Journal of Shanghai Jiao Tong University ›› 2025, Vol. 59 ›› Issue (9): 1249-1259.doi: 10.16183/j.cnki.jsjtu.2023.482
• New Type Power System and the Integrated Energy • Previous Articles Next Articles
CHE Zhiyuan, YU Haitao( ), PANG Yuyi, ZHANG Jiahui
), PANG Yuyi, ZHANG Jiahui
Received:2023-09-21
Revised:2023-11-05
Accepted:2023-11-24
Online:2025-09-28
Published:2025-09-25
CLC Number:
CHE Zhiyuan, YU Haitao, PANG Yuyi, ZHANG Jiahui. Tracking Differentiator-Based Dual-Time-Scale Sliding Mode Control for Permanent Magnet Synchronous Motor[J]. Journal of Shanghai Jiao Tong University, 2025, 59(9): 1249-1259.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2023.482
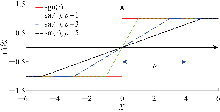
Fig.1
Signum and saturation functions
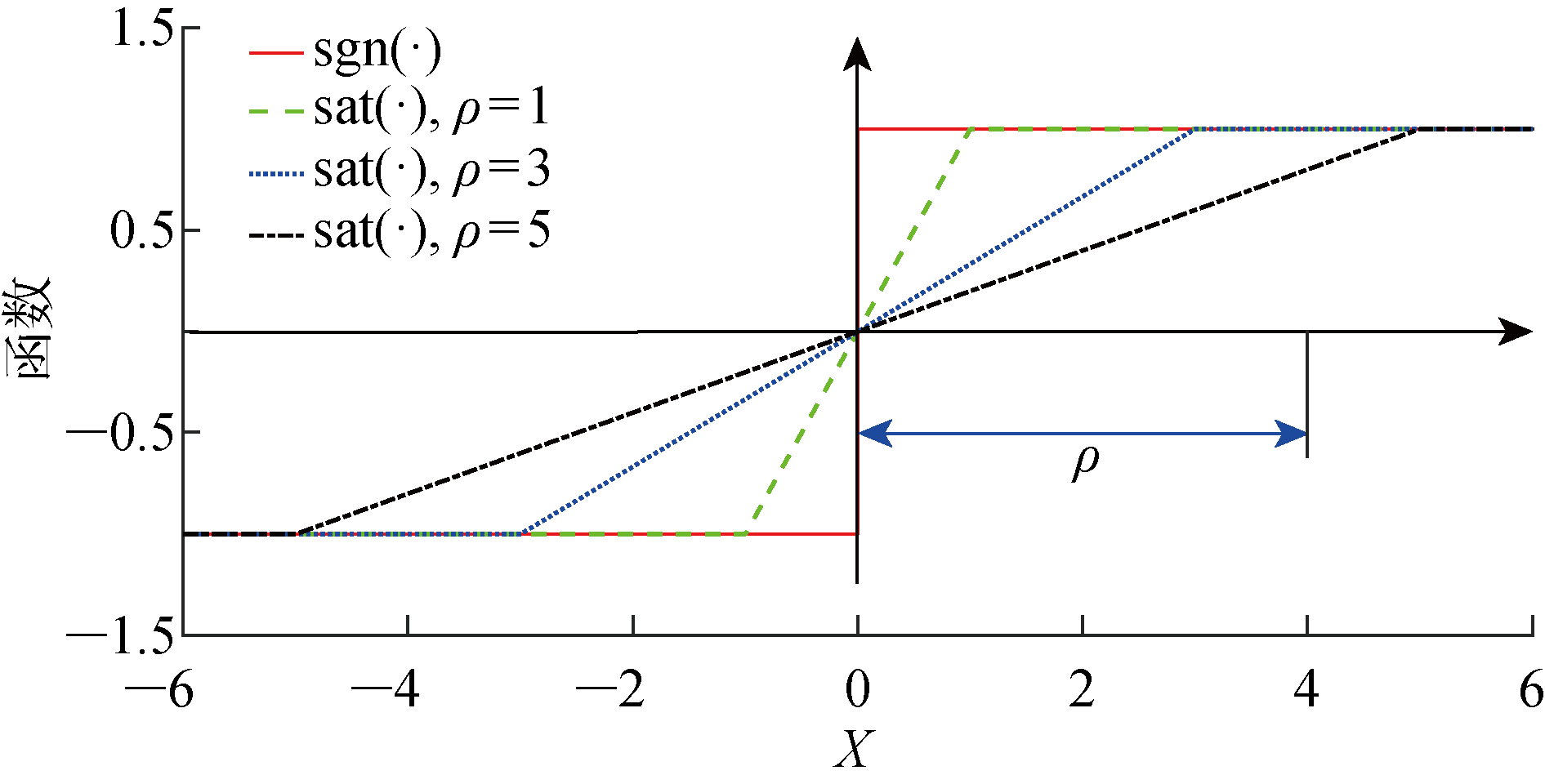
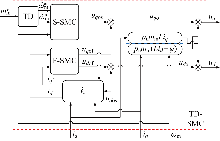
