Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (2): 111-116.doi: 10.16183/j.cnki.jsjtu.2020.005
Special Issue: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
LIU Jiapeng, WANG Jiangbei, DING Ye, FEI Yanqiong( )
)
Received:2020-01-03
Online:2021-02-01
Published:2021-03-03
Contact:
FEI Yanqiong
E-mail:fyq@sjtu.edu.cn
CLC Number:
LIU Jiapeng, WANG Jiangbei, DING Ye, FEI Yanqiong. Self-Reconfiguration Sequence of Lattice Modular Soft Robots[J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 111-116.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.005
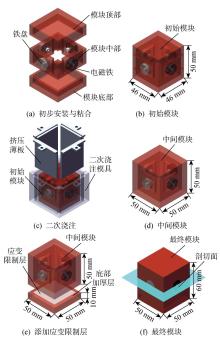
Fig.1
Manufacturing process of soft module


Fig.2
Section design diagram of soft module
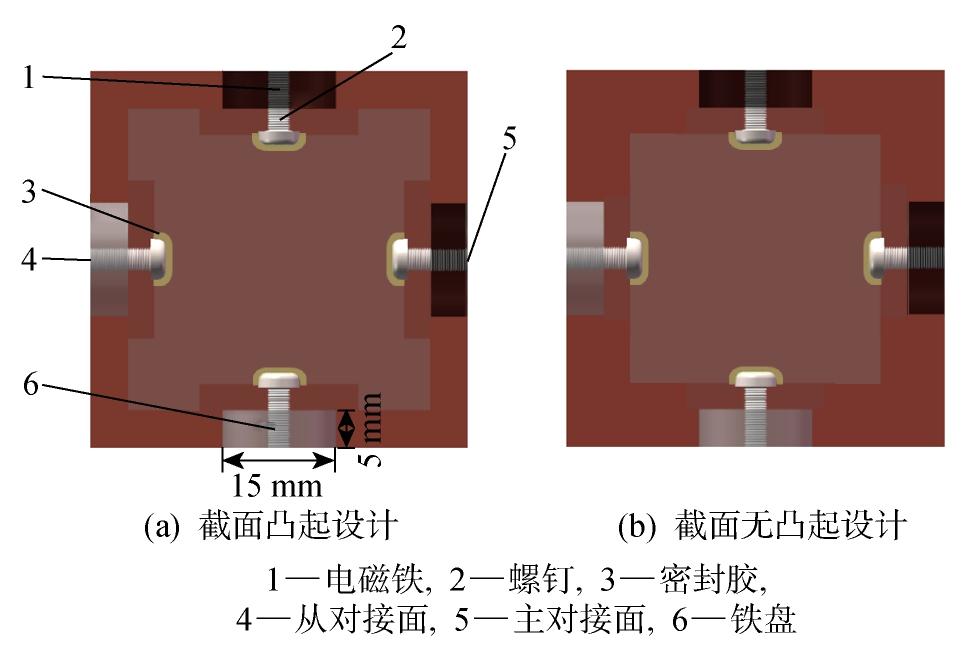
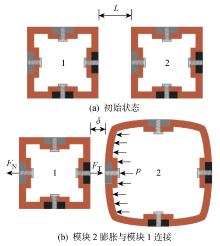
Fig.3
Connection diagram between soft modules
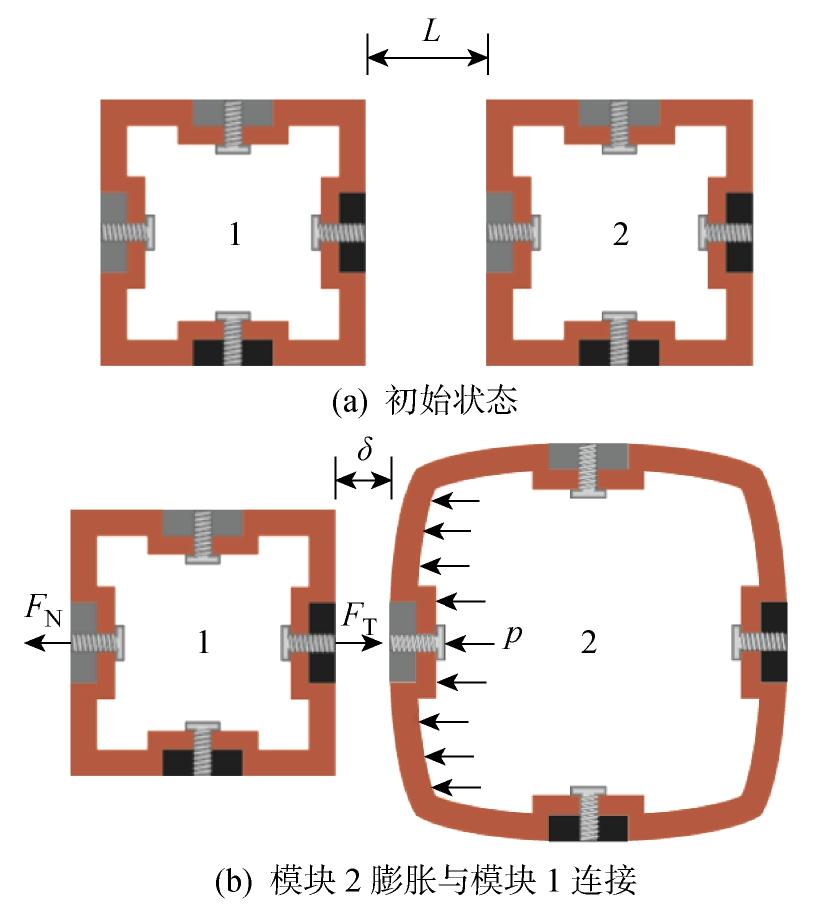
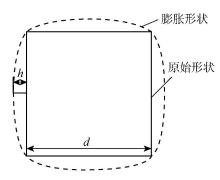
Fig.4
Diagram of expansion shape change of soft module 2
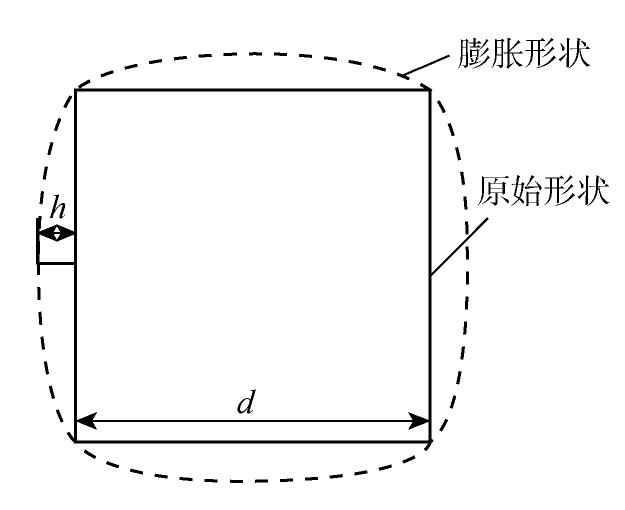
