上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (9): 1443-1453.doi: 10.16183/j.cnki.jsjtu.2023.052
白文超1, 班明飞1( ), 宋梦2, 夏世威3, 李知艺4, 宋文龙1
), 宋梦2, 夏世威3, 李知艺4, 宋文龙1
收稿日期:2023-02-17
修回日期:2023-03-24
接受日期:2023-04-13
出版日期:2024-09-28
发布日期:2024-10-11
通讯作者:
班明飞,副教授,博士生导师;E-mail:mban2@iit.edu.
作者简介:白文超(1998—),硕士生,从事电动汽车路径优化研究.
基金资助:
BAI Wenchao1, BAN Mingfei1(), SONG Meng2, XIA Shiwei3, LI Zhiyi4, SONG Wenlong1
Received:2023-02-17
Revised:2023-03-24
Accepted:2023-04-13
Online:2024-09-28
Published:2024-10-11
摘要:
电动汽车(EV)和无人机(UAV)的迅速发展为紧急状态下的人员搜救与物资配送提供了新的技术手段.提出一种电动汽车-无人机(EV-UAV)联合救援系统.其中,无人机以电动汽车作为充电和维护基站,为待救援对象提供紧急救援服务,而电动汽车能够利用各类分布式电源获得多元化的电能补充,从而提高EV-UAV系统在紧急状态下的适应能力及续航水平.以混合整数线性规划形式建立该EV-UAV联合救援系统的协调调度模型,综合考虑电动汽车和无人机的电能消耗、电能补充、装载容量、配送路径以及配送时窗等因素.算例仿真验证了所建立模型的有效性,对比了EV-UAV型与地面车辆(GV)-UAV型联合救援系统,显示了EV-UAV联合救援系统在紧急求援中的技术特性和应用潜力.
中图分类号:
白文超, 班明飞, 宋梦, 夏世威, 李知艺, 宋文龙. 电动汽车-无人机联合救援系统协调调度模型[J]. 上海交通大学学报, 2024, 58(9): 1443-1453.
BAI Wenchao, BAN Mingfei, SONG Meng, XIA Shiwei, LI Zhiyi, SONG Wenlong. Coordinate Scheduling Model of Electric Vehicle-Unmanned Aerial Vehicle Joint Rescue System[J]. Journal of Shanghai Jiao Tong University, 2024, 58(9): 1443-1453.
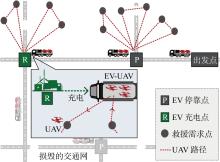
图1
EV-UAV联合系统示意图
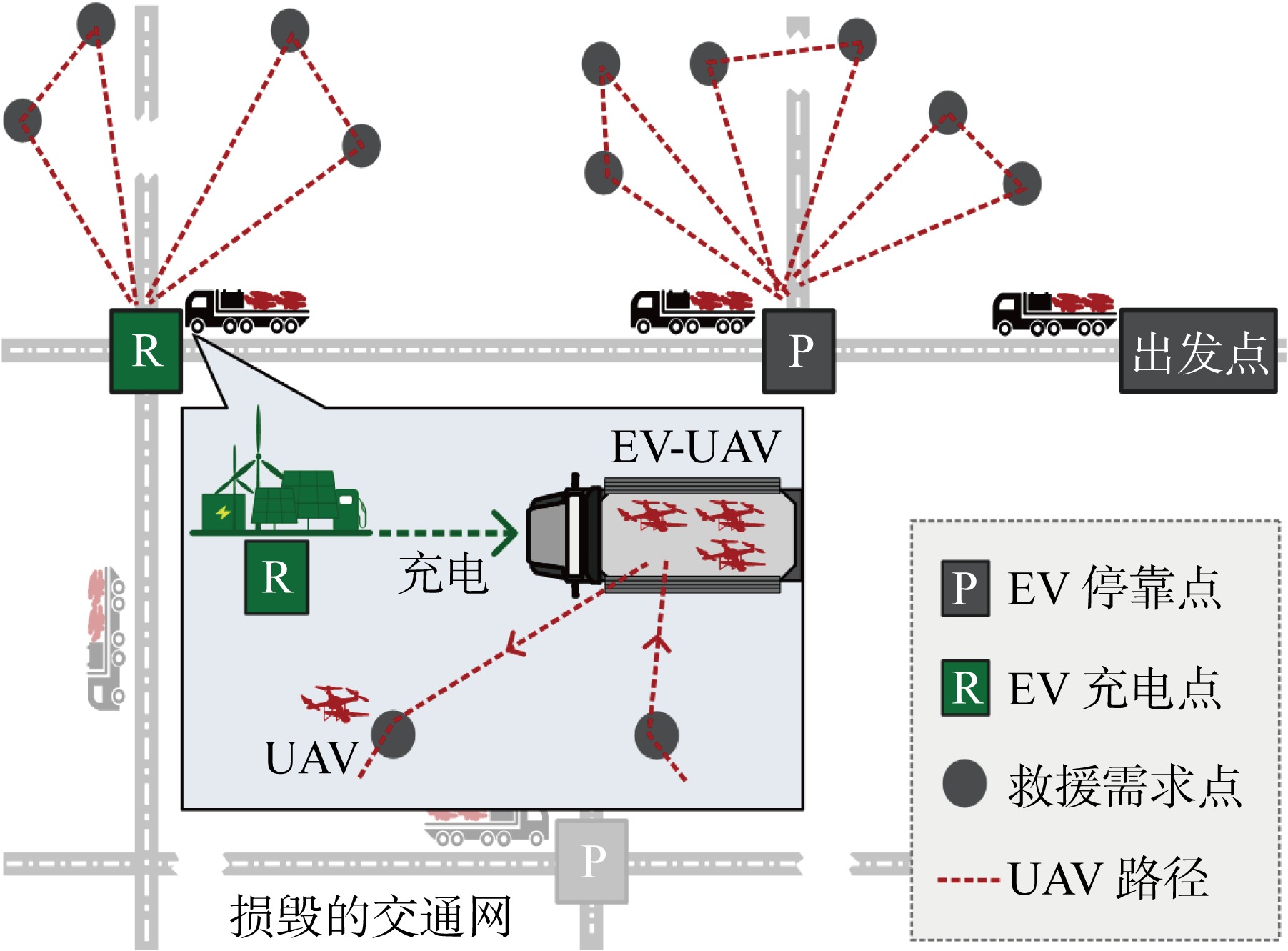
表1
某国产无人机参数
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 质量/kg | 9.5 | 电池电量/(W·h) | 200 |
| 负载/kg | 6 | 悬停时间/min | 32 |
| 水平悬停精度/m | ±1.5 | 垂直悬停精度/m | ±0.5 |
| 最大水平速度/(km·h-1) | 65 | 最大充电功率/W | 180 |
表2
某国产电动汽车参数
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 最大里程/km | 580 | 快充时间/min | 42 |
| 电池电量(kW·h) | 100 | 最大转矩/(N·m) | 725 |
| 最大功率/kW | 400 | 最高车速/(km·h-1) | 200 |
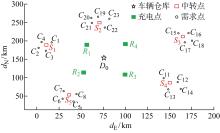
图2
算例系统示意图

图3
算例1和算例2的规划结果
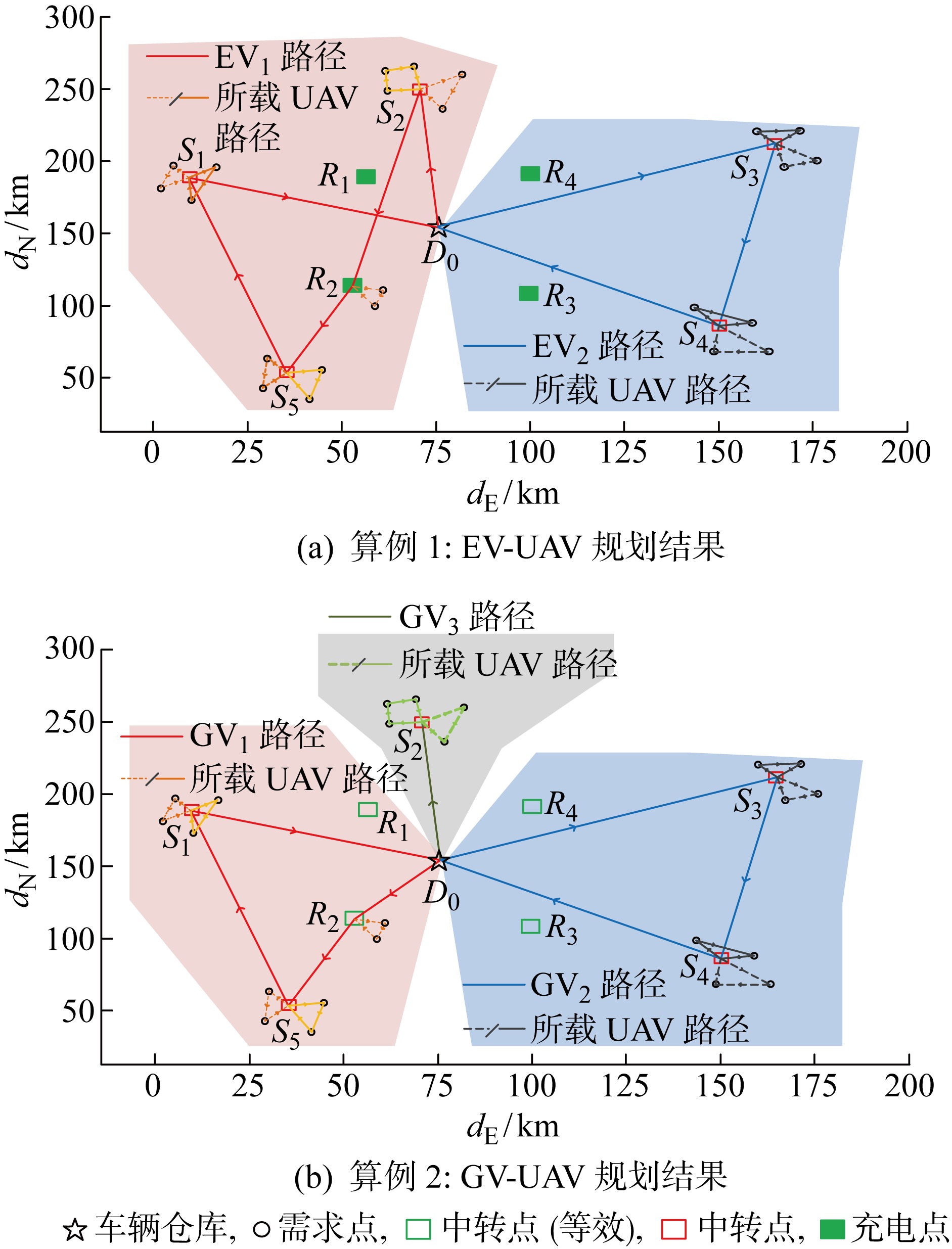
图4
充电点数量变化对调度结果的影响
