无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] .
自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值.
对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨.
根据现有的文献调研,目前针对USV与AUV的编队控制研究较少,且更多的停留在数值仿真验证阶段,而在实际情况中,AUV的水下导航精度、USV与AUV的声学通讯延迟与数据有效性等,依然是亟待完善的学术和工程难题.本文的主要工作如下:
(1) 利用领航-跟随思想,对传统视线法(LOS)制导方法进行改进,引入动态自适应视线距离,使得跟随者快速靠近预定位置并消除平衡点附近的震荡,通过将编队系统转化为级联系统[31 ] ,简化了对控制器的设计.
(2) 非线性干扰观测器可用于估计未知环境力和建模不准确对动力学模型的影响.
1 问题描述
1.1 USV运动学和动力学模型
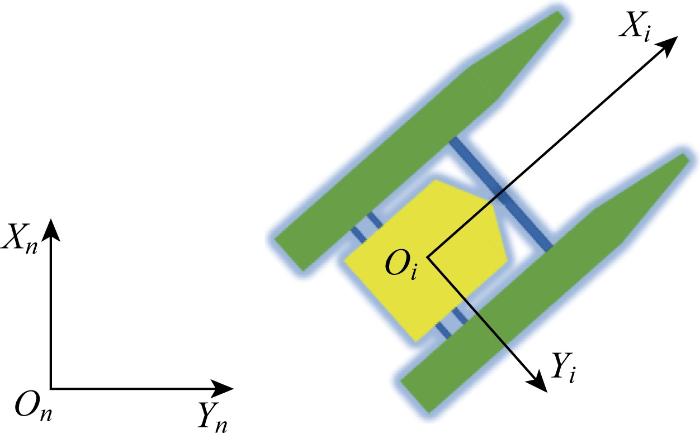
考虑USV(见图1 )纵荡、横荡和艏摇3个自由度的运动,其运动学和动力学方程[32 ] 为
(1) η · = R ( ψ ) v
(2) M v v · + C v ( v ) v + D v ( v ) v = τ i n p u t + τ e n v
式中:η = x y ψ T , v = u v r T R ( ψ )
(3) R (ψ) = c o s ψ - s i n ψ 0 s i n ψ c o s ψ 0 0 0 1
Mv 为考虑了船体附加质量的质量矩阵;Cv 为船体本身和附加质量的科里奥利向心力矩阵;Dv 为阻尼系数矩阵,通常针对低速运动的USV(速度小于或等于2 m/s)仅需考虑线性阻尼;τ env 为未知的环境外干扰力,包括风、浪、流的作用力;τ input 为USV自身推进器产生的作用力.进一步有如下公式:
M v = M R B + M A = m 0 0 0 m m x g 0 m x g I z + - X u · 0 0 0 - Y v · - Y v · 0 - Y v · - N r · = m 11 0 0 0 m 22 m 23 0 m 32 m 33
其中:下标RB表示与刚体相关的量,下标A表示与附加质量相关的量;X u · , Y v · , Y v · , N r ·
C v = C R B + C A = 0 0 - m ( x g r + v ) 0 0 m u m ( x g r + v ) - m u 0 + 0 0 Y v · v + Y r · r 0 0 - X u · u - Y v · v - Y r · r X u · u 0 = 0 0 - ( m - Y v · ) v - ( m x g - Y r · ) r 0 0 ( m - X u · ) u ( m - Y v · ) v + ( m x g - Y r · ) r - ( m - X u · ) u 0 = 0 0 - m 22 v - m 23 r 0 0 m 11 u m 22 v + m 23 r - m 11 u 0
D v (v) = - X u 0 0 0 Y v Y r 0 N v N r = d 11 0 0 0 d 22 d 23 0 d 32 d 33
图1
图1
USV坐标系定义
Fig.1
Coordinate system of USV
1.2 AUV运动学和动力学模型
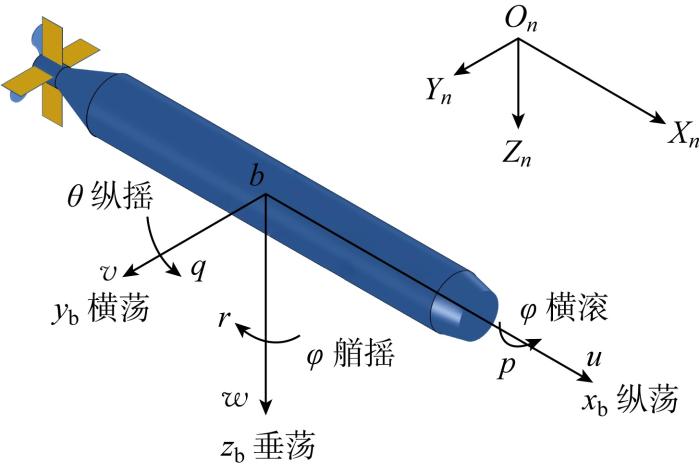
考虑鱼雷型AUV的对称关系,其六自由度运动学和动力学[33 ] 可以描述为
(4) η · = R ( η 2 ) 0 3 × 3 0 3 × 3 T ( η 2 ) v
(5) M v v · + C v ( v ) v + D v ( v ) v + g ( η ) = τ i n p u t + τ e n v
式中:η = [ η 1 η 2 ] T = x y z φ θ ψ T , η 1 x 、横荡y 、垂荡z 3个自由度的平移运动,η 2 代表横摇ϕ、纵摇θ、艏摇ψ 3个自由度的旋转运动;v = [ u v w p q r ] T 图2 所示.
