上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (7): 944-952.doi: 10.16183/j.cnki.jsjtu.2021.375
所属专题: 《上海交通大学学报》2022年“交通运输工程”专题
李锦江, 向先波( ), 刘传, 杨少龙
), 刘传, 杨少龙
收稿日期:2021-09-26
出版日期:2022-07-28
发布日期:2022-08-16
通讯作者:
向先波
E-mail:xbxiang@hust.edu.cn.
作者简介:李锦江(1997-),男,福建省泉州市人,硕士生,从事海洋航行器运动控制研究.
基金资助:
LI Jinjiang, XIANG Xianbo(), LIU Chuan, YANG Shaolong
Received:2021-09-26
Online:2022-07-28
Published:2022-08-16
Contact:
XIANG Xianbo
E-mail:xbxiang@hust.edu.cn.
摘要:
针对自主水下机器人(AUV)面向海底起伏地形跟踪的实际应用需求,设计了基于预设性能制导律的鲁棒时滞跟踪控制器,实现执行机构时滞下的AUV起伏地形跟踪,同时可提升其航行安全性能.首先,基于航行安全性能函数对地形跟踪误差进行转换,结合时变视线制导角在运动学层面设计了预设性能制导律,为AUV动力层提供参考状态输入.其次,为处理执行机构时滞问题并降低精确建模需求,结合径向基函数(RBF)神经网络设计了鲁棒时滞动力学控制器. 最后,采用李雅普诺夫理论证明了基于预设性能制导律的鲁棒时滞跟踪控制系统闭环稳定性.仿真结果表明:所设计的控制器可实现AUV起伏地形鲁棒跟踪,且瞬态跟踪误差时刻处于预设性能范围之内,可提升AUV在跟踪海底起伏地形时的航行安全性能.
中图分类号:
李锦江, 向先波, 刘传, 杨少龙. 基于预设性能制导律的欠驱动AUV海底地形鲁棒时滞跟踪控制[J]. 上海交通大学学报, 2022, 56(7): 944-952.
