上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (3): 290-296.doi: 10.16183/j.cnki.jsjtu.2019.191
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“交通运输工程”专题
吴利红1,2, 封锡盛2( ), 叶作霖1, 李一平2
), 叶作霖1, 李一平2
收稿日期:2019-06-30
出版日期:2021-03-01
发布日期:2021-04-02
通讯作者:
封锡盛
E-mail:fengxsh@mail.cae.ac.cn
作者简介:吴利红(1978-),女,江西省上饶市人,副教授,研究方向为水下机器人.
基金资助:
WU Lihong1,2, FENG Xisheng2(), YE Zuolin1, LI Yiping2
Received:2019-06-30
Online:2021-03-01
Published:2021-04-02
Contact:
FENG Xisheng
E-mail:fengxsh@mail.cae.ac.cn
摘要:
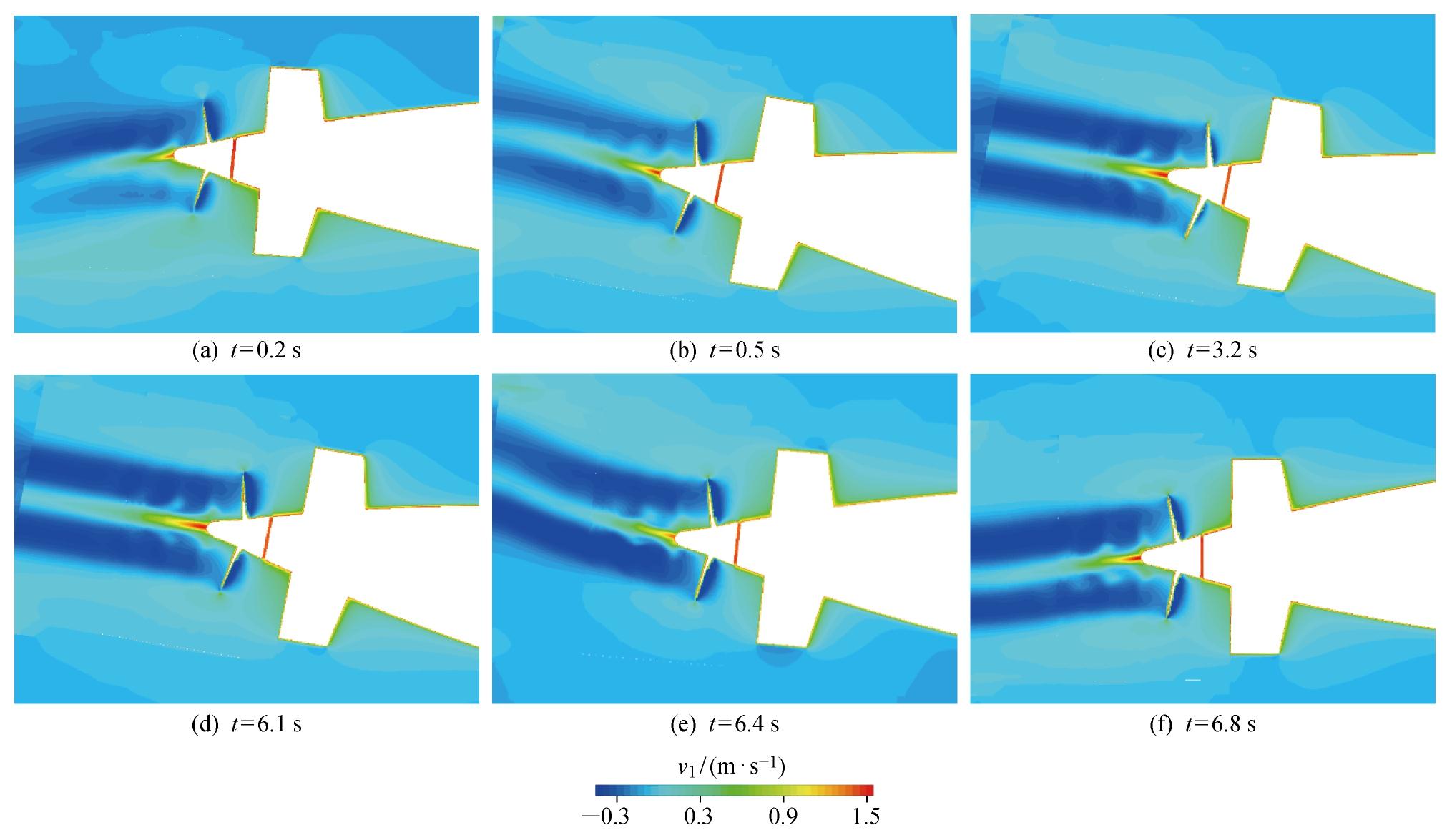
为提高自主水下机器人(AUV)下潜的安全性和稳定性,需对AUV自航下潜操纵运动进行精确预报.为此提出建立载体全物理模型,模拟螺旋桨运动,编写用户自定义函数(UDF),求解雷诺平均N-S方程,实时预报载体强制自航下潜运动受力和流动特性的类物理数值模拟方法.该方法采用多块混合网格和动区域法,能提高动网格数值模拟的精度和计算效率.数值方法通过AUV自航试验的速度对比进行了验证.将该方法应用于AUV强制自航下潜模拟,结果表明:初始启动时,载体加速度较大,将导致AUV有较大纵向和垂向阻尼;在载体纵倾变化过程中,载体垂向力幅值较大且振荡,螺旋桨尾迹有扭转趋势,螺旋桨推力变化;在载体定向直航下潜中,螺旋桨推力和载体阻力较为稳定.
中图分类号:
吴利红, 封锡盛, 叶作霖, 李一平. 自主水下机器人强制自航下潜的类物理模拟[J]. 上海交通大学学报, 2021, 55(3): 290-296.
WU Lihong, FENG Xisheng, YE Zuolin, LI Yiping. Physics-Based Simulation of AUV Forced Diving by Self-Propulsion[J]. Journal of Shanghai Jiao Tong University, 2021, 55(3): 290-296.
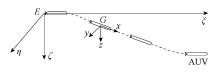
图1
AUV自航下潜示意图
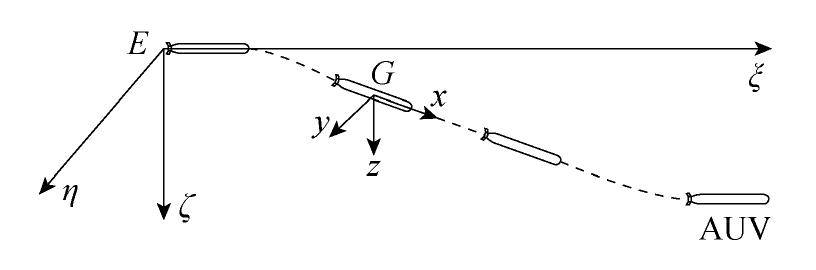
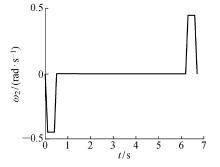
图2
AUV下潜运动角速度变化
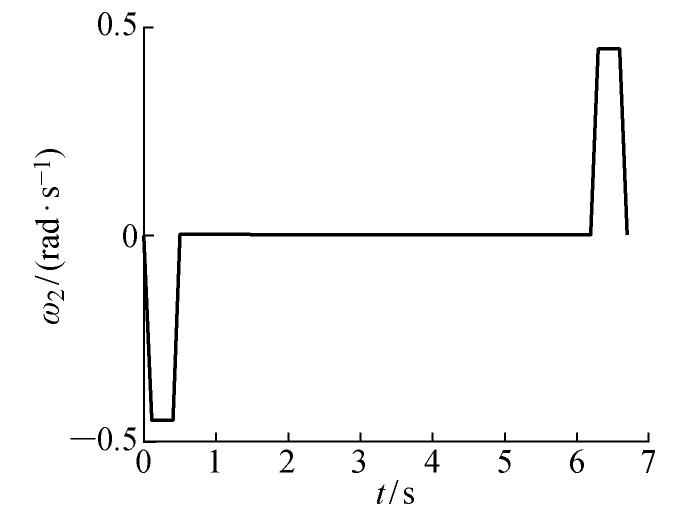
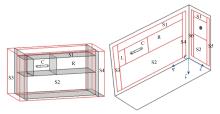
图3
AUV 下潜运动流场拓扑结构
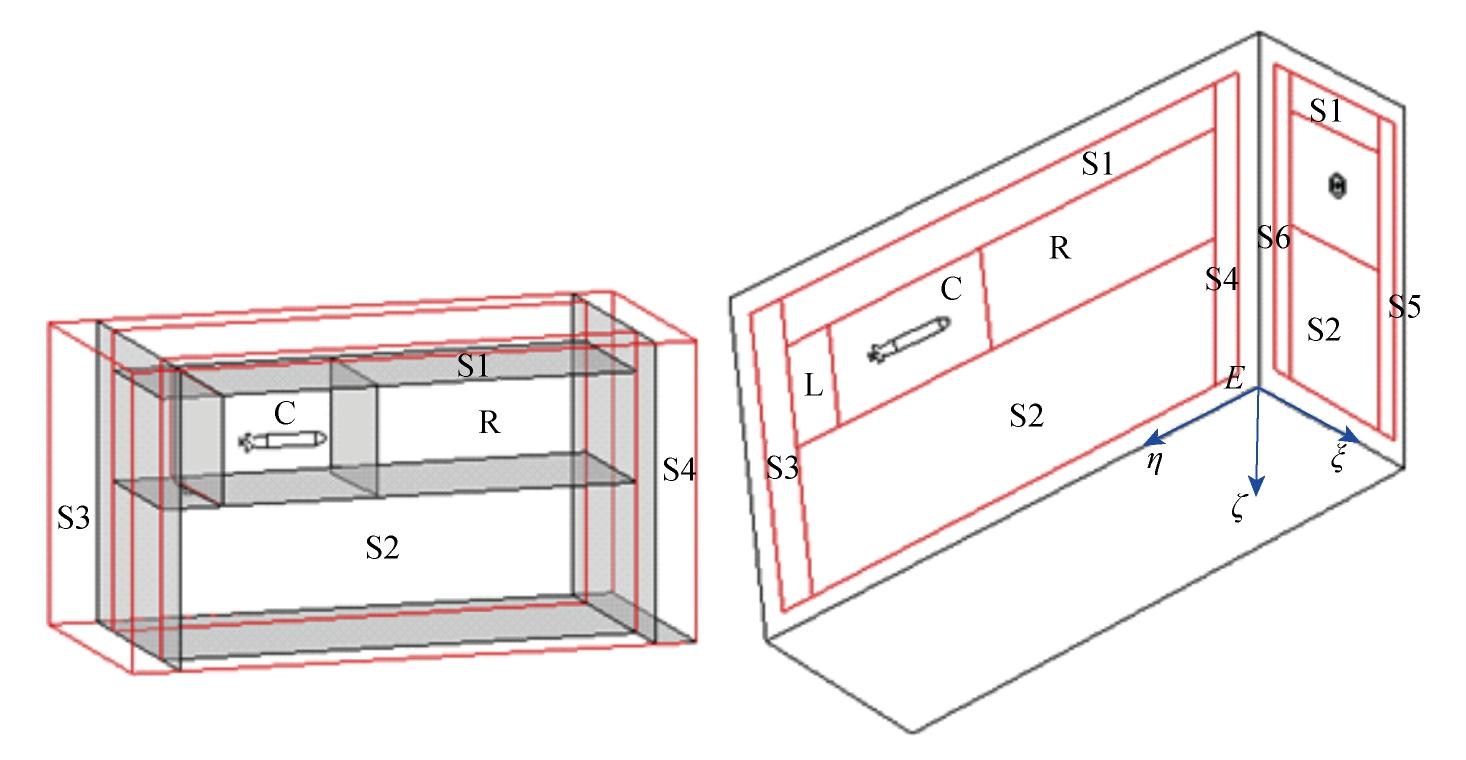
表1
网格类型和运动形式
| 区域 | 网格总数 | 网格类型 | 随AUV纵倾/移动 | 随螺旋桨旋转 | 区域 | 网格总数 | 网格类型 | 随AUV纵倾/移动 | 随螺旋桨旋转 |
|---|---|---|---|---|---|---|---|---|---|
| AUV和舵翼 | 269 320 | 六面体 | 是/是 | 否 | S1,S2 | 140 184 | 六面体 | 否/是 | 否 |
| 螺旋桨 | 652 586 | 四面体 | 是/是 | 是 | S3,S4 | 23 328 | 六面体 | 否/否 | 否 |
| C | 510 324 | 四面体 | 否/是 | 否 | S5,S6 | 96 120 | 六面体 | 否/否 | 否 |
| L,R | 175 032 | 六面体 | 否/是 | 否 | 总计 | 1 866 894 | |||