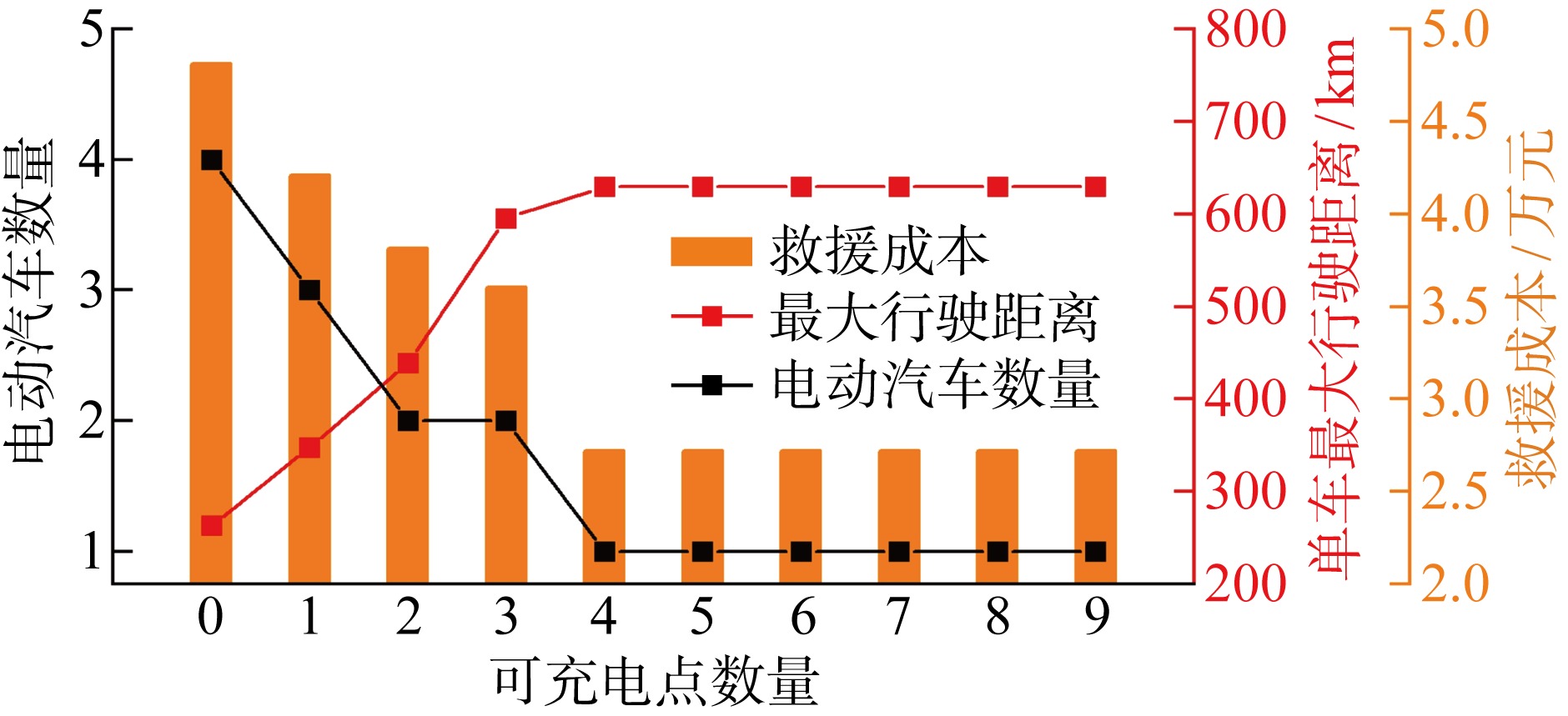
图5
电动汽车电池容量对调度结果的影响
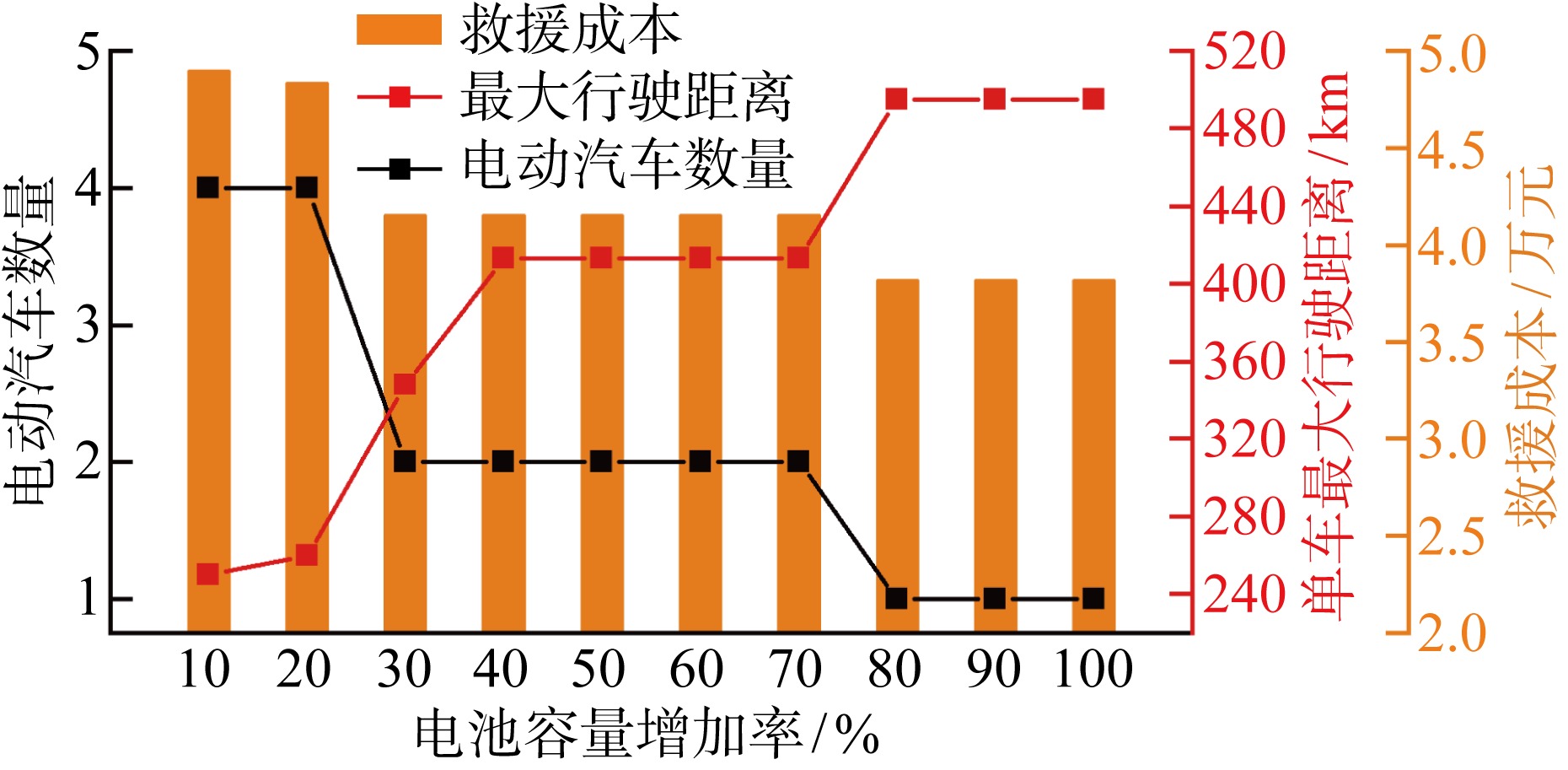
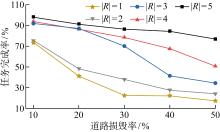
图6
不同道路损毁率下的救援任务完成率
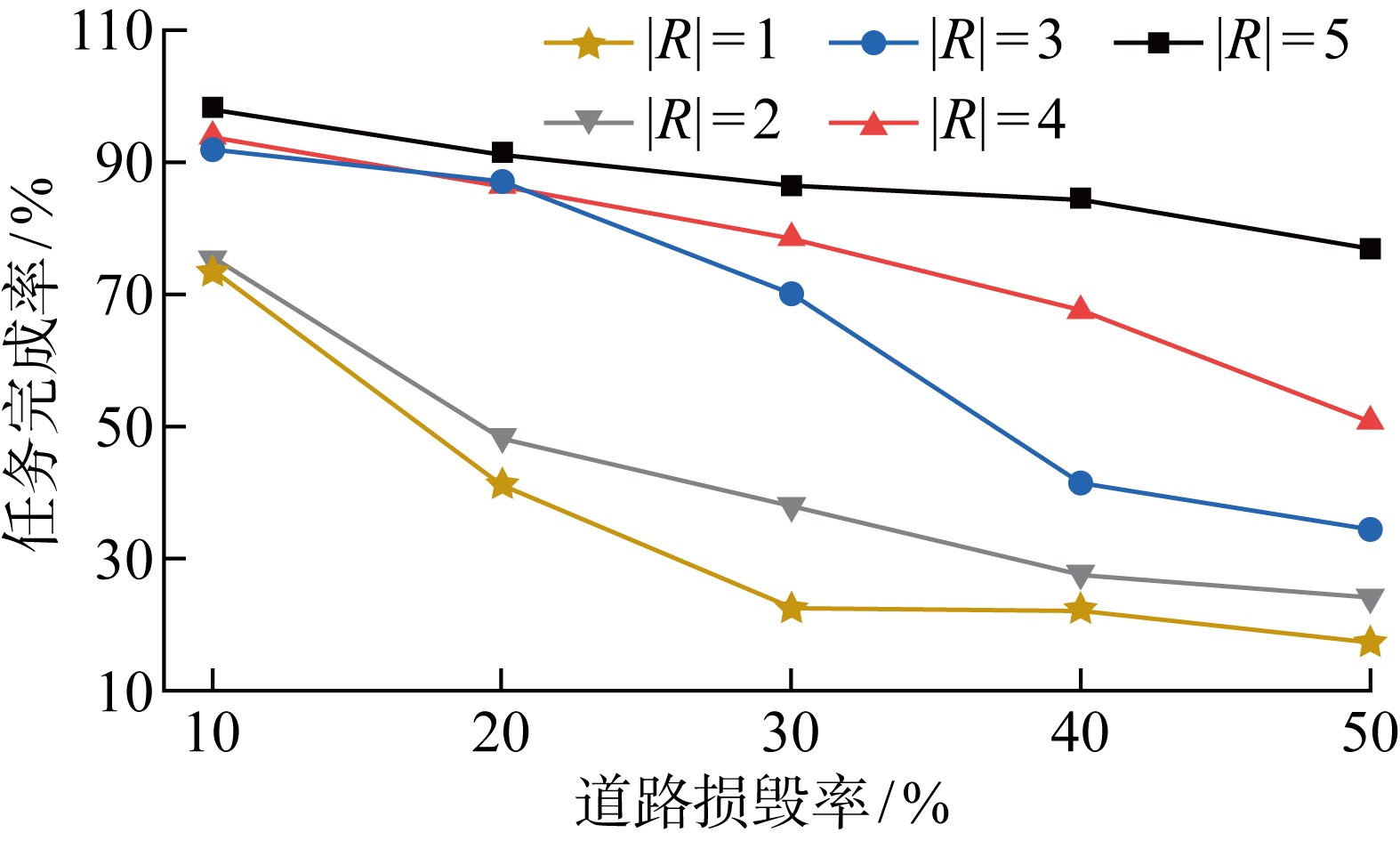
图7
充电点充电功率对调度结果的影响
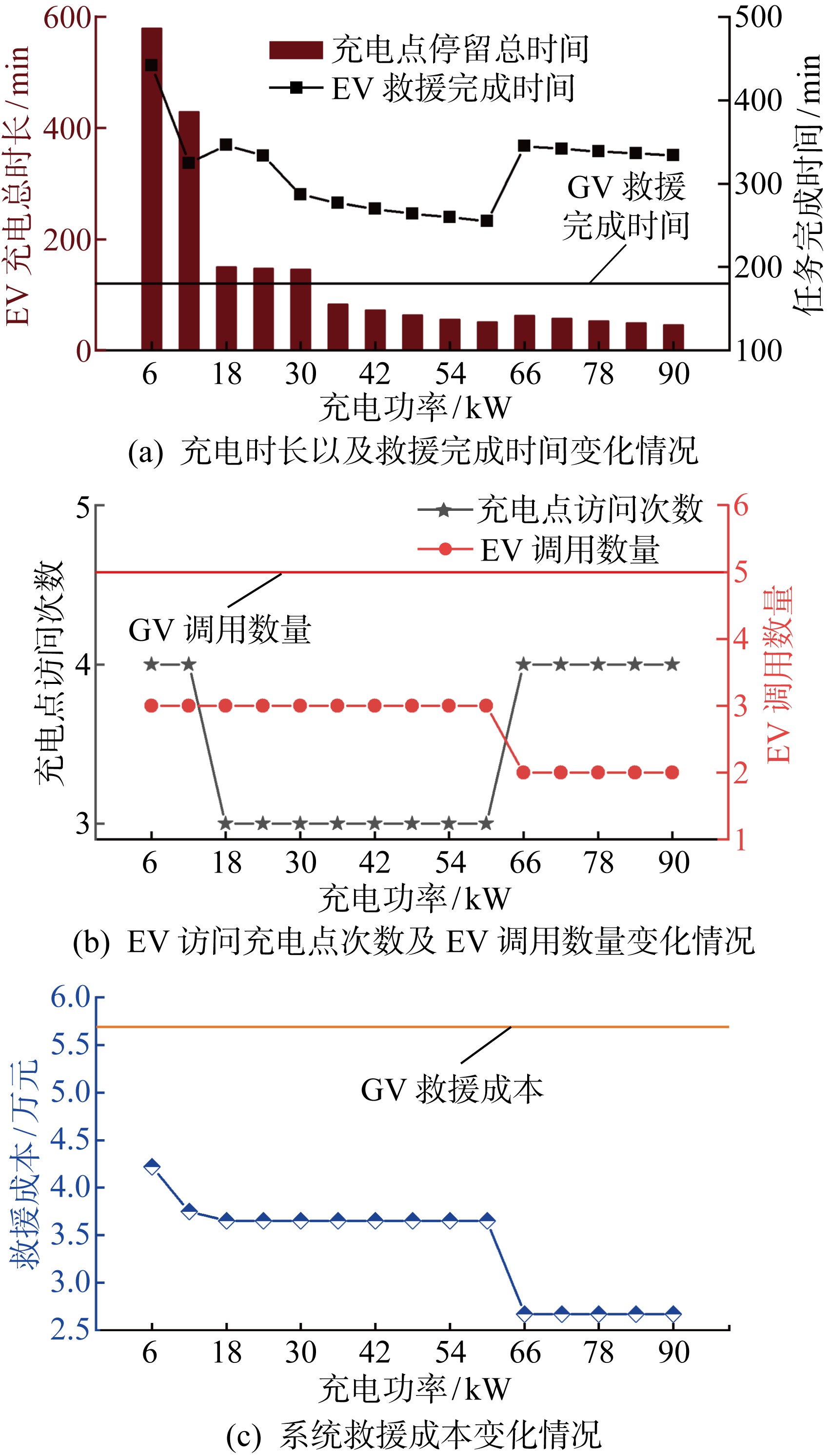
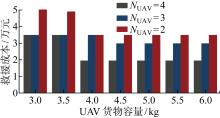
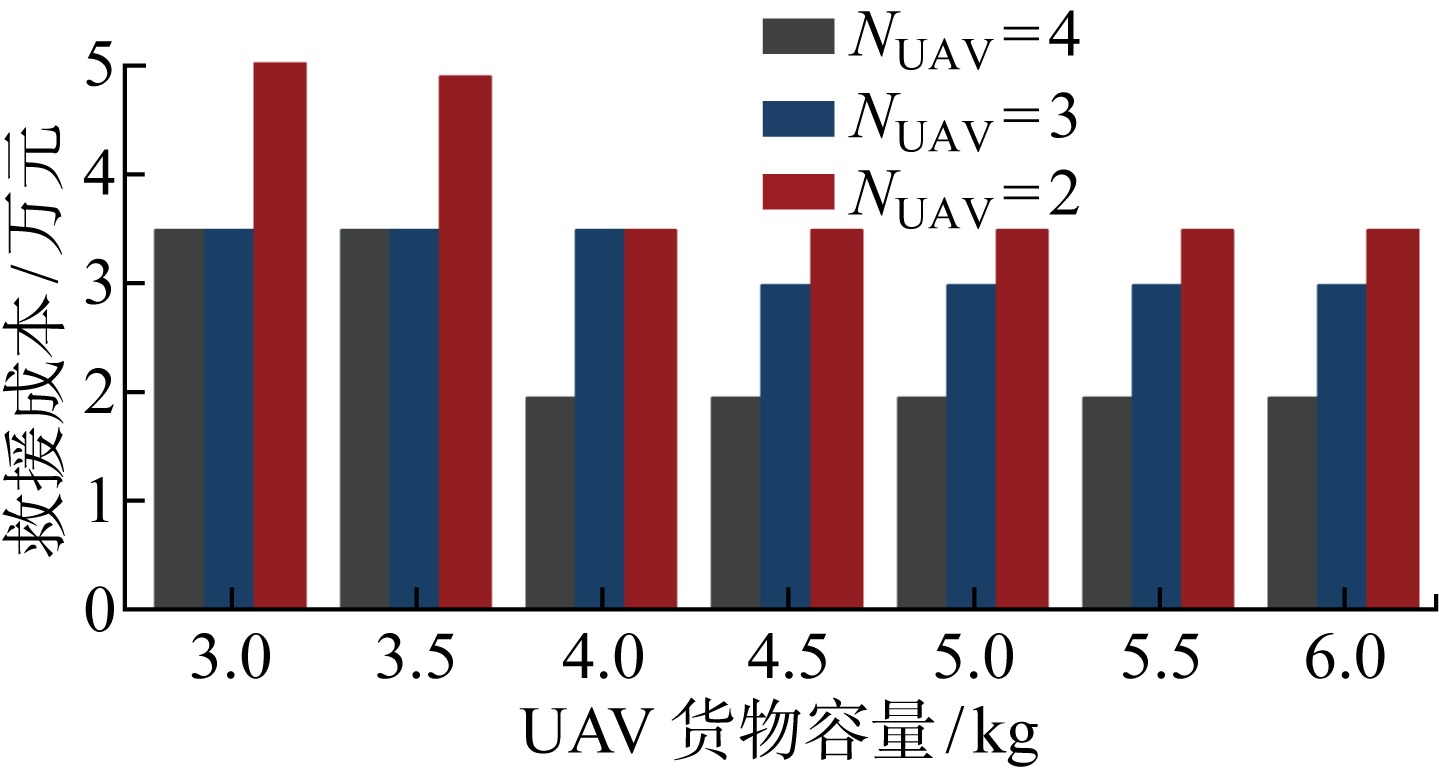
图8
无人机数量及容量对救援成本影响
| [1] | SHIEH E, HABIBI K, TORABI K, et al. Earthquake risk in urban street network: An example from region 6 of Tehran, Iran[J]. International Journal of Disaster Resilience in the Built Environment, 2014, 5: 413-426. |
| [2] | NEDJATI A, VIZVARI B, IZBIRAK G. Post-earthquake response by small UAV helicopters[J]. Natural Hazards, 2016, 80(3): 1669-1688. |
| [3] | 陆博迪, 孟迪文, 陆鸣, 等. 无人机在重大自然灾害中的应用与探讨[J]. 灾害学, 2011, 26(4): 122-126. |
| LU Bodi, MENG Diwen, LU Ming, et al. Application and exploration of unmanned aerial vehicle in major natural disasters[J]. Journal of Catastrophology, 2011, 26(4): 122-126. | |
| [4] | 王林. 无人机在应对地震灾害方面的应用及发展[J]. 中国应急救援, 2016(6): 33-36. |
| WANG Lin. Application and development of unmanned aerial vehicle in dealing with earthquake disasters[J]. China Emergency Rescue, 2016(6): 33-36. | |
| [5] | CHAMOLA V, HASSIJA V, GUPTA V, et al. A comprehensive review of the COVID-19 pandemic and the role of IoT, drones, AI, blockchain, and 5G in managing its impact[J]. IEEE Access, 2020, 8: 90225-90265. |
| [6] | 于驷男, 周锐, 夏洁, 等. 多无人机协同搜索区域分割与覆盖[J]. 北京航空航天大学学报, 2015, 41(1): 167-173. |
| YU Sinan, ZHOU Rui, XIA Jie, et al. Decomposition and coverage of multi-UAV cooperative search area[J]. Journal of Beijing University of Aeronautics & Astronautics, 2015, 41(1): 167-173. | |
| [7] | 王宁, 李哲, 梁晓龙, 等. 基于搜索意图交互的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2022, 48(3): 454-463. |