LI Jinjiang, XIANG Xianbo, LIU Chuan, YANG Shaolong. Robust Seabed Terrain Following Control of Underactuated AUV with Prescribed Performance Guidance Law Under Time Delay of Actuator[J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 944-952.
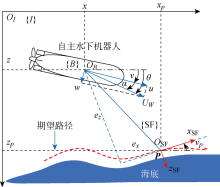
图1
自主水下机器人起伏地形跟踪示意图

图2
基于预设性能制导律的鲁棒时滞控制器框图
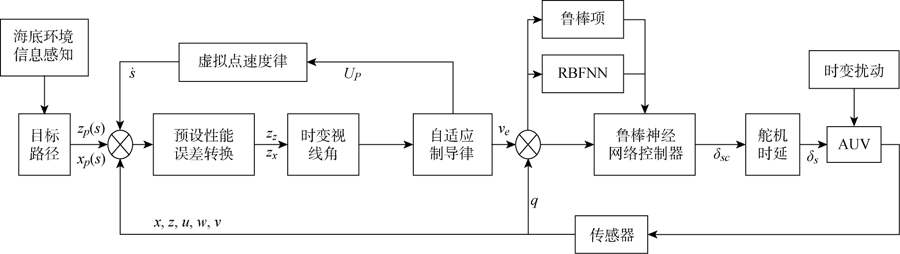
表1
仿真对象水动力模型参数表
| 参数 | 取值 |
|---|---|
| m/kg | 30.48 |
| W/N | 299 |
| B/N | 306 |
| Iyy/(N·kg·m2) | 3.45 |
| xg/m | 0 |
| zg/m | 0.019 6 |
| | -4.88 |
| | -1.93 |
| Mw|w|/kg | 3.18 |
| Mq|q|/(kg·m2·rad-2) | -188 |
| Muq/(kg·m·rad-1) | -2 |
| Muw/kg | 24 |
| Muuδ/(kg·rad-1) | -6.15 |
| | -35.5 |
| zw|w|/(kg·m-1) | -131 |
| zq|q|/(kg·m2·rad-2) | -0.632 |
| zuw/(kg·m-1) | -28.6 |
| zuq/(kg·rad-1) | -5.22 |
| λδ/s | 1.2 |
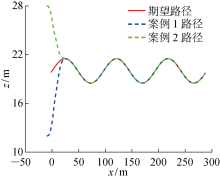
图3
深度面路径跟踪效果图
