 碎冰 |
| An artic tanker | 文献[28] | 平整冰 |
| Icebreaking cargo vessel | 文献[29] | 碎冰 |
| Korean RV (Araon) | 文献[30] | 碎冰 |
| MT Uikku | 文献[31] | 平整冰 |
| MT Uikku | 文献[1] | 平整冰 |
| MT Uikku | 文献[2] | 平整冰 |
| Korean RV Araon | 文献[32] | 平整冰 |
| Arctic PSV | 平整冰 | |
| Icebreaking cargo vessel | 文献[33] | 碎冰 |
| A new icebreaker of China | 文献[34] | 平整冰 |
| 参数 | 比例系数 |
|---|---|
| 船长 | λ |
| 船宽 | λ |
| 吃水 | λ |
| 首柱倾角 | 1 |
| 船速 | λ1/2 |
| 水线角 | 1 |
| 冰厚 | λ |
| 弯曲强度 | λ |
| 冰密度 | 1 |
| 摩擦系数 | 1 |
| 冰阻力 | λ |
理想情况下,船舶全尺度试验是确定船舶冰阻力的最准确、可靠的方法.但由于其昂贵性、耗时性以及不可重复性,所以,大多数情况下通过船舶模型试验进行替代.由于尺度效应,将模型试验数据转换为全尺度试验数据时会存在一定的误差性.Schwarz[36]比较了破冰船CCGS FRANKLIN号模型试验和全尺度试验的冰阻力,结果表明,误差在8%以内,模型试验可用于船舶初步设计.因此,本文选用船舶模型试验数据作为ANN数据集.
2.2 数据预处理
图1
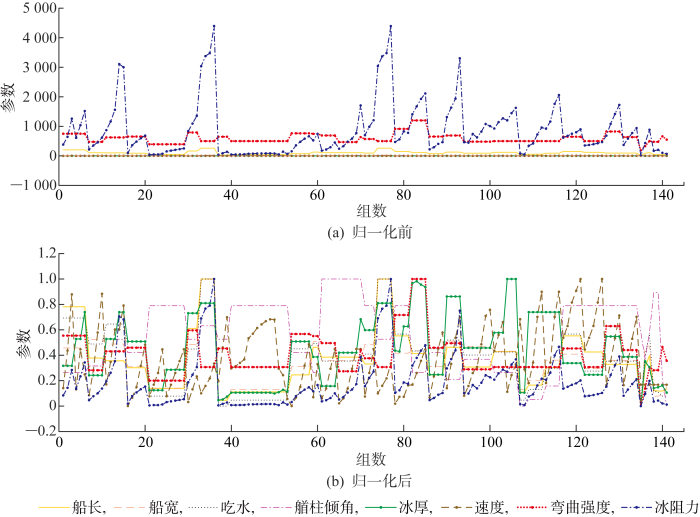
式中:zmax和zmin分别为一个特征量的最大值和最小值;z和z'分别为归一化前后的数据.
为了量化输入特征量和输出之间的线性关系,引入皮尔逊相关系数
式中:
表4给出了7个输入特征量和冰阻力之间的线性相关性.从表中可以看出,船宽、船长、吃水和冰厚与冰阻力之间高度相关,而首柱倾角和弯曲强度对冰阻力的依赖性相对较小,船速和冰阻力之间几乎没有相关性.
表4 特征选择和皮尔逊相关系数
Tab.4
| 类别 | 特征 | 取值 | ρx,y |
|---|---|---|---|
| 船舶相关参数 | 船速,v/kn | 0~11 | 0.056 |
| 船长,L/m | 26.155~259.2 | 0.630 | |
| 船宽,B/m | 7.5~44 | 0.774 | |
| 船舶吃水,T/m | 2.3~15 | 0.645 | |
| 首柱倾角,ϕ/(°) | 19~35 | -0.178 | |
| 冰相关参数 | 冰厚,hi/m | 0.2~1.6 | 0.628 |
| 冰弯曲强度,σf/kPa | 392~1 200 | 0.122 |
在船舶模型试验时,数据和参数的选择记录受试验本身环境的影响,一些因素可能会被理想化或忽略.例如,Lindqvist公式没有考虑破碎强度对冰阻力的影响,这对于破碎强度较低的波罗的海的冰况来说可能是合理的,但在其他海域的船舶全尺度试验中,当冰的破碎强度非常大时,总冰阻力可能会被低估.由于皮尔逊相关系数仅依赖于数据库,从表4中可以看出,船速和冰阻力之间的皮尔逊相关系数最小,这并不代表船速对冰阻力的影响最小,皮尔逊相关系数仅度量线性关系,即使相关系数为0,也可能存在有意义的关系.
