上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (11): 1783-1797.doi: 10.16183/j.cnki.jsjtu.2024.209
所属专题: 制导、导航与控制
曹凯1,2( ), 陈阳泉2, 李康1, 陈超波1, 阎坤1, 刘伟超1
), 陈阳泉2, 李康1, 陈超波1, 阎坤1, 刘伟超1
收稿日期:2024-06-06
修回日期:2024-06-22
接受日期:2024-06-24
出版日期:2024-11-28
发布日期:2024-12-02
作者简介:曹 凯(1984—),副教授,从事多机器人控制、集群控制、源定位的研究;E-mail:caokai@xatu.edu.cn.
基金资助:
CAO Kai1,2(), CHEN Yangquan2, LI Kang1, CHEN Chaobo1, YAN Kun1, LIU Weichao1
Received:2024-06-06
Revised:2024-06-22
Accepted:2024-06-24
Online:2024-11-28
Published:2024-12-02
摘要:
针对地面移动机器人编队的队形控制问题,提出了一种基于动态密度引导的多机器人编队队形切换方法.为实现机器人编队不同队形的切换,使用质心维诺划分(CVT)编队控制算法,避免机器人队形切换过程中的碰撞.根据CVT算法的特性,通过给定队形的密度函数,构建初始队形密度函数与期望密度函数之间的过渡密度生成动态密度,并利用CVT算法引导编队中的机器人移动,完成编队队形的切换与重构.仿真结果表明,相比直接使用期望密度函数引导队形切换,该方法不仅成功解决了部分形态编队切换失败问题,而且降低了切换过程中编队整体的平均位置误差.
中图分类号:
曹凯, 陈阳泉, 李康, 陈超波, 阎坤, 刘伟超. 基于动态密度引导的多机器人编队队形变换方法[J]. 上海交通大学学报, 2024, 58(11): 1783-1797.
