上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (S1): 114-123.doi: 10.16183/j.cnki.jsjtu.2023.S1.25
于特1,2, 刘佳鹏1,2, 吴超3( ), 周畅1,2, 周胜增1,2, 王磊3
), 周畅1,2, 周胜增1,2, 王磊3
收稿日期:2023-05-14
修回日期:2023-06-14
接受日期:2023-07-18
出版日期:2023-10-28
发布日期:2023-11-10
通讯作者:
吴超
E-mail:wuchaorr@sjtu.edu.cn.
作者简介:于 特(1995-),助理工程师,从事水面水下无人航行器研究.
基金资助:
YU Te1,2, LIU Jiapeng1,2, WU Chao3(), ZHOU Chang1,2, ZHOU Shengzeng1,2, WANG Lei3
Received:2023-05-14
Revised:2023-06-14
Accepted:2023-07-18
Online:2023-10-28
Published:2023-11-10
Contact:
WU Chao
E-mail:wuchaorr@sjtu.edu.cn.
摘要:
面向水域探测场景的立体化、多样化、复杂化,基于领航-跟随编队控制的思想,提出了水面无人船(Unmanned Surface Vehicle,USV)和自主水下无人航行器(Autonomous Underwater Vehicle,AUV)跨介质异构体协同运动控制策略.首先,该控制策略考虑了未知环境干扰等因素带来的动力学建模误差,设计了非线性干扰观测器用以估计误差影响;其次,利用动态自适应前视距离改进视线法(LOS),在制导层面解决AUV欠驱动控制问题,结合级联系统分析USV-AUV编队控制问题,通过反馈线性化设计AUV跟随控制器;最后,采用李雅普诺夫理论证明了基于改进制导律的USV-AUV编队控制系统的一致全局渐进稳定.湖试结果表明,所提出的USV-AUV编队控制策略是有效的.