3 神经网络模型训练
3.1 RBF神经网络
图2
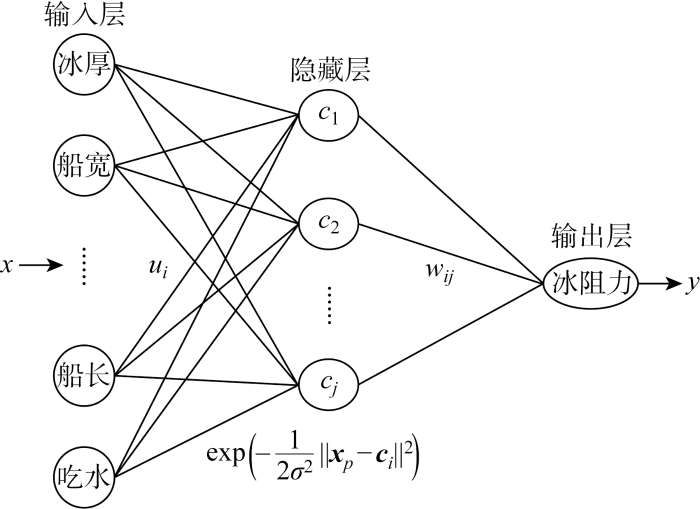
RBF神经网络的激活函数可以表示为
式中:
输出层的表达函数为
式中:
RBF和RBF-GA模型的函数关系分别表示为
式中:
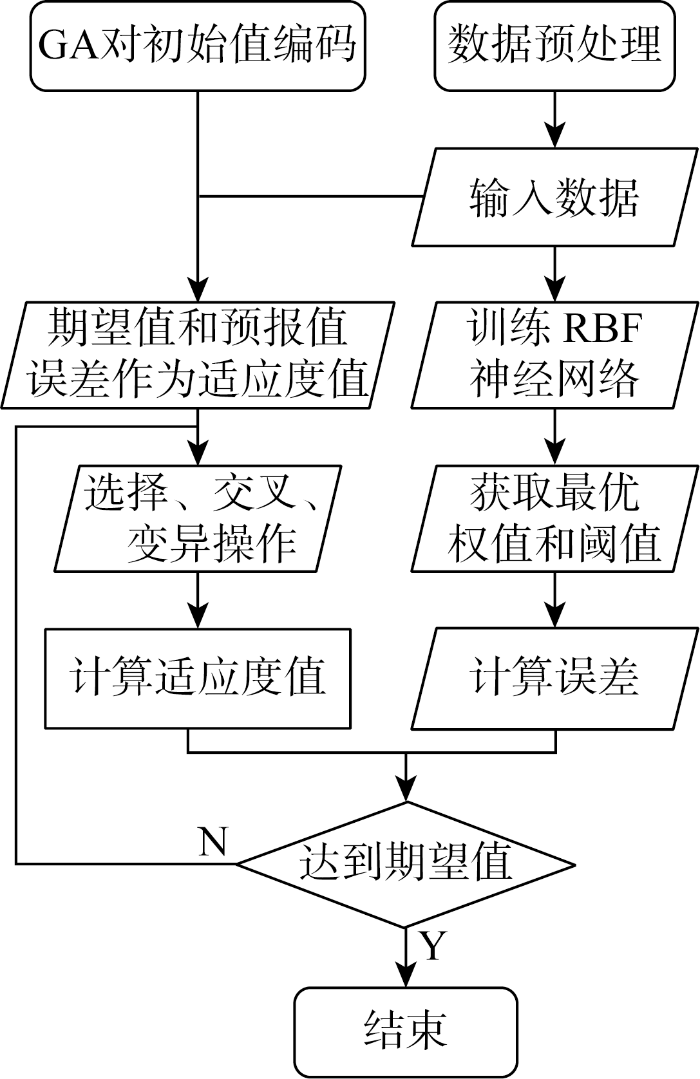
3.2 GA
GA是模仿自然界生物进化机制发展起来的随机全局搜索和优化方法,其本质是一种高效、并行、全局搜索的方法,能在搜索过程中自动获取和积累有关搜索空间的信息,并自适应地控制搜索过程以求得最佳解.
