

从2017年“促进数字经济加快发展”到2023年“大力发展数字经济”,政府工作报告连续6年提到数字经济,且今年2月国务院印发了《数字中国建设整体布局规划》,充分表明国家对数字经济发展的重视和大力支持,有望推动我国数字经济开启发展新阶段.而实景三维中国建设是落实数字中国、平安中国、数字经济战略的重要举措,是落实国家新型基础设施建设的具体部署,是服务生态文明建设和经济社会发展的基础支撑[1].工程项目的数字化建设作为数字经济的重要组成部分,其数字化管理的要求也越来越迫切.实景三维可作为工程数字化建设的数字底座,实现工程施工现状的空间可视化,可以让工程参建各方立体形象地了解工程的进展以及相关信息.
“长江口二号”古船整体迁移与保护项目在完成古船整体迁移作业完成后,计划进入上海船厂旧址1#船坞对文物进行后期发掘考古.为保障文物发掘考古工作的顺利完成,要对上海船厂旧址1#船坞自身及周边环境的空间分布进行详细调查了解.同时,根据本工程特点及相关规范要求,还需要在古船进坞前后对船坞结构进行沉降和位移监测.借助该工程项目,利用无人机实景三维建模进行工程数字化的应用研究.
1 无人机倾斜摄影技术
倾斜摄影技术随着无人机航拍技术的发展应运而生,由于其相较于传统三维建模方式拥有低成本、高机动性、高精度、高时效的优点,所以倾斜摄影建模正逐渐成为重要的建模手段之一,在实景三维建模的发展过程中发挥重要作用.
倾斜摄影技术是国际测绘领域近年发展起来的一项高新技术,它颠覆了以往正射影像只能从垂直角度拍摄的局限,通过在同一飞行平台上搭载单镜头或多镜头相机,在飞行过程中从垂直、倾斜等多个角度同时采集影像,获取更为完整精确的地面地物信息.这些影像数据不仅具有分辨率高、视角广的特点,而且拥有真实的表面纹理[2].在建立建筑物模型与表面纹理的过程中,垂直影像中包含建筑顶面信息,倾斜影像能够提供地物侧面的视角,两者结合满足生成建筑物表面纹理和模型的需要.
目前,倾斜摄影技术已经广泛应用于实景三维地理信息数据的快速、自动化生产,实景三维地理信息数据作为一种新型的地理信息产品,可以为数字孪生工程、智慧园区、智慧城市、数字中国等提供基础的技术保障.
2 倾斜影像采集
2.1 测区概况
本测区地形地势较为平坦,测量范围为上海船厂旧址1#船坞坞墙两侧各100 m范围,东侧为上海船厂旧址2#船坞,南侧为防汛墙和黄浦江,西侧为3层和4层房屋,北侧为规划天章路,且紧邻在建工地.
2.2 航线规划
为了保证数据获取的质量和精度,在倾斜影像采集之前需进行航线规划,重点需要对无人机的航高、航摄时间、地面分辨率、重叠度、覆盖范围进行控制,使其能满足生产要求.本次测区为矩形测区,航线规划相对简单,采用平行航线折返拍摄,航线平行于测区长边方向.航向重叠率大于80%,旁向重叠率大于70%,地面分辨率优于3 cm.
(1) 航高确定.
式中: H为相对航高;M为摄影比例尺分母;f为焦距;
(2) 航摄时间的选择.根据实际情况选择晴朗无云、风力较小、能见度高的天气.航摄时间的选择遵循以下原则:航摄时,既要保证具有充足的光照度,又要避免过大的阴影.对高差特大陡峭山区和高层建筑特密集的大城市应当在当地正午前后各 1.5 h 内摄影,条件允许时,可实施云下摄影.
2.3 控制测量
控域网的图形宜成矩形,控域网的大小和像控点之间的跨度主要依据成图精度、航摄资料参数及对系统误差的处理等因素确定,控制网布点应以满足空中三角测量精度为原则.控制测量可采用网络实时动态测量(Real Time Kinematic, RTK)测量方式获取像片控制点的平面和高程坐标.
2.3.1 像控点布设
本次像控点布设,因为测区面积较小,通过对测区进行外业踏勘,根据现场情况共布设3个控制点,分别为P1、P2、P3 (见图1).