Fig.2
TD-based non-cascade composite SMC
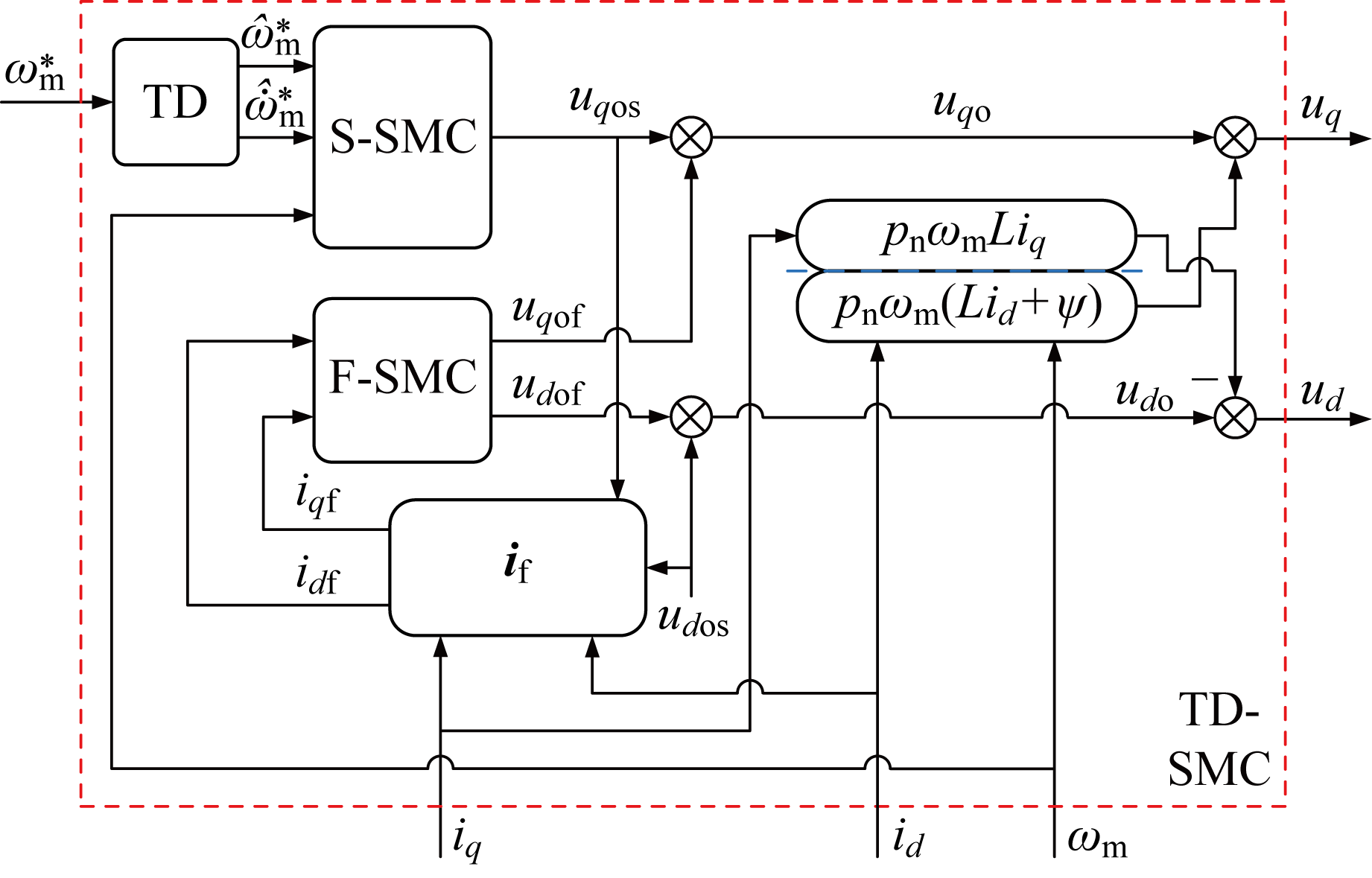
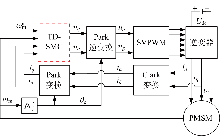
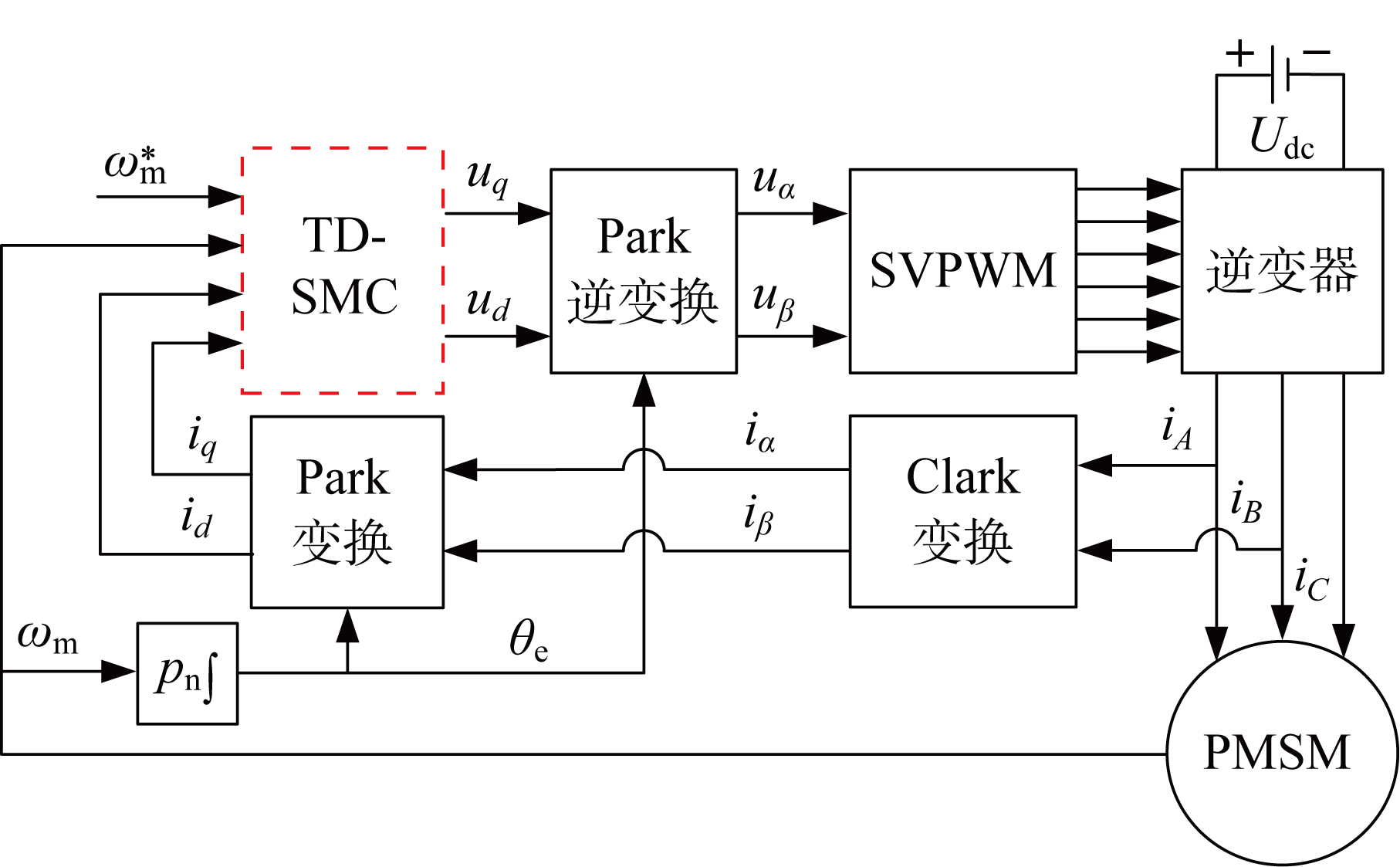
Fig.3
Whole schematic block diagram of PMSM servo system
Tab.1
Parameters of PMSM
| 参数 | 数值 |
|---|---|
| pn | 4 |
| R/Ω | 0.454 |
| L/mH | 4.492 |
| ψ/Wb | 0.1435 |
| F | 3.79×10-3 |
| J/(kg·m2) | 2.77×10-3 |
Fig.4