RBF-GA神经网络是用GA来优化RBF神经网络的初始权值和阈值,使优化后的RBF神经网络能更好地预测函数输出.RBF-GA神经网络包括种群初始化、适应度函数、选择操作、交叉操作和变异操作.在GA中,将问题的候选解用染色体表示,实现解空间向编码空间的映射,然后用随机数初始化一个种群,种群里的个体即为编码,根据个体得到RBF神经网络的初始权值和阈值,把网络预测输出和期望输出之间的误差绝对值和
图3
其中,适应度函数为
式中:
图4

表5 RBF-GA的超参数值
Tab.5
| 名称 | 数值 |
|---|---|
| 激活函数 | Sigmoid |
| 初始化粒子数 | 100 |
| 最大迭代次数 | 100 |
| 种群规模 | 50 |
| 交叉概率 | 0.1 |
| 变异概率 | 0.2 |
| 个体长度 | 10 |
| 最佳个体适应度 | 0.7 |
| 学习率 | 0.01 |
| 损失函数 | MSE |
RBF-GA的函数关系如下:
式中:
4 试验数据验证
4.1 某极地破冰船(模型试验)
图5
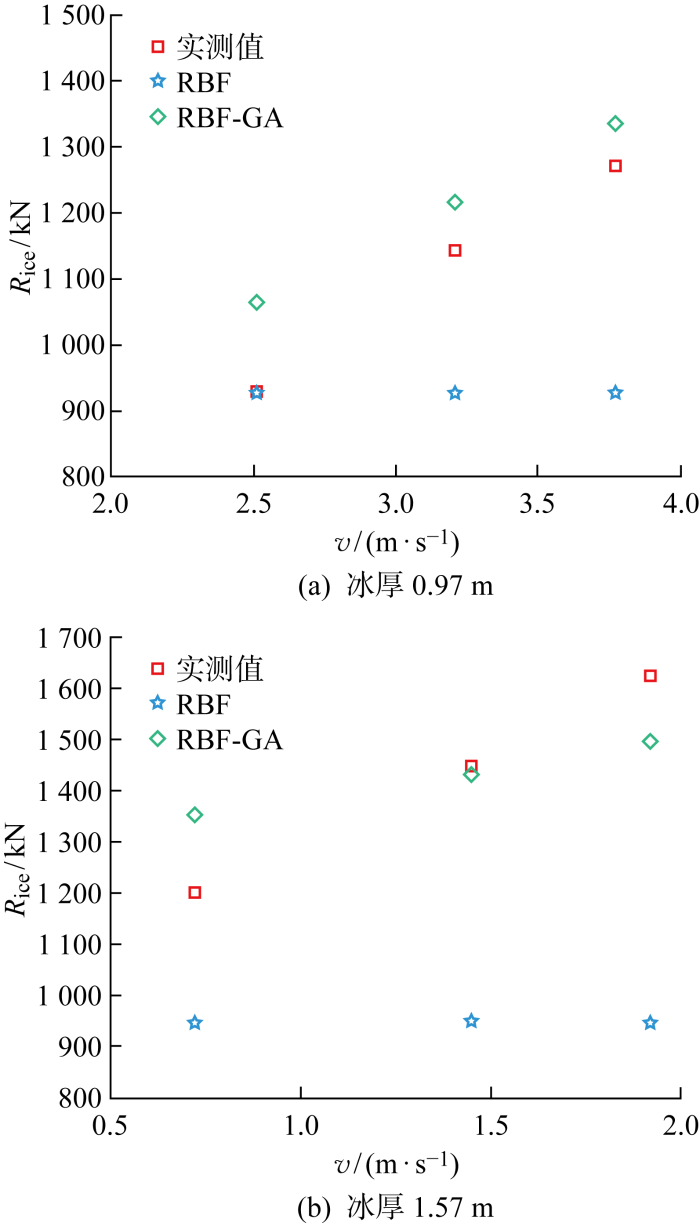
图5
在不同冰厚下的冰阻力模型预报
Fig.5
Ice resistance model prediction at different ice thicknesses
从图5中可以看出,RBF模型预报的冰阻力没有显著变化,RBF-GA模型预报结果随着船速的增加而增加.当冰厚为0.97 m时,RBF模型的预报值比测量值低得多,其平均误差为15.5%,RBF-GA模型的预报值比测量值偏高,其平均误差为8.6%.当冰厚为1.57 m时,RBF模型的预报值基本稳定在950 kN,其平均误差为32.5%,RBF-GA模型的预报值与实测值趋势一致,其平均误差为7.2%.可观察到,在不同的冰厚下,随着船速增加,RBF-GA 模型的预报误差约在8%,其与RBF模型相比,精度得到了明显的提高.
