上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (2): 165-172.doi: 10.16183/j.cnki.jsjtu.2020.424
所属专题: 《上海交通大学学报》2022年“船舶海洋与建筑工程”专题
丁明1, 孟帅1( ), 王书恒1, 夏玺2
), 王书恒1, 夏玺2
收稿日期:2020-12-14
出版日期:2022-02-28
发布日期:2022-03-03
通讯作者:
孟帅
E-mail:mengshuai001@sjtu.edu.cn
作者简介:丁明(1997-),男,山东省青岛市人,硕士生,从事波浪补偿平台研究.
基金资助:
DING Ming1, MENG Shuai1(), WANG Shuheng1, XIA Xi2
Received:2020-12-14
Online:2022-02-28
Published:2022-03-03
Contact:
MENG Shuai
E-mail:mengshuai001@sjtu.edu.cn
摘要:
六自由度波浪补偿平台所采用的大长径比非对称液压系统在深海区需完成大跨度、高速度的波浪补偿任务,这为控制系统的控制精度和抗干扰能力带来严峻的挑战.引入径向基神经网络(RBFNN)辨识,提出一种自适应反馈线性化控制策略.首先,建立六自由度波浪补偿平台非对称液压系统的非线性模型.然后,基于RBFNN辨识利用反馈线性化设计自适应控制器.最后,利用MATLAB/Simulink开展五级海浪(90°遭遇角恶劣工况)作用下和外力干扰下的仿真分析.结果表明:相比于经典比例系数-积分系数-微分系数(PID)和滑模控制,新型控制器控制精度和抗干扰能力明显提高,更适合用于复杂海况下六自由度波浪补偿平台的控制,且具有很好的跟踪效果和较强的稳健性,可为深海区六自由度波浪补偿平台控制系统设计提供参考.
中图分类号:
丁明, 孟帅, 王书恒, 夏玺. 六自由度波浪补偿平台的神经网络自适应反馈线性化控制[J]. 上海交通大学学报, 2022, 56(2): 165-172.
DING Ming, MENG Shuai, WANG Shuheng, XIA Xi. Neural-Network-Based Adaptive Feedback Linearization Control for 6-DOF Wave Compensation Platform[J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 165-172.
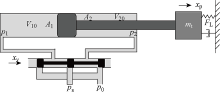
图1
非对称式液压系统的结构原理图