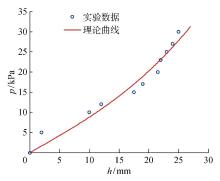
Fig.5
p versush
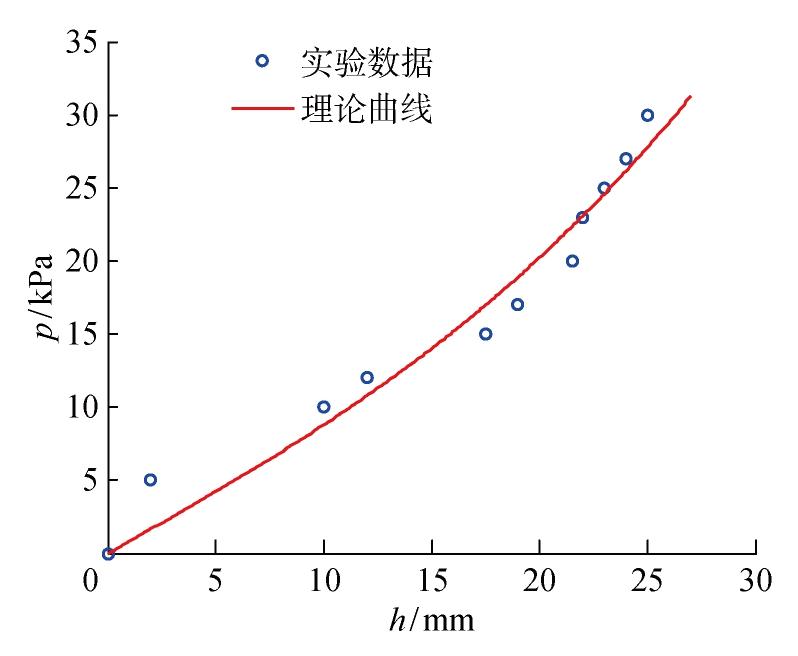
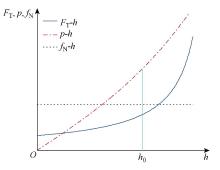
Fig.6
Soft module connection analysis diagram
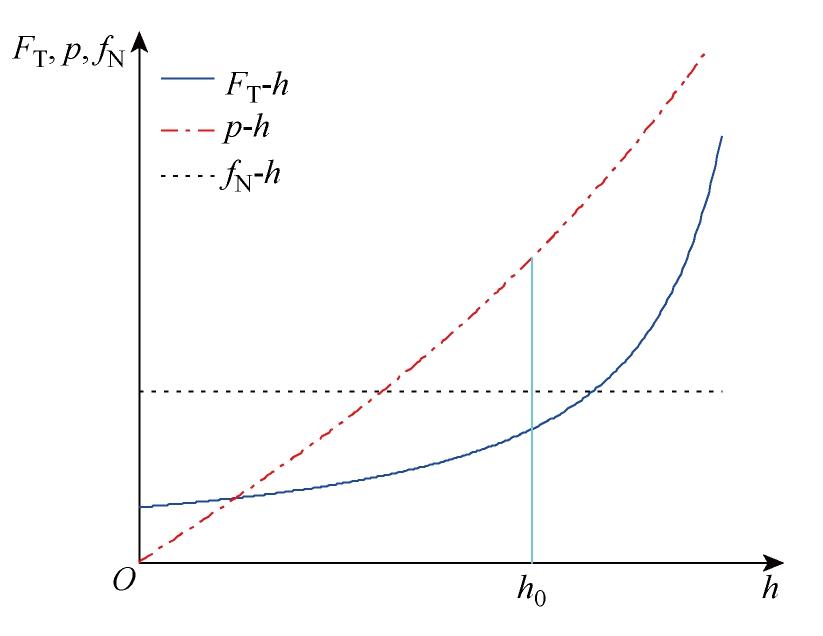
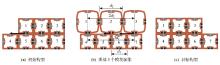
Fig.7
Self-reconfiguration method of soft robot
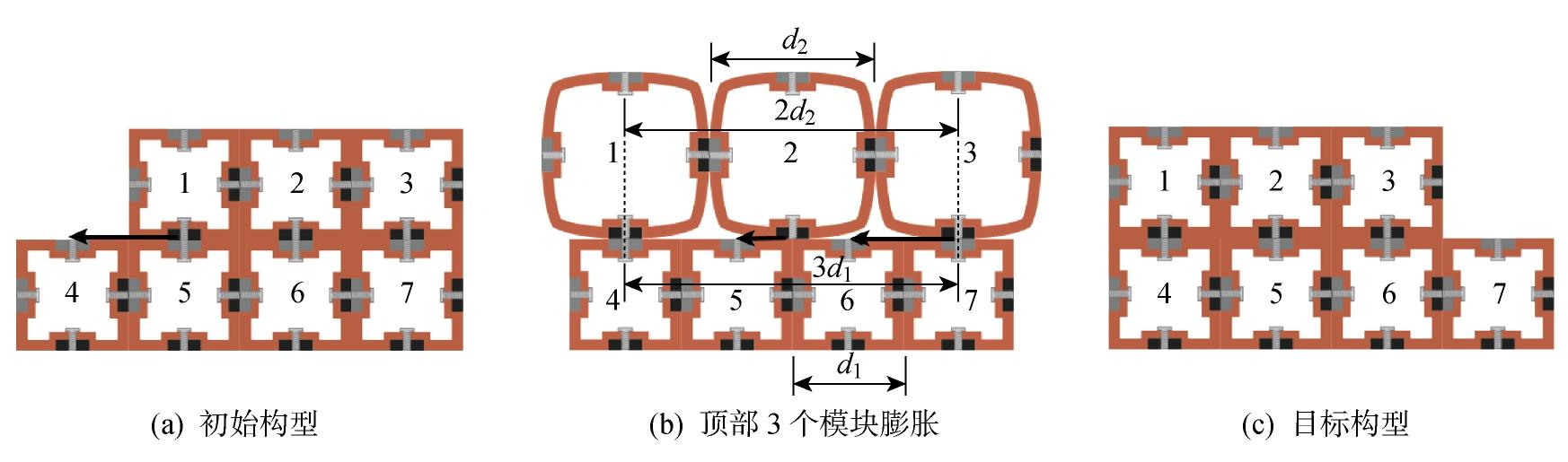
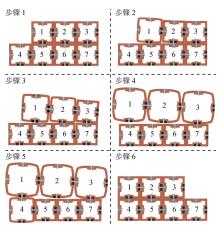
Fig.8
Self-reconfiguration sequence of soft robot
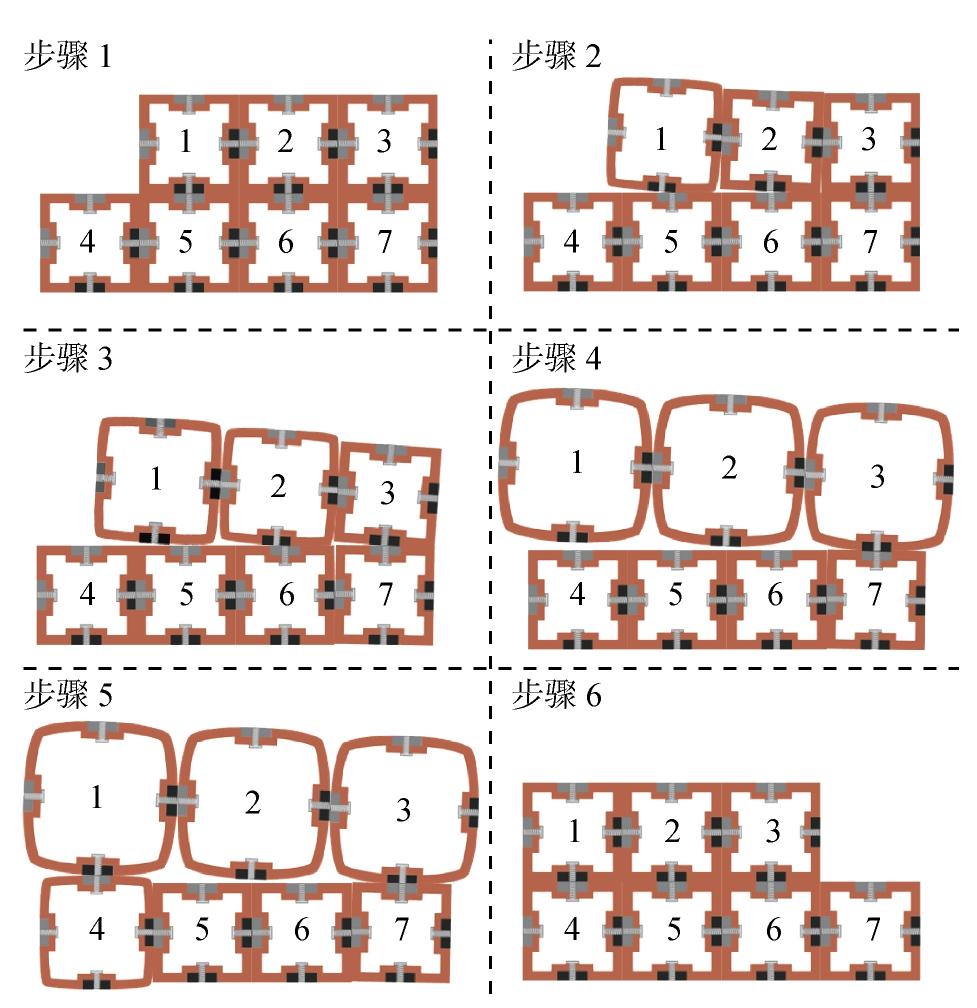

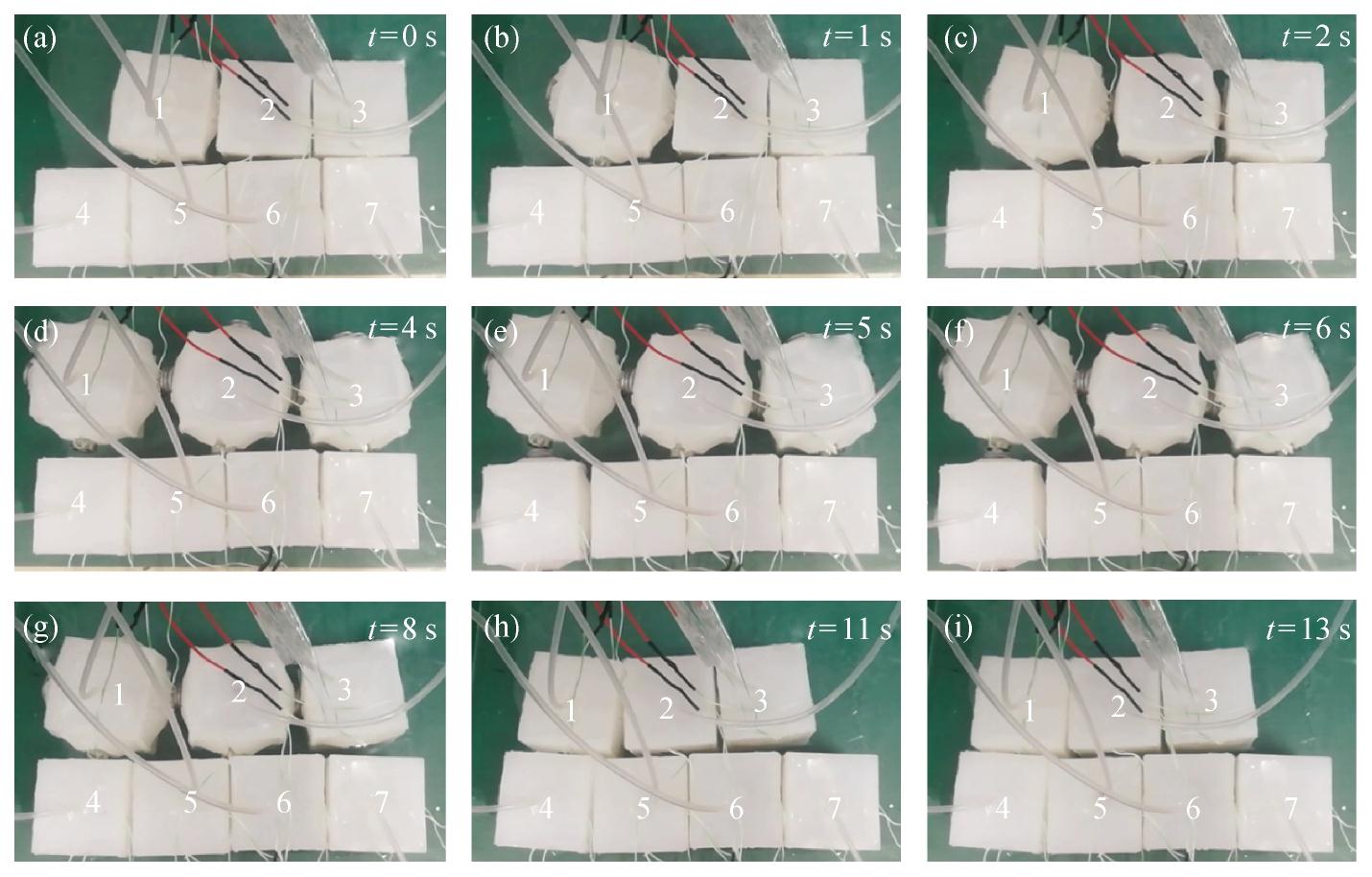
Fig.9
Self-reconfiguration experiment of soft robot
| [1] | 侯涛刚,王田苗,苏浩鸿,等. 软体机器人前沿技术及应用热点[J]. 科技导报,2017, 35(18): 20-28. |
| HOU Taogang, WANG Tianmiao, SU Haohong, et al. Review on soft-bodied robots[J]. Science & Technology Review, 2017, 35(18): 20-28. | |
| [2] | 李卓雨. 软体机器人的发展应用与展望[J]. 科技传播,2018, 10(23): 109-110. |
| LI Zhuoyu. Development, application and prospect of soft robots[J]. Public Communication of Science & Technology, 2018, 10(23): 109-110. | |