4.2 破冰船PSV(模型试验)
图6
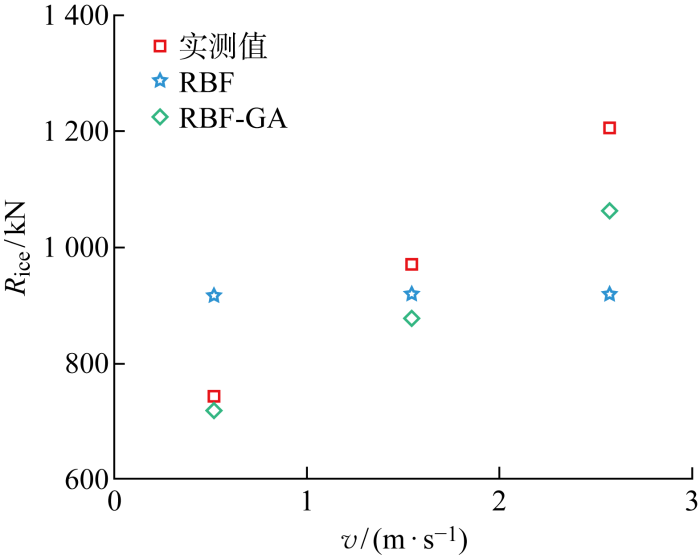
图6
基于ANN模型的破冰船PSV冰阻力预报
Fig.6
Ice resistance prediction of ice breaker PSV based on ANN model
4.3 Tor Viking II(实船试验)
Tor Viking II是一艘多用途破冰船,以该船在波罗的海北部的试验[1]为例,将RBF、RBF-GA模型预报结果与测量值进行比较分析,如图7所示.从图7中可以看出,当v<0.5 m/s时,RBF和RBF-GA预报值是实测值的几倍之多,其原因可能在于训练样本集中,当v=0~0.5 m/s时,冰阻力数据过少,从而导致模型在预测船舶低速航行下的冰阻力时,产生了较大的偏差.随着船速的增加,两个模型预报值与实测值误差也随之减小,当v=2~6 m/s时,RBF模型预报值与实测值之间的平均误差为11.9%,RBF-GA模型预报值与实测值更为接近,平均误差为7.4%.随着船速的增加,RBF模型预报值几乎不变;而RBF-GA模型预报值与实测值趋势一致,在一定程度上说明了经过GA优化后的RBF模型对船速的敏感性优于未被优化的RBF模型.
图7
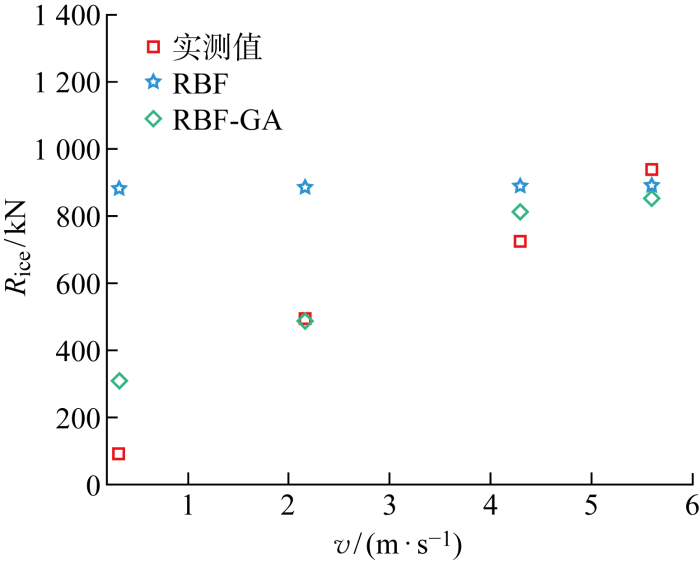
图7
基于ANN模型的Tor Viking II 冰阻力预报
Fig.7
Ice resistance prediction of Tor Viking II based on ANN model
5 结论
提出一种基于ANN的极地船舶冰阻力预报模型,介绍两种神经网络预测方法:RBF和RBF-GA,将两种预报模型与船舶模型试验和全尺度试验进行对比分析,考虑了在不同冰厚和船速下的模型预报结果,得出的主要结论如下:
(1) RBF-GA模型具有良好的泛化效果,对冰厚和船速的敏感性优于RBF模型,能够准确预报冰阻力,其平均误差在8%左右.
