Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (8): 1231-1239.doi: 10.16183/j.cnki.jsjtu.2022.469
• Mechanical Engineering • Previous Articles Next Articles
ZHAO Wei, YUAN Shaoke, LI Yinan, FEI Yanqiong( )
)
Received:2022-11-21
Revised:2023-01-12
Accepted:2023-03-03
Online:2024-08-28
Published:2024-08-27
CLC Number:
ZHAO Wei, YUAN Shaoke, LI Yinan, FEI Yanqiong. Design and Motion Analysis of Bionic Jaw Mechanism for Humanoid Expression Robot[J]. Journal of Shanghai Jiao Tong University, 2024, 58(8): 1231-1239.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.469
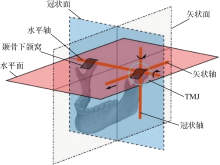
Fig.1
Reference axes and motion reference planes of human jaw movement
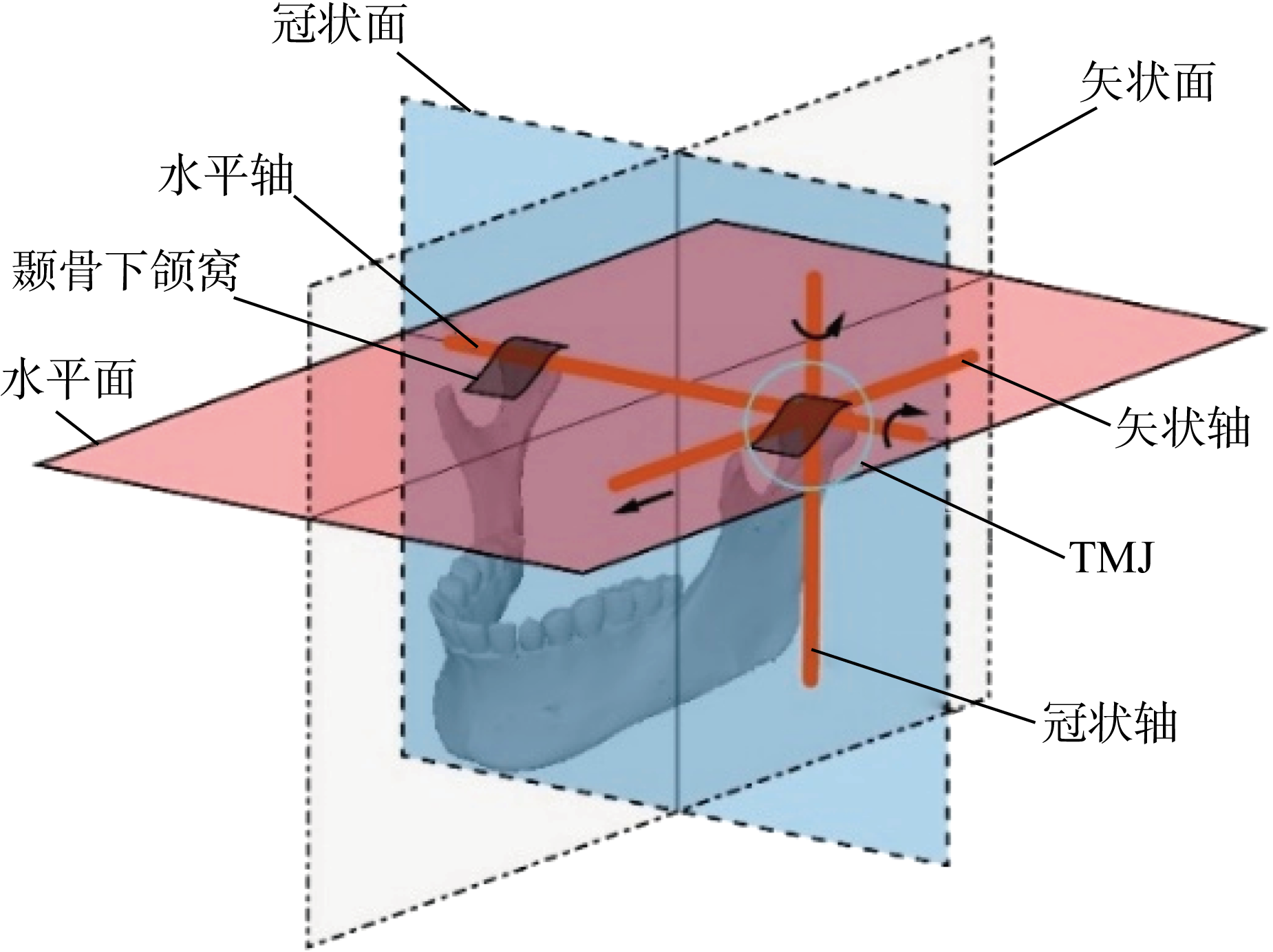
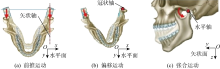
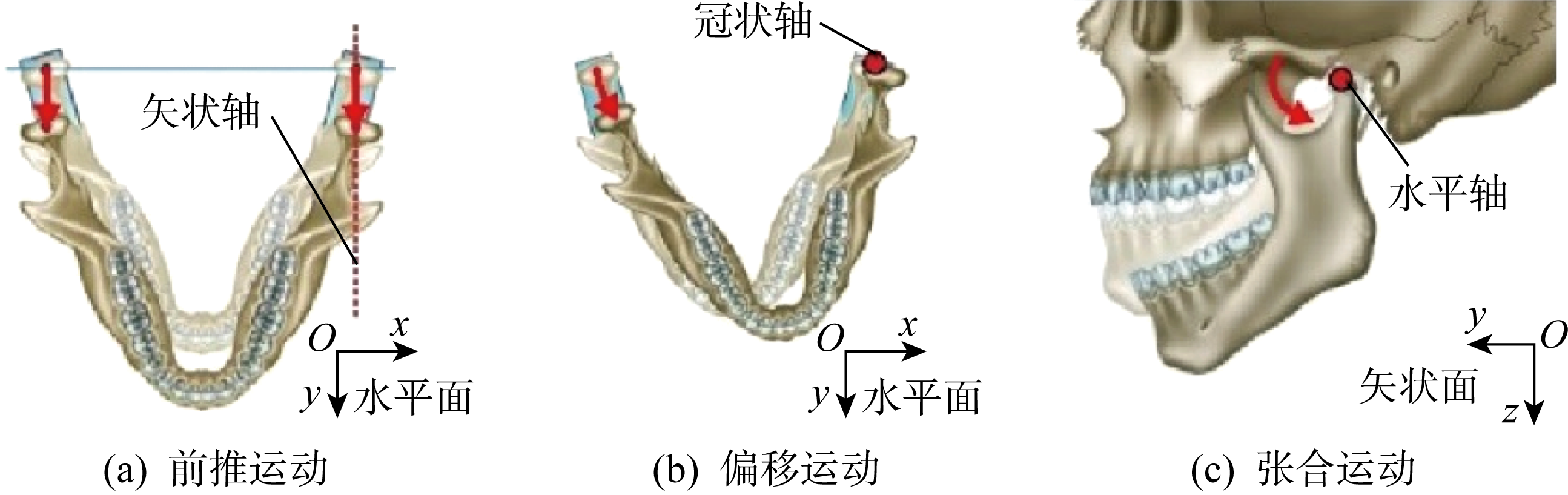
Fig.2