图4
AUV 网格系统
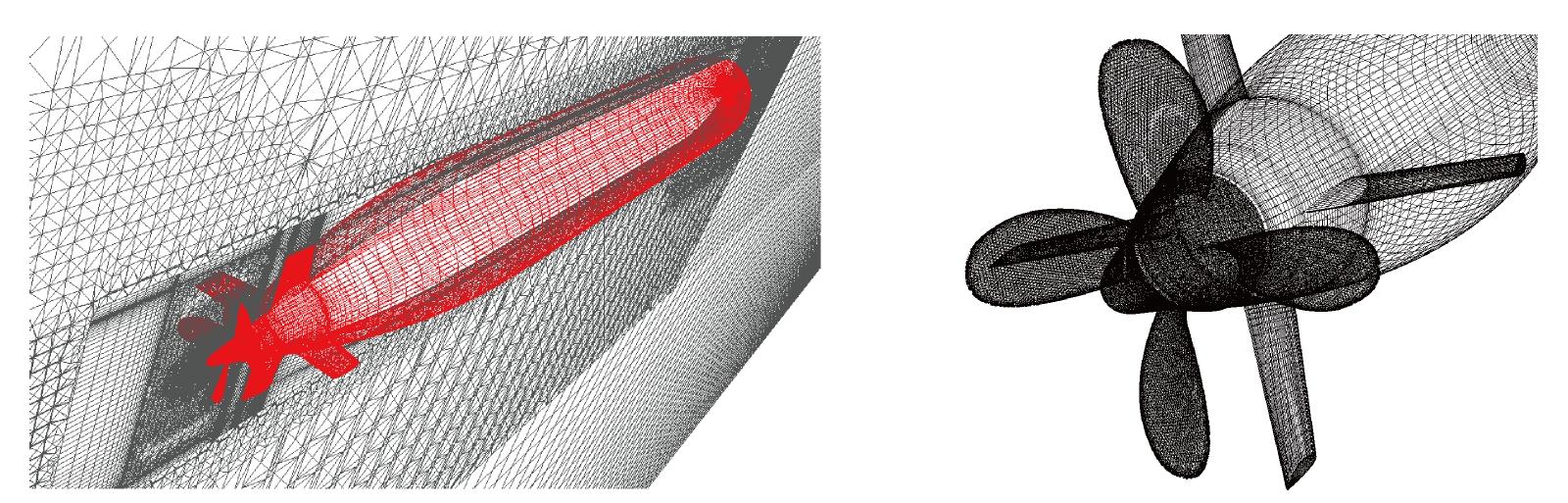
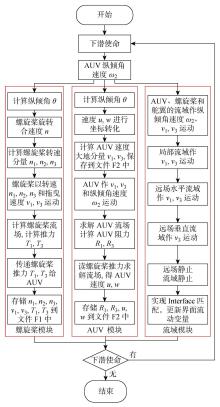
图5
AUV强制自航下潜运动流程图
图6
敞水试验的试验结果与数值结果对比
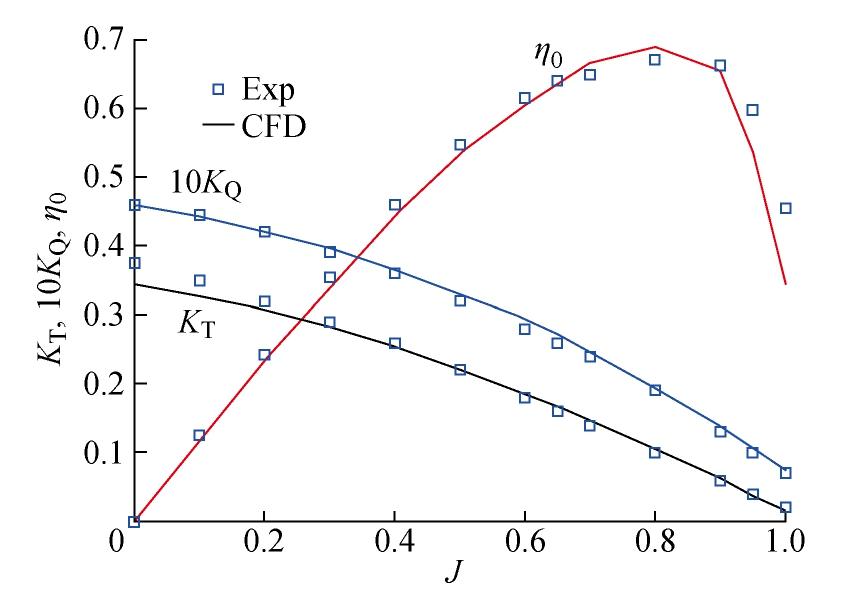
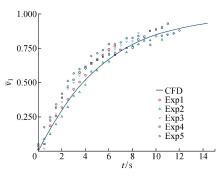
图7
AUV自航试验速度对比
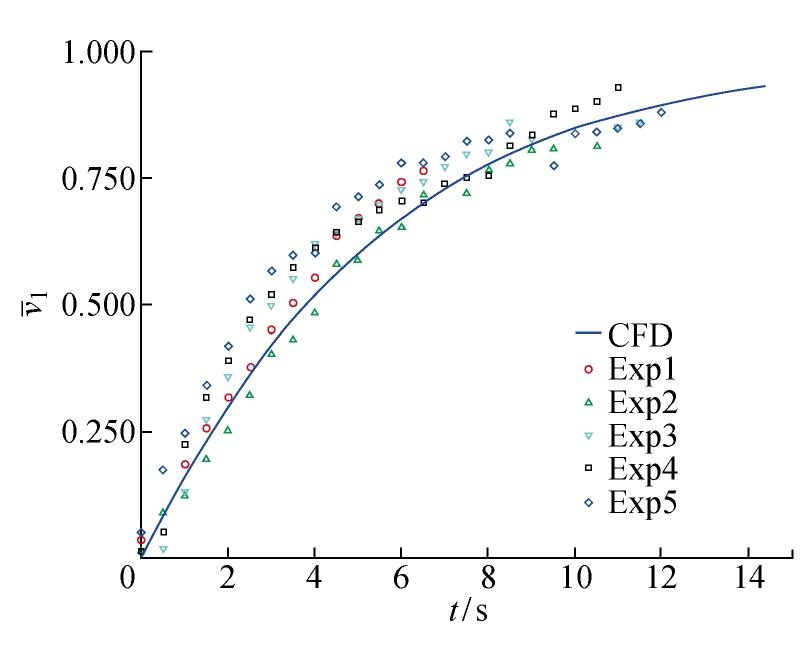

图8
不同时刻网格图(η=0平面)
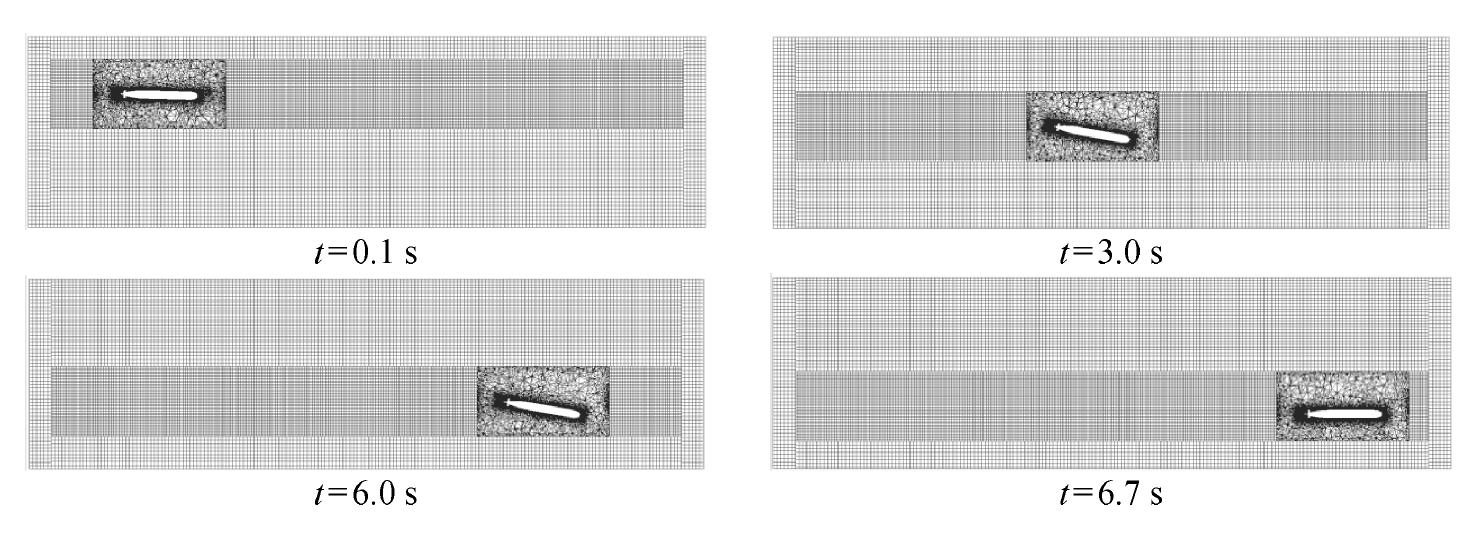
图9
AUV 在纵向和垂向的阻力
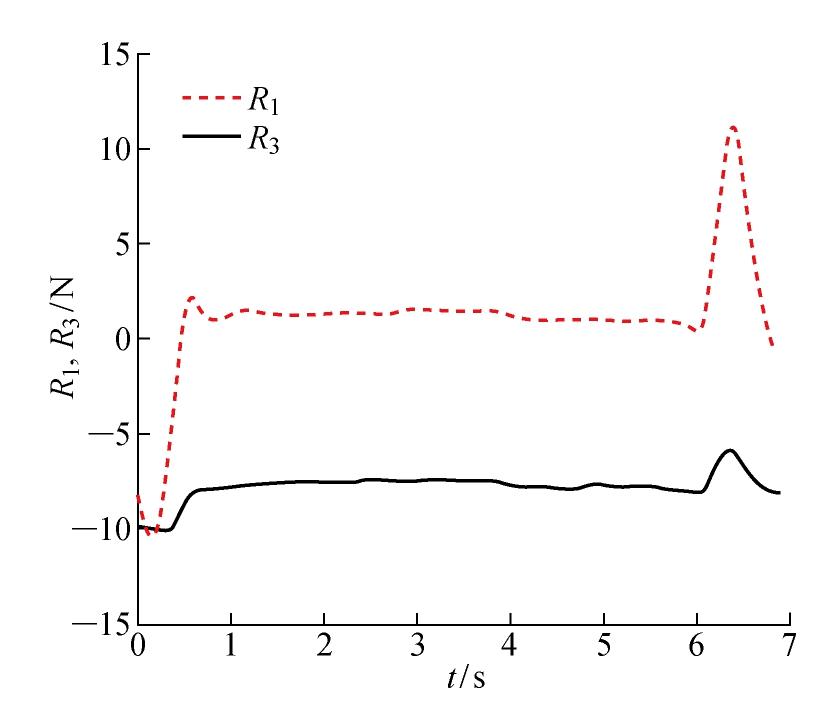

图10
螺旋桨在纵向和垂向的推力
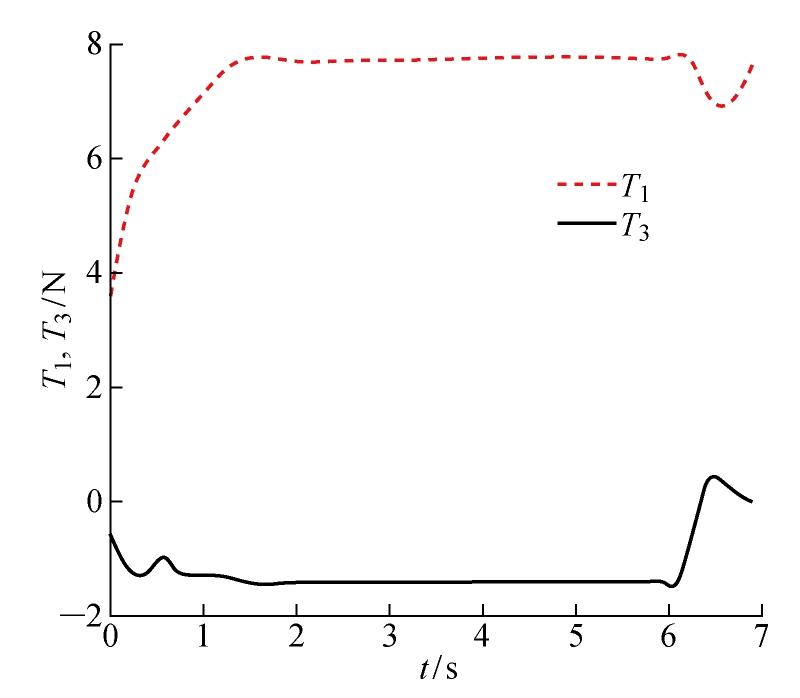
图11
不同时刻AUV尾部速度放大图
| [1] | 王波,苏玉民,秦再白.微小型水下机器人操纵性能与运动仿真研究[J].系统仿真学报,2009, 21(13): 4149-4158. |
| WANG Bo, SU Yumin, QIN Zaibai. Research on maneuverability and simulation of small autonomous underwater vehicle [J]. Journal of System Simulation, 2009, 21(13): 4149-4158. | |
| [2] | 陈江.AUV垂直面运动控制过程中自抗扰方法研究[D]. 哈尔滨: 哈尔滨工程大学,2011. |
| CHEN Jiang. Research of AUV motion control in vertical plane based on ADRC[D]. Harbin: Harbin Engineering University, 2011. | |