图2
图2
AUV坐标系定义
Fig.2
Coordinate system of AUV
R (η 2 )= c ψ c θ - s ψ c ϕ + c ψ s φ s θ s ψ s ϕ + c ψ c φ s θ s ψ c θ c ψ c ϕ + s ψ s φ s θ - c ψ s ϕ + s ψ c φ s θ - s θ c θ s ϕ c θ c ϕ T (η 2 )= 1 s ϕ t θ c ϕ t θ 0 c ϕ - s ϕ 0 s ϕ / c θ c ϕ / c θ
为表达方便,定义:c=cos,s=sin,t=tan.
Mv =M RB +M A ,为考虑了AUV附加质量的质量矩阵,M RB 代表刚体质量矩阵,M A 代表流体作用的附加质量矩阵;Cv (v )=C RB (v )+C A (v ),为AUV本身和附加质量的科里奥利向心力矩阵;Dv =D l +D nl (v ),D l 和D nl (v )分别为线性和非线性阻尼系数矩阵;g (η )为恢复力和力矩.进一步有如下公式:
M R B = m 0 0 0 m z G 0 0 m 0 - m z G 0 0 0 0 m 0 0 0 0 - m z G 0 I x 0 - I x z m z G 0 0 0 I y 0 0 0 0 - I z x 0 I z , M A = - X u · 0 0 0 0 0 0 - Y v · 0 0 0 - Y r · 0 0 - Z w · 0 - Z q · 0 0 0 0 - K p · 0 0 0 0 - M w · 0 - M q · 0 0 - N v · 0 0 0 - N r · C R B ( v ) = 0 0 0 m ( y G q + z G r ) - m ( y G p + w ) z G - m ( z G p - v ) 0 0 0 - m ( x G q - w ) m ( z G r + x G p ) - m ( z G q + u ) 0 0 0 - m ( x G r + v ) - m ( y G r - u ) m ( x G p + y G q ) - m ( y G q + z G r ) m ( y G p + w ) m ( z G p - v ) 0 - I y z q - I x z p + I z r I y z r + I x y p - I y q m ( x G q - w ) - m ( z G r + x G p ) m ( z G q + u ) I y z q + I x z p - I z r 0 - I x z r - I x y q + I x p m ( x G r + v ) m ( y G r - u ) - m ( x G p + y G q ) - I y z r - I x y p + I y q I x z r + I x y q - I x p 0 C A (v) = 0 0 0 0 - Z w w Y v v 0 0 0 Z w w 0 - X u u 0 0 0 - Y v v X u u 0 0 - Z w w Y v v 0 - N r r M q q Z w w 0 - X u u N r r 0 - K p p - Y v v X u u 0 - M q q K p p 0 D l = - X u 0 0 0 - Y v 0 0 3 × 3 0 0 - Z w - K p 0 0 0 3 × 3 0 - M q 0 0 0 - N r D n l (v) = - X u u u 0 0 0 - Y v v v 0 0 3 × 3 0 0 - Z w w w - K p p p 0 0 0 3 × 3 0 - M q q q 0 0 0 - N r r r g ( η ) = - ( W - B ) s i n θ ( W - B ) c o s θ s i n ϕ ( W - B ) c o s θ c o s ϕ - ( y g W - y b B ) c o s θ c o s ϕ - ( z g W - z b B ) c o s θ s i n ϕ - ( z g W - z b B ) s i n θ - ( x g W - x b B ) c o s θ c o s ϕ - ( x g W - x b B ) c o s θ s i n ϕ - ( y g W - y b B ) s i n θ
1.3 控制目标
一般情况下,探测作业任务通过预先给定目标区域经纬度坐标,USV航行至目标区域布放AUV,且USV的导航性能更为优越,也可以借助超短基线(USBL)等声学设备辅助AUV导航,因而考虑USV为领航者,其物理量下标用l表示,AUV为跟随者,其物理量下标用f表示.在USV局部坐标系下,AUV的坐标可以表示为
η l - f = [ x l - f y l - f z l - f ϕ l - f θ l - f ψ l - f ] T
不考虑纵摇、横摇,则该相对坐标与大地坐标系下USV与AUV的位置转换关系为
(6) x l - f = ( x f - x l ) c o s ψ l + ( y f - y l ) s i n ψ l y l - f = - ( x f - x l ) s i n ψ l + ( y f - y l ) c o s ψ l z l - f = z f ψ l - f = ψ f - ψ l
定义F l - f = [ x l - f y l - f z l - f ] T , 定 义 预 定 的 编 队 队 形 D l - f = [ D l - f x D l - f y D l - f z ] T ,
(7) l i m t → ∞ F l - f = D l - f
一般地,同一作业任务内,AUV为定深作业,D l - f x 、 D l - f y 、 D l - f z
2 编队控制策略设计
2.1 改进的制导律设计
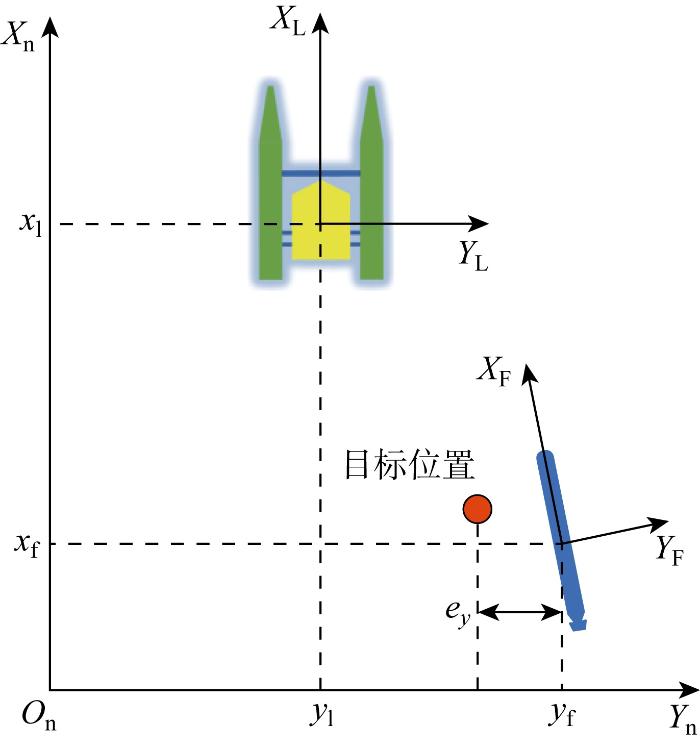
对于欠驱动无人航行器的编队控制问题,可以使用视线法(LOS)进行制导律设计.将USV与AUV的位置投影在x -y 平面内,如图3 所示.