(2) 在高质量且充足的数据前提下,特征量归一化是保持每个特征权重在可比范围内的关键,可以有效确保预测结果的稳定性和准确性.
(3) 在数据库中,平整冰条件下的船舶试验数据较多,这使得神经网络模型在平整冰条件下的预报结果更加准确.低速航行时,预报误差较大,这可能由于训练样本缺少船舶低速试验数据.
(4) 船速和冰阻力之间的皮尔逊相关系数最小,这并不代表船速对冰阻力的影响最小.皮尔逊相关系数仅衡量线性关系,即使系数为0,也不代表着没有相关性.
参考文献
Numerical simulation of moored structure station keeping in level ice
[J].DOI:10.1016/j.coldregions.2011.10.008 URL [本文引用: 4]
Further study on level ice resistance and channel resistance for an icebreaking vessel
[J].DOI:10.1016/j.ijnaoe.2016.01.004 URL [本文引用: 3]
On the use of back propagation and radial basis function neural networks in surface roughness prediction
[J].DOI:10.1007/s40092-016-0146-x URL [本文引用: 1]
Empirical prediction of ship resistance and wetted surface area using artificial neural networks
[J].
Artificial neural networks for hull resistance prediction
[C]//
Learning-based ship design optimization approach
[J].DOI:10.1016/j.cad.2011.06.011 URL [本文引用: 1]
Research on accurate prediction of the container ship resistance by RBFNN and other machine learning algorithms
[J].
DOI:10.3390/jmse9040376
URL
[本文引用: 1]

Resistance is one of the important performance indicators of ships. In this paper, a prediction method based on the Radial Basis Function neural network (RBFNN) is proposed to predict the resistance of a 13500 transmission extension unit (13500TEU) container ship at different drafts. The predicted draft state in the known range is called interpolation prediction; otherwise, it is extrapolation prediction. First, ship features are extracted to make the resistance Rt prediction. The resistance prediction results show that the performance of the RBFNN is significantly better than the other four machine learning models, backpropagation neural network (BPNN), support vector machine (SVM), random forest (RF), and extreme gradient boosting (XGBoost). Then, the ship data is processed in a dimensionless manner, and the models mentioned above are used to predict the total resistance coefficient Ct of the container ship. The prediction results show that the RBFNN prediction model still performs well. Good results can be obtained by RBFNN in interpolation prediction, even when using part of dimensionless features. Finally, the accuracy of the prediction method based on RBFNN is greatly improved compared with the modified admiralty coefficient.
基于神经网络的船舶阻力计算数值实验研究
[J].
Numerical experimental study of ship resistance calculation based on neural network
[J].
基于机器学习的船舶阻力预报模型研究
[J].
Research on ship resistance prediction model based on machine learning
[J].
Prediction of ice resistance for ice-going ships in level ice using artificial neural network technique
[J].
Machine learning techniques for ship performance predictions in open water and ice
[C]//
Analysis of inland waterway ship performance in ice: Operation Time Window
[J].DOI:10.1016/j.oceaneng.2022.112409 URL [本文引用: 1]
Multivariable functional interpolation and adaptive networks
[J].
A hybrid algorithm to optimize RBF network architecture and parameters for nonlinear time series prediction
[J].DOI:10.1016/j.apm.2011.09.066 URL [本文引用: 1]
Methods for predicting icebreaking and ice resistance characteristics of icebreakers
[J].
A straightforward method for calculation of ice resistance of ships
[C]//
Icebreaker performance prediction
[J].
A numerical ice load prediction model based on ice-hull collision mechanism
[J].