Response performances of SMC systems
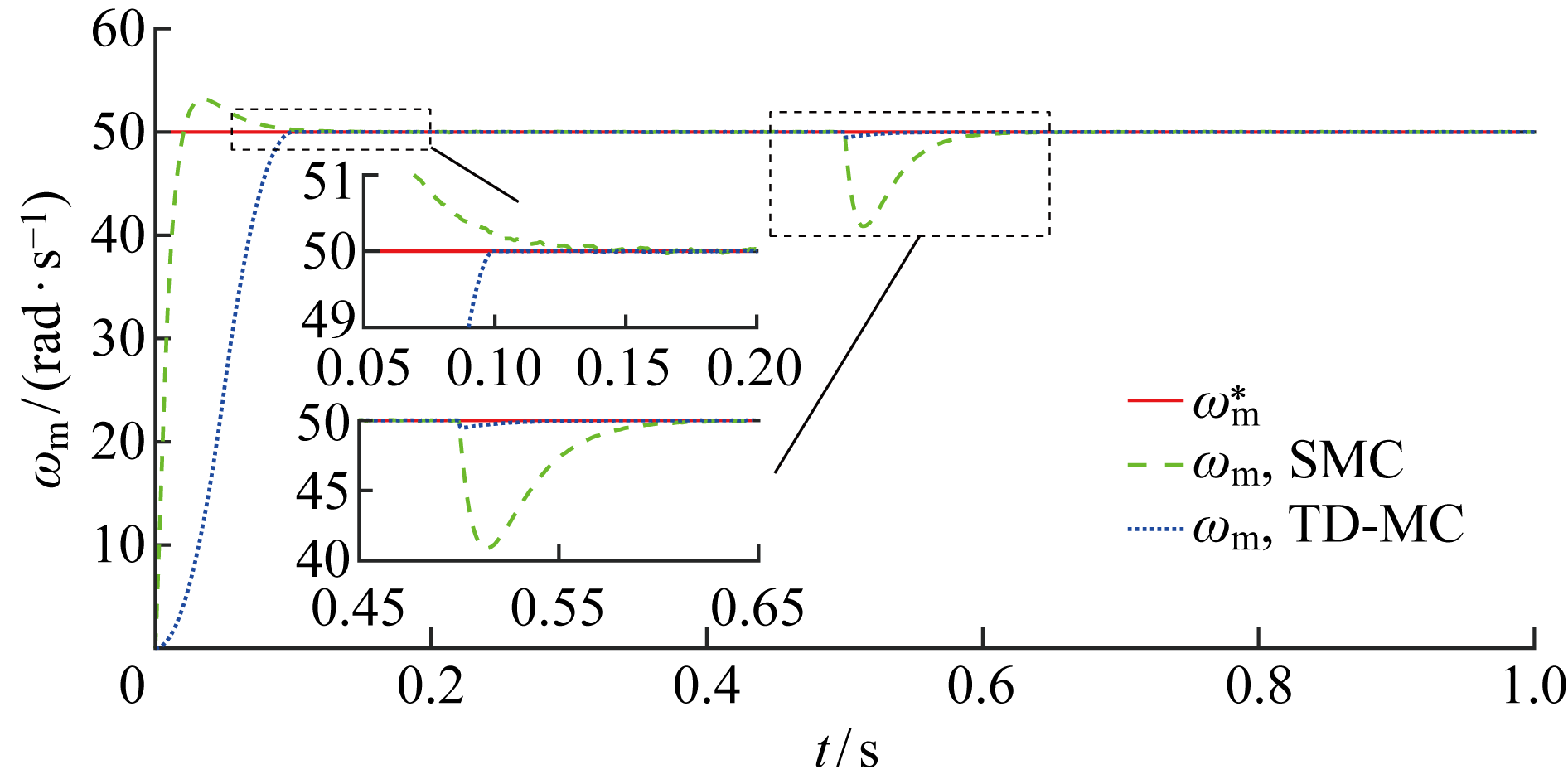
Fig.5
Response of nonlinear tracking differentiator (r=2×104)
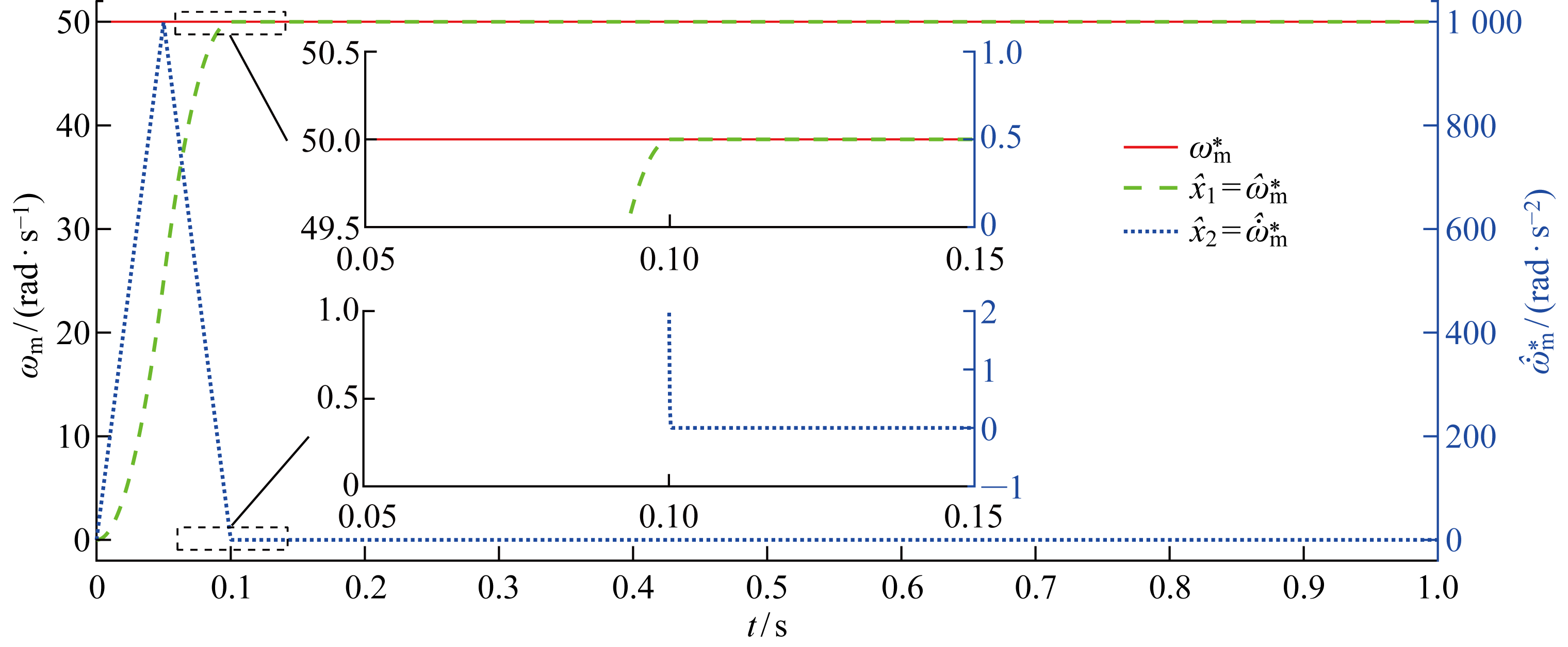
Fig.6
Response of nonlinear tracking differentiator (r=2×103)
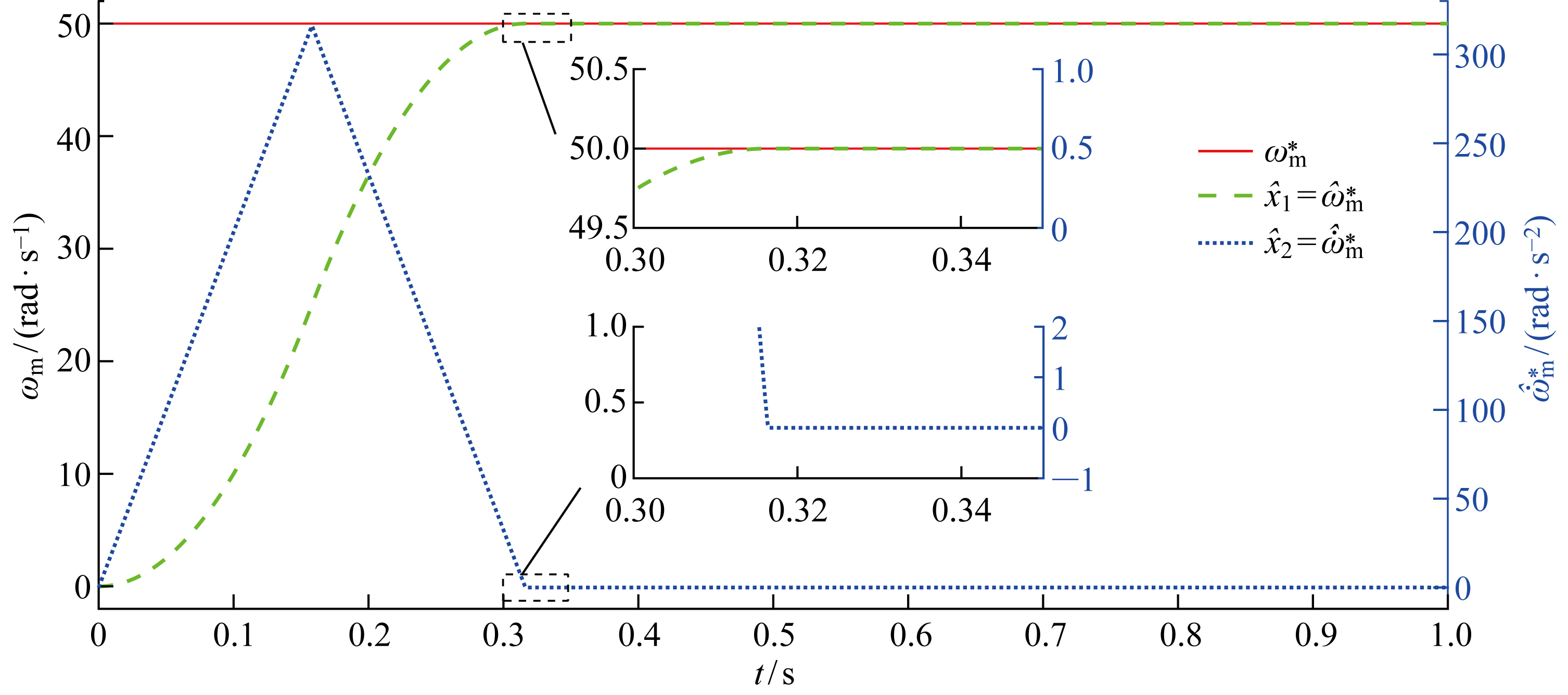
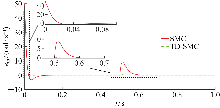
Fig.7
Tracking errors of SMC systems
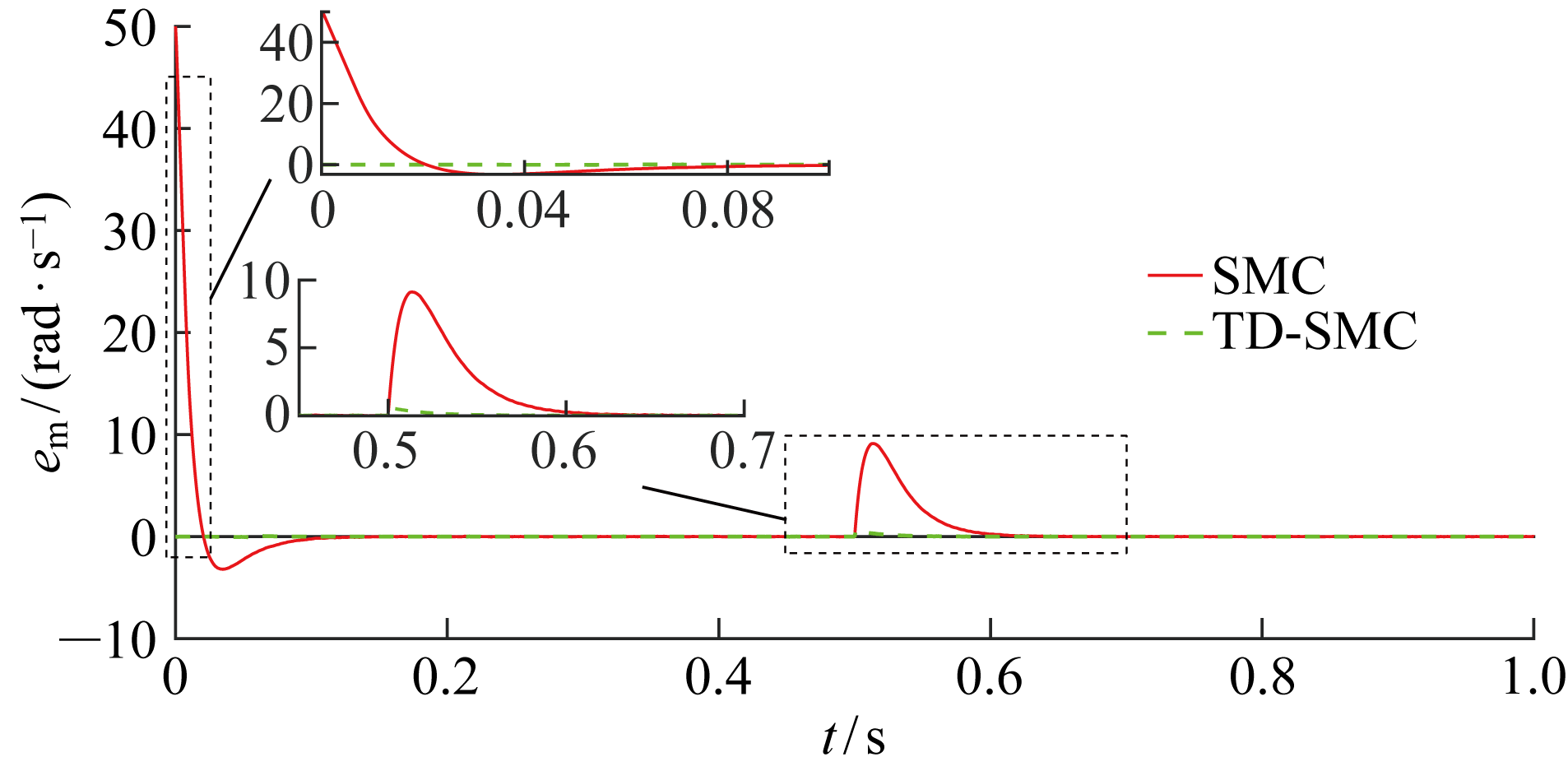
Tab.2