| [3] | GERMANN J, DOMMER M, PERICET-CAMARA R, et al. Active connection mechanism for soft modular robots[J]. Advanced Robotics, 2012, 26(7): 785-798. |
| [4] | KWOK S W, MORIN S A, MOSADEGH B, et al. Magnetic assembly of soft robots with hard components[J]. Advanced Functional Materials, 2014, 24(15): 2180-2187. |
| [5] | NEMITZ M P, MIHAYLOV P, BARRACLOUGH T W, et al. Using voice coils to actuate modular soft robots: Wormbot, an example[J]. Soft Robotics, 2016, 3(4): 198-204. |
| [6] | VERGARA A, LAU Y S, MENDOZA-GARCIA R F, et al. Soft modular robotic cubes: Toward replicating morphogenetic movements of the embryo[J]. PLOS One, 2017, 12(1): 1-17. |
| [7] | ZOU J, LIN Y Q, JI C, et al. A reconfigurable omnidirectional soft robot based on caterpillar locomotion[J]. Soft Robotics, 2018, 5(2): 164-174. |
| [8] | 王羽麟. 可重构软体模块化机器人研制及其运动控制研究[D]. 哈尔滨: 哈尔滨工业大学,2018. |
| WANG Yulin. Development and motion control strategy research of soft reconfigurable modular robots[D]. Harbin: Harbin Institute of Technology, 2018. | |