| WANG Ning, LI Zhe, LIANG Xiaolong, et al. Cooperative search algorithm for UAV swarm based on search intention interaction[J]. Journal of Beijing University of Aeronautics & Astronautics, 2022, 48(3): 454-463. | |
| [8] | AVELLAR G S C, PEREIRA G A S, PIMENTA L C A, et al. Multi-UAV routing for area coverage and remote sensing with minimum time[J]. Sensors (Basel, Switzerland), 2015, 15(11): 27783-27803. |
| [9] | ALIGHANBARI M, KUWATA Y, HOW J P. Coordination and control of multiple UAVs with timing constraints and loitering[C]//Proceedings of the 2003 American Control Conference. Denver, USA: IEEE, 2003: 5311-5316. |
| [10] | 吴健发, 王宏伦, 王延祥, 等. 无人机反应式扰动流体路径规划[J]. 自动化学报, 2023, 49(2): 272-287. |
| WU Jianfa, WANG Honglun, WANG Yanxiang, et al. UAV reactive interfered fluid path planning[J]. Acta Automatica Sinica, 2023, 49(2): 272-287. | |
| [11] | 杜继永, 张凤鸣, 毛红保, 等. 多UAV协同搜索的博弈论模型及快速求解方法[J]. 上海交通大学学报, 2013, 47(4): 667-673. |
| DU Jiyong, ZHANG Fengming, MAO Hongbao, et al. Game theory based multi-UAV cooperative searching model and fast solution approach[J]. Journal of Shanghai Jiao Tong University, 2013, 47(4): 667-673. | |
| [12] | 白杰, 杨根科, 潘常春, 等. 基于改进分散搜索算法的无人机路径规划[J]. 上海交通大学学报, 2011, 45(2): 173-178. |
| BAI Jie, YANG Genke, PAN Changchun, et al. A revised scatter search algorithm for path planning of multiple UAVs[J]. Journal of Shanghai Jiao Tong University, 2011, 45(2): 173-178. | |
| [13] | HONG I, KUBY M, MURRAY A T. A range-restricted recharging station coverage model for drone delivery service planning[J]. Transportation Research Part C: Emerging Technologies, 2018, 90: 198-212. |
| [14] | MURRAY C C, CHU A G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery[J]. Transportation Research Part C: Emerging Technologies, 2015, 54: 86-109. |