| [3] | 王建华,万德成.船舶操纵运动CFD数值模拟研究进展[J].哈尔滨工程大学学报,2018, 39(5): 813-824. |
| WANG Jianhua, WAN Decheng. CFD simulations of ship maneuvering motion [J]. Journal of Harbin Engineering University, 2018, 39(5): 813-824. | |
| [4] | CARRICA P M, FU H P, STERN F. Computations of self-propulsion free to sink and trim and of motions in head waves of the KRISO Container Ship (KCS) model [J]. Applied Ocean Research, 2011, 33: 309-320. |
| [5] | CARRICA P M, HOSSEINI H S, STERN F. CFD analysis of broaching for a model surface combatant with explicit simulation of moving rudders and rotating propellers[J]. Computers & Fluids, 2012, 53: 117-132. |
| [6] | CARRICA P M, ISMAIL F, HYMAN M, et al. Turn and ZigZag maneuvers of a surface combatant using a URANS approach with dynamic overset grids[J]. Journal of Marine Science and Technology, 2013, 18: 166-181. |
| [7] | CHASE N, CARRICA P M. Submarine propeller computations and application to self-propulsion of DARPA Suboff [J]. Ocean Engineering, 2013, 60: 68-80. |
| [8] | SNYDER D, KOUTSAVDIS E, ANTTONEN J. Transonic store separation using unstructured CFD with dynamic meshing [C]∥33rd AIAA Fluid Dynamics Conference and Exhibit. Orlando, Florida: AIAA, 2003, 3919: 1-8. |
| [9] | CAVALLO P A, SINHA N, FELDMAN G M. Parallel unstructured mesh adaptation for transient moving body and aero-propulsive applications[C]∥42nd AIAA Aerospace Sciences Meeting and Exhibit. RENO, Nevada: AIAA, 2004, 1057: 1-11. |
| [10] | 吴利红,封锡盛,胡志强.三维动态混合网格在AUV发射过程中的应用[J].船舶力学,2010, 14(7): 717-722. |
| WU Lihong, FENG Xisheng, HU Zhiqiang. Application of 3-D hybrid dynamic grids to simulate the flow in AUV swim-out[J]. Journal of Ship Mechanics, 2010, 14(7): 717-722. | |
