基于非线性干扰观测器的无人船与自主水下航行器协同运动控制策略
USV and AUV Cooperative Control Strategy Based on Nonlinear Disturbance Observer
基于非线性干扰观测器的无人船与自主水下航行器协同运动控制策略 |
| 于特, 刘佳鹏, 吴超, 周畅, 周胜增, 王磊 |
|
USV and AUV Cooperative Control Strategy Based on Nonlinear Disturbance Observer |
| YU Te, LIU Jiapeng, WU Chao, ZHOU Chang, ZHOU Shengzeng, WANG Lei |
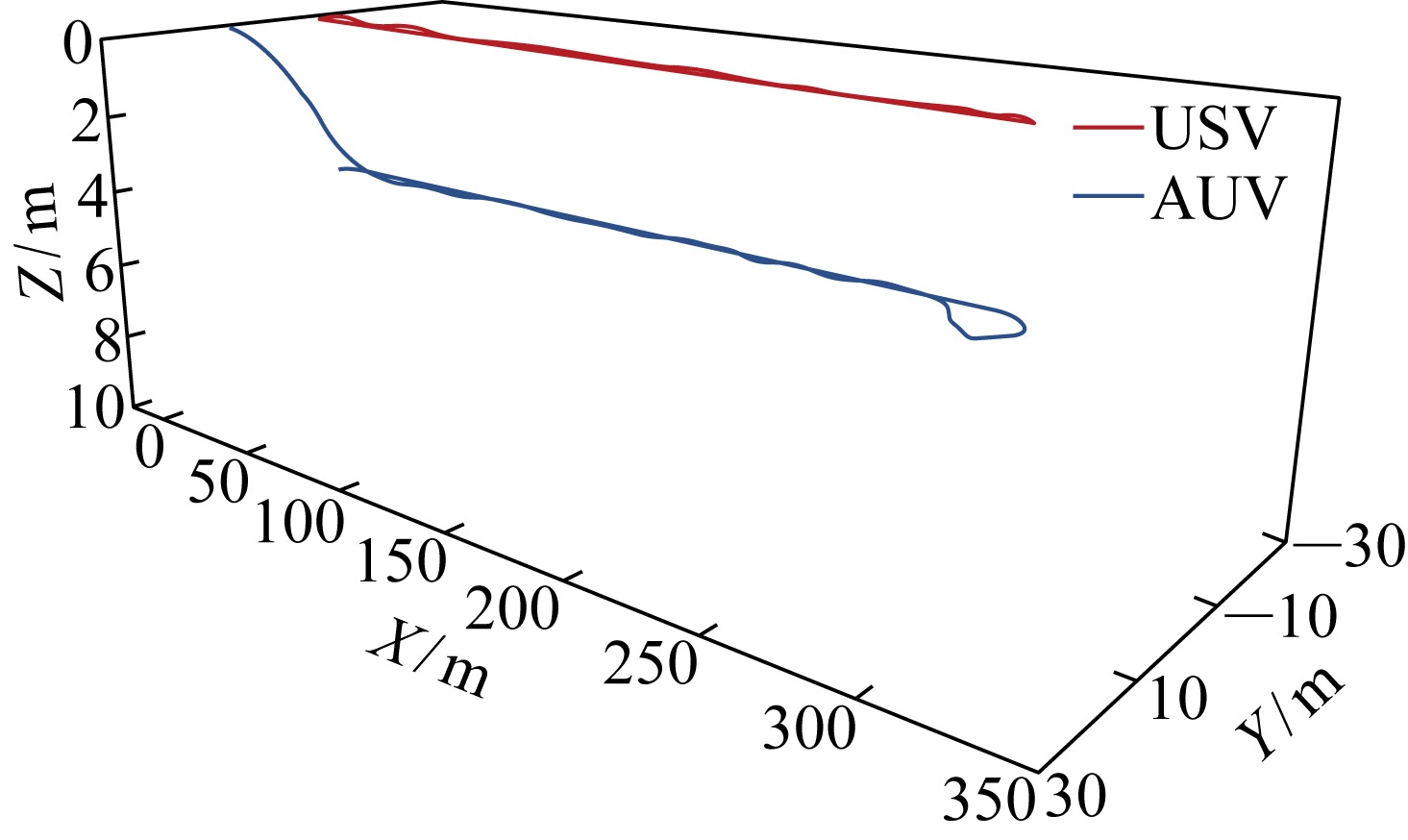
| 图6 USV-AUV编队航行轨迹 |
| Fig.6 Trajectory of USV-AUV formation |
|
|