Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (4): 498-510.doi: 10.16183/j.cnki.jsjtu.2022.513
• Electronic Information and Electrical Engineering • Previous Articles Next Articles
QIAN Leiyuan, QIN Fangjun, LI Kailong( ), ZHU Tiangao
), ZHU Tiangao
Received:2022-12-12
Revised:2023-01-06
Accepted:2023-03-03
Online:2024-04-28
Published:2024-04-30
CLC Number:
QIAN Leiyuan, QIN Fangjun, LI Kailong, ZHU Tiangao. Robust Adaptive Algorithm Based on SE(3) and Its Application in SINS/DVL[J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 498-510.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.513

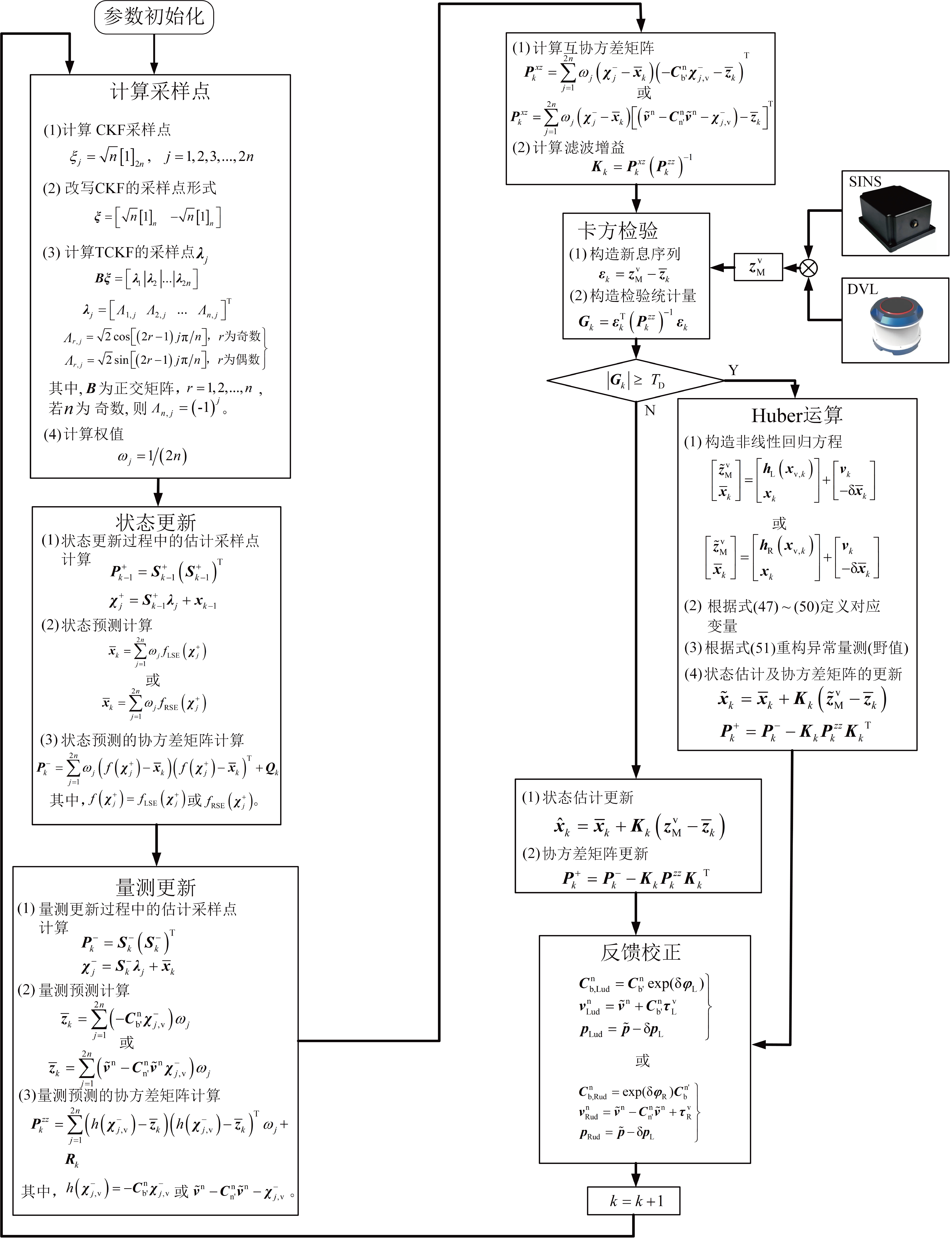
Fig.1
Specific steps of SE(3)RATCKF
Tab.1
Parameters of SINS/DVL integrated navigation shipboard test sensor
| 传感器 | 误差项 | 误差值 |
|---|---|---|