CAO Kai, CHEN Yangquan, LI Kang, CHEN Chaobo, YAN Kun, LIU Weichao. Dynamic Density-Guided Method for Multi-Robot Formation Transformation[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1783-1797.
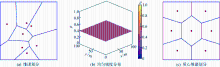
图1
维诺划分与质心维诺划分
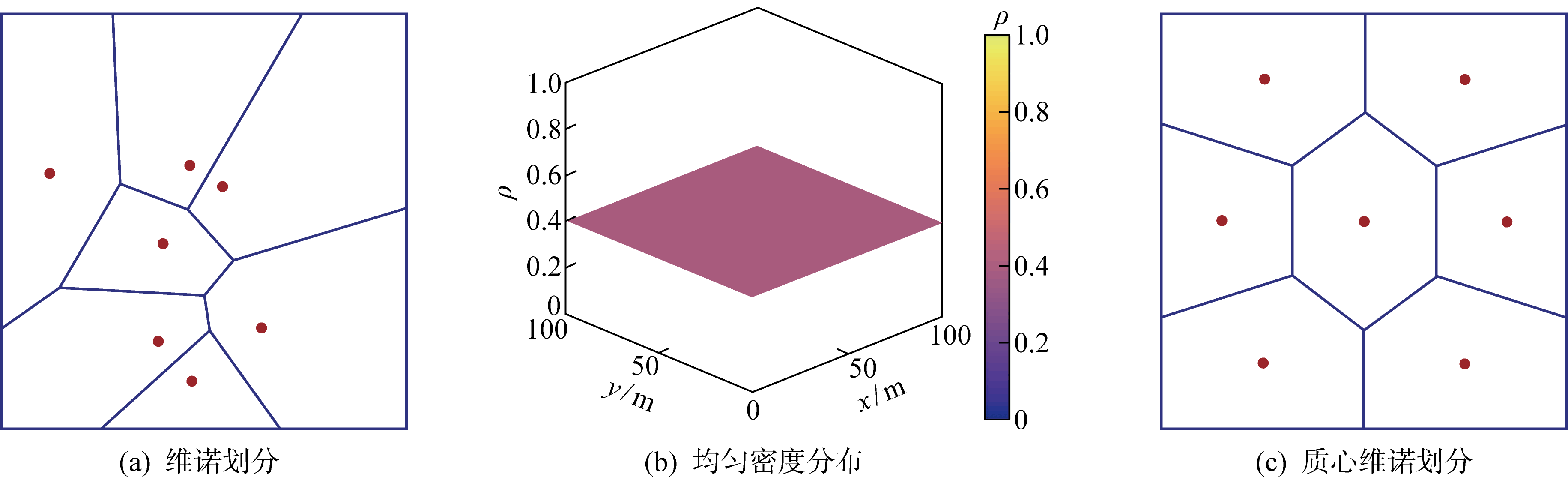
表1
密度函数与维诺图的联系