| [9] | RUS D, VONA M. A physical implementation of the self-reconfiguring crystalline robot[C]∥IEEE International Conference on Robotics and Automation. Symposia Proceedings. Piscataway, NJ, USA: IEEE, 2000: 1726-1733. |
| [10] | 钱家骊. 电磁铁吸力公式的讨论[J]. 电工技术杂志,2001, 20(1): 59-60. |
| QIAN Jiali. Discussion on the suction formula of electromagnet[J]. Electrotechnical Journal, 2001, 20(1): 59-60. | |
| [11] | 陈安科. 线性电磁力控制系统试验和研究[D]. 重庆: 重庆大学,2012. |
| CHEN Anke. Research on the control system of linear electromagnetic force[D]. Chongqing: Chongqing University, 2012. |
| [1] | Siavash Iravani, Rajender S. Varma. MXenes for Bioinspired Soft Actuators: Advancements in Angle-Independent Structural Colors and Beyond [J]. Nano-Micro Letters, 2024, 16(1): 142-. |
| [2] | LI Ru1 (李茹), CHEN Fang2 (陈方), YU Wenwei3 (俞文伟), IGARASH Tatsuo3,4, SHU Xiongpeng1 (舒雄鹏), XIE Le1,5,6∗ (谢叻). A Novel Cable-Driven Soft Robot for Surgery [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(1): 60-72. |