| IMU | 加速度计漂移 (10-6g) | ≤50 |
| IMU | 陀螺仪漂移/ [(°)·h-1] | ≤0.02 |
| DVL | 位置误差/ m | ≤10 |
| DVL | 速度误差/ (m·s-1) | ≤0.005 |
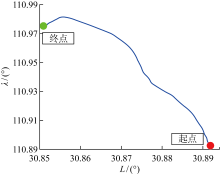
Fig.2
Trajectory of carrier
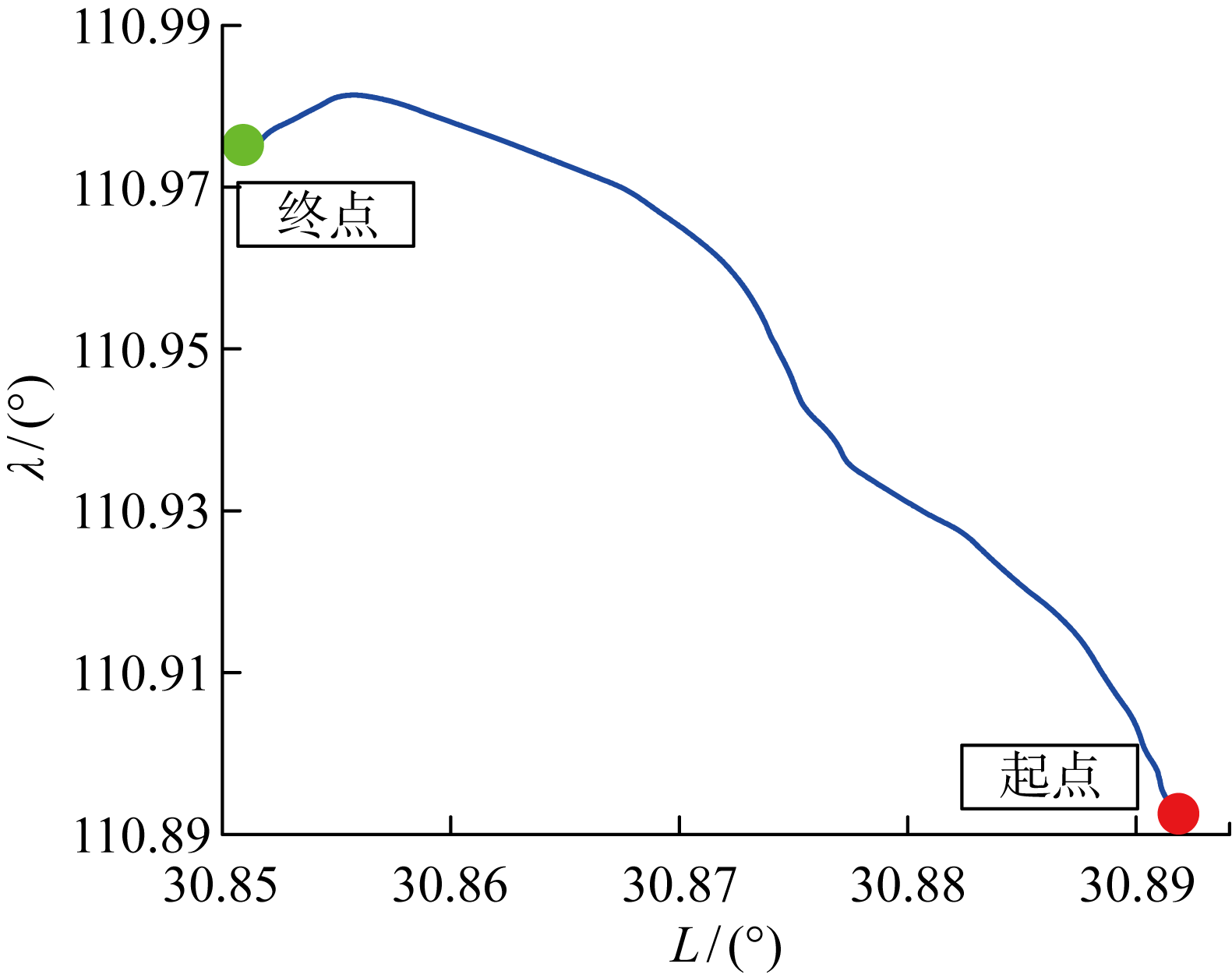
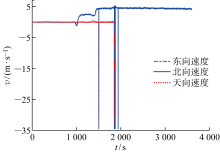
Fig.3
Measurement information provided by DVL
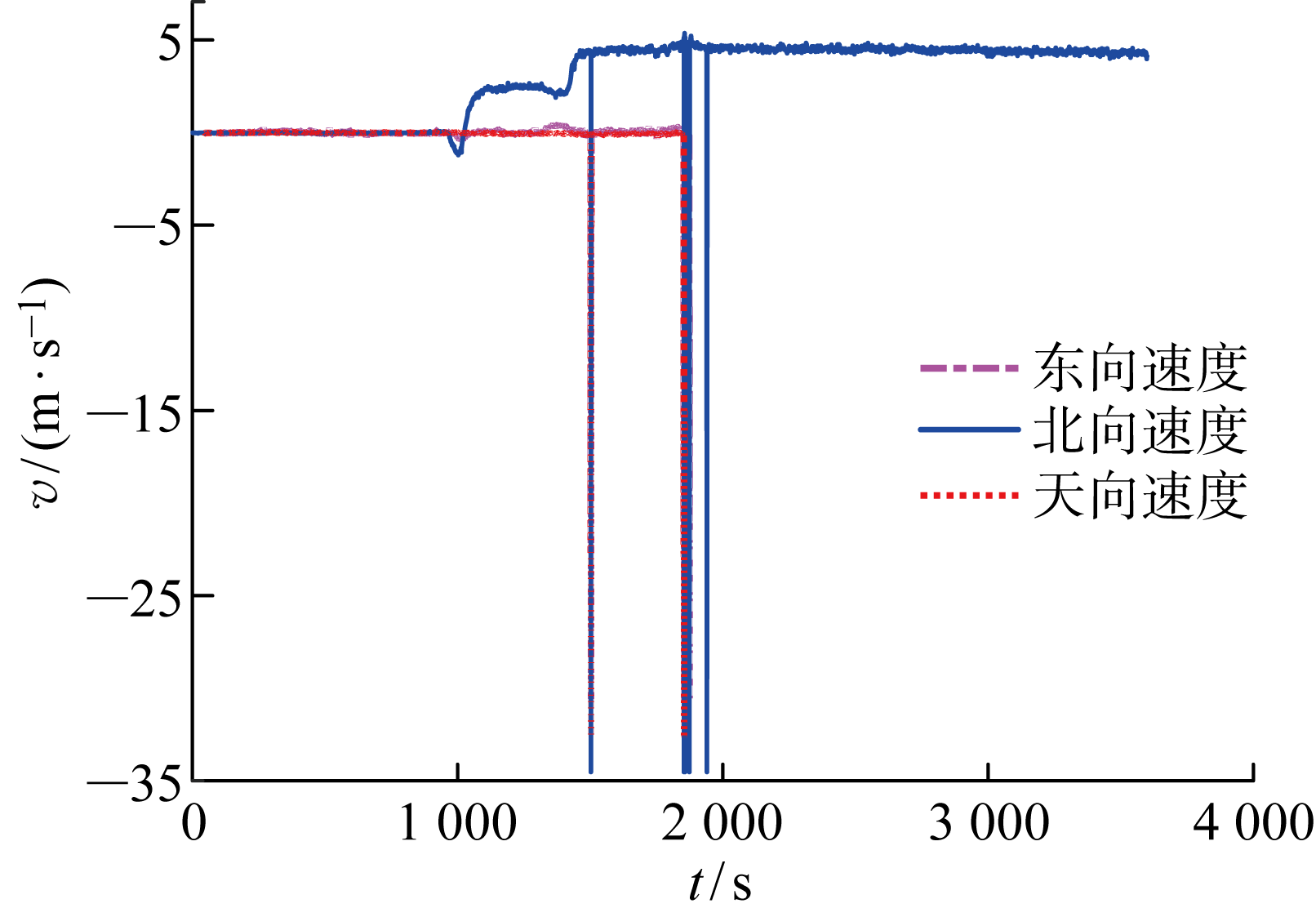

Fig.4
Navigation error at a misalignment angle of (0°, 0°, 0°)
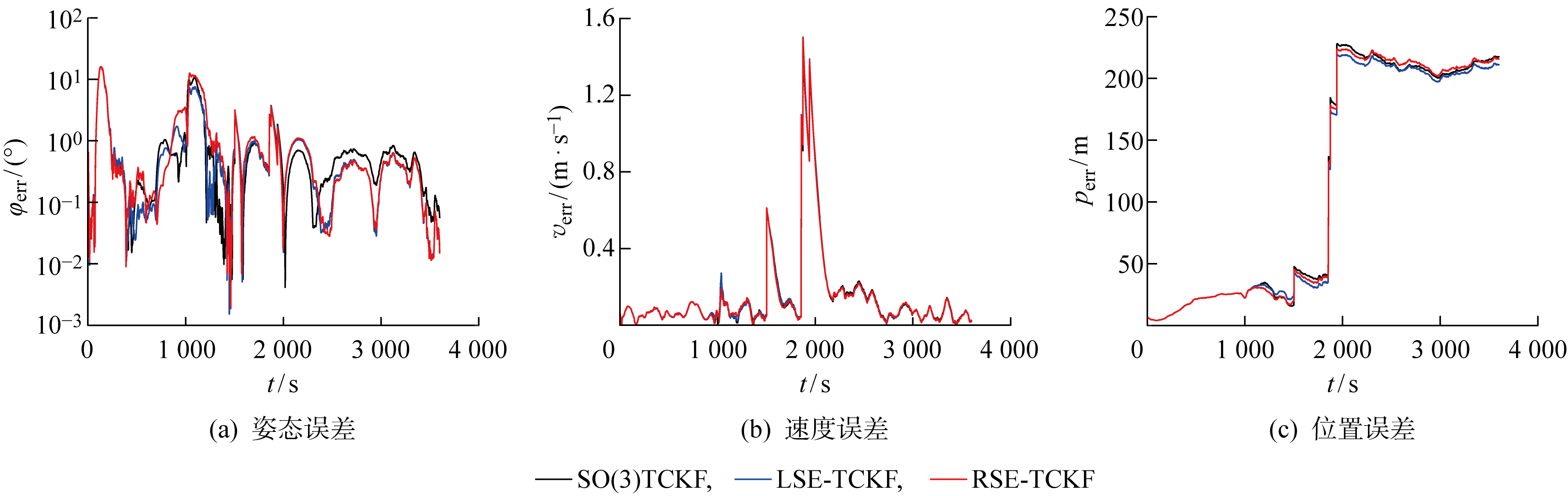

Fig.5
Navigation error at a misalignment angle of (5°, 5°, 10°)
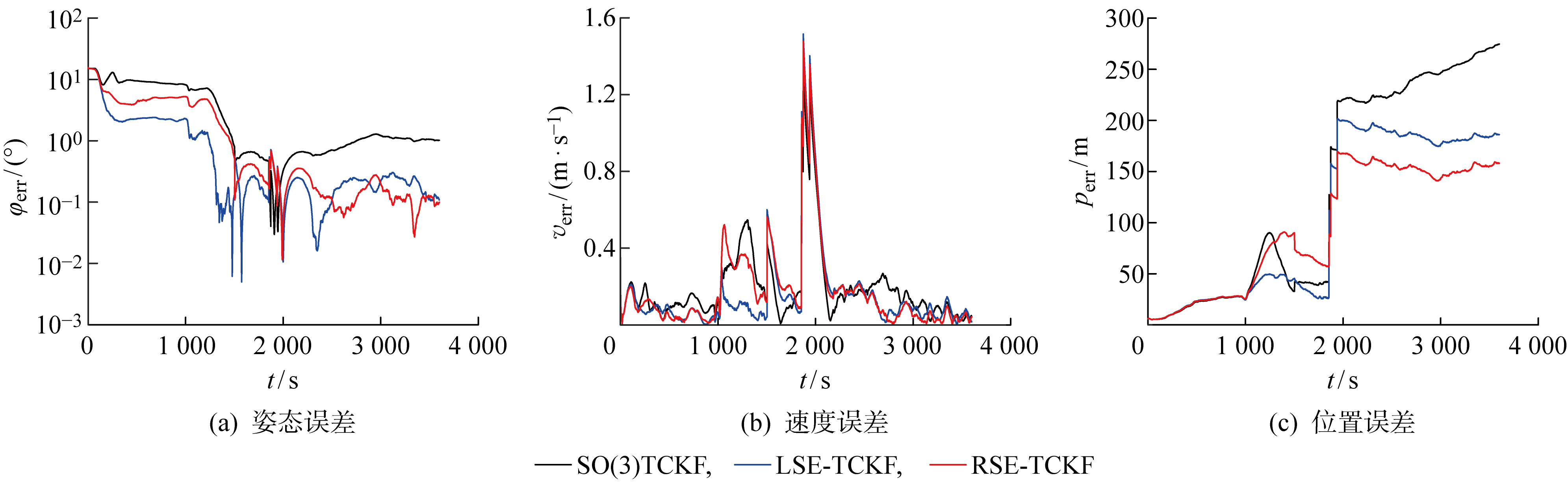

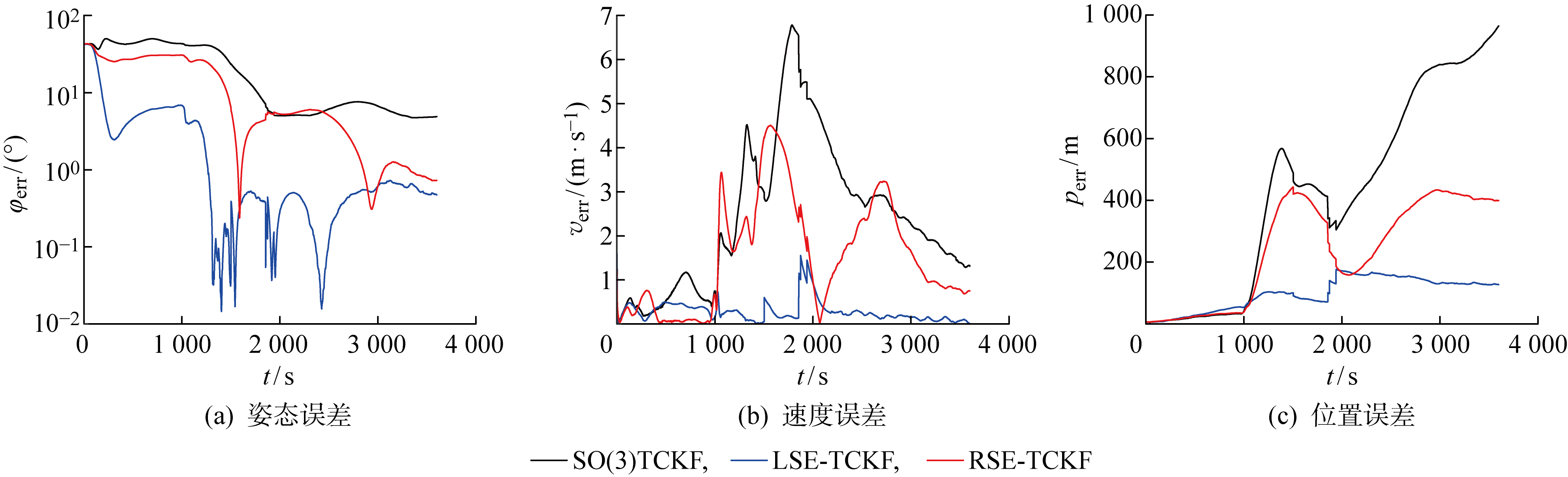
Fig.6
Navigation error at a misalignment angle of (25°, 25°, 25°)
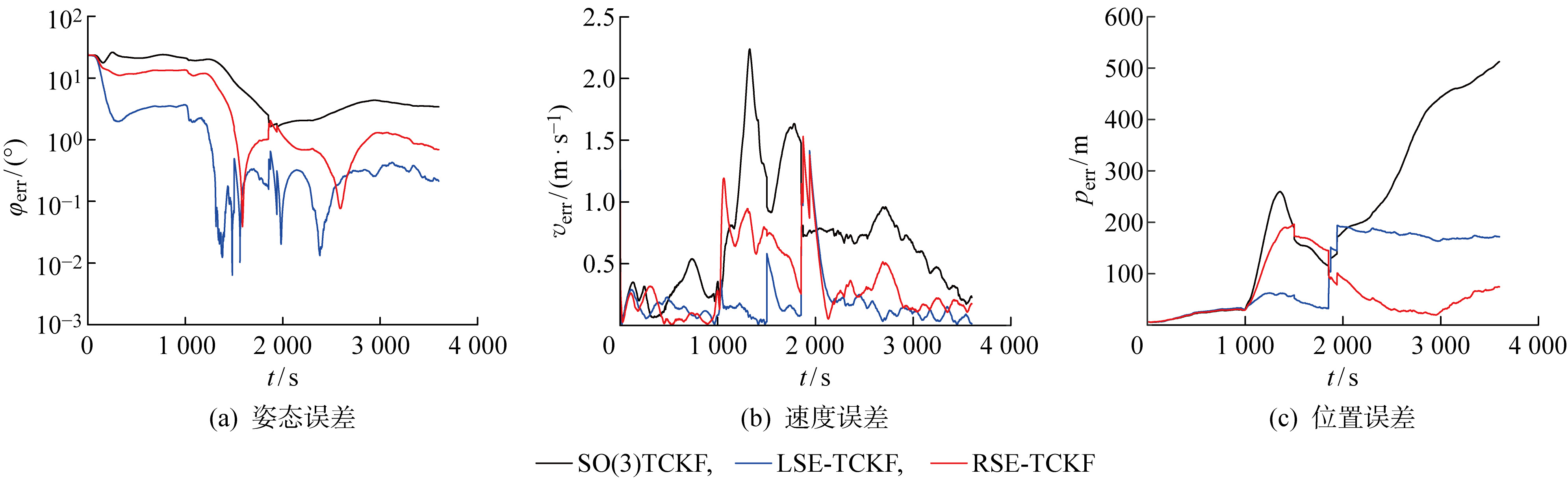

Fig.7
Navigation error at a misalignment angle of (30°, 30°, 45°)