Performance comparisons of SMC systems
| 控制 策略 | 超调量/ (rad·s-1) | 调节 时间/s | 跌落值(实际值)/ (rad·s-1) | 恢复时间 (实际值)/s |
|---|---|---|---|---|
| SMC | 3.2 | 0.12 | 9.1(40.9) | 0.12(0.62) |
| TD-SMC | - | < 0.1 | 0.5(49.5) | <0.04(<0.54) |
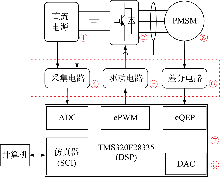
Fig.8
Whole schematic of regulation system
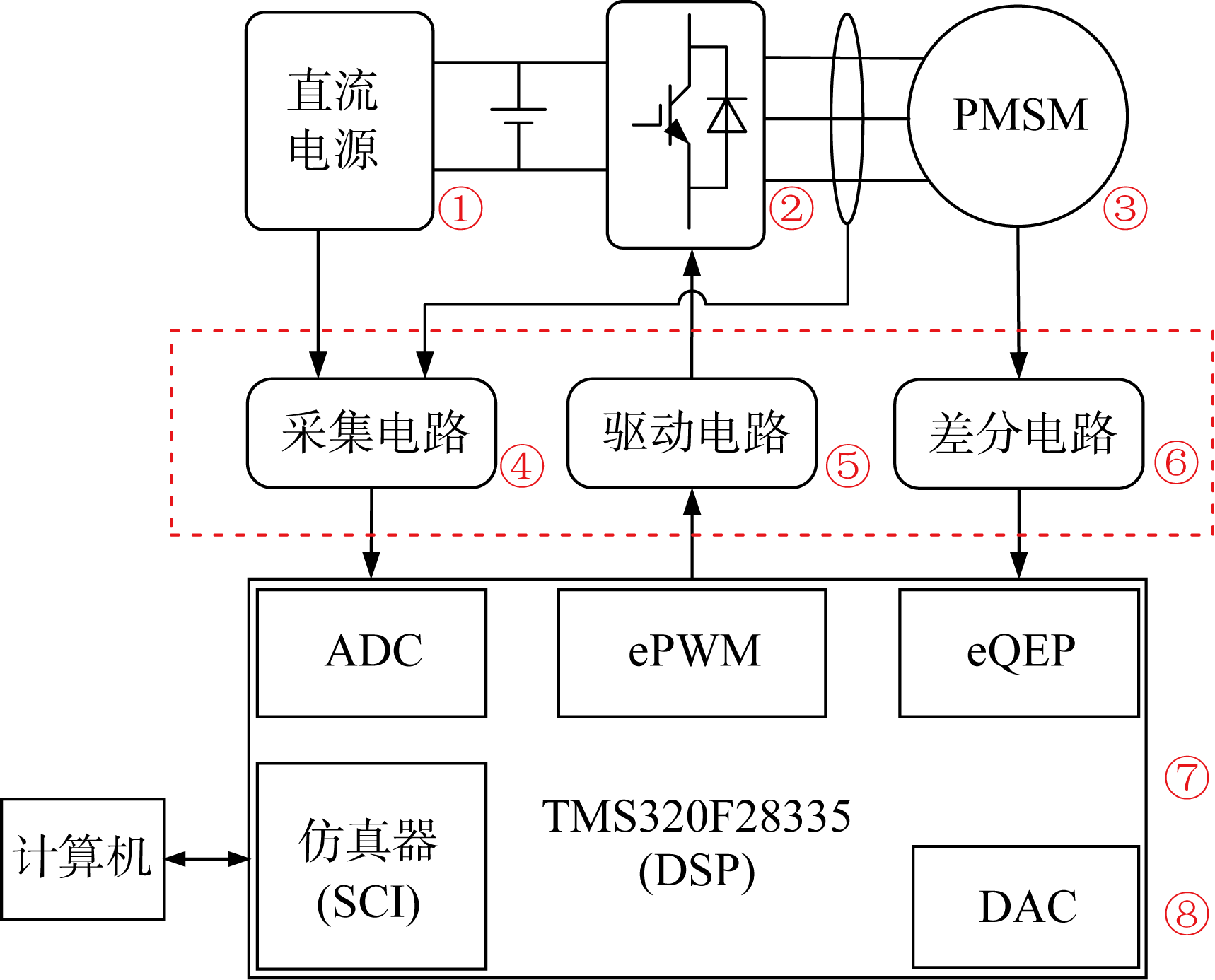

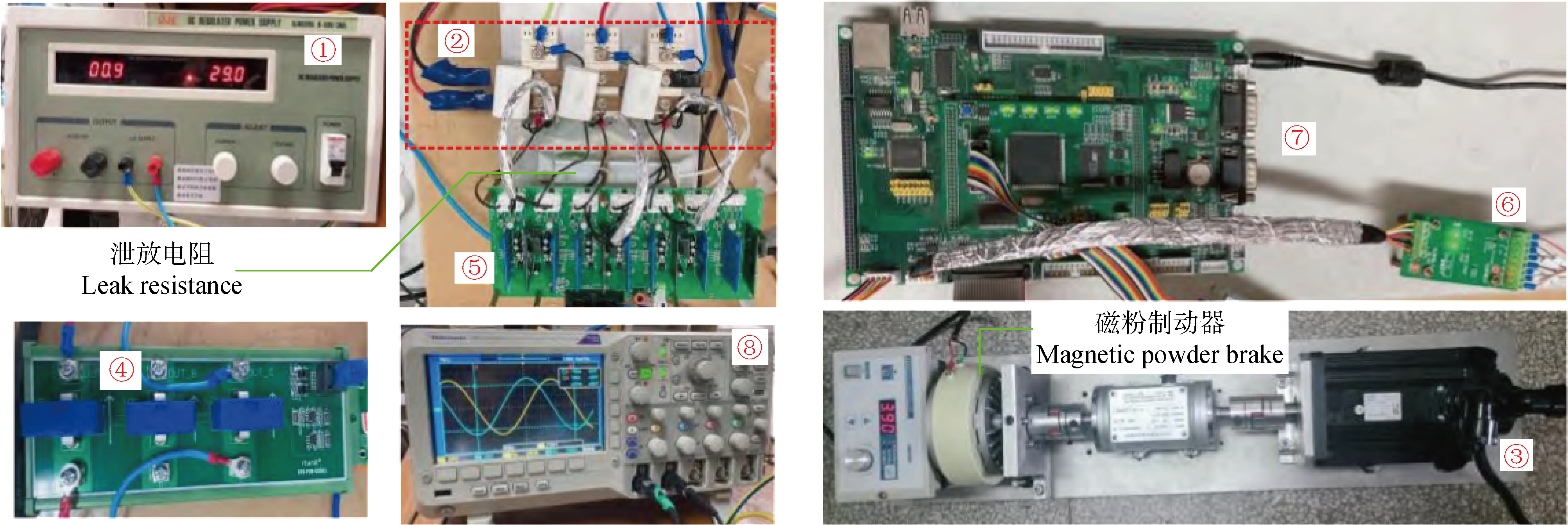
Fig.9