中图分类号:
于特, 刘佳鹏, 吴超, 周畅, 周胜增, 王磊. 基于非线性干扰观测器的无人船与自主水下航行器协同运动控制策略[J]. 上海交通大学学报, 2023, 57(S1): 114-123.
YU Te, LIU Jiapeng, WU Chao, ZHOU Chang, ZHOU Shengzeng, WANG Lei. USV and AUV Cooperative Control Strategy Based on Nonlinear Disturbance Observer[J]. Journal of Shanghai Jiao Tong University, 2023, 57(S1): 114-123.
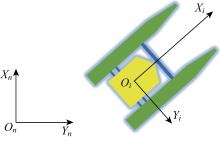
图1
USV坐标系定义
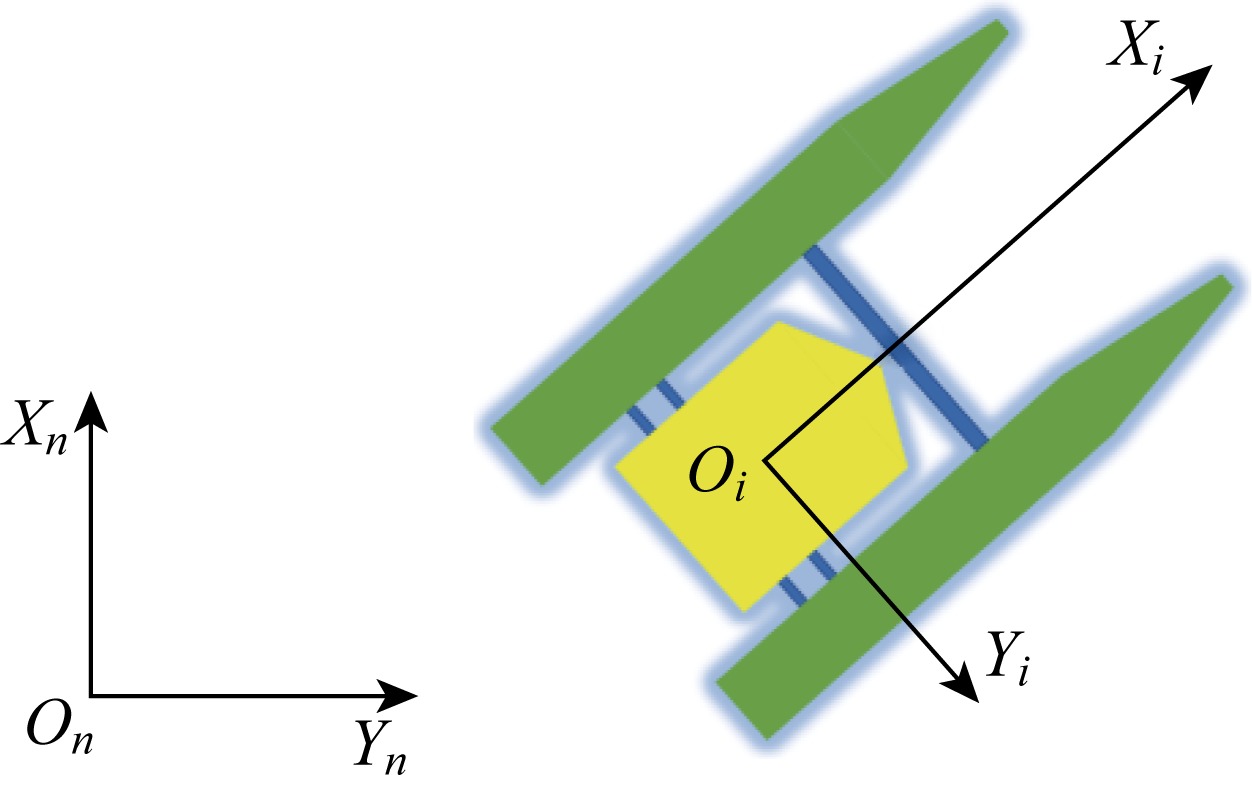