Tab.2
RMSE at a misalignment angle of (0°, 0°, 0°)
| 类别 | 姿态误差/(°) | 速度误差/ (m·s-1) | 位置误差/m |
|---|---|---|---|
| SO(3)TCKF | 0.439 8 | 0.270 1 | 148.147 7 |
| LSE-TCKF | 0.406 3 | 0.272 6 | 145.222 0 |
| RSE-TCKF | 0.489 8 | 0.270 5 | 148.556 2 |
Tab.3
RMSE at a misalignment angle of (5°, 5°, 10°)
| 类别 | 姿态误差/(°) | 速度误差/ (m·s-1) | 位置误差/m |
|---|---|---|---|
| SO(3)TCKF | 5.721 6 | 0.282 3 | 168.388 0 |
| LSE-TCKF | 2.886 4 | 0.280 0 | 130.768 1 |
| RSE-TCKF | 3.762 9 | 0.291 6 | 112.626 6 |
Tab.4
RMSE at a misalignment angle of (25°, 25°, 25°)
| 类别 | 姿态误差/(°) | 速度误差/ (m·s-1) | 位置误差/m |
|---|---|---|---|
| SO(3)TCKF | 13.796 0 | 0.825 2 | 267.466 8 |
| LSE-TCKF | 4.441 3 | 0.294 8 | 124.607 7 |
| RSE-TCKF | 8.349 5 | 0.461 9 | 83.175 3 |
Tab.5
RMSE at a misalignment angle of (30°, 30°, 45°)