Hardware platform of regulation system
Tab.3
Parameters of S-SMC
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| cs | 60 | δ | 1000 |
| ksn | 0.1 | kT | 10 |
| ξ | 0.05 | σ | 1.5 |
| μ | 0.1 | km | 300 |
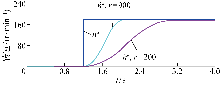
Fig.10
Estimation of the tracking differentiator
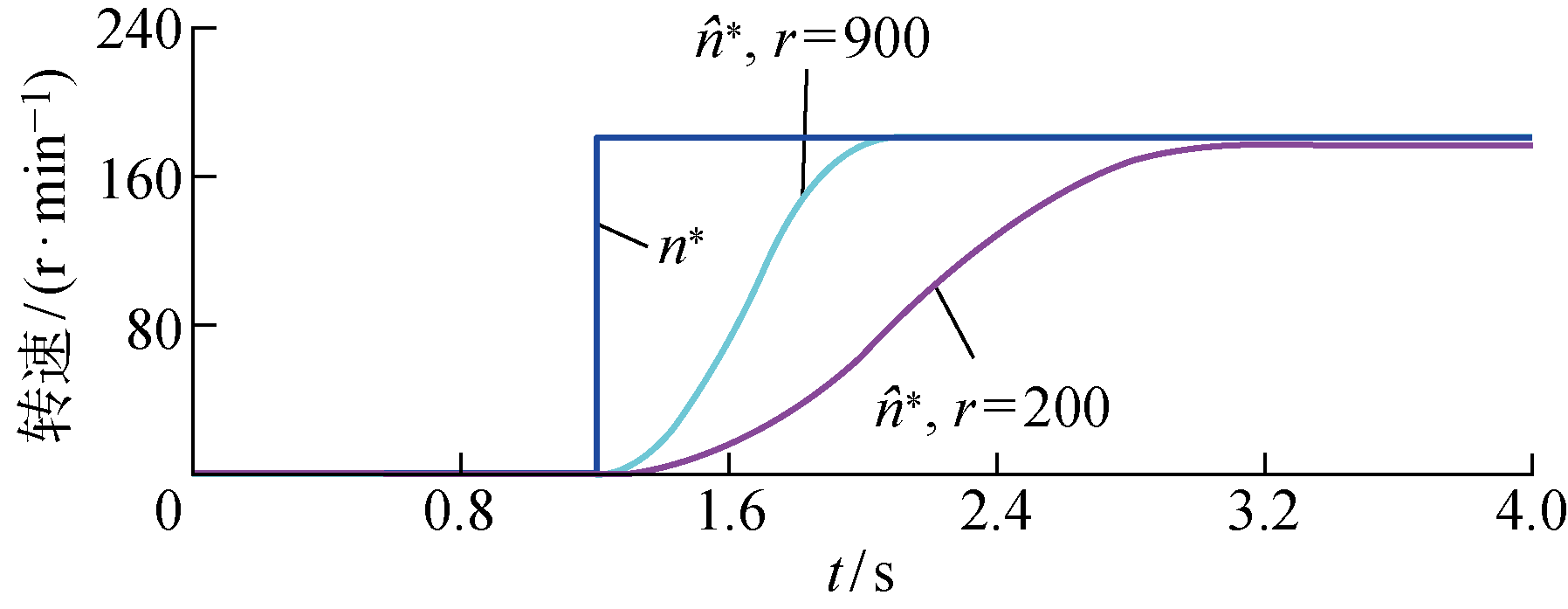
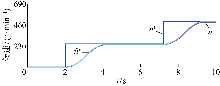
Fig.11
Tracking performance of non-cascade SMC