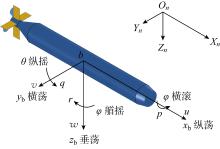
图2
AUV坐标系定义
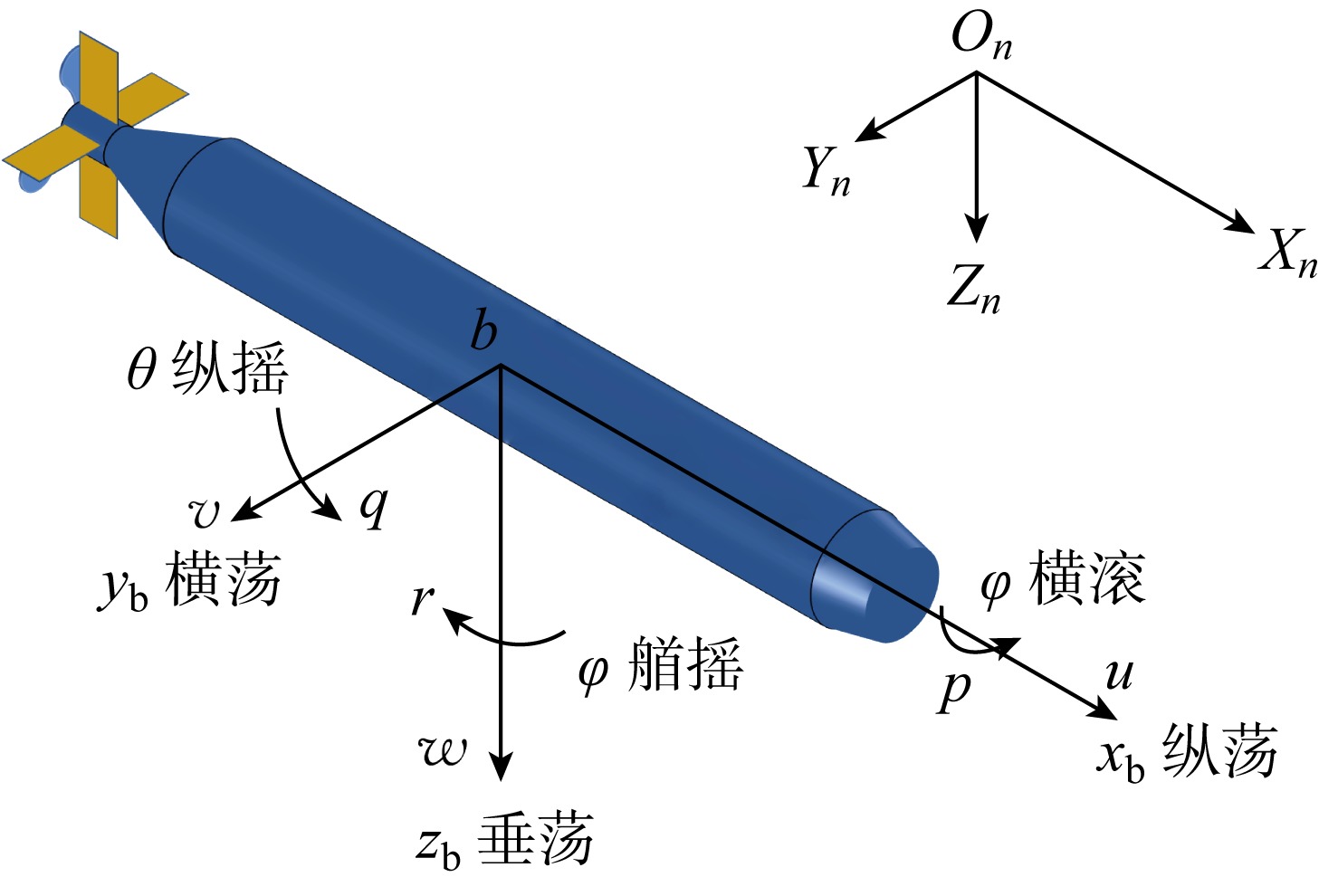
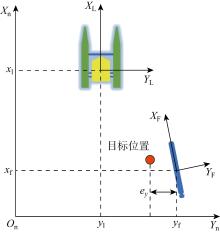
图3
USV-AUV编队位置构型
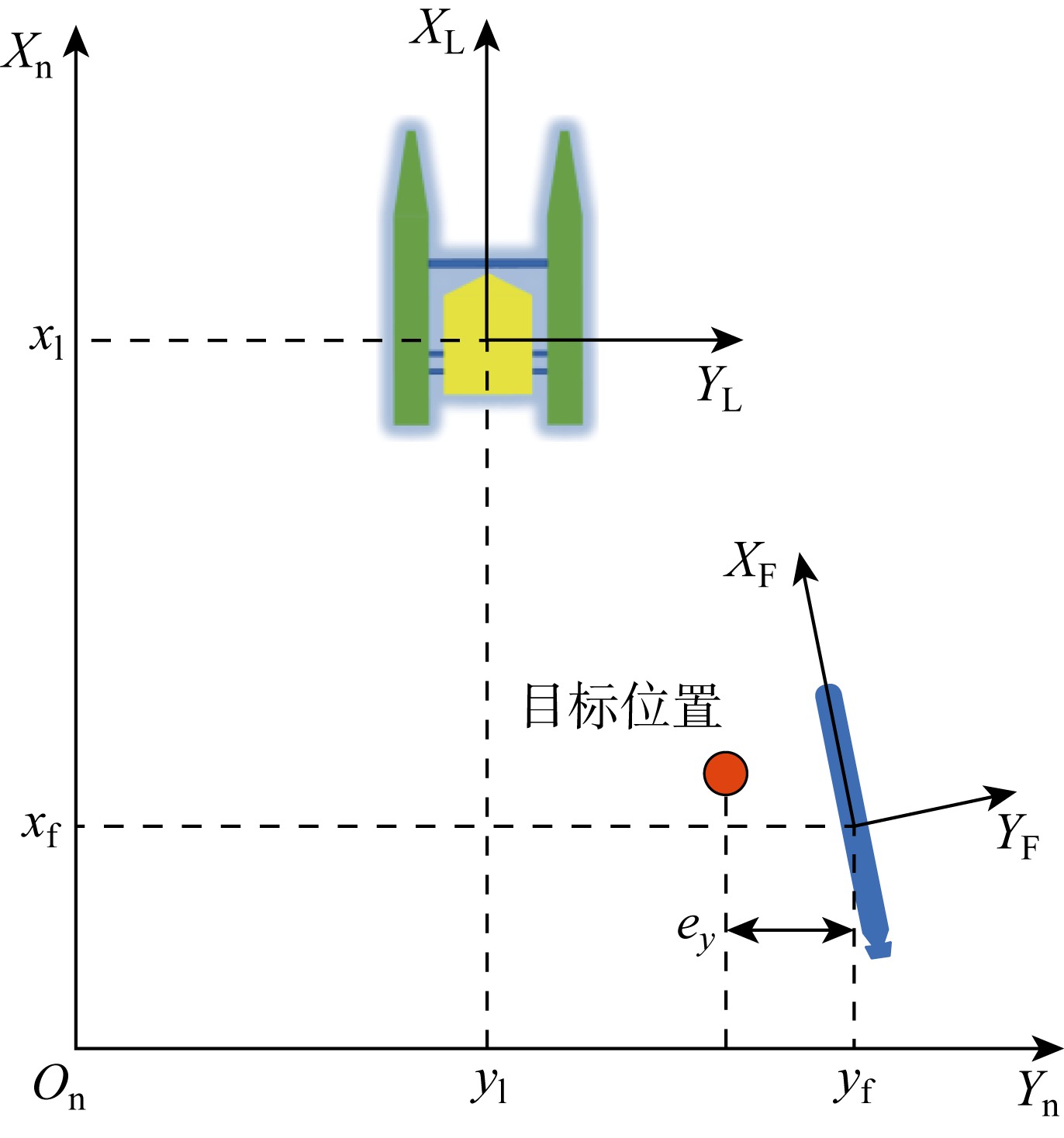

图4
USV湖试照片


图5
AUV湖试照片

图6
USV-AUV编队航行轨迹
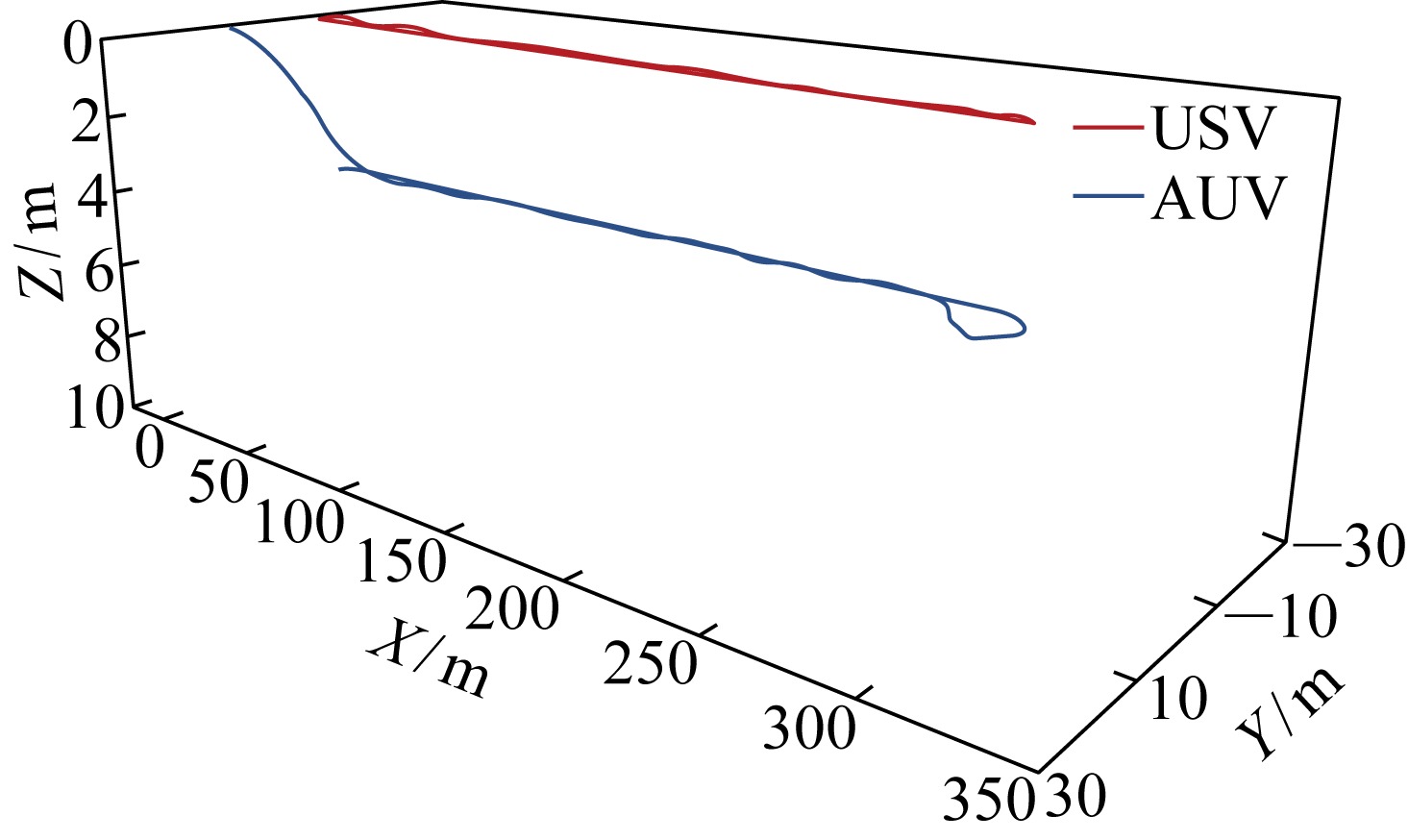

图7
AUV航行编队误差

| [12] |
QI X. Adaptive coordinated tracking control of multiple autonomous underwater vehicles[J]. Ocean Engineering, 2014, 91: 84-90.