| [11] | WU L H, LI Y P, SU S J, et al. Hydrodynamic analysis of AUV underwater docking with a cone-shaped dock under ocean currents [J]. Ocean Engineering, 2014, 85: 110-126. |
| [12] | ZHANG L P, DENG X G, ZHANG H X. Reviews of moving grid generation techniques and numerical methods for unsteady flow [J]. Advances in Mechanics, 2010, 40(4): 424-446. |
| [13] | ZHAN J M, CAI W H, HU W Q, et al. Numerical study on the six-DOF anchoring process of gravity anchor using a new mesh update strategy [J]. Marine Structures, 2017, 52: 173-187 |
| [14] | 魏成柱,李英辉,易宏.多面体网格在船体绕流计算中的应用[J].上海交通大学学报,2016, 50(8): 1144-1153. |
| WEI Chengzhu, LI Yinghui, YI Hong. Application of Polyhedral mesh in numerical simulation of flow around hulls[J]. Journal of Shanghai Jiao Tong University, 2016, 50(8): 1144-1153. | |
| [15] | 吴利红,李一平,刘开周,等. 基于多块动态混合网格的AUV自航类物理数值模拟[J].机器人,2019, 41(6): 706-712. |
| WU Lihong, LI Yiping, LIU Kaizhou, et al. A physics-based numerical simlulation of AUV self-propulsion using multi-block hybrid dynamic mesh method [J]. ROBOT, 2019, 41(6): 706-712. | |
| [16] | 艾晓锋.基于动网格技术的AUV自航数值模拟研究[D].大连: 大连海事大学,2017. |
| AI Xiaofeng. Numerical simulation of AUV self-propulsion based on moving mesh method [D]. Dalian: Dalian Maritime University, 2017. | |
| [17] | 盛振邦,刘应中.船舶原理(下册)[M]. 上海: 上海交通大学出版社,2005: 160-164. |
| SHENG Zhenbang, LIU Yingzhong. Ship theory (Vol.2) [M]. Shanghai: Shanghai Jiao Tong University Press, 2005: 160-164. |
| [1] | 陈振纬, 陆家林, 陈旭鹏. 叶尖侧斜与纵倾耦合对Kappel螺旋桨水动力性能的影响[J]. 上海交通大学学报, 2026, 60(3): 399-407. |
| [2] | 于凯, 成晨, 时光宇, 刘登成, 王超. 斜流条件下螺旋桨空泡特性的数值研究[J]. 上海交通大学学报, 2026, 60(3): 408-417. |
| [3] | 张舒天, 陈泽瀚, 田钰涛, 等. 模块化理念下的海上浮动基地的结构设计[J]. 海洋工程装备与技术, 2025, 12(4): 18-31. |
| [4] | 郑茂, 丁世淦, 兰加芬. 基于数值计算的非常规船型操纵运动建模[J]. 上海交通大学学报, 2025, 59(12): 1824-1836. |
| [5] | 张耕, 姚建喜. 波浪中的螺旋桨水动力性能数值分析[J]. 上海交通大学学报, 2024, 58(2): 175-187. |