| 类别 | 姿态误差/(°) | 速度误差/ (m·s-1) | 位置误差/m |
|---|---|---|---|
| SO(3)TCKF | 28.539 2 | 2.945 7 | 530.985 0 |
| LSE-TCKF | 8.267 5 | 0.368 1 | 111.966 1 |
| RSE-TCKF | 18.539 6 | 1.976 3 | 291.014 9 |
Tab.6
Percentage improvement in accuracy of LSE-TCKF and RSE-TCKF compared to SO(3)TCKF at variations in misalignment angle
| 失准角 | 算法 | 姿态精度提升比例/% | 速度精度提升比例/% | 位置精度提升比例/% |
|---|---|---|---|---|
| (5°, 5°, 10°) | LSE-TCKF | 49.55 | -3.29 | 22.34 |
| (5°, 5°, 10°) | RSE-TCKF | 34.23 | 0.81 | 33.11 |
| (25°, 25°, 25°) | LSE-TCKF | 67.81 | 64.28 | 53.41 |
| (25°, 25°, 25°) | RSE-TCKF | 39.48 | 44.03 | 68.91 |
| (30°, 30°, 45°) | LSE-TCKF | 71.03 | 87.51 | 78.91 |
| (30°, 30°, 45°) | RSE-TCKF | 35.04 | 32.91 | 45.19 |

Fig.8
Comparison of navigation errors of different improvement strategies