Three basic motion patterns of human jaw
Tab.1
Mapping relationship between mandibular movement and action unit
| 运动单元 | 下颌运动 | 对应肌肉 |
|---|---|---|
| AU26 | 下颌下降 | 咬肌、颞肌、翼状肌 |
| AU29 | 下颌外推 | 翼状肌 |
| AU30 | 下颌侧移 | 翼状肌、咬肌、颞肌 |
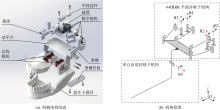
Fig.3
Mechanism of multi-DOF bionic jaw
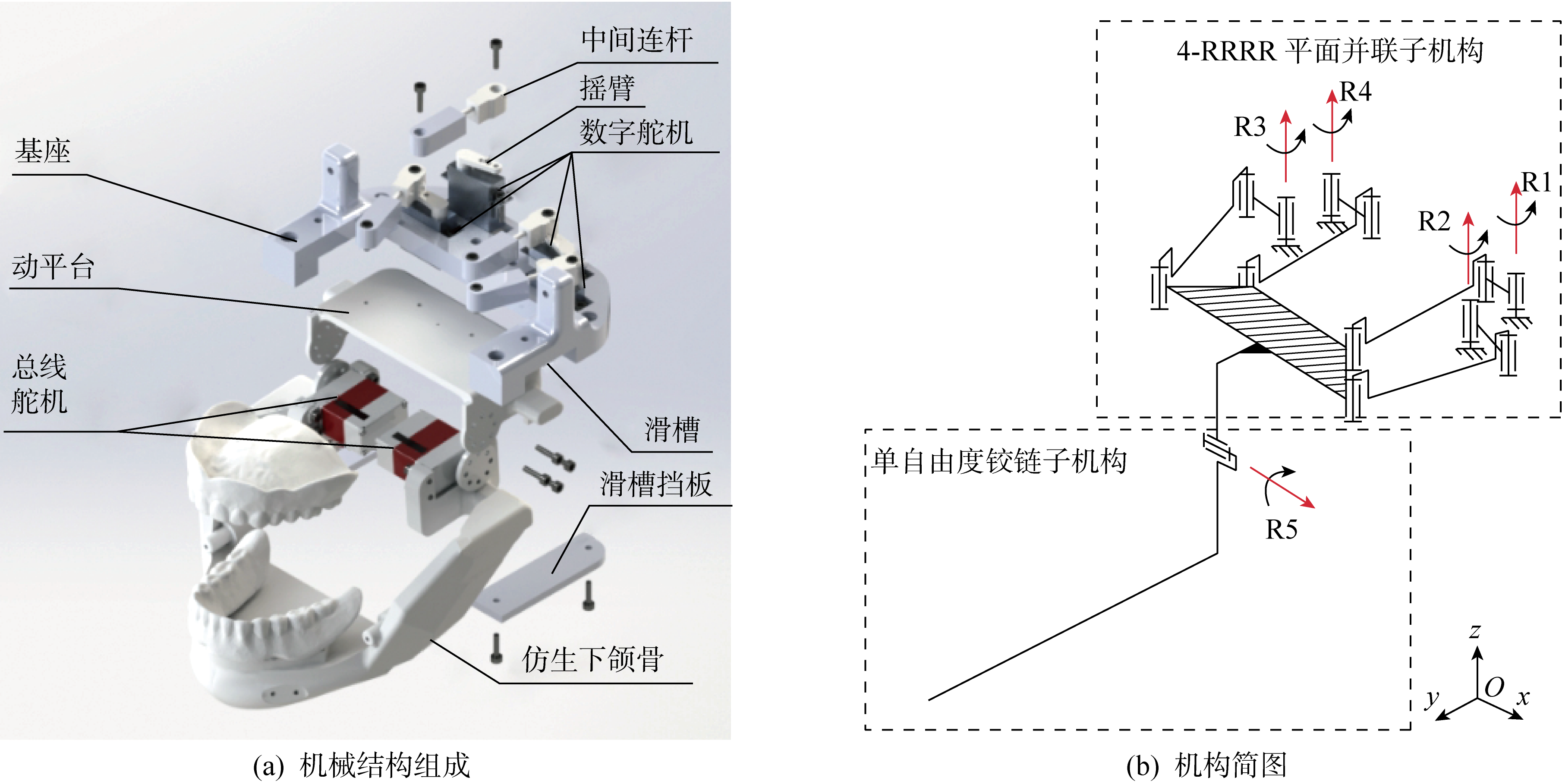
Fig.4
Movements of multi-DOF bionic jaw mechanism
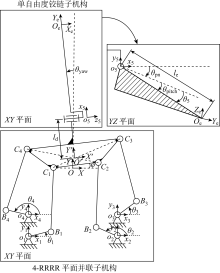
Fig.5
Motion diagram of multi-DOF bionic jaw mechanism
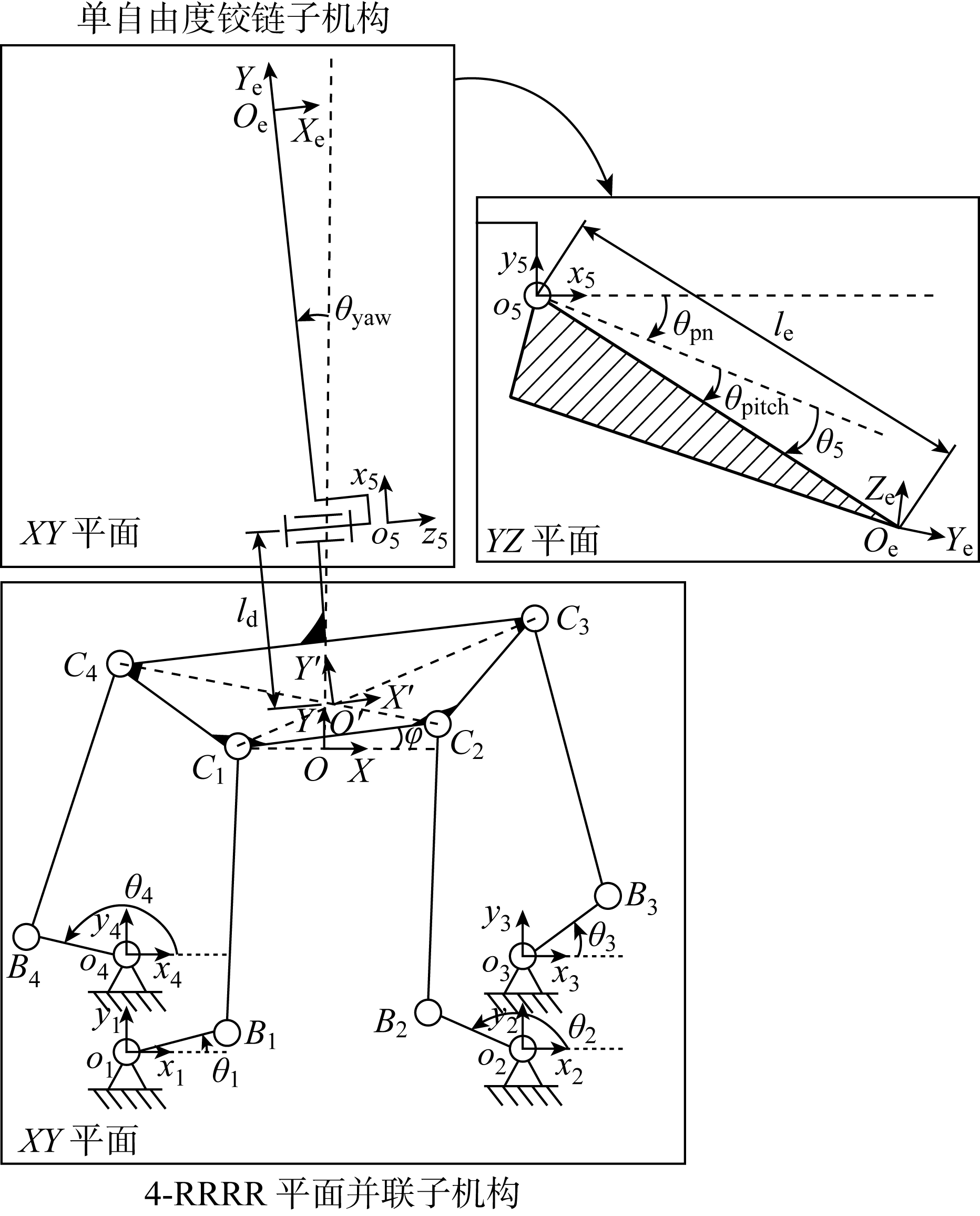
Fig.6
Motion pattern of multi-DOF bionic jaw mechanism

Fig.7
Trajectory tracking of basic motion mode of multi-DOF bionic jaw mechanism
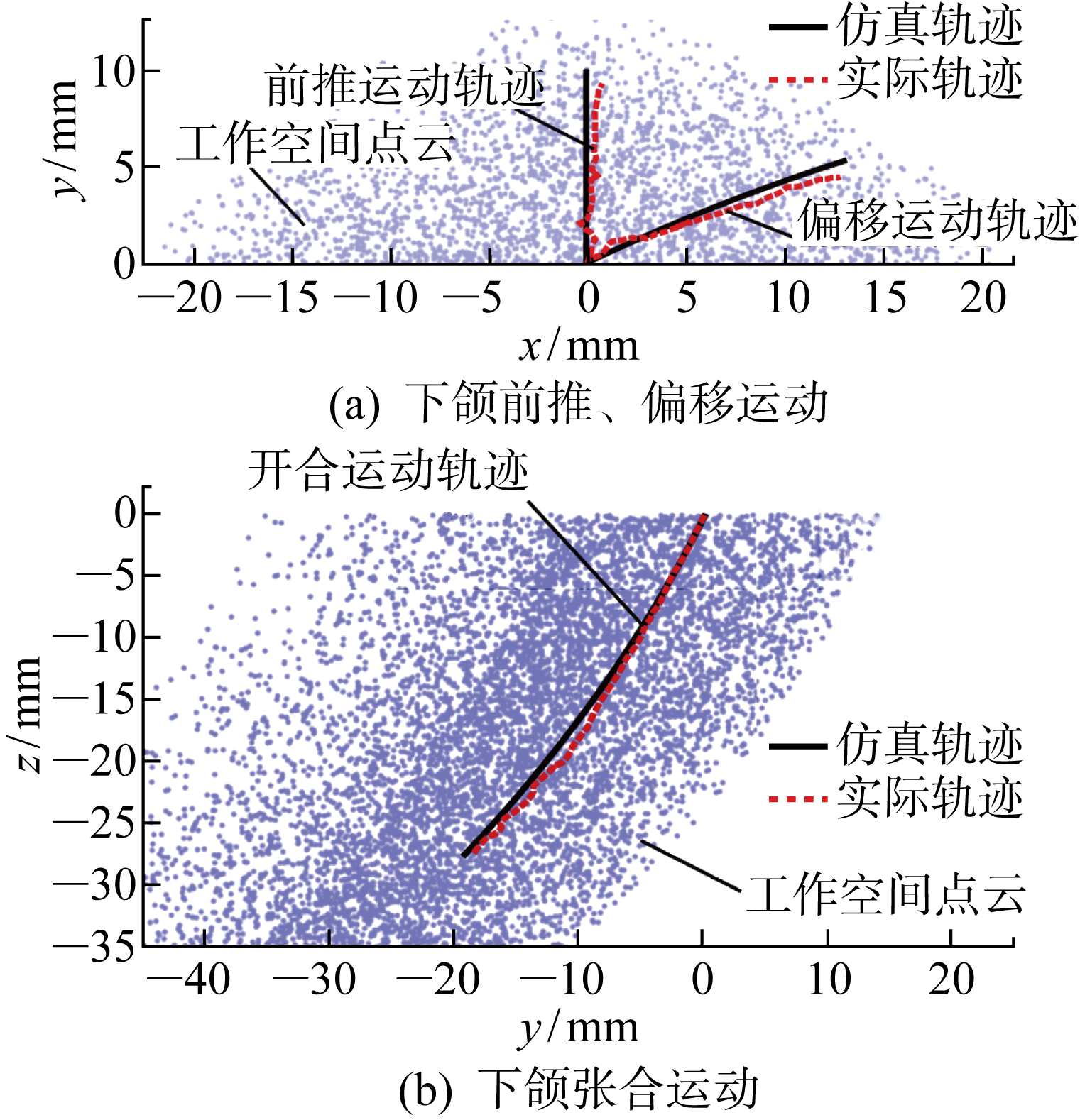
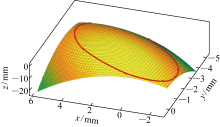
Fig.8
Spatial fitting trajectory of chewing motion
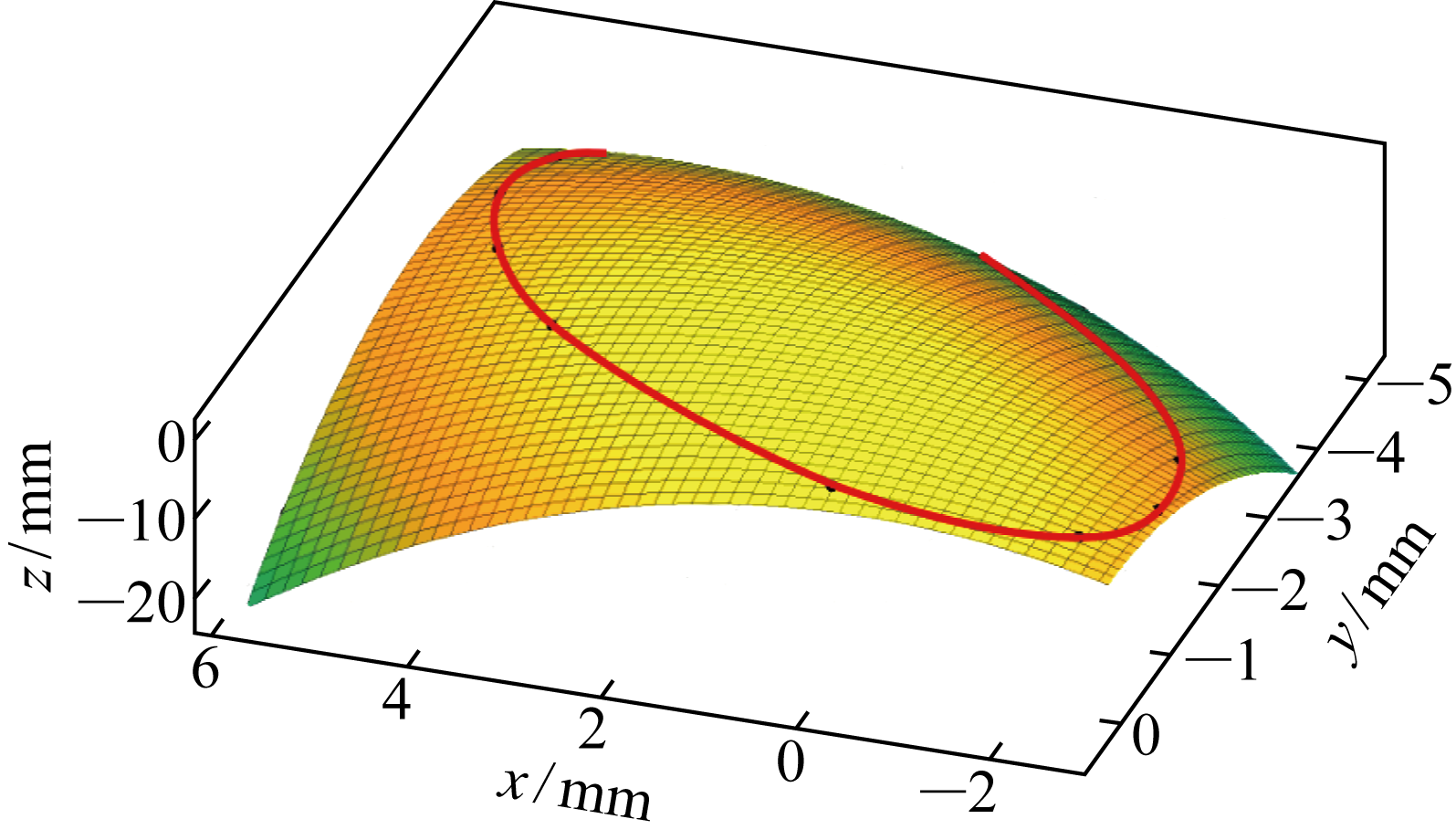

Fig.9