| [6] | 高楠, 胡安康, 侯立勋, 常欣. 基于深度学习的螺旋桨水动力性能快速预报方法[J]. 上海交通大学学报, 2024, 58(2): 188-200. |
| [7] | 侯先瑞, 周星宇, 黄骁骋. 基于物理信息神经网络的船舶螺旋桨尾流场重构[J]. 上海交通大学学报, 2024, 58(11): 1654-1664. |
| [8] | 郭海鹏, 邹早建, 李广年. 基于OpenFOAM的螺旋桨紧急倒车工况数值模拟[J]. 上海交通大学学报, 2023, 57(2): 168-176. |
| [9] | 张嶔, 王鑫宇, 王智程, 王天源. 大角度斜流下螺旋桨与导管桨尾流场特性[J]. 上海交通大学学报, 2023, 57(11): 1432-1441. |
| [10] | 吴春晓, 卢雨, 刘社文, 顾朱浩, 邵思雨, 邵武, 李闯. 新型仿生螺旋桨优化设计[J]. 上海交通大学学报, 2023, 57(11): 1421-1431. |
| [11] | 秦广菲, 姚慧岚, 张怀新. 螺旋桨脉动压力作用下自航船舶艉部振动数值研究[J]. 上海交通大学学报, 2022, 56(9): 1148-1158. |
| [12] | 秦艺超, 黄礼敏, 王骁, 马学文, 段文洋, 郝伟. 基于人工神经网络的自航浮标测波方法可行性[J]. 上海交通大学学报, 2022, 56(4): 498-505. |
| [13] | 刘恒, 伍锐, 孙硕. 非均匀流场螺旋桨空泡数值模拟[J]. 上海交通大学学报, 2021, 55(8): 976-983. |
| [14] | 何金辉, 李明广, 陈锦剑, 夏小和. 考虑动态流体网格的颗粒-流体耦合算法[J]. 上海交通大学学报, 2021, 55(6): 645-651. |
| [15] | 张宇, 王晓亮. 基于径向点插值方法的柔性螺旋桨气动弹性模拟[J]. 上海交通大学学报, 2020, 54(9): 924-934. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||