图3
图3
USV-AUV编队位置构型
Fig.3
Formation structure of USV-AUV
定义编队控制横向误差e y = y l - f - D l - f y , ψ d f = ψ l - a r c t a n e y Δ f . Δ f Δ f
(8) Δ f = Δ 0 1 + 2 a π a r c t a n e y L y
(9) ψ d f = ψ l - a r c t a n e y Δ 0 1 + 2 a π a r c t a n e y L y
定义Δ ψ = - a r c t a n e y Δ 0 1 + 2 a π a r c t a n e y L y . e x = x l - f - D l - f x ,
(10) u c = u l - 2 b π a r c t a n e x L x
式中:b 、 L x u l 为领航USV速度;2 b π a r c t a n e x L x
2.2 控制器设计
设计控制输出,使得AUV的纵荡速度和航向角满足制导律式(9)~(10).将式(5)展开得到AUV在x -y 平面内的动力学方程:
(11) m [ u · - v r + w q - x g ( q 2 + r 2 ) + z g ( p r + q · ) ] = ∑ X e x t m [ v · - w p + u r + z g ( q r - p · ) + x g ( q p + r · ) ] = ∑ Y e x t I z z r · + ( I y y - I x x ) p q + m [ x g ( v · - w p + u r ) ] = ∑ N e x t
式中:∑X ext 、∑Y ext 、∑N ext 为AUV在对应方向上的外力及外力矩,其中包含了控制力.为叙述方便将式(11)简化为
(12) m u · + F X ( u , v , w , p , q , r ) = τ i n p u t _ u + τ e n v _ x m v · + F Y ( u , v , w , p , q , r ) = τ i n p u t _ v + τ e n v _ y I z z r · + F N ( u , v , w , p , q , r ) = τ i n p u t _ r + τ e n v _ r
利用反馈线性化和反步法[16 ] ,设计跟随AUV的纵荡方向控制推力如下:
(13) τ u = - F X ( u , v , w , p , q , r ) - τ ^ e n v _ x + u · c - k u ( u l - u c )
式中:k u > 0 为 控 制 参 数 ; F X ( u , v , w , p , q , r )
(14) τ r = - F N ( u , v , w , p , q , r ) - τ ^ e n v _ r + ψ ¨ f - k ψ ( ψ f - ψ d f ) - k r ( r f - ψ · f )
式中:k ψ , k r > 0 τ ^ e n v _ r
2.3 非线性干扰观测器
在实际应用中,航行器(USV或AUV)所受环境力影响复杂、建模误差等影响,对其动力学描述不能真实还原其实际状态,所以需要设计观测器对不可预见的风、浪、流以及航行器水动力建模误差、控制输出执行误差等进行在线估计,本文利用滑模控制思想,设计非线性干扰观测器[34 ] .引入误差变量
(15) Z = v - χ
式中:v 为航行器的速度;χ 为引入的观测器系统的动力学变量,其量纲与速度一致.设计χ 的动力学系统为
(16) χ · = M - 1 [ K z 1 Z + K z 2 s g n ( Z ) - C (v) v - D v (v) v + τ i n p u t ]
式中:χ · K z 1 , K z 2
(17) τ ^ e n v = K z 1 Z + K z 2 s g n ( Z )
定义误差变量e e n v = τ ^ e n v - τ e n v .
(18) V Z = 1 2 Z T M Z
(19) V · Z = Z T M Z ·
(20) V · Z = Z T [ M v · - M χ · ] = Z T { - C (v) v - D v (v) v + τ i n p u t + τ e n v - [ K z 1 Z + K z 2 s g n ( Z ) - C (v) v - D v (v) v + τ i n p u t ] } = Z T [ - K z 1 Z - K z 2 s g n ( Z ) + τ e n v ]
假设1 环境力τ e n v m a x ≤ ρ e n v , ρ e n v ;
假设2 参数矩阵λ m i n K z 2 ≥ ρ e n v , K z 2 ρ e n v .