Effect of chewing motion of multi-DOF bionic jaw mechanism


Fig.10
Chewing trajectory of structure of multi-DOF bionic jaw at different motion frequencies
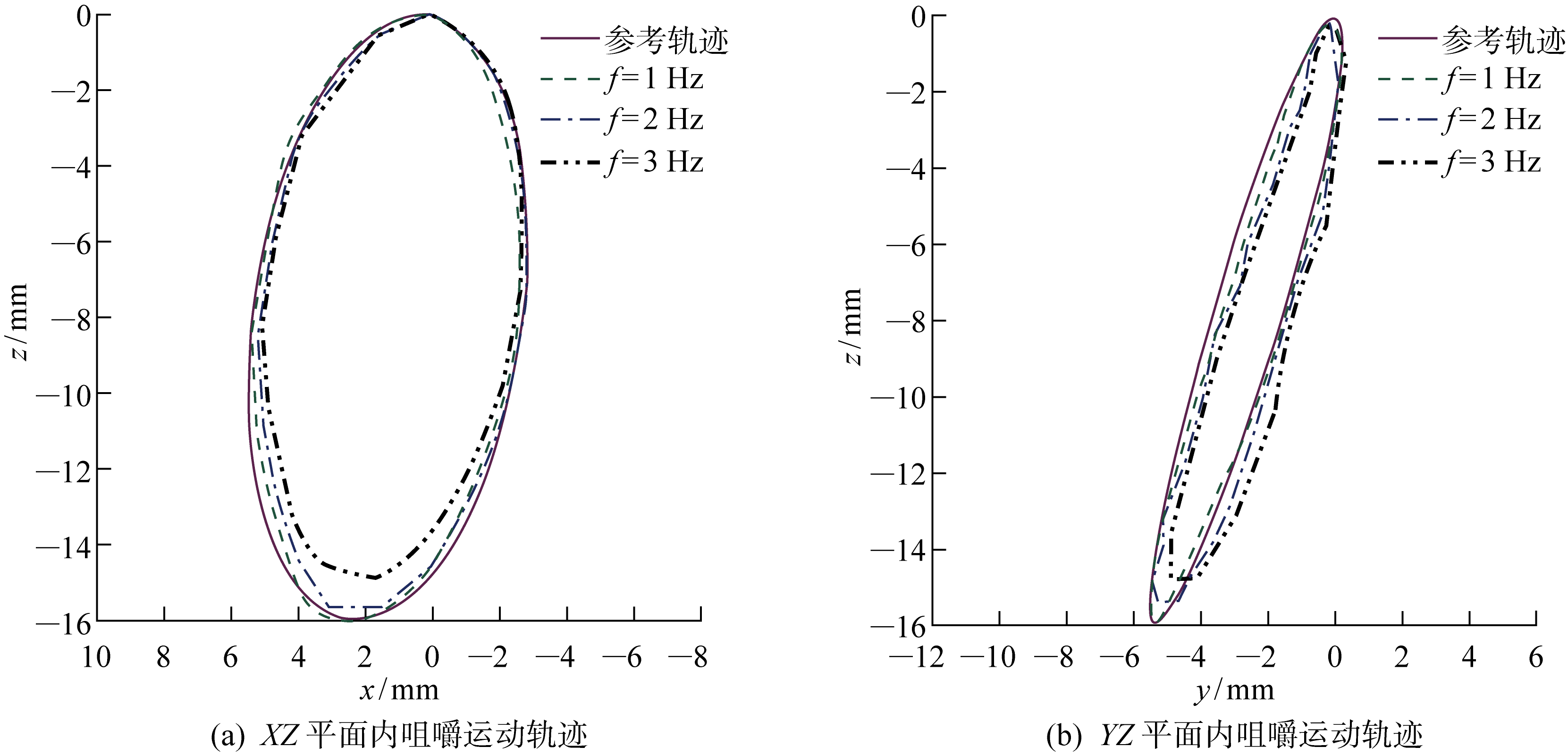
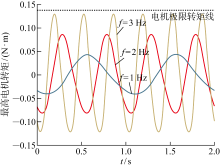
Fig.11
Simulation results of the highest steering gear torque of multi-DOF bionic jaw mechanism at different frequencies of chewing motion

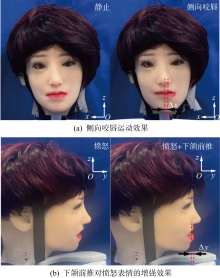
Fig.12
Coupling motion of multi-DOF bionic jaw and oral skin

| [1] | WU F, LIN S, CAO X, et al. Head design and optimization of an emotionally interactive robot for the treatment of autism[C]// Proceedings of the 2019 4th International Conference on Automation, Control and Robotics Engineering. Shenzhen, China: Association for Computing Machinery, 2019: 1-10. |