DOI:10.3390/app10020692
URL
[本文引用: 2]
A simplified numerical model is introduced to predict ice impact force acting on the ship hull in level ice condition. The model is based on ice-hull collision mechanisms and the essential ice breaking characteristics. The two critical ice failure modes, localized crushing and bending breaking, are addressed. An energy method is used to estimate the crushing force and the indentation displacement for different geometry schemes of ice-ship interaction. Ice bending breaking scenario is taken as a semi-infinite plate under a distributed load resting on an elastic foundation. An integrated complete ice-hull impact event is introduced with ice failure modes and breaking patterns. Impact location randomness and number of broken ice wedges are considered in order to establish a stochastic model. The analysis is validated by comparison with the model ice test of a shuttle passenger ferry performed in May 2017 for SSPA Sweden AB at Aker Arctic Technology Inc. Good agreement is achieved with appropriate parameter selection assumed from the model test and when ice bending failure is dominant. This model can be used to predict the ice impact load and creates a bridge between design parameters (ice properties and ship geometry) and structure loads.
A prediction method of ice breaking resistance using a multiple regression analysis
[J].DOI:10.1515/ijnaoe-2015-0050 URL [本文引用: 2]
A Study on the Hull form design and ice resistance & propulsion performance of a platform support vessel (PSV) operated in the Arctic Ocean
[J].DOI:10.3744/SNAK.2018.55.6.497 URL [本文引用: 2]
A review on ice resistance prediction formula for icebreaking vessels
[C]//
A study of ship resistance characteristics for ice-strengthened vessel by broken ice channel width and size of broken ice pieces
[J].DOI:10.3744/SNAK.2018.55.1.22 URL [本文引用: 2]
A study on resistance test of icebreaker with synthetic ice
[J].DOI:10.3744/SNAK.2007.44.4.389 URL [本文引用: 2]
Calculation methods of icebreaking capability for a double-acting polar ship
[J].
DOI:10.3390/jmse8030179
URL
[本文引用: 2]
As a key parameter, icebreaking capability is often used to judge whether a polar ship could navigate in level ice at a certain speed. This paper presents two methods to calculate icebreaking capability. The first one is a static method based on the estimation of ice resistance under different ice thicknesses and ship speeds. The second is a dynamic method that involves solving the equation of motion. A series of model tests with a double-acting icebreaking tanker were also carried out in the ice basin of the Krylov State Research Center to measure ice resistances. The simulated ice resistances were compared with model tests results for both ahead and astern running operations. The calculated icebreaking capability based on static and dynamic methods was validated with the model test result. A good agreement was achieved between measurement and simulation. The discrepancy between the model test result and the result simulated by the static or dynamic method was minor.
Comparative study on the resistance performance of an icebreaking cargo vessel according to the variation of waterline angles in pack ice conditions
[J].DOI:10.2478/IJNAOE-2013-0219 URL [本文引用: 2]
Development of effective model test in pack ice conditions of square-type ice model basin
[J].DOI:10.1016/j.oceaneng.2013.04.011 URL [本文引用: 2]
Experimental and numerical study on ice resistance for icebreaking vessels
[J].DOI:10.1515/ijnaoe-2015-0044 URL [本文引用: 2]
Numerical and experimental investigation of the resistance performance of an icebreaking cargo vessel in pack ice conditions
[J].DOI:10.2478/IJNAOE-2013-0121 URL [本文引用: 2]
Experiments on navigating resistance of an icebreaker in snow covered level ice
[J].DOI:10.1016/j.coldregions.2018.04.007 URL [本文引用: 2]
Some latest developments in icebreaker technology
[J].
DOI:10.1115/1.3231256
URL
[本文引用: 1]
Icebreaking technology has been improved over the last 10–15 yr so that the installed power of icebreaking ships could be drastically reduced. The improvement is demonstrated on four examples of icebreaking ships, one conventional and three advanced concepts, which have shown their icebreaking ability already in full scale. The icebreaking capability of ships is suggested to be evaluated through model tests, theoretical approach and by full-scale measurements. The evaluation should be carried out for various ice conditions by resistance and self-propulsion tests. Finally, some thoughts are presented on features of an advanced icebreaker.
An overview of gradient descent optimization algorithms
[DB/OL]. (2016-09-15) [2022-08-18].
破冰船冰阻力估算方法研究
[J].
Research on ice resistance estimation method for icebreakers
[J].
Ice performance of the Swedish multi-purpose icebreaker Tor Viking II
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}