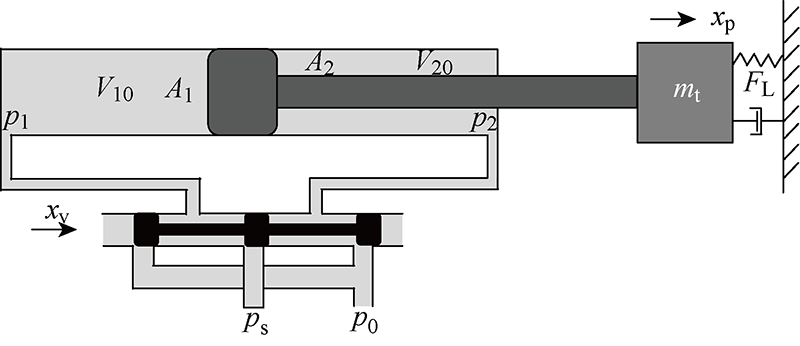
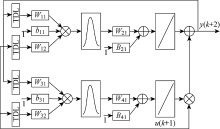
图2
RBFNNNARMA_L2辨识模型

图3
RBFNN反馈线性化自适应控制系统框图
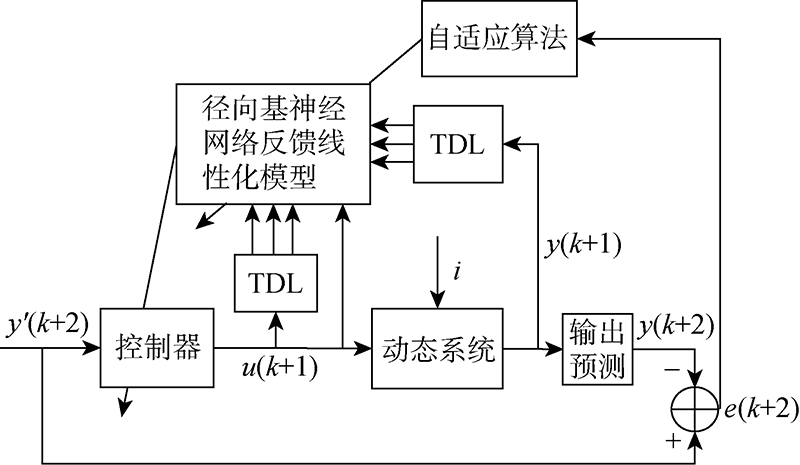

图4
阶跃干扰信号跟随和误差曲线
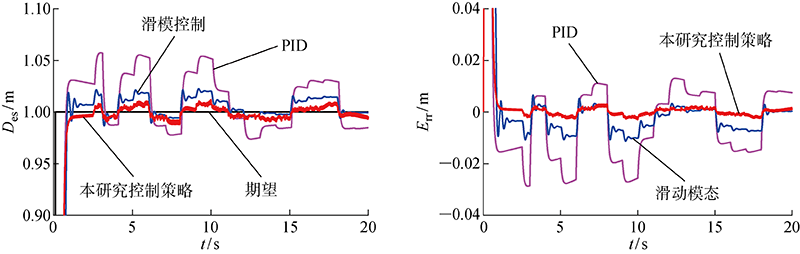
图5
五级海浪波形曲线
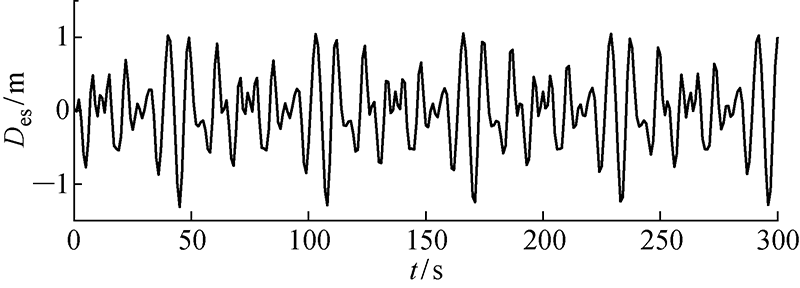
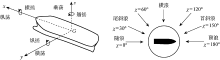
图6
船体的六自由度和遭遇角
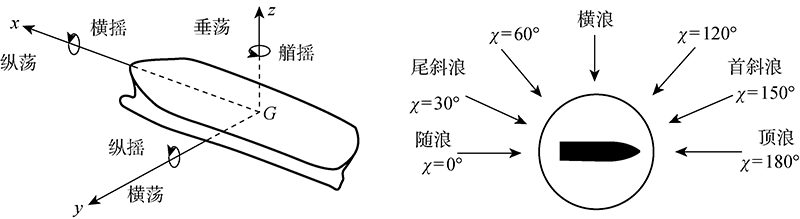
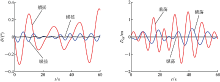
图7
船体在五级海浪下90° 遭遇角时的海浪响应
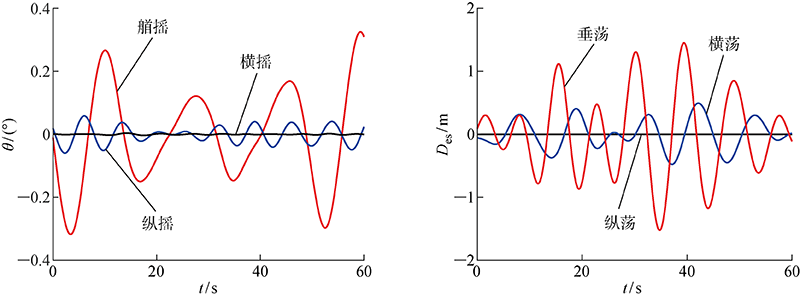

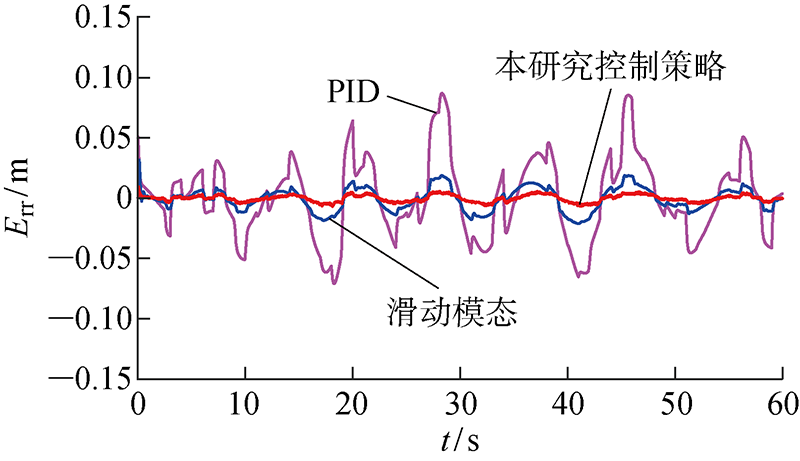
图8
五级海浪信号跟踪误差曲线
| [1] | HASHIMOTO K, WATANABE M, TASHIRO S, et al. Missing of the ROV Kaiko vehicle-problem on the secondary cable[J]. Oceans, 2004(2):804-811. |
| [2] | SALZMANN D J. Ampelmann: Development of the access system for offshore wind turbines[M]. Oisterwijk: BOX Press, 2010: 133-162. |
| [3] | 胡永攀. 六自由度并联波浪补偿系统设计与控制关键技术研究[D]. 长沙: 国防科学技术大学, 2015. |
| HU Yongpan. Research on key technologies of design and control of parallel weave compensation system with six DOFs[D]. Changsha: National University of Defense Technology, 2015. | |
| [4] | 赵华, 唐文献, 李存军, 等. 基于反馈线性化的电液伺服系统线性二次型最优控制[J]. 机床与液压, 2016, 44(19):51-55. |
