上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (S2): 98-102.doi: 10.16183/j.cnki.jsjtu.2021.S2.016
杨逸文, 贺越生( ), 王春香, 杨明
), 王春香, 杨明
收稿日期:2021-09-14
出版日期:2021-12-28
发布日期:2022-01-24
通讯作者:
贺越生
E-mail:heyuesh@sjtu.edu.cn
作者简介:杨逸文(1995-),男,上海市人,硕士生,研究方向为激光雷达标定与激光建图定位.
基金资助:
YANG Yiwen, HE Yuesheng(), WANG Chunxiang, YANG Ming
Received:2021-09-14
Online:2021-12-28
Published:2022-01-24
Contact:
HE Yuesheng
E-mail:heyuesh@sjtu.edu.cn
摘要:
为了解决固态激光雷达外参标定繁琐与验证其标定结果较为困难的问题,提出了一种面向固态激光雷达的简易标定与验证方法.该方法设计了一种简易的标定场和标志物,随后利用标志物完成激光雷达的角度标定,再通过测绘方法完成激光雷达的距离标定,以此来减少角度外参与距离外参的相关性,并保证标定结果的精度.最后通过比较计算得出外参误差,验证激光雷达标定结果.实验结果表明该方法合理有效,且大幅减少了激光雷达标定和验证结果所需要的设备准备时间和成本,具有一定的应用价值.
中图分类号:
杨逸文, 贺越生, 王春香, 杨明. 一种面向固态激光雷达的简易标定与验证方法[J]. 上海交通大学学报, 2021, 55(S2): 98-102.
YANG Yiwen, HE Yuesheng, WANG Chunxiang, YANG Ming. A Simple Calibration and Verification Method for Solid-State Lidar[J]. Journal of Shanghai Jiao Tong University, 2021, 55(S2): 98-102.
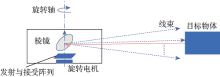
图1
机械式激光雷达的工作原理图
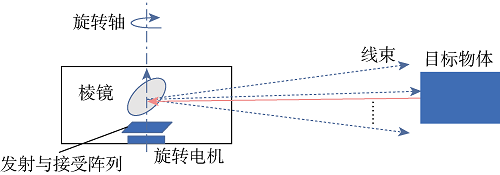
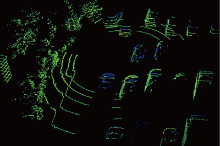
图2
机械式激光雷达的点云效果图
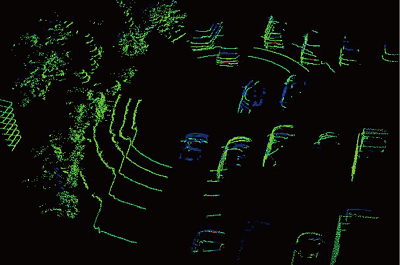

图3
混合固态激光雷达的机械结构


图4
无重复性扫描激光雷达扫描效果图
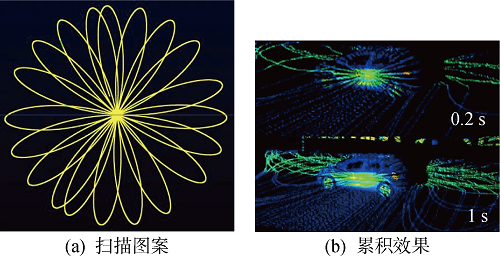
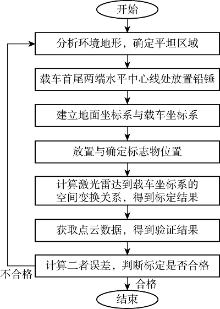
图5
标定与验证步骤框图
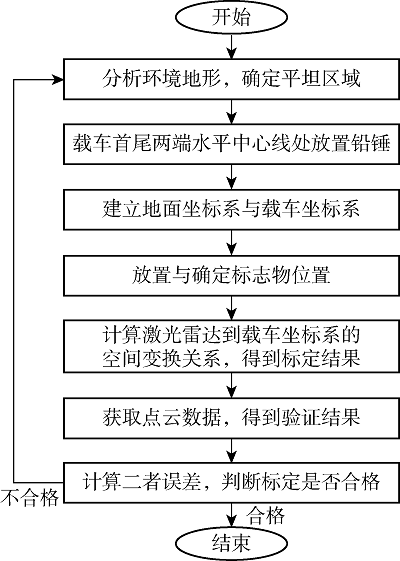