| [15] | WANG X Y, POIKONEN S, GOLDEN B. The vehicle routing problem with drones: Several worst-case results[J]. Optimization Letters, 2017, 11(4): 679-697. |
| [16] | HAM A M. Integrated scheduling of m-truck, m-drone, and m-depot constrained by time-window, drop-pickup, and m-visit using constraint programming[J]. Transportation Research Part C: Emerging Technologies, 2018, 91: 1-14. |
| [17] | FAIZ T I, VOGIATZIS C, NOOR-E-ALAM M. Computational approaches for solving two-echelon vehicle and UAV routing problems for post-disaster humanitarian operations[DB/OL]. (2022-06-30) [2023-01-22]. https://arxiv.org/abs/2001.06456. |
| [18] | ANDELMIN J, BARTOLINI. An exact algorithm for the green vehicle routing problem[J]. Transportation Science, 2017, 51(4): 1288-1303. |
| [19] | 王道涵, 彭晨, 王柄东, 等. 电动汽车新型转子内置式永磁同步电动机转矩脉动与电磁振动抑制研究[J]. 中国电机工程学报, 2022, 42(14): 5289-5299. |
| WANG Daohan, PENG Chen, WANG Bingdong, et al. Research on a novel interior permanent magnet machine with segmented rotor to mitigate torque ripple and electromagnetic vibration[J]. Proceedings of the CSEE, 2022, 42(14): 5289-5299. | |
| [20] | 王晓远, 贺晓钰, 高鹏. 电动汽车用 V 型磁钢转子永磁电机的电磁振动噪声削弱方法研究[J]. 中国电机工程学报, 2019, 39(16): 4919-4926. |
| WANG Xiaoyuan, HE Xiaoyu, GAO Peng. Research on electromagnetic vibration and noise reduction method of V type magnet rotor permanent magnet motor electric vehicles[J]. Proceedings of the CSEE, 2019, 39(16): 4919-4926. | |
| [21] | 马丽叶, 王海锋, 卢志刚. 计及故障率影响含电动汽车的分布式电源选址定容双层协调规划[J]. 电网技术, 2021, 45(12): 4749-4760. |
| MA Liye, WANG Haifeng, LU Zhigang. Double-layer coordinated planning for location and capacity of distributed power supply with electric vehicles considering failure rate[J]. Power System Technology, 2021, 45(12): 4749-4760. | |
| [22] | 董洁霜, 董智杰. 考虑建站费用的电动汽车充电站选址问题研究[J]. 森林工程, 2014, 30(6): 104-108. |