(21) V · Z ≤ - K z 1 Z 2 - K z 2 Z + ρ e n v Z ≤ - K z 1 Z 2
由文献[34 ]可知,Z 系统指数稳定.对于误差变量e env ,有:
(22) e e n v = τ ^ e n v - τ e n v = [ K z 1 Z + K z 2 s g n ( Z ) ] - [ M v · + C ( v ) v + D v ( v ) v - τ i n p u t ] = - M { v · - M - 1 [ K z 1 Z + K z 2 s g n ( Z ) - C ( v ) v - D v ( v ) v + τ i n p u t ] } = - M Z ·
3 控制器稳定性分析
利用,对编队横向误差e y u ~ = u f - u c , ψ ~ = ψ f - ψ d f , r ~ = r f - ψ · d f ,
(23) e · y = ( u c + u ~ ) s i n ( Δ ψ + ψ ~ ) + v f c o s ( Δ ψ + ψ ~ ) - v l
(24) e · y = - u c e y e y 2 + Δ f 2 + v f Δ f e y 2 + Δ f 2 - v l
(25) V 1 ( e y , v - j ) = 1 2 e y 2 + κ 2 ( v f 2 - v l 2 )
(26) V · 1 = e e · + κ ( v f v · f - v l v · l ) = - u c e y 2 + Δ f 2 e y 2 + Δ f v f e y 2 + Δ f 2 e y + κ F X v f e y 2 + Δ f 2 Δ f e y 2 + Δ f 2 u c - Δ · f e y - κ X Δ f e y 2 + Δ f 2 v f 2 + κ F Y v f 2
考虑e y e y 2 + Δ f 2 U m i n ≤ u c ≤ U m a x , Δ · f ≤ K m a x , F X ≤ X m a x , F Y ≤ - Y m i n ,
(27) V · 1 ≤ - U m i n Δ f z 2 + Δ f v f + κ X m a x U m a x Δ f + K m a x v f z + κ X m a x Δ f - κ Y m i n v f 2
不等式右边为二次多项式,其极值取在Δ f v f + κ X m a x U m a x Δ f + K m a x v f - 2 U m i n Δ f ,
V · 1 ≤ { 4 U m i n Δ f ( κ X m a x Δ f - κ Y m i n ) v f 2 - [ Δ f v f + κ X m a x ( U m a x Δ f + K m a x ) v f ] 2 } / ( - 4 U m i n Δ f )
κ = Δ f 2 2 U m i n ( Δ f Y m i n - X m a x ) X m a x 2 ( U m a x + K m a x Δ f ) 2 - Δ f 2 X m a x ( U m a x + K m a x Δ f )
(28) V · 1 ≤ - U m i n κ ( X m a x - Δ f Y m i n ) v f 2 U m i n Δ f
当Δ f ≥ X m a x U m a x + 2 U m i n X m a x ( 2 U m i n Y m i n - K m a x X m a x ) , K m a x ≤ 2 U m i n Y m i n X m a x 时 , 有 κ ≥ 0 , 则 V · 1 ≤ 0 ,
对编队纵荡方向误差e x 求 导 , 并 用 与 e y
(29) e · x = u c c o s ( Δ ψ + ψ ~ ) - v f s i n ( Δ ψ + ψ ~ ) + c o s ( Δ ψ + ψ ~ ) u ~ - u
(30) V 2 ( e x ) = e x 2 / 2
(31) V · 2 = Δ f e y 2 + Δ f 2 - 1 u e x - k u 2 b π a r c t a n e x L x e x
式中:Δ f / e y 2 + Δ f 2 - 1 < 0 . 选 取 L x > e x m a x ,
- k x 2 b π a r c t a n e x L x e x < - k x 2 L x e x 2 ≤ 0
至此证明了标称系统{ e y , v - j , e x } 31 ]中假设1,实际系统方程可以写为
(32) e · y v · f - v · l e · x = u c s i n Δ ψ + v f c o s Δ ψ - v l F Y ( v f - v l ) u c c o s Δ ψ - v f s i n Δ ψ - u l + A 1 A 2 A 3 u ~ ψ ~ r ~
A T 1 = s Δ ψ c ψ ~ + c Δ ψ s ψ ~ ( u c s Δ ψ + v - j c Δ ψ ) c ψ ~ - 1 ψ ~ + ( u c c Δ ψ - v - j s Δ ψ ) s ψ ~ ψ ~ 0 A T 2 = X ( u c + u ~ ) - X ( u ) u ~ r j + Y ( u c + u ~ ) - Y ( u ) u ~ v - j 0 X ( u + u ~ ) A T 3 = c Δ ψ c ψ ~ - s Δ ψ s ψ ~ ( u c c Δ ψ - v - j s Δ ψ ) c ψ ~ - 1 ψ ~ + ( u c s Δ ψ - v - j c Δ ψ ) s ψ ~ ψ ~ 0
式中:c=cos; s=sin; c o s ψ ~ - 1 ψ ~ , sin ψ ~ ψ ~ , X u c + u ~ - X u u ~ 和 Y u c + u ~ - Y u u ~ θ 1 和 θ 2
A 1 A 2 A 3 u ~ ψ ~ r ~ ≤ θ 1 u ~ ψ ~ r ~ ( e y + v - j - v - i + e x ) + θ 2 u ~ ψ ~ r ~
(33) ξ · = - k u 0 0 0 0 1 0 - k ψ - k r ξ = A 4 ξ
容易看出矩阵A 4 为Hurwitz,这说明误差系统u ~ , ψ ~ , r ~ 31 ]中引理假设3.至此,文献[31 ]中的3个假设均被满足,说明USV-AUV编队误差系统在所设计的控制器作用下是一致全局渐进收敛的.
4 试验结果与分析
为验证所提控制策略的有效性,进行了USV-AUV编队航行湖上试验.参试航行器如图4 和图5 所示.试验USV借鉴文献[28 ]中船型,长4.8 m,宽2.4 m,质量550 kg,船艉搭载2台自制全回转推进器;试验AUV长1.85 m,直径180 mm,采用十字舵,且配备2对槽道桨;USV搭载差分GPS、惯导等,AUV搭载多普勒计程仪、惯导、深度计等,二者分别搭载超短基线基站与信标进行水声通信.
图4
图4
USV湖试照片
Fig.4
USV in lake test
图5
图5
AUV湖试照片
Fig.5
AUV in lake test
设计编队队形D l-f =[-100 -4]T m,领航USV直线航行300 m并折返回原点,设计航速1.5 m/s,USV初始位置[0 0 0]T m,AVU初始位置[-20 10 0]T m.