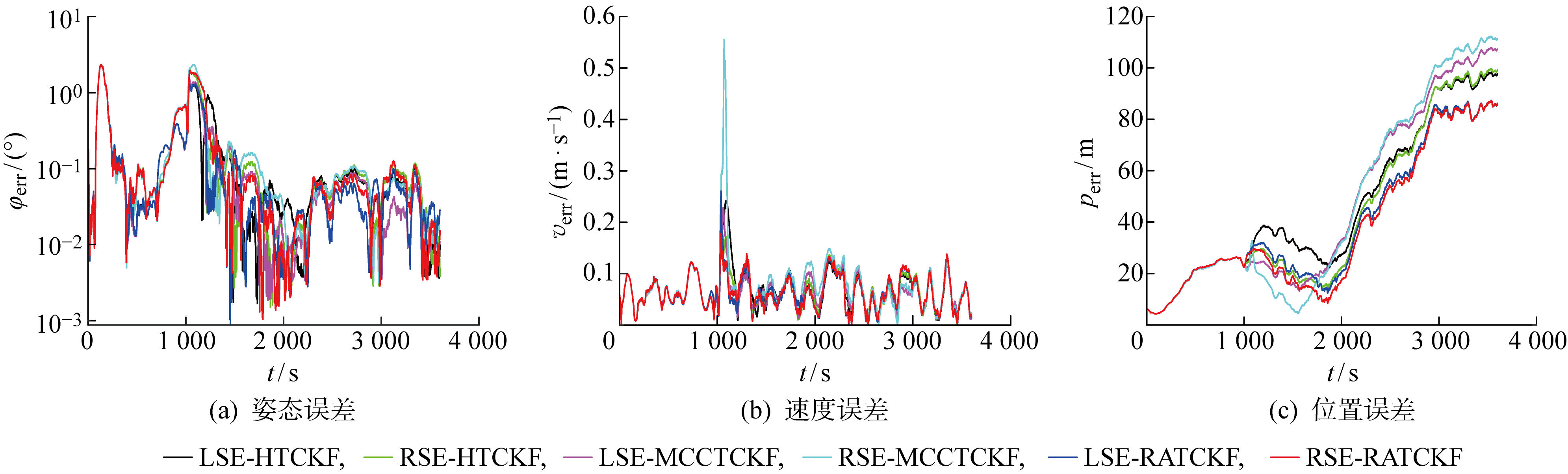
Tab.7
RMSE of different improvement strategies
| 类别 | 姿态误差/(°) | 速度误差/ (m·s-1) | 位置误差/m |
|---|---|---|---|
| LSE-HTCKF | 0.395 9 | 0.077 6 | 54.716 3 |
| RSE-HTCKF | 0.454 4 | 0.074 1 | 53.266 1 |
| LSE-MCCTCKF | 0.401 0 | 0.073 3 | 58.292 8 |
| RSE-MCCTCKF | 0.519 3 | 0.091 8 | 59.957 5 |
| LSE-RATCKF | 0.388 5 | 0.071 3 | 48.036 3 |
| RSE-RATCKF | 0.474 8 | 0.071 1 | 46.755 7 |
| [1] |
高红莲, 尤杰, 曹松银. 基于PF-UKF组合滤波的SINS/GPS组合导航系统空中对准方法[J]. 上海交通大学学报, 2022, 56(11): 1447-1452.
doi: 10.16183/j.cnki.jsjtu.2022.167 |
| GAO Honglian, YOU Jie, CAO Songyin. In-flight alignment method of integrated SINS/GPS navigation system based on combined PF-UKF filter[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1447-1452. | |
| [2] |
ZHU J, LI A, QIN F, et al. A new robust adaptive filter aided by machine learning method for SINS/DVL integrated navigation system[J]. Sensors, 2022, 22(10): 3792-3813.
doi: 10.3390/s22103792 URL |
| [3] |
YAR Y, XU X, YANG D, et al. An IMM-UKF aided SINS/USBL calibration solution for underwater vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69(4): 3740-3747.
doi: 10.1109/TVT.25 URL |
| [4] |
NORDIN M H, SHARMA S, KHAN A, et al. Collaborative unmanned vehicles for inspection, maintenance, and repairs of offshore wind turbines[J]. Drones, 2022, 6(6): 137-163.
doi: 10.3390/drones6060137 URL |
| [5] |
GAN W, ZHU D, JI D. QPSO-model predictive control-based approach to dynamic trajectory tracking control for unmanned underwater vehicles[J]. Ocean Engineering, 2018, 158: 208-220.