doi: 10.1016/j.oceaneng.2014.08.019 URL |
| [13] |
YAN X, JIANG D, MIAO R, et al. Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field[J]. Journal of Marine Science and Engineering, 2021, 9(2): 161-178.
doi: 10.3390/jmse9020161 URL |
| [14] |
PARK B S, YOO S J. Connectivity-maintaining and collision-avoiding performance function approach for robust leader-follower formation control of multiple uncertain underactuated surface vessels[J]. Automatica, 2021, 127: 109501.
doi: 10.1016/j.automatica.2021.109501 URL |
| [15] | EDWARDS D B, BEAN T A, ODELL D L, et al. A leader-follower algorithm for multiple AUV formations[C]// 2004 IEEE/OES Autonomous Underwater Vehicles (IEEE Cat. No. 04CH37578). Sebasco, ME, USA: IEEE, 2004: 40-46. |
| [16] | ROUT R, SUBUDHI B. A backstepping approach for the formation control of multiple autonomous underwater vehicles using a leader-follower strategy[J]. Journal of Marine Engineering & Technology, 2016, 15(1): 38-46. |
| [17] |
CUI R, GE S S, HOW B V E, et al. Leader-follower formation control of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2010, 37(17-18): 1491-1502.
doi: 10.1016/j.oceaneng.2010.07.006 URL |
| [18] | 庞师坤, 王健, 易宏, 等. 基于传感探测系统的多自治水下机器人编队协调控制[J]. 上海交通大学学报, 2019, 53(5): 549-555. |
| PANG Shikun, WANG Jian, YI Hong, et al. Formation control of multiple autonomous underwater vehicles based on sensor measuring system[J]. Journal of Shanghai Jiao Tong University, 2019, 53(5): 549-555. | |
| [19] | ZHUANG Y, HAN X, HUANG H, et al. Dynamic area coverage with multi-USV in fully connected state using graph theory[C]// 2021 China Automation Congress (CAC). Beijing, China: IEEE, 2021: 7376-7382. |
| [20] | VANNI F, AGUIAR A P, PASCOAL A. Nonlinear motion control of multiple autonomous underwater vehicles[J]. IFAC Proceedings Volumes, 2007, 40(17): 75-80. |
| [21] |
SHOJAEI K. Leader-follower formation control of underactuated autonomous marine surface vehicles with limited torque[J]. Ocean Engineering, 2015, 105: 196-205.