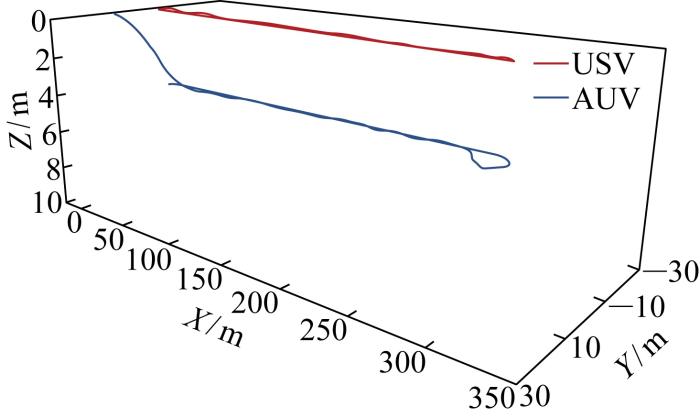
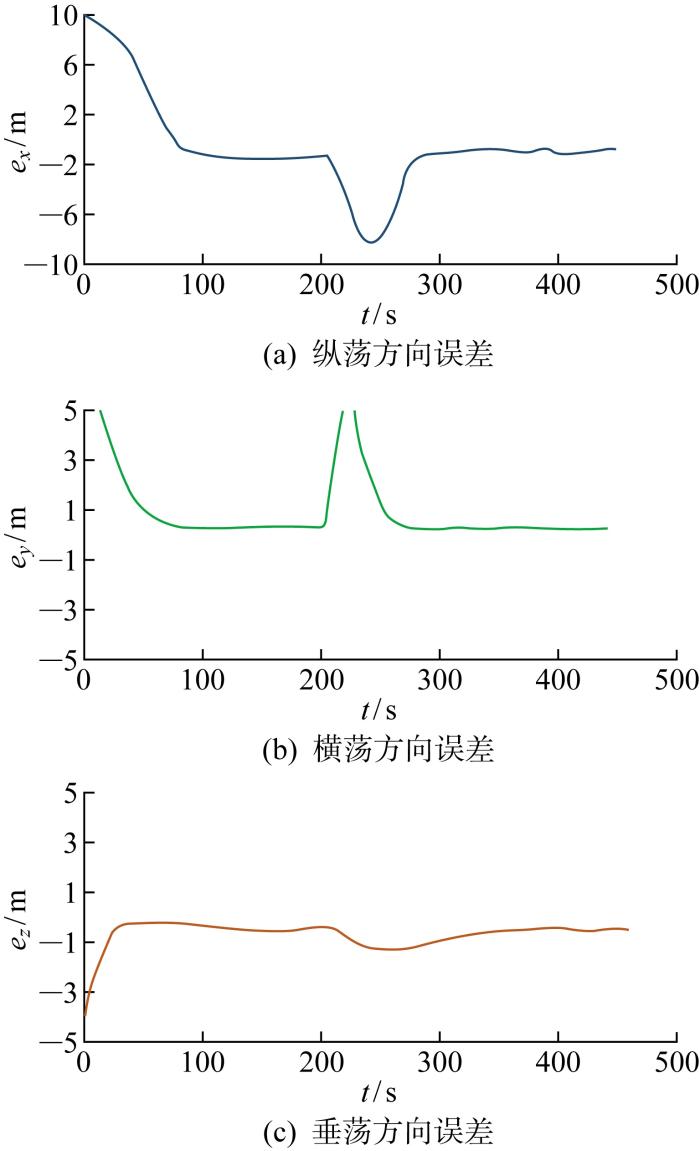
试验轨迹如图6 所示.试验开始后,AUV在下潜的同时,靠近USV航行,大概在X 方向50 m处达到编队队形要求,后续航行可以平稳精准的进行编队保持,折返点处AUV进行了预先处理,而后继续进行编队跟踪.误差轨迹如图7 所示,其中纵向误差未能良好收敛至0,但稳定在一定范围内,原因在于水声通信的延迟、丢包导致AUV对USV的位置估计不准确、不及时;横向误差较小,收敛小且无震荡现象,有效的证明了提出的改进制导律;垂向误差即为定深控制,误差在允许范围内,但在折返处存在一定扰动,这是由于低速转弯及槽道桨等因素导致;在200 s左右,USV折返,此时相对坐标系快速旋转,导致误差增大,当AUV随之折返后,又继续进行了编队跟踪控制,误差收敛.试验误差均满足要求,证实了USV-AUV编队控制策略的有效性,也说明了其具有实际应用价值.
图6
图6
USV-AUV编队航行轨迹
Fig.6
Trajectory of USV-AUV formation
图7
图7
AUV航行编队误差
Fig.7
Formation tracking error of AUV
5 结论
本文针对USV-AUV编队控制问题,基于领航-跟随思想,从制导、控制层面设计了编队控制器,并结合滑模控制思想设计非线性干扰观测器,实现了估计未知环境力和建模误差对动力学的影响.改进的LOS制导律简化了控制层面的设计,也使得误差系统快速收敛并消除了平衡点震荡.湖上试验结果表明:本文所提的方法可以实现有限时间快速收敛至编队队形,并稳定保持,具有一定的实际应用价值.未来拟考虑USV携带AUV搭载探测载荷,对二者协同探查展开研究.
参考文献
View Option
[13]
YAN X JIANG D MIAO R et al Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field
[J]. Journal of Marine Science and Engineering , 2021 , 9 (2 ): 161 -178 .
DOI:10.3390/jmse9020161
URL
[本文引用: 1]
[14]
PARK B S YOO S J Connectivity-maintaining and collision-avoiding performance function approach for robust leader-follower formation control of multiple uncertain underactuated surface vessels
[J]. Automatica , 2021 , 127 : 109501 .
DOI:10.1016/j.automatica.2021.109501
URL
[本文引用: 2]
[15]
EDWARDS D B BEAN T A ODELL D L et al A leader-follower algorithm for multiple AUV formations
[C]// 2004 IEEE/OES Autonomous Underwater Vehicles (IEEE Cat. No. 04CH37578). Sebasco, ME, USA: IEEE , 2004 : 40 -46 .
[本文引用: 1]
[16]
ROUT R SUBUDHI B A backstepping approach for the formation control of multiple autonomous underwater vehicles using a leader-follower strategy
[J]. Journal of Marine Engineering & Technology , 2016 , 15 (1 ): 38 -46 .