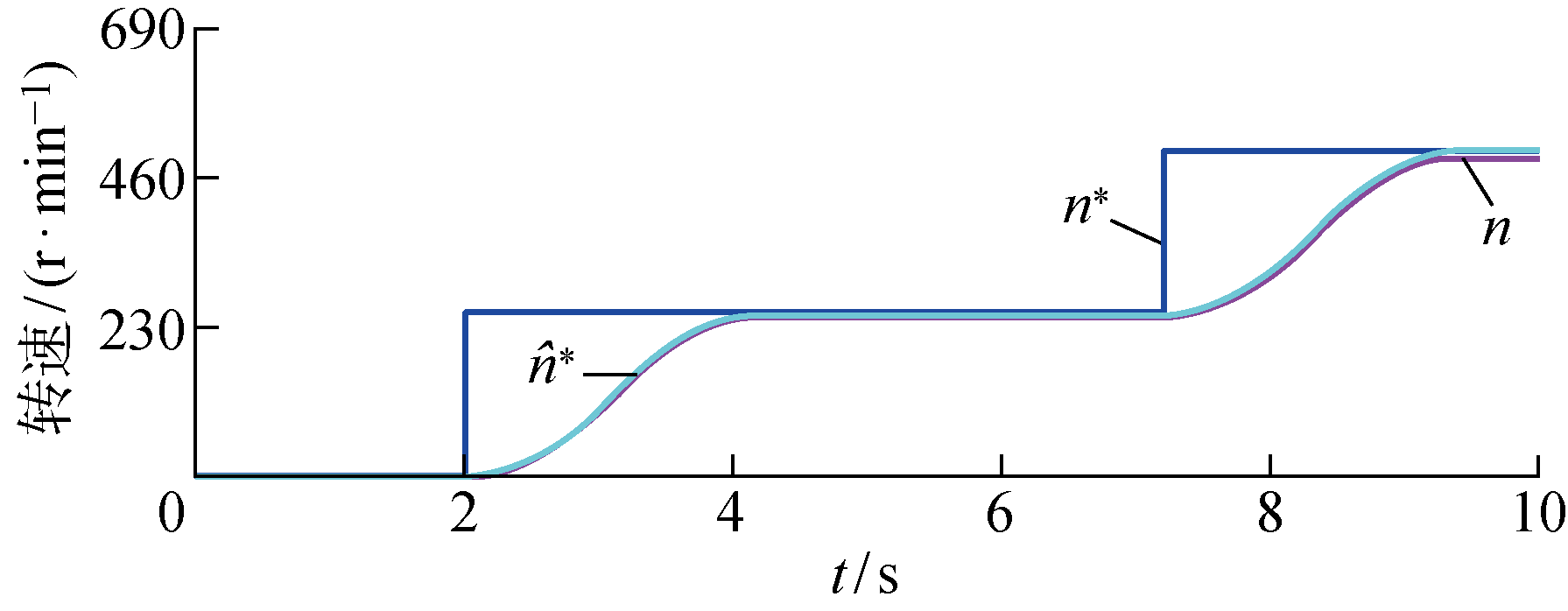
Fig.12
Response of positive step
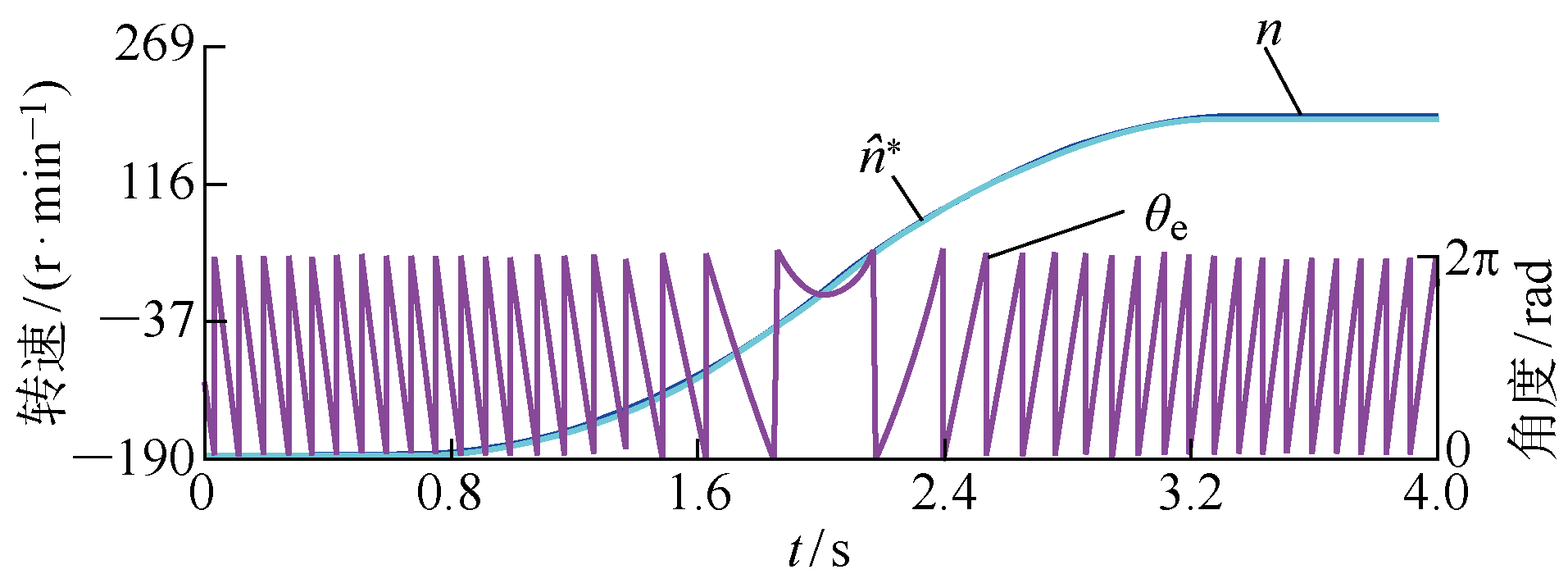
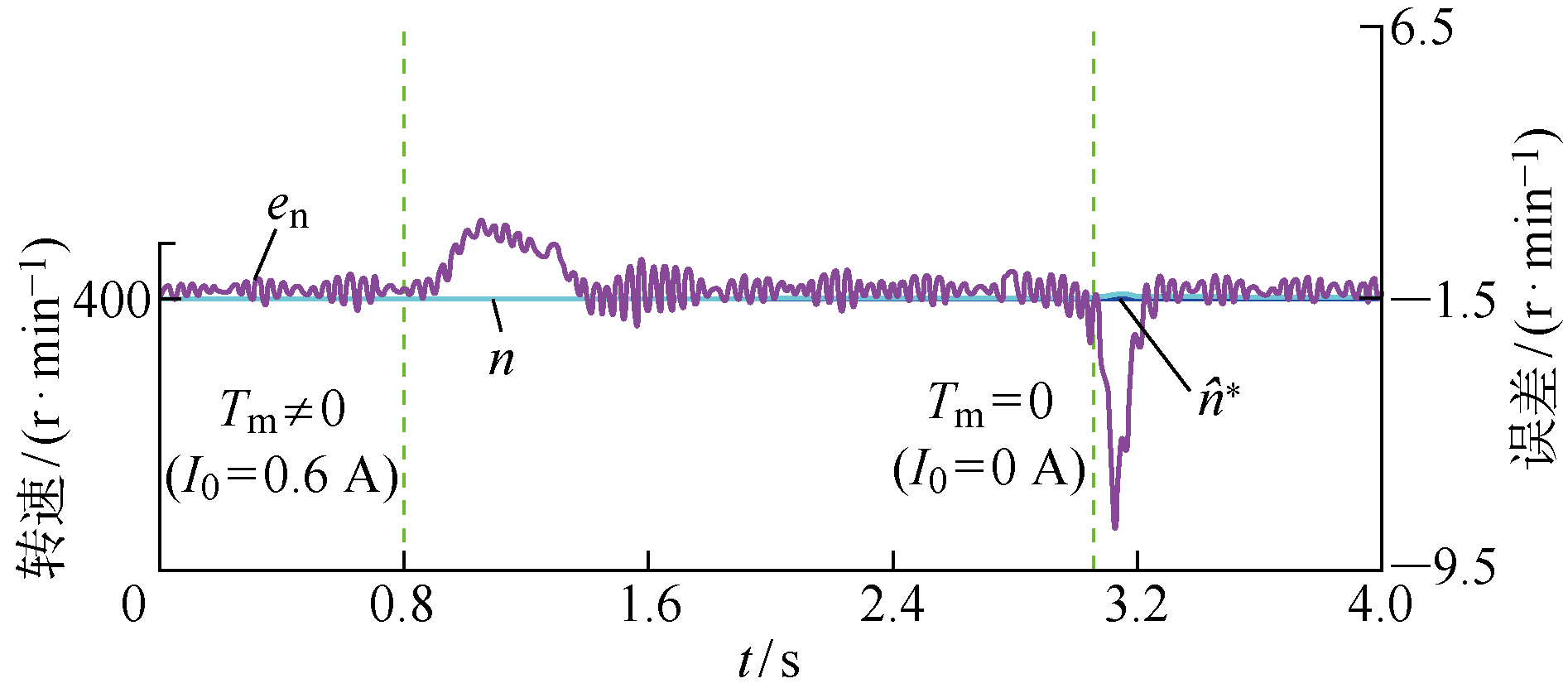
Fig.13
Anti-disturbance performance of SMC system
| [1] |
YANG C Y, CHE Z Y, ZHOU L N. Composite feedforward compensation for force ripple in permanent magnet linear synchronous motors[J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(6): 782-788.