| [2] | FARAJ Z, SELAMET M, MORALES C, et al. Facially expressive humanoid robotic face[J]. HardwareX, 2020, 9: e00117. |
| [3] | ISHIHARA H, YOSHIKAWA Y, ASADA M. Realistic child robot “affetto” for understanding the caregiver-child attachment relationship that guides the child development[C]// IEEE International Conference on Development and Learning. Frankfurt am Main, Germany: IEEE, 2011, 2: 1-5. |
| [4] | TOAN N K, THINH N T. Mechanical Design of robot head with human-like emotions[C]//21st International Conference on Control, Automation and Systems. Barcelona, Spain: IEEE, 2021: 1720-1725. |
| [5] | MADUMAL K A D A, JAYAWEERA J, ALAHAKOON P M K, et al. Design of voice synchronized robotic lips[C]// 2021 3rd International Conference on Electrical, Control and Instrumentation Engineering. Kuala Lumpur, Malaysia: IEEE, 2021: 1-5. |
| [6] | YANG Y, KE X, XIN J, et al. Development and experiment of facial robot SHFR-III[C]//2015 IEEE International Conference on Mechatronics and Automation. Beijing, China: IEEE, 2015: 1944-1949. |
| [7] | LIU H, CHEN W, GU H, et al. Design, Analysis and experimental research of humanoid head robot[C]// 2021 IEEE 11th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems. Jiaxing, China: IEEE, 2021: 909-914. |
| [8] | ZARINS U. Anatomy of facial expressions[M]. European Union: Exonicus Incorporated, 2018. |
| [9] | FANG J J, KUO T H. Modelling of mandibular movement[J]. Computers in Biology and Medicine, 2008, 38(11/12): 1152-1162. |
| [10] | OZKAN Y K. Movements and mechanics of mandible occlusion concepts and laws of articulation[M]. Turkey: Quintessence, 2018: 293-347. |
| [11] | EKMAN P, FRIESEN W V, TOMKINS S. Facial affect scoring technique: A first validity study[J]. Semiotica III, 1971, 3(1): 37-58. |