doi: 10.1016/j.oceaneng.2015.06.026 URL |
| [22] | SOARES J M, AGUIAR A P, PASCOAL A M, et al. Joint ASV/AUV range-based formation control: Theory and experimental results[C]// 2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013: 5579-5585. |
| [23] | 李娟, 袁锐锟, 张宏瀚. 基于领航跟随法的多 AUV 编队控制算法研究[J]. 仪器仪表学报, 2022, 40(6): 237-246. |
| LI Juan, YUAN Ruikun, ZHANG Honghan. Research on multiple AUVs formation control algorithm based on leader-follower method[J]. Chinese Journal of Scientific Instrument, 2022, 40(6): 237-246. | |
| [24] | 徐博, 王朝阳. 基于无人艇跨域异构编队协同导航研究进展与未来趋势[J]. 中国舰船研究, 2022, 17(4): 1-11. |
| XU Bo, WANG Zhaoyang. Cooperative navigation of cross-domain heterogeneous unmanned ship formation: recent advances and future trends[J]. Chinese Journal of Ship Research, 2022, 17(4): 1-11. | |
| [25] | MCGILLIVARY P, DE SOUSA J B, MARTINS R, et al. Integrating autonomous underwater vessels, surface vessels and aircraft as persistent surveillance components of ocean observing studies[C]// 2012 IEEE/OES Autonomous Underwater Vehicles (AUV). Southampton, UK: IEEE, 2012: 1-5. |
| [26] | NORGREN P, LUDVIGSEN M, INGEBRETSEN T, et al. Tracking and remote monitoring of an autonomous underwater vehicle using an unmanned surface vehicle in the Trondheim Fjord[C]// OCEANS 2015-MTS/IEEE Washington. Washington D.C., USA: IEEE, 2015: 1-6. |
| [27] |
JIA Z, LU H, LI S, et al. Distributed dynamic rendezvous control of the AUV-USV joint system with practical disturbance compensations using model predictive control[J]. Ocean Engineering, 2022, 258: 111268.
doi: 10.1016/j.oceaneng.2022.111268 URL |
| [28] |
SARDA E I, DHANAK M R. Launch and recovery of an autonomous underwater vehicle from a station-keeping unmanned surface vehicle[J]. IEEE Journal of Oceanic Engineering, 2018, 44(2): 290-299.
doi: 10.1109/JOE.48 URL |
| [29] |
LI J, ZHANG G, LI B. Robust adaptive neural cooperative control for the USV-UAV based on the LVS-LVA guidance principle[J]. Journal of Marine Science and Engineering, 2022, 10(1): 51-70.
doi: 10.3390/jmse10010051 URL |
| [30] |
CHO H, JEONG S K, JI D H, et al. Study on control system of integrated unmanned surface vehicle and underwater vehicle[J]. Sensors, 2020, 20(9): 2633-2655.
doi: 10.3390/s20092633 URL |
| [31] |
PANTELEY E, LORIA A. On global uniform asymptotic stability of nonlinear time-varying systems in cascade[J]. Systems & Control Letters, 1998, 33(2): 131-138.
doi: 10.1016/S0167-6911(97)00119-9 URL |
| [32] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Trondheim, Norway: John Wiley & Sons, 2011. |
| [33] | PRESTERO T T J. Verification of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle[D]. Commonwealth of Massachusetts, USA: Massachusetts Institute of Technology, 2001. |
| [34] | KHALIL H K. Nonlinear systems[M]. 3rd ed. Upper Saddle River, New Jersey, USA: Prentice Hall, 2002. |
| [1] | TSIOGKAS N, PAPADIMITRIOU G, SAIGOL Z, et al. Efficient multi-AUV cooperation using semantic knowledge representation for underwater archaeology missions[C]// 2014 Oceans-St. John’s. St. John’s, USA: IEEE, 2014: 1-6. |
| [2] |
MAHMOUDZADEH S, ABBASI A, YAZDANI A, et al. Uninterrupted path planning system for multi-USV sampling mission in a cluttered ocean environment[J]. Ocean Engineering, 2022, 254: 111328.
doi: 10.1016/j.oceaneng.2022.111328 URL |
| [3] |
MAHACEK P, KITTS C A, MAS I. Dynamic guarding of marine assets through cluster control of automated surface vessel fleets[J]. IEEE/ASME Transactions on Mechatronics, 2011, 17(1): 65-75.
doi: 10.1109/TMECH.2011.2174376 URL |
| [4] |
MINA T, SINGH Y, MIN B C. Maneuvering ability-based weighted potential field framework for multi-USV navigation, guidance, and control[J]. Marine Technology Society Journal, 2020, 54(4): 40-58.