| ZHAO Hua, TANG Wenxian, LI Cunjun, et al. Linear quadratic optimal control of electro-hydraulic servo system based on feedback linearization[J]. Machine Tool & Hydraulics, 2016, 44(19):51-55. | |
| [5] | 何常玉, 施光林, 郭秦阳, 等. 阀控非对称液压缸位置控制系统自适应鲁棒控制策略[J]. 上海交通大学学报, 2019, 53(2):209-216. |
| HE Changyu, SHI Guanglin, GUO Qinyang, et al. Adaptive robust control strategy of valve controlled asymmetric cylinder position control system[J]. Journal of Shanghai Jiao Tong University, 2019, 53(2):209-216. | |
| [6] | 高翔, 冯正进. 电液伺服系统研究中的非线性分析方法[J]. 上海交通大学学报, 2002, 36(3):306-310. |
| GAO Xiang, FENG Zhengjin. Nonlinear analysis method for research of electro-hydraulic servo system[J]. Journal of Shanghai Jiao Tong University, 2002, 36(3):306-310. | |
| [7] | 苗中华, 王旭永, 刘成良, 等. 基于滑模变结构控制的液压伺服系统超低速轨迹跟踪[J]. 上海交通大学学报, 2008, 42(7):1182-1186. |
| MIAO Zhonghua, WANG Xuyong, LIU Chengliang, et al. The trajectory tracking of hydraulic servo system via sliding mode variable structure control in very low velocity[J]. Journal of Shanghai Jiao Tong University, 2008, 42(7):1182-1186. | |
| [8] |
ŞAHIN S. Learning feedback linearization using artificial neural networks[J]. Neural Processing Letters, 2016, 44(3):625-637.