| [12] | EKMAN P, FRIESEN W V. Facial action coding system[J]. A Human Face, 2002, 73(2): 115-163. |
| [13] | 王海杰. 人体系统解剖学[M]. 上海: 第二军医大学出版社, 2015. |
| WANG Haijie. Human systemic anatomy[M]. Shanghai: Naval Medical University Press, 2015. | |
| [14] | 姜振宇. 微表情[M]. 北京: 中国友谊出版公司, 2020. |
| JIANG Zhenyu. Microexpression[M]. Beijing: China Friendship Press, 2020. | |
| [15] | 张展铭. 论表情媒介[D]. 济南: 山东艺术学院, 2016. |
| ZHANG Zhanming. The medium of expression[D]. Jinan: Shandong College of Arts, 2016. | |
| [16] | EKMAN P. Emotions revealed[M]. 2nd ed. Denmark: Owl Books, 2003. |
| [17] | 邵磊. 微表情分析[M]. 北京: 科学出版社, 2014. |
| SHAO Lei. Microexpression analysis[M]. Beijing: Science Press, 2014. | |
| [18] | LEMMONS M, BEEBE D. Oral anatomy and physiology[C]// Wiggs’s Veterinary Dentistry: Principles and Practice. Hoboken, USA: John Wiley and Sons, 2019: 1-24. |