doi: 10.1007/s12204-019-2111-5 |
| [2] |
凌辉, 杜钦君, 冯晗, 等. 基于五电平变换器的开关磁阻电动机转矩脉动抑制方法[J]. 上海交通大学学报, 2022, 56(12): 1608-1618.
doi: 10.16183/j.cnki.jsjtu.2022.124 |
| LING Hui, DU Qinjun, FENG Han, et al. Torque ripple reduction method of switched reluctance motor based on five-level converter[J]. Journal of Shanghai Jiao Tong University, 2022, 56(12): 1608-1618. | |
| [3] | YU K L, WANG Z. Position sensorless control of IPMSM using adjustable frequency setting square-wave voltage injection[J]. IEEE Transactions on Power Electronics, 2022, 37(11): 12973-12979. |
| [4] |
张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47.
doi: 10.16183/j.cnki.jsjtu.2019.104 |
| ZHANG Xianku, HAN Xu. Modeling and sliding mode control for chaotic yawing phenomenon of large oil tanker[J]. Journal of Shanghai Jiao Tong University, 2021, 55(1): 40-47. | |
| [5] | YANG C Y, CHE Z Y, ZHOU L N. Integral sliding mode control for singularly perturbed systems with mismatched disturbances[J]. Circuits, Systems, and Signal Processing, 2019, 38(4): 1561-1582. |
| [6] |
周齐贤, 王寅, 孙学安. 基于增益自适应超螺旋滑模理论的无人机控制[J]. 上海交通大学学报, 2022, 56(11): 1453-1460.
doi: 10.16183/j.cnki.jsjtu.2022.238 |
| ZHOU Qixian, WANG Yin, SUN Xuean. Control of unmanned aerial vehicle based on gain adaptive super-twisting sliding mode theory[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1453-1460. | |
| [7] | 柯少兴, 李建贵, 郝诚, 等. 基于滑模观测器估计误差反馈的永磁同步电机转速控制策略[J]. 微电机, 2020, 53(6): 48-52. |
| KE Shaoxing, LI Jiangui, HAO Cheng, et al. Speed control strategy of PMSM based on estimation error feedback of synovial mode observer[J]. Micromotors, 2020, 53(6): 48-52. | |
| [8] | 刘京, 李洪文, 邓永停. 基于新型趋近律和扰动观测器的永磁同步电机滑模控制[J]. 工程科学学报, 2017, 39(6): 933-944. |
| LIU Jing, LI Hongwen, DENG Yongting. PMSM sliding-mode control based on novel reaching law and disturbance observer[J]. Chinese Journal of Engineering, 2017, 39(6): 933-944. | |
| [9] | 淡宁, 袁宇浩, 冯进. 基于快速STA与扰动观测器的PMSM滑模控制[J]. 计算机仿真, 2020, 37(10): 173-178. |
| DAN Ning, YUAN Yuhao, FENG Jin. Sliding mode control of PMSM based on fast STA and disturbance observer[J]. Computer Simulation, 2020, 37(10): 173-178. | |
| [10] | XU B, ZHANG L, JI W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives[J]. IEEE Transactions on Transportation Electrification, 2021, 7(4): 2753-2762. |
| [11] | CHE Z Y, YU H T, MOBAYEN S, et al. A singular perturbation approach-based non-cascade sliding mode control for surface-mounted PMSMs[J]. Applied Sciences, 2022, 12(20): 10500. |
| [12] | CHE Z Y, YU H T, MOBAYEN S, et al. Dual-time-scale sliding mode control for surface-mounted permanent magnet synchronous motors[J]. Symmetry, 2022, 14(9): 1835. |
| [13] | ZHOU L N, SHEN L P, YANG C Y. Disturbance-observer based sliding mode control for fuzzy singularly perturbed systems[J]. Journal of Intelligent & Fuzzy Systems, 2019, 37(1): 1055-1064. |
| [14] | YOO H, GAJIC Z. New designs of linear observers and observer-based controllers for singularly perturbed linear systems[J]. IEEE Transactions on Automatic Control, 2018, 63(11): 3904-3911. |
| [1] | Li Songyang, Chen Wenbo, Wan Heng. Model Predictive Control Method Based on Data-Driven Approach for Permanent Magnet Synchronous Motor Control System [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 270-279. |
| [2] | HE Chenlua (何晨璐), FENG Zhengpinga,b∗ (冯正平). Improved Nonsingular Fast Terminal Sliding Mode Control of Unmanned Underwater Hovering Vehicle [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 393-401. |
| [3] | YUE Caicheng1,QIAN Linfang1,XU Yadong1,LI Ying2. Adaptive Fuzzy Sliding Mode Control for a Chain Driving Shell Magazine Based on an Exponential Reaching Law [J]. Journal of Shanghai Jiao Tong University, 2018, 52(6): 750-756. |
| [4] | Xinhua SHI, Zhifeng ZHOU. Research of Adaptive Flux Weakening Strategy of Permanent Magnet Synchronous Motor [J]. Research and Exploration in Laboratory, 2017, 36(5): 40-43. |
| [5] | ZENG Jinling1,XU Yu2,HAN Yepeng2,LI Guanhua2,ZHANG Qun2. Cooling Simulation Analysis Based on Multi-Field Coupling Technology of Permanent Magnet Synchronous Motor [J]. Journal of Shanghai Jiaotong University, 2014, 48(09): 1246-1251. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||