doi: 10.1007/s11063-015-9484-8 URL |
| [9] | 贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9):890-897. |
| HE Hongwei, ZOU Zaojian, ZENG Zhihua. Adaptive NN-SM control for path following of underactuated surface vessels[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9):890-897. | |
| [10] | 李成刚, 崔文, 尤晶晶, 等. 多连杆柔性关节机器人的神经网络自适应反演控制[J]. 上海交通大学学报, 2016, 50(7):1095-1101. |
| LI Chenggang, CUI Wen, YOU Jingjing, et al. Neural network adaptive backstepping control of multi-link flexible-joint robots[J]. Journal of Shanghai Jiao Tong University, 2016, 50(7):1095-1101. | |
| [11] | 黄新民, 吴智政, 许晓鸣. 一类非线性系统反馈线性化的遗传神经网络实现[J]. 上海交通大学学报, 1997, 31(6):40-44. |
| HUANG Xinmin, WU Zhizheng, XU Xiaoming. Linearising feedback of one class of nonlinear system with application of genetic evoloved neural network[J]. Journal of Shanghai Jiao Tong University, 1997, 31(6):40-44. | |
| [12] | 宋学伟, 马玲玲, 黄天仑, 等. T形管液压成形自适应径向基函数优化设计[J]. 上海交通大学学报, 2017, 51(11):1340-1347. |
| SONG Xuewei, MA Lingling, HUANG Tianlun, et al. The loading path optimization for T-shape tube hydroforming using adaptive radial basis function[J]. Journal of Shanghai Jiao Tong University, 2017, 51(11):1340-1347. | |
| [13] | 钟有博. 六自由度并联平台的建模与仿真研究[D]. 天津: 天津工业大学, 2016. |
| ZHONG Youbo. Modeling and simulation of 6-DOF parallel platform[D]. Tianjin: Tianjin Polytechnic University, 2016. | |
| [14] |
WEI Y, WANG A, HAN H. Ocean wave active compensation analysis of inverse kinematics for hybrid boarding system based on fuzzy algorithm[J]. Ocean Engineering, 2019, 182:577-583.
doi: 10.1016/j.oceaneng.2019.03.059 URL |
| [15] | TAGHIRAD H D. Parallel robots[M]. Boca Raton: CRC Press, 2013. |
| [16] |
YANG J, CHEN Z X, ZENG L, et al. Uniform switched control strategy of valve-controlled asymmetric hydraulic system[J]. The Journal of Engineering, 2019, 2019(13):314-318.
doi: 10.1049/tje2.v2019.13 URL |
| [17] |
NARENDRA K S, MUKHOPADHYAY S. Adaptive control using neural networks and approximate models[J]. IEEE Transactions on Neural Networks, 1997, 8(3):475-485.
doi: 10.1109/TNN.72 URL |
| [18] |
PEDRO J O, DANGOR M, DAHUNSI O A, et al. Dynamic neural network-based feedback linearization control of full-car suspensions using PSO[J]. Applied Soft Computing, 2018, 70:723-736.
doi: 10.1016/j.asoc.2018.06.002 URL |
| [19] |
FAN Y J, HUANG X, WANG Z, et al. Improved quasi-synchronization criteria for delayed fractional-order memristor-based neural networks via linear feedback control[J]. Neurocomputing, 2018, 306:68-79.
doi: 10.1016/j.neucom.2018.03.060 URL |
| [20] |
MORENO-VALENZUELA J, MONTOYA-CHÁIREZ J, SANTIBÁÑEZ V. Robust trajectory tracking control of an underactuated control moment gyroscope via neural network-based feedback linearization[J]. Neurocomputing, 2020, 403:314-324.
doi: 10.1016/j.neucom.2020.04.019 URL |
| [21] |
NARENDRA K S, PARTHASARATHY K. Identification and control of dynamical systems using neural networks[J]. IEEE Transactions on Neural Networks, 1990, 1(1):4-27.