[本文引用: 2]
[18]
庞师坤 , 王健 , 易宏 , 等 . 基于传感探测系统的多自治水下机器人编队协调控制
[J]. 上海交通大学学报 , 2019 , 53 (5 ): 549 -555 .
[本文引用: 1]
PANG Shikun WANG Jian YI Hong et al Formation control of multiple autonomous underwater vehicles based on sensor measuring system
[J]. Journal of Shanghai Jiao Tong University , 2019 , 53 (5 ): 549 -555 .
[本文引用: 1]
[19]
ZHUANG Y HAN X HUANG H et al Dynamic area coverage with multi-USV in fully connected state using graph theory
[C]// 2021 China Automation Congress (CAC) . Beijing, China : IEEE , 2021 : 7376 -7382 .
[本文引用: 1]
[20]
VANNI F AGUIAR A P PASCOAL A Nonlinear motion control of multiple autonomous underwater vehicles
[J]. IFAC Proceedings Volumes , 2007 , 40 (17 ): 75 -80 .
[本文引用: 1]
[22]
SOARES J M AGUIAR A P PASCOAL A M et al Joint ASV/AUV range-based formation control: Theory and experimental results
[C]// 2013 IEEE International Conference on Robotics and Automation. Karlsruhe , Germany : IEEE , 2013 : 5579 -5585 .
[本文引用: 1]
[23]
李娟 , 袁锐锟 , 张宏瀚 . 基于领航跟随法的多 AUV 编队控制算法研究
[J]. 仪器仪表学报 , 2022 , 40 (6 ): 237 -246 .
[本文引用: 1]
LI Juan YUAN Ruikun ZHANG Honghan Research on multiple AUVs formation control algorithm based on leader-follower method
[J]. Chinese Journal of Scientific Instrument , 2022 , 40 (6 ): 237 -246 .
[本文引用: 1]
[24]
徐博 , 王朝阳 . 基于无人艇跨域异构编队协同导航研究进展与未来趋势
[J]. 中国舰船研究 , 2022 , 17 (4 ): 1 -11 .
[本文引用: 1]
XU Bo WANG Zhaoyang Cooperative navigation of cross-domain heterogeneous unmanned ship formation: recent advances and future trends
[J]. Chinese Journal of Ship Research , 2022 , 17 (4 ): 1 -11 .
[本文引用: 1]
[25]
MCGILLIVARY P DE SOUSA J B MARTINS R et al Integrating autonomous underwater vessels, surface vessels and aircraft as persistent surveillance components of ocean observing studies
[C]// 2012 IEEE/OES Autonomous Underwater Vehicles (AUV). Southampton , UK : IEEE , 2012 : 1 -5 .
[本文引用: 1]
[26]
NORGREN P LUDVIGSEN M INGEBRETSEN T et al Tracking and remote monitoring of an autonomous underwater vehicle using an unmanned surface vehicle in the Trondheim Fjord
[C]// OCEANS 2015-MTS/IEEE Washington. Washington D.C. , USA : IEEE , 2015 : 1 -6 .
[本文引用: 1]
[27]
JIA Z LU H LI S et al Distributed dynamic rendezvous control of the AUV-USV joint system with practical disturbance compensations using model predictive control
[J]. Ocean Engineering , 2022 , 258 : 111268 .
DOI:10.1016/j.oceaneng.2022.111268
URL
[本文引用: 1]
[28]
SARDA E I DHANAK M R Launch and recovery of an autonomous underwater vehicle from a station-keeping unmanned surface vehicle
[J]. IEEE Journal of Oceanic Engineering , 2018 , 44 (2 ): 290 -299 .
DOI:10.1109/JOE.48
URL
[本文引用: 2]
[29]
LI J ZHANG G LI B Robust adaptive neural cooperative control for the USV-UAV based on the LVS-LVA guidance principle
[J]. Journal of Marine Science and Engineering , 2022 , 10 (1 ): 51 -70 .
DOI:10.3390/jmse10010051
URL
[本文引用: 1]
[30]
CHO H JEONG S K JI D H et al Study on control system of integrated unmanned surface vehicle and underwater vehicle
[J]. Sensors , 2020 , 20 (9 ): 2633 -2655 .
DOI:10.3390/s20092633
URL
[本文引用: 1]
[32]
FOSSEN T I Handbook of marine craft hydrodynamics and motion control
[M]. Trondheim , Norway : John Wiley & Sons , 2011 .
[本文引用: 1]
[33]
PRESTERO T T J Verification of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle [D]. Commonwealth of Massachusetts , USA : Massachusetts Institute of Technology , 2001 .
[本文引用: 1]
[34]
KHALIL H K Nonlinear systems
[M]. 3rd ed. Upper Saddle River, New Jersey , USA : Prentice Hall , 2002 .
[本文引用: 2]
[1]
TSIOGKAS N PAPADIMITRIOU G SAIGOL Z et al Efficient multi-AUV cooperation using semantic knowledge representation for underwater archaeology missions
[C]// 2014 Oceans-St. John’s. St. John’s , USA : IEEE , 2014 : 1 -6 .
[本文引用: 1]
[2]
MAHMOUDZADEH S ABBASI A YAZDANI A et al Uninterrupted path planning system for multi-USV sampling mission in a cluttered ocean environment
[J]. Ocean Engineering , 2022 , 254 : 111328 .
DOI:10.1016/j.oceaneng.2022.111328
URL
[本文引用: 1]
[3]
MAHACEK P KITTS C A MAS I Dynamic guarding of marine assets through cluster control of automated surface vessel fleets
[J]. IEEE/ASME Transactions on Mechatronics , 2011 , 17 (1 ): 65 -75 .