| ρ(q) | 密度分布 | 维诺图 | 队形 |
|---|---|---|---|
| $\mathrm{e}^{-\sigma(a x+b y+c)^{2}}$ |  |  | 直线形 |
| $\mathrm{e}^{-\sigma\left[a\left|x-x_{\mathrm{c}}\right|+b\left(y-y_{\mathrm{c}}\right)+c\right]^{2}}$ |  | 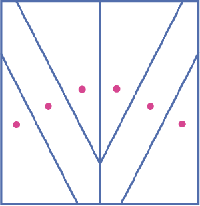 | V形 |
| $\mathrm{e}^{-\sigma\left[a\left(x-x_{\mathrm{c}}\right)^{2}+b\left(y-y_{\mathrm{c}}\right)^{2}-r^{2}\right]^{2}}$ |  | 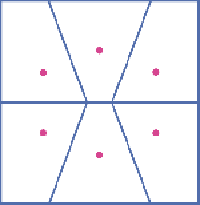 | 环形 |
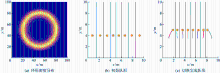
图2
环形队形切换
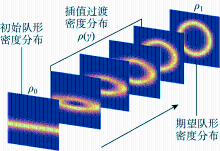
图3
密度函数形状插值
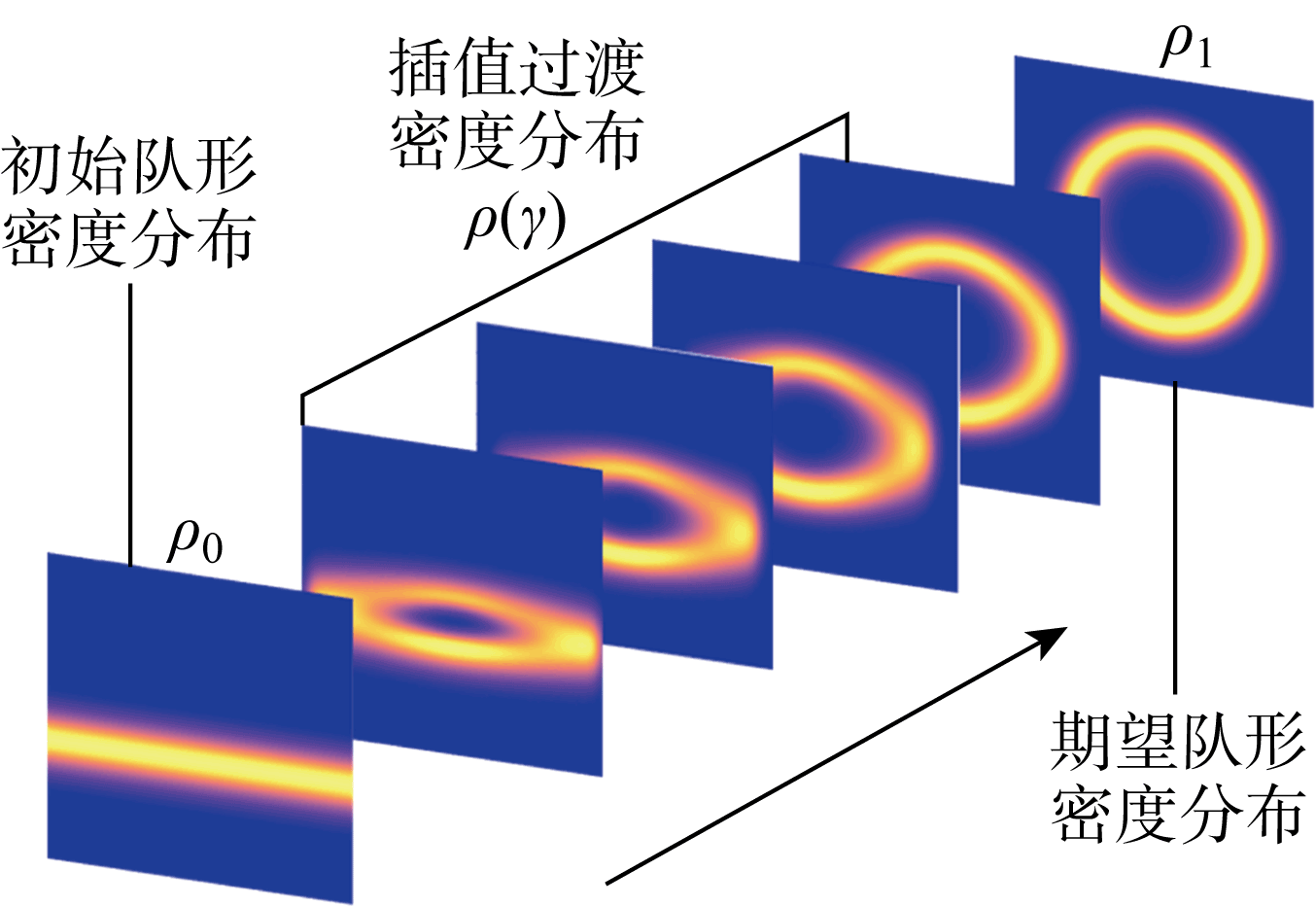
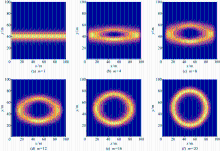