| [3] | LI Linlin (李林霖), GAO Feiyang (高飞扬), ZHENG Xiongfei(郑雄飞), ZHANG Liming(张黎明), LI Shijie (李世杰), WANG Heran(王赫然). Enhancement of Pinching Grasping Robustness Using a Multi-Structure Soft Gripper [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(3): 307-311. |
| [4] | ZHAO Yafei (赵亚飞), HUANG Chaoyi (黄超逸), ZOU Yuging(邹玉莹), ZOUKehan(邹可涵), zoU Xiaogang(邹笑阳), XUE .Jiaqi(薛嘉琦), LI Xiaoting(李晓婷), KOH Keng Huat, WANG Xiaojun(王小军), LAI Wai Chiu King(赖伟超), HU Yong(胡勇), XI Ning(席宁), WANG Zheng(王峥). Integrated Hydraulic-Driven Wearable Robot for Knee Assistance [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(3): 289-295. |
| [5] | WANG Yuxuan, LIU Zhaoyu, WANG Jiangbei, FEI Yanqiong. Dual Modular Soft Robot with Multi-Terrain Movement Ability [J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1388-1396. |
| [6] | ZHANG Liwen, XU Qiping, LIU Jinyang. Modeling and Simulation of an Inchworm-Like Soft Robot [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 149-160. |
| [7] | LI Yong, ZHANG Mengjun, QIU Dong, FAN Yunfeng . Design and Development of Data-Driven Augmented Reality Electronic Sand Table for Command and Control System [J]. Air & Space Defense, 2021, 4(2): 27-33. |
| [8] | YI Canming,YU Haidong,WANG Hao. Dynamic Behavior of Coupled Flexible Plate Structure with Piezoelectric Actuator via Absolute Nodal Coordinate Formulation [J]. Journal of Shanghai Jiaotong University, 2019, 53(6): 665-672. |
| [9] | HE Yuntao1,KONG Bo2,3,XI Xiaobing2,3,LUO Yun1. Design and Evaluation of a Novel Splint Used in Distal Radius Fracture [J]. Journal of Shanghai Jiao Tong University, 2018, 52(2): 194-199. |
| [10] | WANG Jiangbei,FANG Yeyang,TONG Xin,ZHANG Shuai,FEI Yanqiong. Design and Locomotion Properties of a Multi-Airbag Bionic Soft Robot [J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 20-25. |
| [11] | FEI Yanqiong,LV Haiyang,SHEN Xinyao. Moving Mode of Modular Soft Robot [J]. Journal of Shanghai Jiaotong University, 2013, 47(12): 1870-1873. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||