DOI:10.1109/TMECH.2011.2174376
URL
[本文引用: 1]
[4]
MINA T SINGH Y MIN B C Maneuvering ability-based weighted potential field framework for multi-USV navigation, guidance, and control
[J]. Marine Technology Society Journal , 2020 , 54 (4 ): 40 -58 .
DOI:10.4031/MTSJ.54.4.6
URL
[本文引用: 1]
[5]
NIU H JI Z LIGUORI P et al Design, integration and sea trials of 3D printed unmanned aerial vehicle and unmanned surface vehicle for cooperative missions
[C]// 2021 IEEE/SICE International Symposium on System Integration (SII). Iwaki, Fukushima , Japan : IEEE , 2021 : 590 -591 .
[本文引用: 1]
[6]
LACHAUD E MONBEIG Y NOLLEAU P et al Opportunities and challenges of remote operating a ROV embarked on a USV
[C]// Offshore Technology Conference. Houston, Texas , USA : OnePetro , 2018 .
[本文引用: 2]
[8]
ZWOLAK K WIGLEY R BOHAN A et al The autonomous underwater vehicle integrated with the unmanned surface vessel mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE
[J]. Remote Sensing , 2020 , 12 (8 ): 1344 -1370 .
DOI:10.3390/rs12081344
URL
[本文引用: 1]
[9]
任章 , 郭栋 , 董希旺 , 等 . 飞行器集群协同制导控制方法及应用研究
[J]. 导航定位与授时 , 2019 , 6 (5 ): 1 -9 .
[本文引用: 1]
REN Zhang GUO Dong DONG Xiwang et al Research on the Ccooperative guidance and control method and application for aerial vehicle swarm systems
[J]. Navigation Positioning and Timing , 2019 , 6 (5 ): 1 -9 .
[本文引用: 1]
[10]
NANTOGMA S RAN W YANG X et al Behavior-based genetic fuzzy control system for multiple USVs cooperative target protection
[C]// 2019 3rd International Symposium on Autonomous Systems (ISAS). Shanghai , China : IEEE , 2019 : 181 -186 .
[本文引用: 1]
[11]
XU B ZHANG J WANG C A real-time obstacle avoidance method for multi-AUV cluster based on artificial potential field
[J]. Chinese Journal of Ship Research , 2018 , 13 (6 ): 66 -71 .
[本文引用: 1]
Adaptive coordinated tracking control of multiple autonomous underwater vehicles
1
2014
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field
1
2021
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
Connectivity-maintaining and collision-avoiding performance function approach for robust leader-follower formation control of multiple uncertain underactuated surface vessels
2
2021
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
... [14 ]利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
A leader-follower algorithm for multiple AUV formations
1
2004
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
A backstepping approach for the formation control of multiple autonomous underwater vehicles using a leader-follower strategy
2
2016
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
... 利用反馈线性化和反步法[16 ] ,设计跟随AUV的纵荡方向控制推力如下: ...
Leader-follower formation control of underactuated autonomous underwater vehicles
1
2010
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
基于传感探测系统的多自治水下机器人编队协调控制
1
2019
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
基于传感探测系统的多自治水下机器人编队协调控制
1
2019
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
Dynamic area coverage with multi-USV in fully connected state using graph theory
1
2021
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
Nonlinear motion control of multiple autonomous underwater vehicles
1
2007
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
Leader-follower formation control of underactuated autonomous marine surface vehicles with limited torque
1
2015
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
Joint ASV/AUV range-based formation control: Theory and experimental results
1
2013
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
基于领航跟随法的多 AUV 编队控制算法研究
1
2022
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
基于领航跟随法的多 AUV 编队控制算法研究
1
2022
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
基于无人艇跨域异构编队协同导航研究进展与未来趋势
1
2022
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
基于无人艇跨域异构编队协同导航研究进展与未来趋势
1
2022
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
Integrating autonomous underwater vessels, surface vessels and aircraft as persistent surveillance components of ocean observing studies
1
2012
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
Tracking and remote monitoring of an autonomous underwater vehicle using an unmanned surface vehicle in the Trondheim Fjord
1
2015
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
Distributed dynamic rendezvous control of the AUV-USV joint system with practical disturbance compensations using model predictive control
1
2022
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
Launch and recovery of an autonomous underwater vehicle from a station-keeping unmanned surface vehicle
2
2018
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
... 为验证所提控制策略的有效性,进行了USV-AUV编队航行湖上试验.参试航行器如图4 和图5 所示.试验USV借鉴文献[28 ]中船型,长4.8 m,宽2.4 m,质量550 kg,船艉搭载2台自制全回转推进器;试验AUV长1.85 m,直径180 mm,采用十字舵,且配备2对槽道桨;USV搭载差分GPS、惯导等,AUV搭载多普勒计程仪、惯导、深度计等,二者分别搭载超短基线基站与信标进行水声通信. ...
Robust adaptive neural cooperative control for the USV-UAV based on the LVS-LVA guidance principle
1
2022
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
Study on control system of integrated unmanned surface vehicle and underwater vehicle
1
2020
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
On global uniform asymptotic stability of nonlinear time-varying systems in cascade
6
1998
... (1) 利用领航-跟随思想,对传统视线法(LOS)制导方法进行改进,引入动态自适应视线距离,使得跟随者快速靠近预定位置并消除平衡点附近的震荡,通过将编队系统转化为级联系统[31 ] ,简化了对控制器的设计. ...
... 将其视为级联系统[31 ] ,其标称系统为 ...
... 至此证明了标称系统 { e y , v - j , e x } 31 ]中假设1,实际系统方程可以写为 ...
... 满足文献[31 ]中假设2. ...
... 容易看出矩阵A 4 为Hurwitz,这说明误差系统 u ~ , ψ ~ , r ~ 31 ]中引理假设3.至此,文献[31 ]中的3个假设均被满足,说明USV-AUV编队误差系统在所设计的控制器作用下是一致全局渐进收敛的. ...