doi: 10.4031/MTSJ.54.4.6 URL |
| [5] | NIU H, JI Z, LIGUORI P, et al. Design, integration and sea trials of 3D printed unmanned aerial vehicle and unmanned surface vehicle for cooperative missions[C]// 2021 IEEE/SICE International Symposium on System Integration (SII). Iwaki, Fukushima, Japan: IEEE, 2021: 590-591. |
| [6] | LACHAUD E, MONBEIG Y, NOLLEAU P, et al. Opportunities and challenges of remote operating a ROV embarked on a USV[C]// Offshore Technology Conference. Houston, Texas, USA: OnePetro, 2018. |
| [7] |
TRAN C, GUSHKOV I, NORDVIK K, et al. Operability analysis of control system for ROV launch-and-recovery from autonomous surface vessel[J]. Ocean Engineering, 2023, 277: 114272.
doi: 10.1016/j.oceaneng.2023.114272 URL |
| [8] |
ZWOLAK K, WIGLEY R, BOHAN A, et al. The autonomous underwater vehicle integrated with the unmanned surface vessel mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE[J]. Remote Sensing, 2020, 12(8): 1344-1370.
doi: 10.3390/rs12081344 URL |
| [9] | 任章, 郭栋, 董希旺, 等. 飞行器集群协同制导控制方法及应用研究[J]. 导航定位与授时, 2019, 6(5): 1-9. |
| REN Zhang, GUO Dong, DONG Xiwang, et al. Research on the Ccooperative guidance and control method and application for aerial vehicle swarm systems[J]. Navigation Positioning and Timing, 2019, 6(5): 1-9. | |
| [10] | NANTOGMA S, RAN W, YANG X, et al. Behavior-based genetic fuzzy control system for multiple USVs cooperative target protection[C]// 2019 3rd International Symposium on Autonomous Systems (ISAS). Shanghai, China: IEEE, 2019: 181-186. |
| [11] | XU B, ZHANG J, WANG C. A real-time obstacle avoidance method for multi-AUV cluster based on artificial potential field[J]. Chinese Journal of Ship Research, 2018, 13(6): 66-71. |
| [1] | 李仪博, 周前, 朱丹丹, 姜亚峰, 吴秋伟, 陈健. 提高海上风电场主动频率支撑能力的控制策略[J]. 上海交通大学学报, 2025, 59(10): 1442-1450. |
| [2] | 何通, 韦亚利, 卢青, 毕千. 无人机群协同侦察多点目标路径规划与控制[J]. 空天防御, 2025, 8(1): 31-40. |
| [3] | 周毅, 周良才, 史迪, 赵小英, 闪鑫. 基于安全深度强化学习的电网有功频率协同优化控制[J]. 上海交通大学学报, 2024, 58(5): 682-692. |
| [4] | 金飞宇,陈龙胜,李统帅,石童昕. 高阶MIMO非线性多智能体系统分布式协同抗干扰控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 656-666. |
| [5] | 李彪, 王立文, 邢志伟, 王思博, 罗谦. 飞机地面除冰资源协同控制[J]. 上海交通大学学报, 2021, 55(11): 1362-1370. |
| [6] | 于特, 王磊. 基于协同控制的自重构平台算法及试验验证[J]. 上海交通大学学报, 2021, 55(11): 1493-1498. |
| [7] | 姜晓明, 王旭烽, 张伟芳, 刘宜罡. 激光跟瞄系统粗精复合轴协同控制策略优化研究[J]. 空天防御, 2019, 2(3): 31-37. |
| [8] | 张涛,李德骏,林鸣威,张梦辉,杨灿军. 海底观测网非接触式水下接驳系统的设计与实现[J]. 上海交通大学学报, 2018, 52(7): 784-792. |
| [9] | 柴本本1,巫少方1,张建武1,林连华2,徐海港2. 电驱动双速自动变速器换挡过程的最优控制[J]. 上海交通大学学报, 2018, 52(6): 658-665. |
| [10] | 杜晓旭,崔航. 自主水下航行器载荷侧向分离三维运动仿真分析[J]. 上海交通大学学报, 2017, 51(12): 1480-1487. |
| [11] | 朱信尧1,宋保维2,徐刚1,杨松林1. 支撑机构驻留水下航行器着陆策略及影响因素[J]. 上海交通大学学报, 2017, 51(10): 1241-1251. |
| [12] | 史建涛,何潇,周东华. 多机编队系统的协同容错控制[J]. 上海交通大学学报(自然版), 2015, 49(06): 819-824. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||