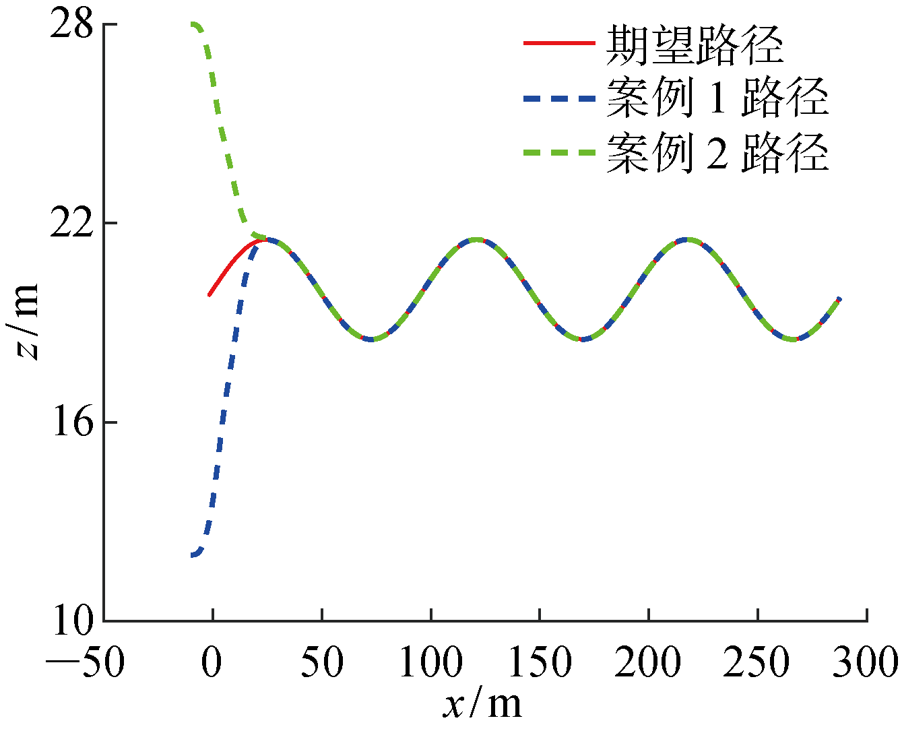
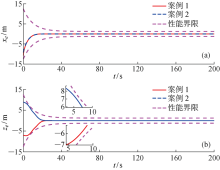
图4
系统状态误差及预设性能界限图
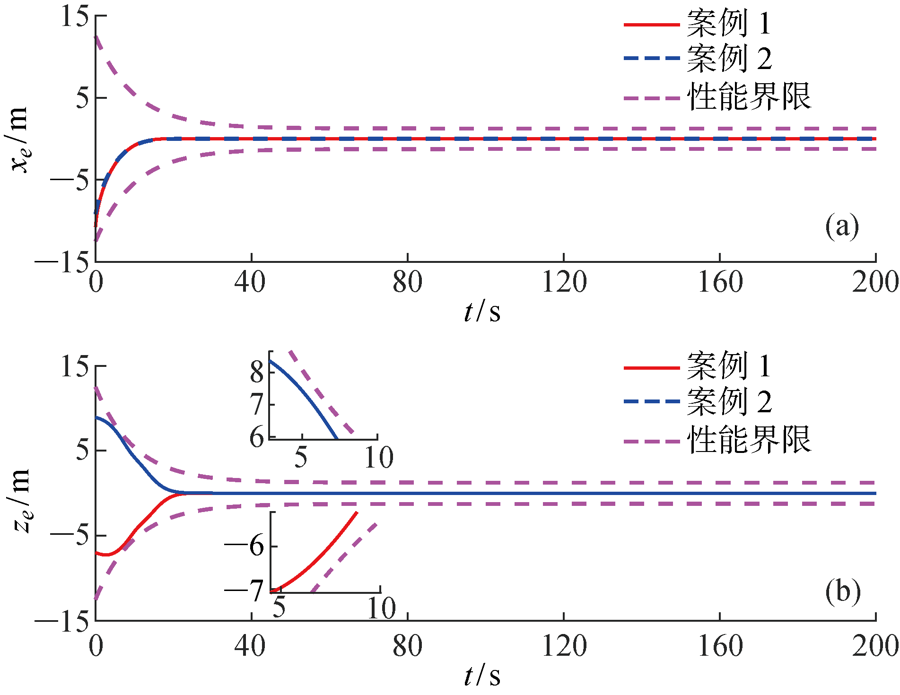
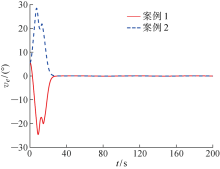
图5
潜伏角跟踪误差曲线
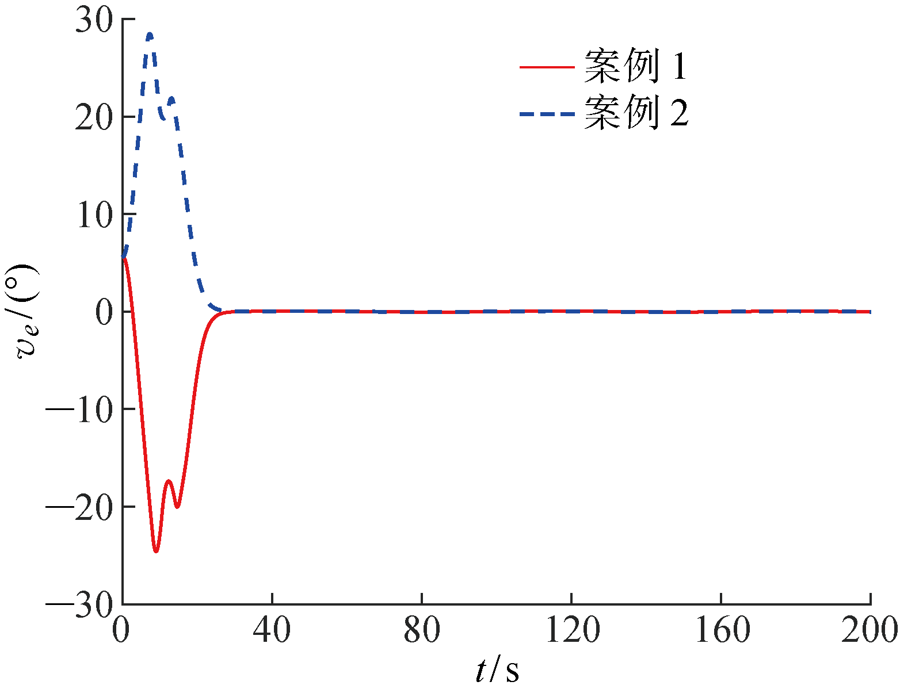

图6
案例1控制舵角指令及真实舵角


图7
案例2控制舵角指令及真实舵角
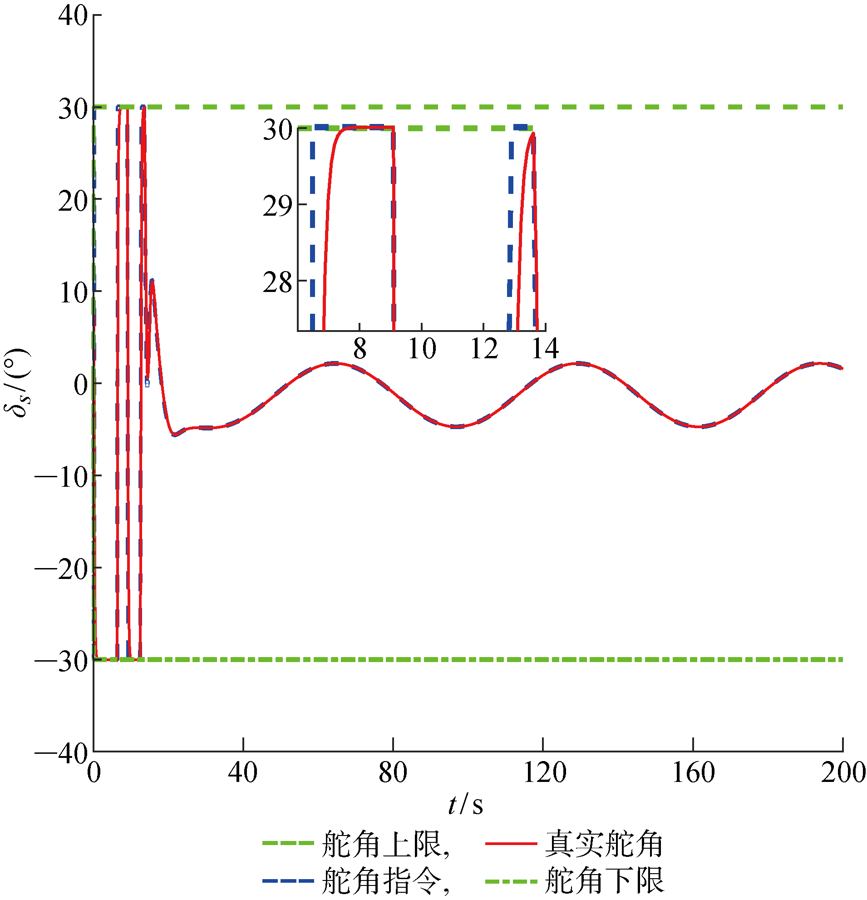
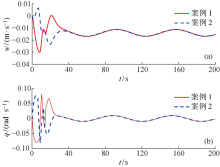
图8
系统速度曲线图

表2
控制性能指标
| 初始状态 | txs/s | tzs/s | MAEx/m | MAEz/m | MIA/(°) | MTV/(°) |
|---|---|---|---|---|---|---|
| (-10 m, 12 m, 0°)T | 15.1 | 22.1 | 0.1912 | 0.1912 | 0.0790 | 0.0031 |
| (-10 m, 12 m, 0°)T | 16.1 | 22.0 | 0.1943 | 0.1945 | 0.0762 | 0.0030 |
| [21] | YU Caoyang. On fuzzy-approximator-compensator-based saturated tracking control of autonomous underwater vehicles with configuration switching[D]. Wuhan: Huazhong University of Science and Technology, 2018. |
| [22] |
LI X, LUO X, WANG J, et al. Finite-time consensus of nonlinear multi-agent system with prescribed performance[J]. Nonlinear Dynamic, 2018, 91(4): 2397-2409.
doi: 10.1007/s11071-017-4020-1 URL |
| [1] | 于曹阳, 向先波, 张嘉磊, 等. 基于反步法的欠驱动水下机器人鲁棒定深控制[J]. 华中科技大学学报(自然科学版), 2017, 45(10): 117-121. |
| YU Caoyang, XIANG Xianbo, ZHANG Jialei, et al. Robust depth control of under-actuated underwater vehicles based on backstepping[J], Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(10): 117-121. | |
| [2] |
DO K D, PAN J. Robust path-following of underactuated ships: Theory and experiments on a model ship[J]. Ocean Engineering, 2006, 33(10): 1354-1372.
doi: 10.1016/j.oceaneng.2005.07.011 URL |
| [3] |
WANG N, SUN Z, YIN J, et al. Fuzzy unknown observer-based robust adaptive path following control of underactuated surface vehicles subject to multiple unknowns[J]. Ocean Engineering, 2019, 176(3): 57-64.