图4
直线形密度分布变环形密度分布动态过渡
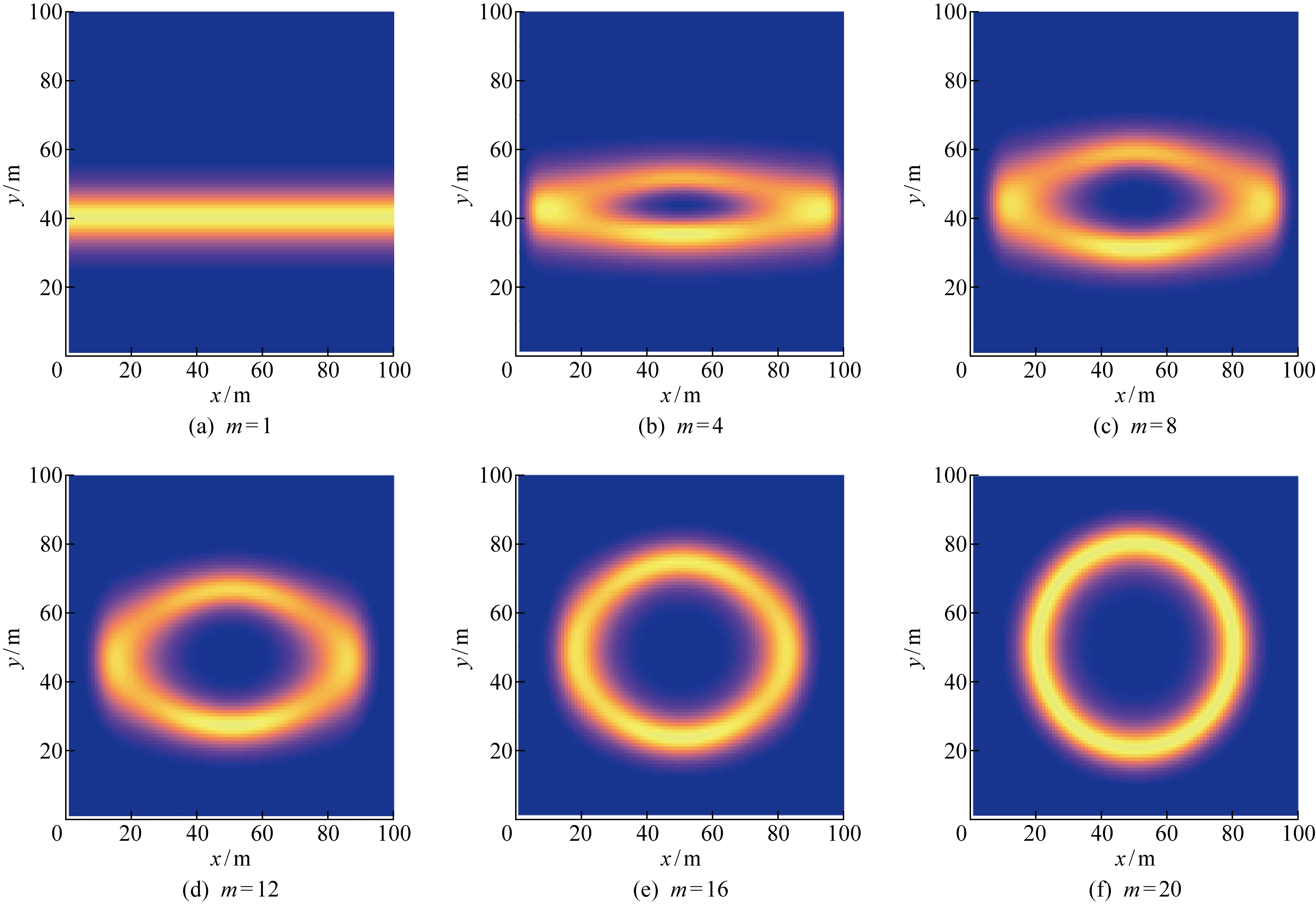
图5
仿真1动态密度引导队形切换过程
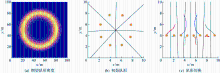
图6
直线形密度函数直接引导队形切换
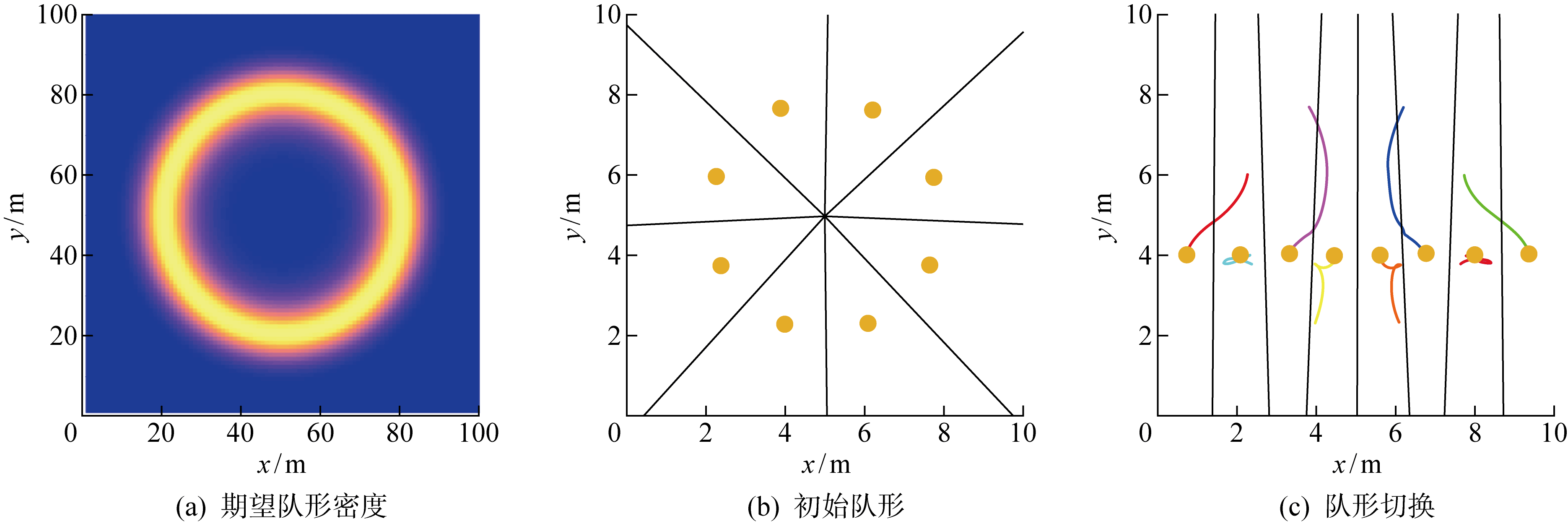
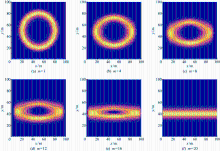
图7
环形密度分布变直线形密度分布动态过渡
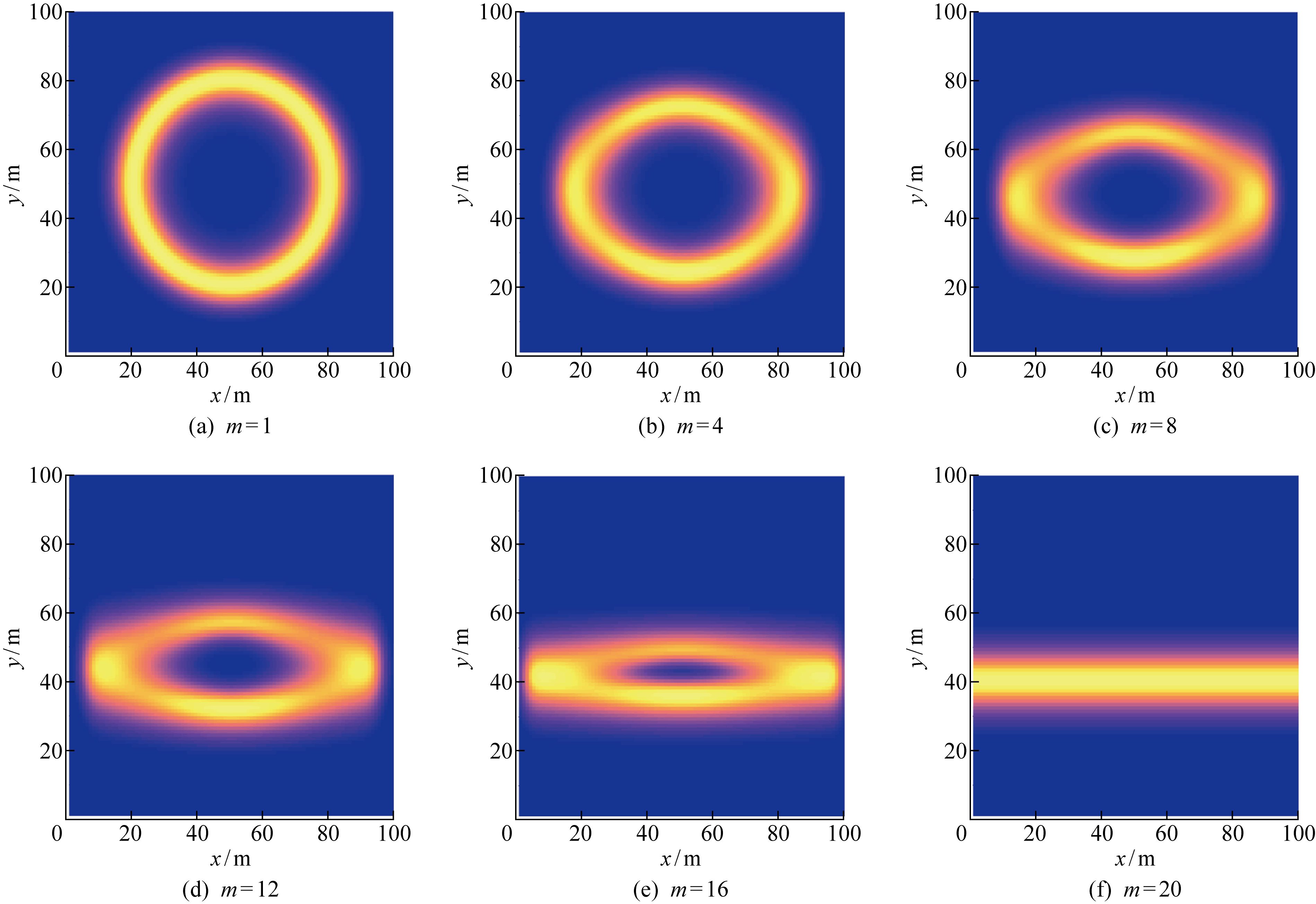