| DONG Jieshuang, DONG Zhijie. Flow-refueling models for locating alternative-fuel stations with consideration of construction cost[J]. Forestry Engineering, 2014, 30(6): 104-108. | |
| [23] | 杨祺铭, 李更丰, 别朝红, 等. 台风灾害下基于V2G的城市配电网弹性提升策略[J]. 电力系统自动化, 2022, 46(12): 130-139. |
| YANG Qiming, LI Gengfeng, BIE Zhaohong, et al. Vehicle-to-grid based resilience promotion strategy for urban distribution network under typhoon disaster[J]. Automation of Electric Power Systems, 2022, 46(12): 130-139. | |
| [24] | 黄裕春, 王宏, 文福拴. 含区间数的电力应急网络最优调度路径的确定[J]. 电力系统及其自动化学报, 2015, 27(1): 19-25. |
| HUANG Yuchun, WANG Hong, WEN Fushuan. Determining of optimal scheduling path in power emergency support network represented by interval values[J]. Proceedings of the CSU-EPSA, 2015, 27(1): 19-25. | |
| [25] | 王洪坤, 王守相, 潘志新, 等. 含高渗透分布式电源配电网灵活性提升优化调度方法[J]. 电力系统自动化, 2018(1): 86-93. |
| WANG Hongkun, WANG Shouxiang, PAN Zhixin, et al. Optimized dispatching method for flexibility improvement of distribution network with high-penetration distributed generation[J]. Automation of Electric Power Systems, 2018(1): 86-93. | |
| [26] | LEI S B, CHEN C, LI Y P, et al. Resilient disaster recovery logistics of distribution systems: Co-optimize service restoration with repair crew and mobile power source dispatch[J]. IEEE Transactions on Smart Grid, 2019, 10(6): 6187-6202. |
| [27] | 施绪金. 加油站资产的受灾特点与防灾建议[J]. 中国化工装备, 2011, 13(2): 35-41. |
| SHI Xujin. Features of disaster affection on service station assets and disaster prevention suggestions[J]. China Chemical Industry Equipment, 2011, 13(2): 35-41. | |
| [28] | 方嵩, 彭嵩, 赵晋泉, 等. 分布式电源辅助电网黑启动研究综述[J]. 广东电力, 2019, 32(1): 20-28. |
| FANG Song, PENG Song, ZHAO Jinquan, et al. Research overview of power grid black-start with the aid of distributed generation[J]. Guangdong Electric Power, 2019, 32(1): 20-28. | |