doi: 10.1016/j.oceaneng.2019.02.017 URL |
| [4] | 余亚磊, 苏荣彬, 冯旭, 等. 基于速变LOS的无人船反步自适应路径跟踪控制[J]. 中国舰船研究, 2019, 14(3): 163-171. |
| YU Yalei, SU Rongbin, FENG Xu, et al. Tracking control of backstepping adaptive path of unmanned surface vessels based on surge-varying LOS[J]. Chinese Journal of Ship Research, 2019, 14(3): 163-171. | |
| [5] |
YU C, XIANG X, WILSON P A, et al. Guidance-error-based robust fuzzy adaptive control for bottom following of a flight-style AUV with saturated actuator dynamics[J]. IEEE Transactions on Cybernetic, 2020, 50(5): 1887-1899.
doi: 10.1109/TCYB.2018.2890582 URL |
| [6] |
ZHENG Z, FEROSKHAN M. Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2564-2575.
doi: 10.1109/TMECH.2017.2756110 URL |
| [7] |
WEN C, ZHOU J, LIU Z. Robust adaptive control of uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2002, 56(7): 1672-1678.
doi: 10.1109/TAC.2011.2122730 URL |
| [8] |
JIN X. Fault tolerant finite-time leader-follower formation control for autonomous surface vessels with LOS range and angle constraints[J]. Automatica, 2016, 68(1): 228-236.
doi: 10.1016/j.automatica.2016.01.064 URL |
| [9] |
SHOJAEI K. Neural adaptive robust control of underactuated marine surface vehicles with input saturation[J]. Applied Ocean Research, 2015, 53(10): 267-278.
doi: 10.1016/j.apor.2015.09.010 URL |
| [10] |
THIEME C A, UTNE I B. Safety performance monitoring of autonomous marine systems[J]. Reliability Engineering & System Safety, 2017, 159(3): 264-275.
doi: 10.1016/j.ress.2016.11.024 URL |
| [11] | SUH J, KIM B, YI K. Design and evaluation of a driving mode decision algorithm for automated driving vehicle on a motorway[J]. IFAC-PapersOnLine, 2016, 49(11): 115-120. |
| [12] |
HEGDE J, HENRIKSEN E H, UTNE I B, et al. Development of safety envelopes and subsea traffic rules for autonomous remotely operated vehicles[J]. Journal of Loss Prevention in the Process Industries, 2019, 60: 145-158.
doi: 10.1016/j.jlp.2019.03.006 URL |
| [13] | 徐国华, 段国强, 童剑, 等. 智能水下机器人自救模糊专家系统研究[J]. 中国造船, 2004, 45(12): 271-275. |
| XU Guohua, DUAN Guoqiang, TONG Jian, et al. Fuzzy expert system of AUV self rescue[J]. Shipbuilding of China, 2004, 45(12): 271-275. | |
| [14] | 陈柱, 徐国华, 王冠学, 等. AUV主动应急自救机制与策略[J]. 中国舰船研究, 2018, 13(6): 120-127. |
| CHEN Zhu, XU Guohua, WANG Guanxue, et al. AUV emergency self-rescue mechanism and strategy[J]. Chinese Journal of Ship Research, 2018, 13(6): 120-127. | |
| [15] |
QIN H, CHEN H, SUN Y, et al. Distributed finite-time fault-tolerant containment control for multiple ocean bottom flying node systems with error constraints[J]. Ocean Engineering, 2019, 189: 106341.
doi: 10.1016/j.oceaneng.2019.106341 URL |
| [16] |
ZHAO L, YU J, LIN C, et al. Distributed adaptive fixed-time consensus tracking for second-order multi-agent systems using modified terminal sliding mode[J]. Applied Mathematics and Computation, 2017, 312: 23-35.
doi: 10.1016/j.amc.2017.05.049 URL |
| [17] |
BECHLIOULIS C P, ROVITHAKIS G A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance[J]. IEEE Transactions on Automatic Control, 2008, 53(9): 2090-2099.
doi: 10.1109/TAC.2008.929402 URL |
| [18] |
CHEN L, CUI R, YANG C, et al. Adaptive neural network control of underactuated surface vessels with guaranteed transient performance: Theory and experimental results[J]. IEEE Transactions on Industrial Electronics, 2020, 67(5): 4024-4035.