... ]中引理假设3.至此,文献[31 ]中的3个假设均被满足,说明USV-AUV编队误差系统在所设计的控制器作用下是一致全局渐进收敛的. ...
Handbook of marine craft hydrodynamics and motion control
1
2011
... 考虑USV(见图1 )纵荡、横荡和艏摇3个自由度的运动,其运动学和动力学方程[32 ] 为 ...
1
2001
... 考虑鱼雷型AUV的对称关系,其六自由度运动学和动力学[33 ] 可以描述为 ...
Nonlinear systems
2
2002
... 在实际应用中,航行器(USV或AUV)所受环境力影响复杂、建模误差等影响,对其动力学描述不能真实还原其实际状态,所以需要设计观测器对不可预见的风、浪、流以及航行器水动力建模误差、控制输出执行误差等进行在线估计,本文利用滑模控制思想,设计非线性干扰观测器[34 ] .引入误差变量 ...
... 由文献[34 ]可知,Z 系统指数稳定.对于误差变量e env ,有: ...
Efficient multi-AUV cooperation using semantic knowledge representation for underwater archaeology missions
1
2014
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
Uninterrupted path planning system for multi-USV sampling mission in a cluttered ocean environment
1
2022
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
Dynamic guarding of marine assets through cluster control of automated surface vessel fleets
1
2011
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
Maneuvering ability-based weighted potential field framework for multi-USV navigation, guidance, and control
1
2020
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
Design, integration and sea trials of 3D printed unmanned aerial vehicle and unmanned surface vehicle for cooperative missions
1
2021
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
Opportunities and challenges of remote operating a ROV embarked on a USV
2
2018
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
Operability analysis of control system for ROV launch-and-recovery from autonomous surface vessel
2
2023
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
... 对于异构航行器编队控制,由于航行器的模型不同、应用场景不同、控制方式不同,以及跨域作业导致的通信延迟、数据交互有限等,给问题的解决带来了更多挑战.徐博等[24 ] 分析了USV作为通信基站的搭载平台,并以USV为中心拓展跨域异构编队的作业优势及应用前景,并对国内外已开展的USV-UAV(无人机)、USV-AUV、UAV-UGV等相关研究进行了调研讨论;McGillivary等[25 ] 利用AUV、USV和UAV组成海洋观测系统(OOS),并于近岛海域对无人载具间的通信和数据传输进行了测试;Norgen等[26 ] 进行了USV-AUV对某坠落飞机实时探测的演示验证,作者认为探测作业中USV对AUV的跟踪控制是重要的环节,并提出了利用跟随速度和固定方位制导律对估计AUV位置进行跟踪,海试结果表明该策略的有效性;Jia等[27 ] 针对AUV的再充电和数据传输作业需求,探讨了USV-AUV系统的集结控制问题,提出了基于非线性模型预测控制的解决办法,并利用仿真验证其有效性;除以上研究之外,另有学者针对USV对AUV、ROV的回收布放系统[7 ,28 ] 、USV对UAV的回收控制[29 ] 、USV与有缆ROV协同作业[6 ,30 ] 等展开了探讨. ...
The autonomous underwater vehicle integrated with the unmanned surface vessel mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE
1
2020
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
飞行器集群协同制导控制方法及应用研究
1
2019
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
飞行器集群协同制导控制方法及应用研究
1
2019
... 无人航行器以其独特的优势在水域探测、海洋科考、救援打捞等领域发挥着重要作用[1 ⇓ ⇓ -4 ] .随着人类对海洋的科学探索和经济活动日益频繁,单一类型的无人航行器由于自身局限性难以满足复杂任务需求,因此,跨介质无人航行器协同作业成为越来越多学者关注的焦点[5 ⇓ ⇓ -8 ] .水面无人船(USV)与自主水下航行器(AUV)构成的跨介质异构无人载具协同,通过充分利用不同载具之间在功能、携带载荷、适用范围之间差异与互补,可以提高整体探测效能.其中,编队控制是多智能体协同控制的重要研究分支之一[9 ] . ...
Behavior-based genetic fuzzy control system for multiple USVs cooperative target protection
1
2019
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...
A real-time obstacle avoidance method for multi-AUV cluster based on artificial potential field
1
2018
... 自主水面、水下无人航行器的编队航行问题在学术界有着广泛的研究,解决办法主要围绕基于行为法[10 ] 、人工势场法[11 ] 、虚拟结构法[12 -13 ] 、领航-跟随法[14 ⇓ ⇓ ⇓ -18 ] 、基于图论法[19 -20 ] 等.在前述的文献中,学者所探讨的对象聚焦于同构无人航行器,其中,Park等[14 ] 利用领航-跟随的思想针对USV自动避碰编队航行进行了研究,并探讨了欠驱动无人船与差速驱动轮式机器人的区别,在考虑了USV之间有限数据通信的情况下,设计考虑了避碰动作的鲁棒编队控制器;Shojaei[21 ] 构建了一种二阶领航-跟随编队模型来简化编队控制问题,在设计控制器层面考虑了避免推力饱和情况,具有一定的实际意义,同时利用神经网络和自适应控制器抵消未建模误差和环境干扰;Soares等[22 ] 对MEDUSA AMV三角编队航行进行了实际海上测试,考虑航行器彼此间依靠声学信息测量距离标量更为容易的实际情况,设计了基于距离的编队控制策略,并把其分解为速度控制器和艏向控制器,在有传感器噪声、通信丢包等影响下,试验依然表现出良好的效果;李娟等[23 ] 针对已知路径的AUV编队,提出了一种路径跟踪控制和编队协调控制相结合的新型编队控制器,并通过仿真试验和3台AUV湖上试验证明了该控制策略的有效性和实际应用价值. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}