| [29] | 万千, 夏成军, 管霖, 等. 含高渗透率分布式电源的独立微网的稳定性研究综述[J]. 电网技术, 2019, 43(2): 598-612. |
| WAN Qian, XIA Chengjun, GUAN Lin, et al. Review on stability of isolated microgrid with highly penetrated distributed generations[J]. Power System Technology, 2019, 43(2): 598-612. | |
| [30] | 刘畅, 卓建坤, 赵东明, 等. 利用储能系统实现可再生能源微电网灵活安全运行的研究综述[J]. 中国电机工程学报, 2020, 40(1): 1-18. |
| LIU Chang, ZHUO Jiankun, ZHAO Dongming, et al. A review on the utilization of energy storage system for the flexible and safe operation of renewable energy microgrids[J]. Proceedings of the CSEE, 2020, 40(1): 1-18. | |
| [31] | DRAGIČEVIĆ T, LU X N, VASQUEZ J C, et al. DC microgrids—Part I: A review of control strategies and stabilization techniques[J]. IEEE Transactions on Power Electronics, 2016, 31(7): 4876-4891. |
| [32] | 许玮, 冀肖彤, 刘海波, 等. 电动汽车应急救援站选址及资源配置[J]. 山东大学学报(工学版), 2017, 47(6): 115-120, 150. |
| XU Wei, JI Xiaotong, LIU Haibo, et al. Location selection and resource allocation of emergency rescue station for electric vehicles[J]. Journal of Shandong University (Engineering Science), 2017, 47(6): 115-120, 150. | |
| [33] | 李志铿, 汪隆君, 王钢, 等. 计及故障重构的含分布式电源配电网可靠性评估[J]. 电力系统自动化, 2013, 37(4): 35-40. |
| LI Zhikeng, WANG Longjun, WANG Gang, et al. Reliability evaluation for distribution system with distributed generations considering reconfiguration[J]. Automation of Electric Power Systems, 2013, 37(4): 35-40. | |
| [34] | 王韶, 谭文, 黄晗. 计及微电网中可再生能源间歇性影响的配电网可靠性评估[J]. 电力自动化设备, 2015, 35(4): 31-37. |
| WANG Shao, TAN Wen, HUANG Han. Distribution system reliability evaluation considering influence of intermittent renewable energy sources for microgrid[J]. Electric Power Automation Equipment, 2015, 35(4): 31-37. | |