doi: 10.1109/72.80202 URL |
| [22] | 乔倩, 范菊. 滤波器模型对不规则海浪的模拟研究[C]//第三十一届全国水动力学研讨会论文集. 北京: 法律出版社, 2020: 818-824. |
| QIAO Qian, FAN Ju. Research on simulation of irregular sea wave with filter model[C]//Proceedings of the 31st National Symposium on Hydrodynamics. Beijing: Law Press, 2020: 818-824. | |
| [23] | YIN Y, REN H X, LIU X W. Real-time wave simulation based on wave spectrum used in marine simulator [C]//The 7th International Conference on System Simulation and Scientific Computing. Beijing: International Academic Publishers, 2008: 82-86. |
| [1] | . 类间隙滞后非线性系统复合双通道干扰估计自适应控制器设计[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 106-116. |
| [2] | 王语阳, 张琛, 张宇, 王一鸣, 许颇, 蔡旭. 提升弱网有功稳定输出能力的光伏逆变器Q-V下垂系数在线调整方法[J]. 上海交通大学学报, 2025, 59(6): 845-856. |
| [3] | 王超, 路锋涛. 高压柱塞泵维修改造技术的研究与应用[J]. 海洋工程装备与技术, 2025, 12(2): 59-63. |
| [4] | 耿宗盛1,赵东东1, 2,周兴文1,闫磊1, 阎石1, 2. 基于全分布式事件驱动控制的多智能体系统领导-跟随一致性研究[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 640-645. |
| [5] | 张 捷, 龙小品, 邓驰誉, 李 晶, 孟志伟. 深水油气田水下控制模块出厂测试方案研究[J]. 海洋工程装备与技术, 2024, 11(3): 49-56. |
| [6] | 刘宇, 文利燕, 姜斌, 马亚杰, 崔玉康. 切换拓扑下异构多智能体系统自适应输出一致性[J]. 上海交通大学学报, 2024, 58(11): 1805-1815. |
| [7] | 王向磊, 刘秀全, 刘兆伟, 畅元江, 陈国明. 系统不确定的深海钻井立管解脱反冲智能控制[J]. 上海交通大学学报, 2024, 58(11): 1698-1706. |
| [8] | 卜强生, 吕朋蓬, 李炜祺, 罗飞, 俞婧雯, 窦晓波, 胡秦然. 基于SLM-RBF的配电网分布式光伏集群智能划分策略[J]. 上海交通大学学报, 2024, 58(10): 1534-1543. |
| [9] | 钟科星, 丁乐声, 张 聪, 毛彦东, 陈金龙. 基于神经网络的风电海缆弯曲限制器优化设计[J]. 海洋工程装备与技术, 2024, 11(1): 70-76. |
| [10] | 董 磊, 梁腾飞. 复杂管路串油方案设计探析[J]. 海洋工程装备与技术, 2023, 10(3): 48-51. |
| [11] | 张文安, 高伟展, 刘安东. 基于动态运动原语和自适应控制的机器人技能学习[J]. 上海交通大学学报, 2023, 57(3): 354-365. |
| [12] | 金皓纯, 葛敏辉, 徐波. 基于极限学习机的双馈感应风力发电机综合自适应调频参数优化方法[J]. 上海交通大学学报, 2021, 55(S2): 42-50. |
| [13] | 付昊, 周波华, 马萌晨. 可规定性能的自适应滑模制导律[J]. 空天防御, 2020, 3(3): 63-70. |
| [14] | 姚来鹏, 侯保林, 刘曦. 采用摩擦补偿的弹药传输机械臂自适应终端滑模控制[J]. 上海交通大学学报, 2020, 54(2): 144-151. |
| [15] | 郭秦阳,施光林,王冬梅. 间歇激励条件下电液伺服系统的复合自适应控制[J]. 上海交通大学学报, 2019, 53(6): 639-646. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||