doi: 10.1016/j.oceaneng.2018.03.078 URL |
| [6] |
张文佳, 马辛. 深空探测器接近段自主导航的滑动窗口自适应滤波方法[J]. 上海交通大学学报, 2022, 56(11): 1461-1469.
doi: 10.16183/j.cnki.jsjtu.2022.233 |
| ZHANG Wenjia, MA Xin. A sliding window adaptive filtering algorithm for autonomous navigation of the approach phase of deep space probe[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1461-1469. | |
| [7] |
姜俊豪, 陈刚. 驾驶机器人转向操纵的动态模型预测控制方法[J]. 上海交通大学学报, 2022, 56(5): 594-603.
doi: 10.16183/j.cnki.jsjtu.2021.108 |
| JIANG Junhao, CHEN Gang. Dynamic model predictive control method for steering control of driving robot[J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 594-603. | |
| [8] |
ZHAO W, ZHAO H, LIU G, et al. ANFIS-EKF-based single-beacon localization algorithm for AUV[J]. Remote Sensing, 2022, 14(20): 5281-5301.
doi: 10.3390/rs14205281 URL |
| [9] |
AL B N, GAVRILOV A. A novel approach for aiding unscented Kalman filter for bridging GNSS outages in integrated navigation systems[J]. Navigation, 2021, 68(3): 521-539.
doi: 10.1002/navi.v68.3 URL |
| [10] |
YANG J, GAO S, LI G, et al. An adaptive cubature Kalman filtering algorithm based on variational mode decomposition for pulsar navigation[J]. IET Communications, 2022, 16(16): 1982-1992.
doi: 10.1049/cmu2.v16.16 URL |
| [11] | 秦康, 董新民, 陈勇, 等. 基于正交变换的改进CKF算法[J]. 控制与决策, 2018, 33(2): 330-336. |
| QIN Kang, DONG Xinmin, CHEN Yong, et al. Modified CKF algorithm based on orthogonal transformation[J]. Control and Decision, 2018, 33(2): 330-336. | |
| [12] |
赵丽, 薛建平. 基于采样点正交变换的改进CKF算法[J]. 计算机工程与应用, 2018, 54(18): 45-51.
doi: 10.3778/j.issn.1002-8331.1707-0344 |
|
ZHAO Li, XUE Jianping. Improved CKF based on orthogonal transformation[J]. Computer Engineering and Applications, 2018, 54(18): 45-51.
doi: 10.3778/j.issn.1002-8331.1707-0344 |
|
| [13] | 严恭敏, 严卫生, 徐德民. 基于欧拉平台误差角的SINS非线性误差模型研究[J]. 西北工业大学学报, 2009, 27(4): 511-516. |
| YAN Gongmin, YAN Weisheng, XU Demin. A SINS nonlinear error model reflecting better characteristics of SINS errors[J]. Journal of Northwestern Polytechnical University, 2009, 27(4): 511-516. | |
| [14] | 王茂松, 吴文启, 何晓峰, 等. 状态变换卡尔曼滤波的进一步解释及应用[J]. 中国惯性技术学报, 2019, 27(4): 499-504. |
| WANG Maosong, WU Wenqi, HE Xiaofeng, et al. Further explanation and application of state transformation extended Kalman filter[J]. Journal of Chinese Inertial Technology, 2019, 27(4): 499-504. | |
| [15] |
ISERLES A, MUNTHE K H Z, NORSETT S P, et al. Lie-group methods[J]. Acta Numerica, 2000, 9: 215-365.
doi: 10.1017/S0962492900002154 URL |
| [16] |
CUI J, WANG M, WU W, et al. Lie group based nonlinear state errors for MEMS-IMU/GNSS/magnetometer integrated navigation[J]. Journal of Navigation, 2021, 74(4): 887-900.
doi: 10.1017/S037346332100014X URL |
| [17] |
CHANG L, DI J, QIN F. Inertial based integration with transformed INS mechanization in earth frame[J]. IEEE/ASME Transactions on Mechatronics. 2021, 27: 1738-1749.
doi: 10.1109/TMECH.2021.3090428 URL |
| [18] |
QIAN L, QIN F, LI K, et al. Research on the necessity of lie group strapdown inertial integrated navigation error model based on Euler angle[J]. Sensors, 2022, 22(20): 7742-7761.
doi: 10.3390/s22207742 URL |
| [19] |
AXEL B, SILVERE B. Invariant Kalman filtering[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2018, 1(1): 237-257.
doi: 10.1146/control.2018.1.issue-1 URL |
| [20] |
LUO Y, GUO C, LIU J. Equivariant filtering framework for inertial-integrated navigation[J]. Satellite Navigation. 2021, 2: 1-17.
doi: 10.1186/s43020-020-00033-9 |
| [21] |
WANG M, WU W, ZHOU P, et al. State transformation extended Kalman filter GPS/SINS tightly coupled integration[J]. GPS Solution. 2018, 22: 1-12.