图1

像制点满足以下条件:
(1) 像控点的目标影像应清晰,易于判别,如选在交角良好(30°~150°)的细小线状物的交点、明显地物拐角点、像片上影像小于0.3 mm×0.3 mm的点状地物中心,同时应是高程变化较小的地方,易于准确定位和量测,常年相对固定;弧形地物等不应选作点位目标.
(2) 高程控制点点位目标应选在高程变化较小的地方,以线状地物的交点和平山头为宜;狭沟、高程变化急剧的斜坡等,均不宜选作点位目标.
(3) 测区内普遍难以找到合适的像控点目标时,航摄前铺设地面标志.
2.3.2 像控点测量
像片控制点平面和高程坐标使用中海达iRTK5和上海市CORS系统进行测定,以提高工作效率.RTK卫星状态符合表1所示的规定.表中:PDOP为位置精度因子.
表1 RTK卫星状态的基本要求
Tab.1
| 观测窗口状态 | 截止高度角15°以上的卫星个数 | PDOP值 |
|---|---|---|
| 良好 | >5 | <4 |
| 可用 | 5 | ≤6 |
| 不可用 | <5 | >6 |
控制点测量精度满足以下要求:RTK控制测量作业时采用多测回观测法,测回间的平面坐标分量较差绝对值小于25 mm,高程较差的绝对值小于50 mm,取各测回结果的平均值作为最终观测成果.
2.4 飞行作业
倾斜影像采集采用大疆经纬M300无人机搭载P1镜头进行外业测量.大疆经纬M300 RTK无人机是现代航空系统与大疆行业级无人机技术的融合,支持六向定位避障,可实现三通道1080p图传,工作中支持2.4/5.8 GHz自动实时切换双频通信,并采用了全新的机身结构和动力系统设计,拥有更稳定的飞行表现.P1镜头为 4 500 万高像素全画幅传感器,可以进行三轴云台智能摆动拍摄,机械全局快门为1/2 000 s,免像控的平面精度为3 cm,高程精度为5 cm.图2所示为无人机起飞前检查与参数设置.
图2

打开大疆经纬M300遥控器,点击Pilot进入界面,点击航线飞行,现场规划航线.点击飞行区域进行飞行参数设置,镜头选择P1(35 mm焦距),因需要倾斜飞行所以选择智能摆动拍摄,并设置重叠度、拍照模式以及边距等参数.参数设置完成后,点击保存按钮,上传航线进行飞行.
飞行结束后,将影像数据传至电脑,现场查看影像质量,分析影像的色调、灰度、纹理、反差等是否满足生产要求.影像的明暗度和清晰度以及色彩的饱和度很大程度上影响了模型质量[3].
3 实景三维模型构建
3.1 空中三角测量
在进行空中三角测量的时候,主要根据一些野外控制点进行控制点加密,进而得到加密点的平面位置和高程.为保证测量质量,需要做好原始无人机影像的矫正工作,重视对影像模糊部分的处理,以增强处理方式来提高影像的清晰度.其次,通过空中三角测量软件对校正处理后的图像进行自动获取连接点、自由网平差,整个过程可以对残差较严重的连接点进行删除,还可以将一些连接点加入其中,以此提高图像精度.完成刺点之后,需要做好区域平差解算工作,准确地评定各个精度指标,并形成高精度的空三加密成果.
3.2 三角网构建
根据高精度的空三加密成果,构建不规则三角网TIN,生成无纹理Mesh模型,且几何模型和拓扑关系都与原始模型相匹配,并对表面模型采用算法进行优化,使其表面细节更优质,平面更平滑.
3.3 纹理映射
构建完三维表面后,将优化后的TIN模型和纹理影像进行关联配准,对每个三角形面片选择最优映射纹理,同时将TIN模型和纹理影像之间的关联保存在文件中,得到带纹理的模型,一般要求模型纹理选片尽可能来自同一张影像,保持纹理的一致性,且需要减少模型间的纹理颜色差异.并建立多细节层次(LOD)以优化文件组织结构,增强模型分层浏览的效率[4].
3.4 软件模型生产与精度分析
使用Bently公司的Context Capture倾斜摄影建模软件中建立工程,创建新的区块,导入清晰的影像数据、正确的POS数据以及高精度的像控点数据.Contex tCapture软件在进行空三计算时采用两次空三加密方法,首先导入无人机采集的影像数据和POS数据进行第一次空三加密,在第一次空三加密基础上,导入像控点信息,并进行空间参考系统设置,再次进行空三角加密处理.像控点数据可有效提高空三加密过程的影像匹配精度和效率,还可实现目标坐标系统的转换.控制点测量精度结果如表2所示.表中:RMS为均方根值;X、Y分别为东方向、北方向.