| [35] | YAO C Q, CHEN S B, YANG Z Y. Joint routing and charging problem of multiple electric vehicles: A fast optimization algorithm[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8184-8193. |
| [36] | 杨祺铭, 李更丰, 别朝红, 等. 台风灾害下基于V2G的城市配电网弹性提升策略[J]. 电力系统自动化, 2022, 46(12): 130-139. |
| YANG Qiming, LI Gengfeng, BIE Zhaohong, et al. Vehicle-to-grid based resilience promotion strategy for urban distribution network under typhoon disaster[J]. Automation of Electric Power Systems, 2022, 46(12): 130-139. | |
| [37] | SABOORI H, MEHRJERDI H, JADID S. Mobile battery storage modeling and normal-emergency operation in coupled distribution-transportation networks[J]. IEEE Transactions on Sustainable Energy, 2022, 13(4): 2226-2238. |
| [38] | 施孟佶, 秦开宇, 李凯, 等. 高压输电线路多无人机自主协同巡线设计与测试[J]. 电力系统自动化, 2017, 41(10): 117-122. |
| SHI Mengji, QIN Kaiyu, LI Kai, et al. Design and testing on autonomous multi-UAV cooperation for high-voltage transmission line inspection[J]. Automation of Electric Power Systems, 2017, 41(10): 117-122. | |
| [39] | 徐其春, 郭晨晨, 刘志明, 等. 无人机线路自主巡检的动态轨迹规划方法[J]. 电力系统及其自动化学报, 2022, 34(10): 24-31. |
| XU Qichun, GUO Chenchen, LIU Zhiming, et al. Drone autonomous inspection method for transmission line based on dynamic trajectory planning[J]. Proceedings of the CSU-EPSA, 2022, 34(10): 24-31. | |
| [40] |
李登攀, 任晓明, 颜楠楠. 基于无人机航拍的绝缘子掉串实时检测研究[J]. 上海交通大学学报, 2022, 56(8): 994-1003.
doi: 10.16183/j.cnki.jsjtu.2021.416 |
| LI Dengpan, REN Xiaoming, YAN Nannan. Real-time detection of insulator drop string based on UAV aerial photography[J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 994-1003. | |
| [41] | 刘瑞环, 陈晨, 叶志刚, 等. 基于无人机应急通信的配电网灾后信息物理协同恢复策略[J]. 电网技术, 2023, 47(3): 1218-1230. |
| LIU Ruihuan, CHEN Chen, YE Zhigang, et al. Cooperative cyber-physical distribution system restoration with UAV-based emergency communication UAV after disasters[J]. Power System Technology, 2023, 47(3): 1218-1230. | |