doi: 10.1007/s10291-017-0674-x URL |
| [22] | DU S, HUANG Y, LIN B, et al. A lie group manifold-based nonlinear estimation algorithm and its application to low-accuracy SINS/GNSS integrated navigation[J]. IEEE Transactions on Instrumentation and Measurement. 2022, 71: 1-27. |
| [23] |
ZHU T, LI A, LI K, et al. The quaternion based error model based on SE(3) of the INS[J]. IEEE Sensors Journal, 2022, 22(13): 13067-13077.
doi: 10.1109/JSEN.2022.3174596 URL |
| [24] | FAN X, WANG G, HAN J, et al. Interacting multiple model based on maximum correntropy Kalman filter[J]. IEEE Transactions on Circuits and Systems II—Express Briefs, 2021, 68(8): 3017-3021. |
| [25] |
ZHU B, CHANG L, XU J, et al. Huber-based adaptive unscented Kalman filter with non-Gaussian measurement noise[J]. Circuits, Systems, and Signal Processing, 2018, 37(9): 3842-3861.
doi: 10.1007/s00034-017-0736-x |
| [26] | 张文杰, 王世元, 冯亚丽, 等. 基于Huber的高阶容积卡尔曼跟踪算法[J]. 物理学报, 2016, 65(8): 358-366. |
| ZHANG Wenjie, WANG Shiyuan, FENG Yali, et al. Huber-based high-degree cubature Kalman tracking algorithm[J]. Acta Physica Sinica, 2016, 65(8): 358-366. | |
| [27] | 黄玉, 武立华, 孙枫. 基于Huber M估计的鲁棒Cubature卡尔曼滤波算法[J]. 控制与决策, 2014, 29(3): 572-576. |
| HUANG Yu, WU Lihua, SUN Feng. Robust Cubature Kalman filter based on Huber M estimator[J]. Control and Decision, 2014, 29(3): 572-576. | |
| [28] | CANTELOBRE T, CHAHBAZIAN C, CROUX A, et al. A real-time unscented Kalman filter on manifolds for challenging AUV navigation[C]// 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Providence, Las Vegas, NV, USA: IEEE, 2020: 2309-2316. |
| [29] |
LUO L, ZHANG Y, FANG T, et al. A new robust Kalman filter for SINS/DVL integrated navigation system.[J]. IEEE Access, 2019, 7: 51386-51395.
doi: 10.1109/ACCESS.2019.2911110 |
| [30] |
朱天高, 刘勇, 李开龙, 等. 基于欧拉角的李群捷联惯导误差模型分析与比较研究[J]. 系统工程与电子技术, 2023, 45(10): 3265-3273.
doi: 10.12305/j.issn.1001-506X.2023.10.31 |
|
ZHU Tiangao, LIU Yong, LI Kailong, et al. Analysis and comparison of Euler angles based error model based on Lie groups of the SINS[J]. Systems Engineering and Electronics, 2023, 45(10): 3265-3273.
doi: 10.12305/j.issn.1001-506X.2023.10.31 |
|
| [31] |
HUBER P J. Robust estimation of a location parameter[J]. The Annals of Mathematical Statistics, 1964, 35(1): 73-101.
doi: 10.1214/aoms/1177703732 URL |
| [32] |
HOU J, HE H, YANG Y, et al. A variational Bayesian and Huber-based robust square root cubature Kalman filter for lithium-ion battery state of charge estimation[J]. Energies, 2019, 12(9): 1717-1739.
doi: 10.3390/en12091717 URL |
| [1] |
Wang Yafeng, Huang Peishuo, , Yu Xiaqiong, Song Lei, Yu Wenbin.
Processing of Beidou Positioning Error in the Integrated Navigation for Use At Sea [J]. Ocean Engineering Equipment and Technology, 2023, 10(3): 76-82. |
| [2] | GAO Honglian, YOU Jie, CAO Songyin. In-Flight Alignment Method of Integrated SINS/GPS Navigation System Based on Combined PF-UKF Filter [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1447-1452. |
| [3] | HU Xiaoqiang,ZHONG Xunyu,ZHANG Xiaoli,PENG Xiafu,HE Ying. A Two-Level Fault Diagnosis Method for Gyro-Quadruplet Assisted by Support Vector Machine [J]. Journal of Shanghai Jiaotong University, 2020, 54(11): 1151-1156. |
| [4] | FU Tingqiang,MA Taiyuan,WANG Yafei,YIN Chengliang. GPS/INS Delay Estimation and Delay Compensation Based on Residual Reconstruction [J]. Journal of Shanghai Jiaotong University, 2019, 53(10): 1210-1217. |
| [5] | WANG Lina1,2,HUANG Bin3,GAO Xiaoying2,KANG Guohua3,SUN Yongrong3. Fusion Filtering Method Guided by Measurement Information in Integrated Navigation System [J]. Journal of Shanghai Jiaotong University, 2015, 49(09): 1394-1399. |
| [6] | ZHU Lixin,MA Chunlai,MENG Yan. Application of IMM-SRUKF to GPS/INS Integrated Navigation [J]. Journal of Shanghai Jiaotong University, 2014, 48(03): 346-350. |
| [7] | XU Jianguo,ZHANG Zhili,ZHOU Zhaofa. Application of Interactive Map Matching Algorithm in SINS/Odometer Integrated Navigation [J]. Journal of Shanghai Jiaotong University, 2013, 47(08): 1323-1328. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||