表2 控制点测量精度
Tab.2
| 点号 | 已校 准的 影像数 | 重投影 误差 RMS/ 像素 | 三维 误差/mm | 水平 误差/mm | 垂直 误差/mm | |
|---|---|---|---|---|---|---|
| P1 | 18 | 0.39 | 6.6 | X: 4.9 Y: 4.3 | 0.9 | |
| P2 | 19 | 0.57 | 2.9 | X: -2.7 Y: 0.8 | 0.5 | |
| P3 | 15 | 0.43 | 5.6 | X: -2.3 Y: -5 | 0.3 | |
| 整体RMS | 0.47 | 5.3 | X: 3.5 Y: 3.8 | 0.6 | ||
根据Context Capture软件的生成的空三计算质量报告,空中三角测量整体质量较好, 平均地面分辨率为 24.6 mm/像素,控制点的水平和垂直误差均小于0.01 m.
空中三角测量满足要求的精度后,点击Context Capture软件的三维重建功能,选择三维模型的格式(可选择osgb、s3c、3D Tiles等格式),设置纹理贴图、细节层次、瓦片重叠、空间参考系统等参数,设置好后进行三维模型生产.
模型生产结束后,对模型中普遍存在的问题进行精修,利用DP-Modeler软件修饰三维模型,整体修饰的内容包括:特征点较少造成模型纹理不均匀、甚至产生漏洞;部分模型纹理不均匀、模型底部出现悬浮物和扭曲、拉花等现象等.
4 实景三维模型的可视化展示与应用
图3

图4
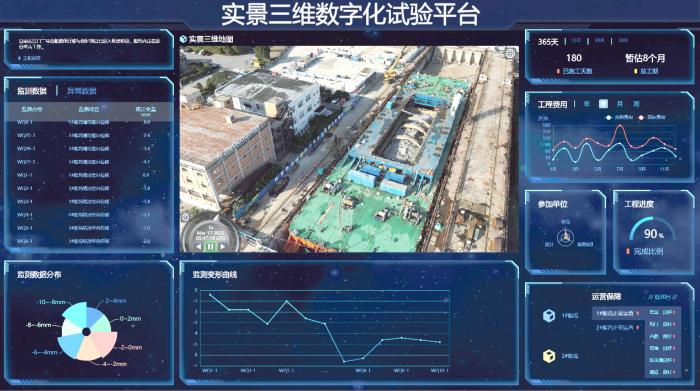
图4
“长江口二号”古船整体迁移与保护工程数字化平台
Fig.4
Digital platform for integral relocation and protection of “Yangtze River Estuary II” ancient ship
通过使用Visual Studio Code开发平台,调用Cesium提供的JS API进行定制化的二次开发,利用Cesium的三维瓦片动态调度、GPU加速、LOD等多项关键技术,在数据加载和调度上进行优化,提升了上海船厂旧址1#船坞实景三维的数据承载力和渲染性能,保证场景的流畅浏览,在空间上实现从地上到地下、从微观到宏观的实景三维数字底座的全空间展示.同时制作数据展板,显示船坞监测数据以及工程进度情况,构建工程数字化展示平台原型,可以让工程参建各方全方位了解工程建设相关信息.
5 结语
通过无人机倾斜摄影测量技术对上海船厂旧址1#船坞自身及周边环境的进行实景三维建模,利用WEB 3D GIS平台实现实景三维模型的可视化展示;同时制作数据展板,显示船坞结构监测数据以及工程进度情况,构建本项目数字化试验平台原型,为保障“长江口二号”古船整体迁移与保护项目的安全顺利推进提供了数据支撑,奠定了前期基础.后续可在考古工程数字化展示平台的全生命周期服务和船坞结构检测监测数据安全评估模型方面进行深入研究和完善.
参考文献
自然资源部办公厅关于印发《实景三维中国建设技术大纲(2021版)》的通知
[J].
Notice of the general office of the ministry of natural resources on issuing the “real 3D china construction technology outline (2021 edition)”
[J].
基于倾斜影像的三维城市自动建模
[J].
Automated three-dimensional urban modeling and accuracy evaluation using terabyte oblique aerial images
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}