doi: 10.1109/TIE.2019.2914631 URL |
| [19] |
DAI S, HE S, WANG M, et al. Adaptive neural control of underactuated surface vessels with prescribed performance guarantees[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 30(12): 3686-3698.
doi: 10.1109/TNNLS.2018.2876685 URL |
| [20] |
ZHENG Z. Moving path following control for a surface vessel with error constraint[J]. Automatica, 2020, 118: 109040.
doi: 10.1016/j.automatica.2020.109040 URL |
| [21] | 于曹阳. 基于模糊逼近补偿法的AUV位形切换饱和跟踪控制研究[D]. 武汉: 华中科技大学, 2018. |
| [1] | 穆建彬,杨海丽,何德峰. 基于控制屏障函数的自主移动机器人安全编队分布式模型预测控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [2] | 徐春晖1, 2, 周仕昊1, 2, 4, 祁 彧1, 2, 方 田1, 2, 3, 杨士霖1, 2, 3. 基于深海多目标搜寻任务的AUV路径规划方法研究[J]. 海洋工程装备与技术, 2024, 11(4): 95-102. |
| [3] | 曹添, 张显库. 船舶纵向运动多输入多输出不稳定系统的非线性反馈控制[J]. 上海交通大学学报, 2023, 57(8): 972-980. |
| [4] | 吴利红, 封锡盛, 叶作霖, 李一平. 自主水下机器人强制自航下潜的类物理模拟[J]. 上海交通大学学报, 2021, 55(3): 290-296. |
| [5] | 庞师坤,梁晓锋,李英辉,易宏. 基于零空间行为法的自主水下机器人避障策略[J]. 上海交通大学学报, 2020, 54(3): 295-304. |
| [6] | 王鉴, 赵宏宇, 钟继鸿, 王孟渝, 蔡志俊. 临近空间飞行器的鲁棒控制器设计[J]. 空天防御, 2019, 2(3): 53-58. |
| [7] | 何常玉,施光林,郭秦阳,王冬梅. 阀控非对称液压缸位置控制系统自适应鲁棒控制策略[J]. 上海交通大学学报(自然版), 2019, 53(2): 209-216. |
| [8] | 孙文达, 李平, 方舟. 基于LPV动态逆的D稳定H2/H∞混合鲁棒控制无人直升机巡航[J]. 上海交通大学学报, 2015, 49(11): 1647-1654. |
| [9] | 徐张宝,马大为,姚建勇,董振乐,杨贵超. 基于干扰估计的直流电动机间接自适应鲁棒控制[J]. 上海交通大学学报(自然版), 2015, 49(09): 1281-1287. |
| [10] | 朱冬健a,马宁a,b,顾解忡a,b. 船舶航向非线性系统自适应模糊补偿控制[J]. 上海交通大学学报(自然版), 2015, 49(02): 250-254. |
| [11] | 苏玉民1, 曹建1, 徐锋2, 张国成1. 鱼雷形水下机器人非线性航迹跟踪控制 [J]. 上海交通大学学报(自然版), 2012, 46(06): 977-983. |
| [12] | 张民, 陈欣, 陆宇平, 臧月进. 基于μ综合方法的空空导弹鲁棒驾驶仪设计[J]. 上海交通大学学报(自然版), 2011, 45(03): 418-422. |
| [13] | 曲鑫,任章,宋剑爽,王俊波,宋勋. 基于扰动观测器的高超飞行器建模及控制 [J]. 上海交通大学学报(自然版), 2011, 45(02): 272-0276. |
| [14] | 杨帆,彭波,陈陈,王西田,徐英新,史慧杰,沈粱. 基于扫频法的直流附加控制器设计[J]. 上海交通大学学报(自然版), 2008, 42(12): 2010-2014. |
| [15] | 吴军生,翁正新,田作华,施颂椒. 一种变时滞不确定系统鲁棒可靠控制的线性矩阵不等式方法[J]. 上海交通大学学报(自然版), 2008, 42(10): 1712-1716. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||