| [19] | 李娟. 不同年龄组正常人群的下颌运动轨迹及咀嚼肌表面肌电比较研究[D]. 昆明: 昆明医科大学, 2013. |
| LI Juan. A comparative study of mandibular movement trajectory and masticatory muscle surface electromyography in normal people of different age groups[D]. Kunming: Kunming Medical University, 2013. | |
| [20] | 博煜. 图解微反应[M]. 北京: 现代出版社, 2016. |
| BO Yu. The diagram of micro-reaction[M]. Beijing: Modern Press, 2016. |
| [1] | WANG Qi, LI Lüzhou, DONG Xu, YUAN Ningyi, DING Jianning. Development of a Small Jellyfish Robot with Controllable Trajectory [J]. Journal of Shanghai Jiao Tong University, 2024, 58(8): 1240-1248. |
| [2] | HE Yuntao1,KONG Bo2,3,XI Xiaobing2,3,LUO Yun1. Design and Evaluation of a Novel Splint Used in Distal Radius Fracture [J]. Journal of Shanghai Jiao Tong University, 2018, 52(2): 194-199. |
| [3] | WANG Jiangbei,FANG Yeyang,TONG Xin,ZHANG Shuai,FEI Yanqiong. Design and Locomotion Properties of a Multi-Airbag Bionic Soft Robot [J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 20-25. |
| [4] | ZHOU Junfan,LUO Yun. Theory and Design of a GravityDriven Orthotic Device for Sitting Posture [J]. Journal of Shanghai Jiaotong University, 2016, 50(02): 182-187. |
| [5] | XU Mingfeng,ZHU Liangfan,ZHOU Wenxuan,LUO Yun. Design and Evaluation of a Novel Unloading Knee Brace [J]. Journal of Shanghai Jiaotong University, 2014, 48(02): 181-186. |
| [6] | WANG Wen-Jie-a, CHEN Feng-a, b , JIANG Zhi-Bin-a, b . Cooperative Game Based Mechanisms Design in Carrier Alliance [J]. Journal of Shanghai Jiaotong University, 2011, 45(12): 1778-1781. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||