| [42] | 雷添杰, 李长春, 何孝莹. 无人机航空遥感系统在灾害应急救援中的应用[J]. 自然灾害学报, 2011, 20(1): 178-183. |
| LEI Tianjie, LI Changchun, HE Xiaoying. Application of UAV aerial remote sensing system in disaster emergency rescue[J]. Journal of Natural Disasters, 2011, 20(1): 178-183. |
| [1] | 杨增力, 王若琪, 胡炎, 范春菊, 王晶. 含柔性软开关有源配电网故障恢复合闸时冲击电流对电流保护的影响[J]. 上海交通大学学报, 2026, 60(2): 270-276. |
| [2] | . 合成数据驱动的无人机检测与分类多任务框架[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 209-220. |
| [3] | 刘林, 杨丝雨, 黄夏楠, 陈延滔, 徐化帅, 王玲玲, 蒋传文. 数据-模型混合驱动的电动汽车集群行为模拟方法[J]. 上海交通大学学报, 2026, 60(1): 51-60. |
| [4] | 王若琪, 胡炎, 杨增力, 王晶, 吴迪, 张振. 大量分布式电源接入的配电网自适应重合闸及故障恢复策略[J]. 上海交通大学学报, 2026, 60(1): 42-50. |
| [5] | 夏筱彦, 张宇, 胡锡坤, 钟平. 基于扩散模型的无人机遥感目标检测物理对抗攻击方法研究[J]. 空天防御, 2026, 9(1): 52-62. |
| [6] | 刘永江, 郭杉, 贾俊青, 刘小恺, 蔡文超, 曾龙. 多种充电模式协同的规模化电动汽车分层充电方法[J]. 上海交通大学学报, 2025, 59(9): 1304-1314. |
| [7] | 胡龙, 方八零, 樊飞龙, 陈达伟, 李新喜, 曾润. 用户-基站-充电站能量互动和储能共享优化方法[J]. 上海交通大学学报, 2025, 59(7): 877-888. |
| [8] | 崔思远, 李浩, 范翔宇, 倪磊, 侯佳航. 基于AMDE-DMPC算法的多无人机协同目标搜索方法[J]. 空天防御, 2025, 8(6): 35-44. |
| [9] | . 基于多种影响因素的电动汽车充电负荷建模方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1232-1241. |
| [10] | . 无人机协助和用户协作的非线性能量收集移动边缘计算系统资源分配方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1220-1231. |
| [11] | 王志博, 呼卫军, 马先龙, 全家乐, 周皓宇. 感知驱动控制的无人机拦截碰撞技术[J]. 空天防御, 2025, 8(4): 78-84. |
| [12] | 葛鲁亲, 丁士洲, 姚强, 张诚, 黄雨辰. 无人机抗电磁干扰机理与抗干扰技术研究综述[J]. 空天防御, 2025, 8(4): 51-55. |
| [13] | . 血管介入手术路径规划及三维视觉导航[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(3): 472-481. |
| [14] | 李奕佳, 李嘉诺, 柯良军. 基于强化学习的无人机协作防守策略设计与验证[J]. 空天防御, 2025, 8(3): 73-85. |
| [15] | 孙亮, 王明宇, 周素华, 雷荣强. 重点城市要点防卫小型无人机袭扰作战问题研究[J]. 空天防御, 2025, 8(2): 112-117. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||