图6
标定场与标定设备示意图
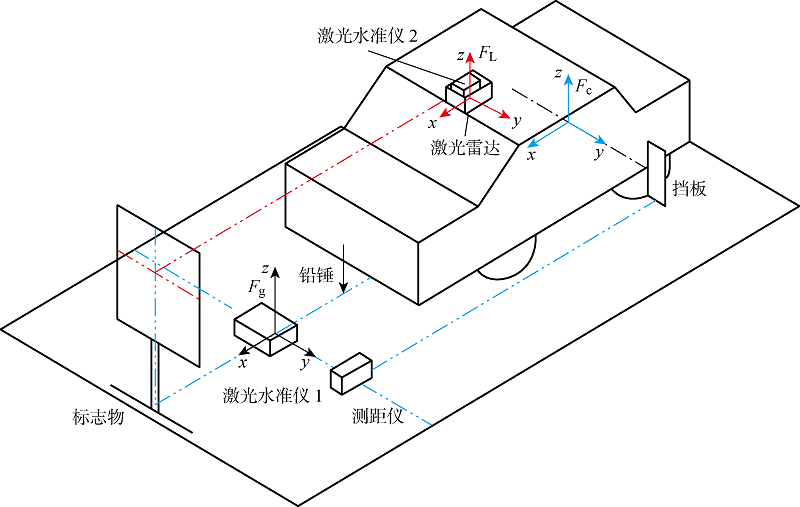

图7
标定场示意图


图8
标志物示意图
表1
激光雷达标定平均外部参数
| 外部参数 | Lidar测量结果 |
|---|---|
| tx/m | 1.08 |
| ty/m | 0.03 |
| tz/m | 1.635 |
| ϕ/( ° ) | 1.18 |
| θ/( ° ) | 2.67 |
| ψ/( ° ) | -0.61 |
表2
激光雷达标定平均验证外部参数
| 外部参数 | Lidar测量结果 |
|---|---|
| t'x/m | 1.28 |
| t'y/m | -0.1 |
| t'z/m | 1.65 |
| ϕ'/( ° ) | 1.12 |
| θ'/( ° ) | 2.83 |
| ψ'/( ° ) | -0.52 |
| [1] | ZHANG J, SINGH S. LOAM: Lidar odometry and mapping in real-time[C]// Proceedings of Robotics: Science and Systems. Berkeley, USA: IEEE, 2014: 1-9. |
| [2] | JIAO J, YU Y, LIAO Q, et al. Automatic calibration of multiple 3D LiDARs in urban environments[C]// 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. Macau, China: IEEE, 2019: 15-20. |
| [3] | UNDERWOOD J, HILL A, SCHEDING S. Calibration of range sensor pose on mobile platforms[C]// 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA: IEEE, 2007: 3866-3871. |
| [4] | GAO C, SPLETZER J R. On-line calibration of multiple LIDARs on a mobile vehicle platform[C]// 2010 IEEE International Conference on Robotics and Automation. Anchorage, AK, USA: IEEE, 2010: 279-284. |
| [5] | 吴奋陟, 郭绍刚, 朱飞虎, 等. 基于标定场的激光雷达两步标定方法[J]. 空间控制技术与应用, 2017, 43(4): 57-62. |
| WU Fenzhi, GUO Shaogang, ZHU Feihu, et al. Two-step calibration method of lidar sensor based on calibration field[J]. Aerospace Control and Application, 2017, 43(4): 57-62. | |
| [6] | LEVINSON J, THRUN S. Unsupervised calibration for multi-beam lasers[M]// Experimental robotics. Berlin, Heidelberg, Germany: Springer, 2014: 179-193. |
| [7] |
NOUIRA H, DESCHAUD J E, GOULETTE F. Target-free extrinsic calibration of a mobile multi-beam LIDAR system[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2015, II-3/W5:97-104.
doi: 10.5194/isprsannals-II-3-W5-97-2015 URL |
| [8] | FERNÁNDEZ-MORAL E, ARÉVALO V, GONZÁLEZ-JIMÉNEZ J. Extrinsic calibration of a set of 2D laser rangefinders[C]// 2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA: IEEE, 2015: 2098-2104. |
| [9] | 孙凯. 面向无人驾驶的多激光雷达耦合系统设计与实现[D]. 长春: 吉林大学, 2019. |
| SUN Kai. Design and implementation of multi-lidar coupling system for autonomous driving[D]. Changchun: Jilin University, 2019. | |
| [10] | JIAO J, LIAO Q, ZHU Y, et al. A novel dual-lidar calibration algorithm using planar surfaces[C]// 2019 IEEE Intelligent Vehicles Symposium. Paris, France: IEEE, 2019: 1499-1504. |
| [11] | 韩栋斌, 徐友春, 李华, 等. 基于手眼模型的三维激光雷达外参数标定[J]. 光电工程, 2017, 44(8): 798-804. |
| HAN Dongbin, XU Youchun, LI Hua, et al. Calibration of extrinsic parameters for three-dimensional lidar based on hand-eye model[J]. Opto-Electronic Engineering, 2017, 44(8): 798-804. | |
| [12] |
TSAI R Y, LENZ R K. A new technique for fully autonomous and efficient 3D robotics hand/eye calibration[J]. IEEE Transactions on Robotics and Automation, 1989, 5(3): 345-358.
doi: 10.1109/70.34770 URL |
| [13] | TAYLOR Z, NIETO J. Motion-based calibration of multimodal sensor arrays[C]// 2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA: IEEE, 2015: 4843-4850. |
| [14] | LIN J, LIU X, ZHANG F. A decentralized framework for simultaneous calibration, localization and mapping with multiple LiDARs[C]// 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, USA: IEEE, 2021: 4870-4877. |
| [15] | LIU Z, ZHANG F, HONG X. Low-cost retina-like robotic lidars based on incommensurable scanning[J]. IEEE/ASME Transactions on Mechatronics, 2021.https://doi.org/10.1109/TMECH.2021.3058173. |
| [1] | . 触觉辅助导航车辆:增强盲区和透明物体场景中的障碍物检测[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 167-175. |
| [2] | 麦新晨a, 杨明a, 王春香b, 王冰a. 一种基于多传感器融合的车辆检测与跟踪方法[J]. 上海交通大学学报(自然版), 2011, 45(07): 1012-1016. |
| [3] | 钱慧佳,杨明,李顥,王春香. 一种基于激光雷达和视觉的行人检测方法[J]. 上海交通大学学报(自然版), 2010, 44(07): 946-0950. |
| [4] | 伍舜喜,杨明. 基于自然柱状特征地图的智能车定位[J]. 上海交通大学学报(自然版), 2008, 42(10): 1745-1748. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||