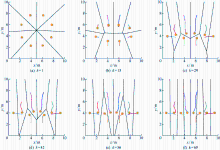
图8
仿真2动态密度引导队形切换过程
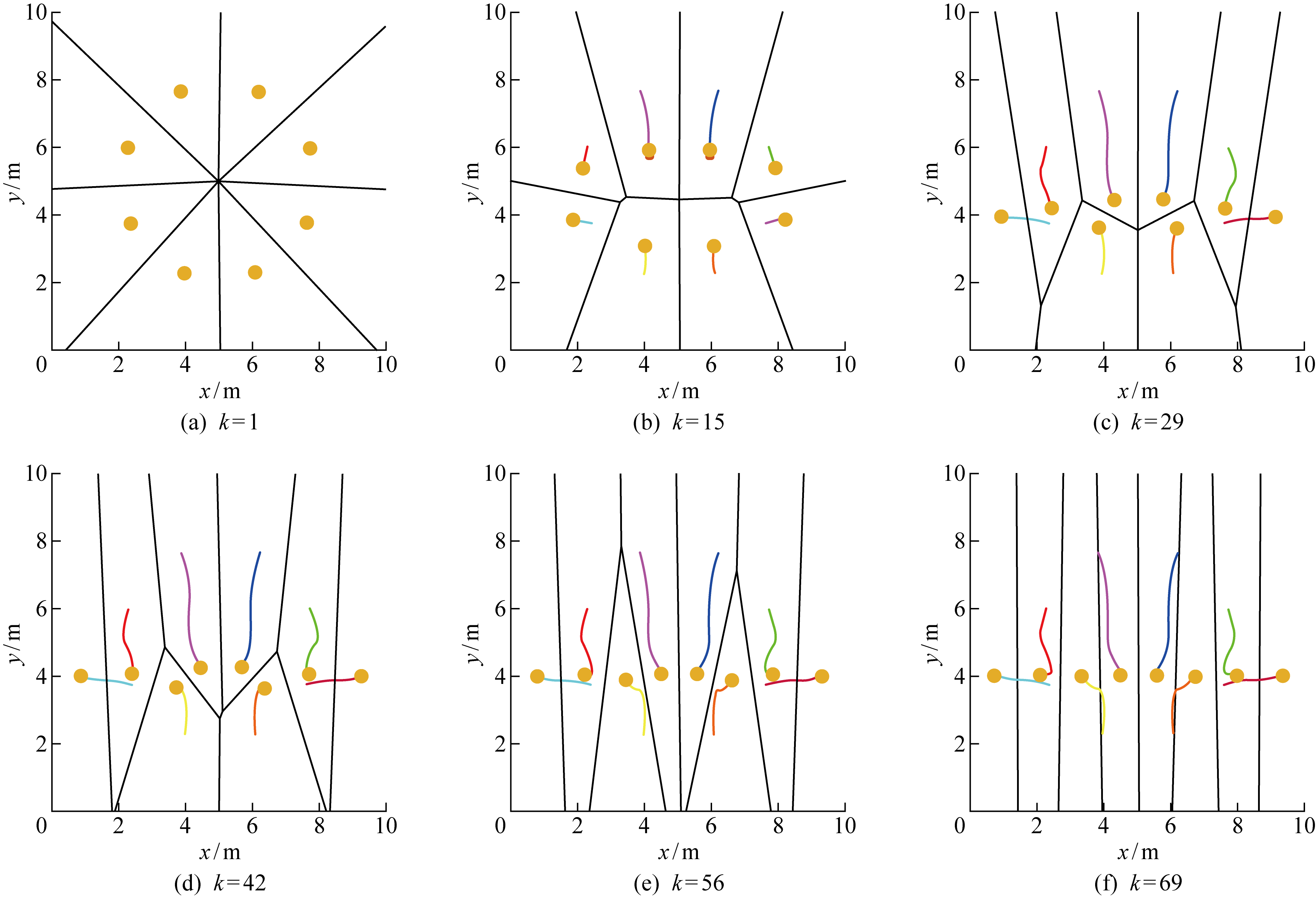
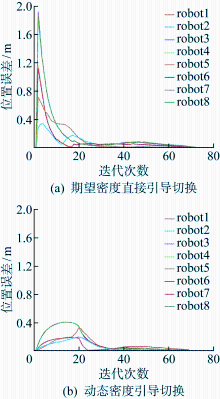
图9
仿真2队形切换过程机器人位置误差

图10
仿真2队形切换过程机器人代价函数
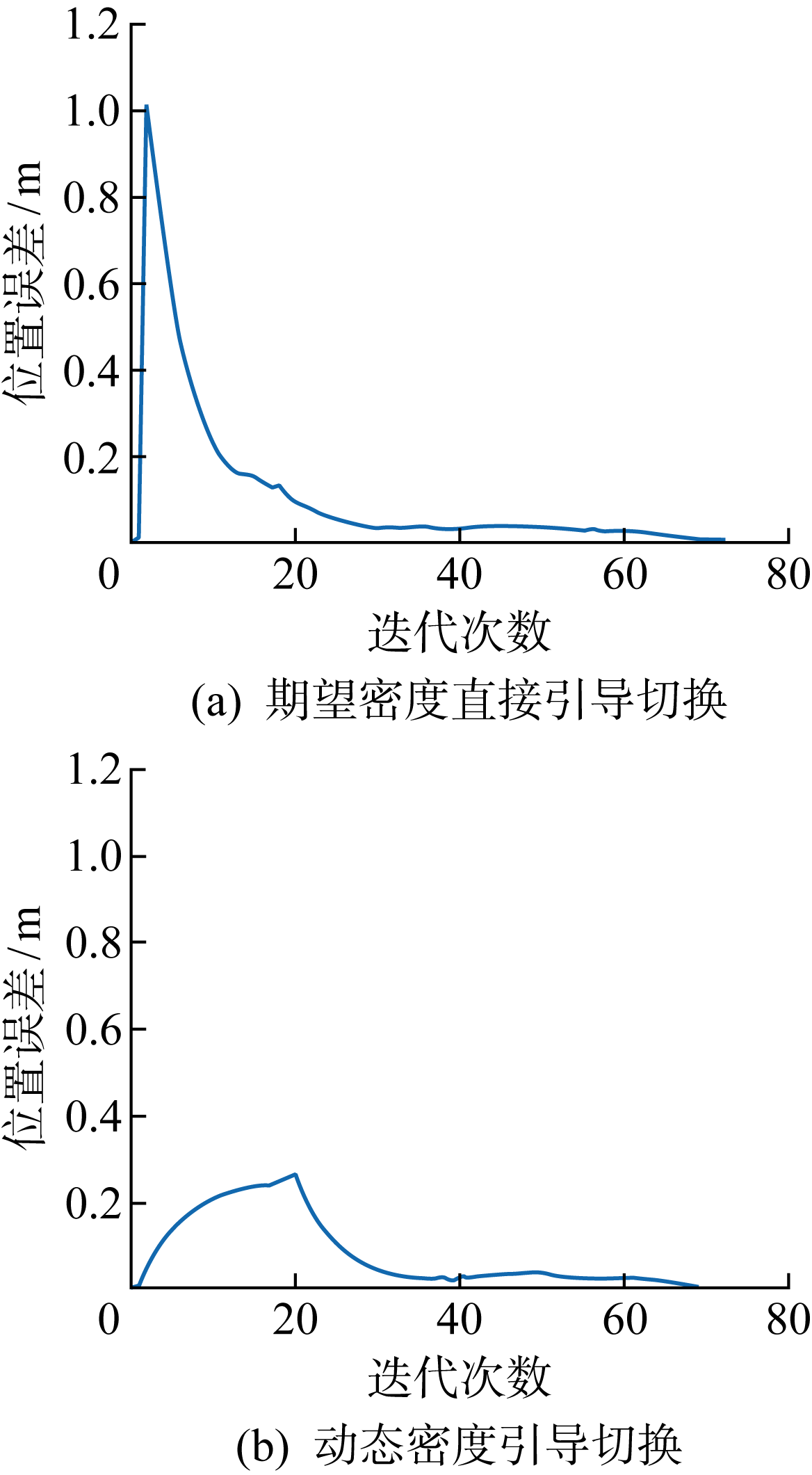
图11
期望密度直接引导编队分裂
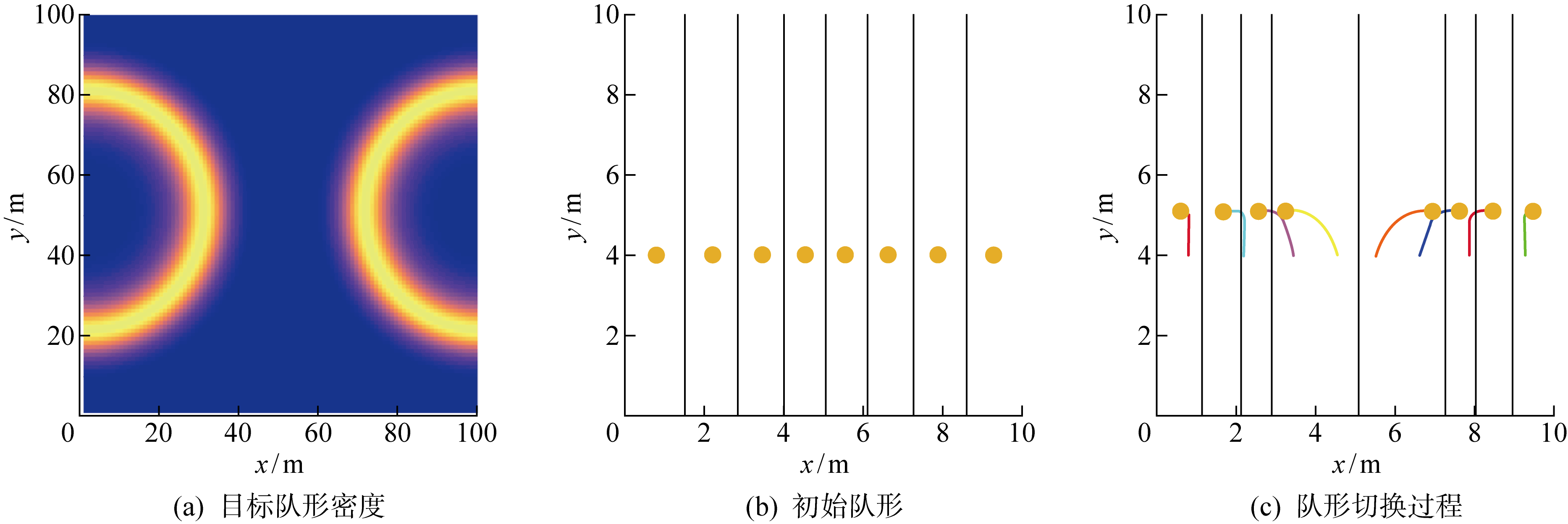
图12
直线形密度分布变期望密度分布动态过渡
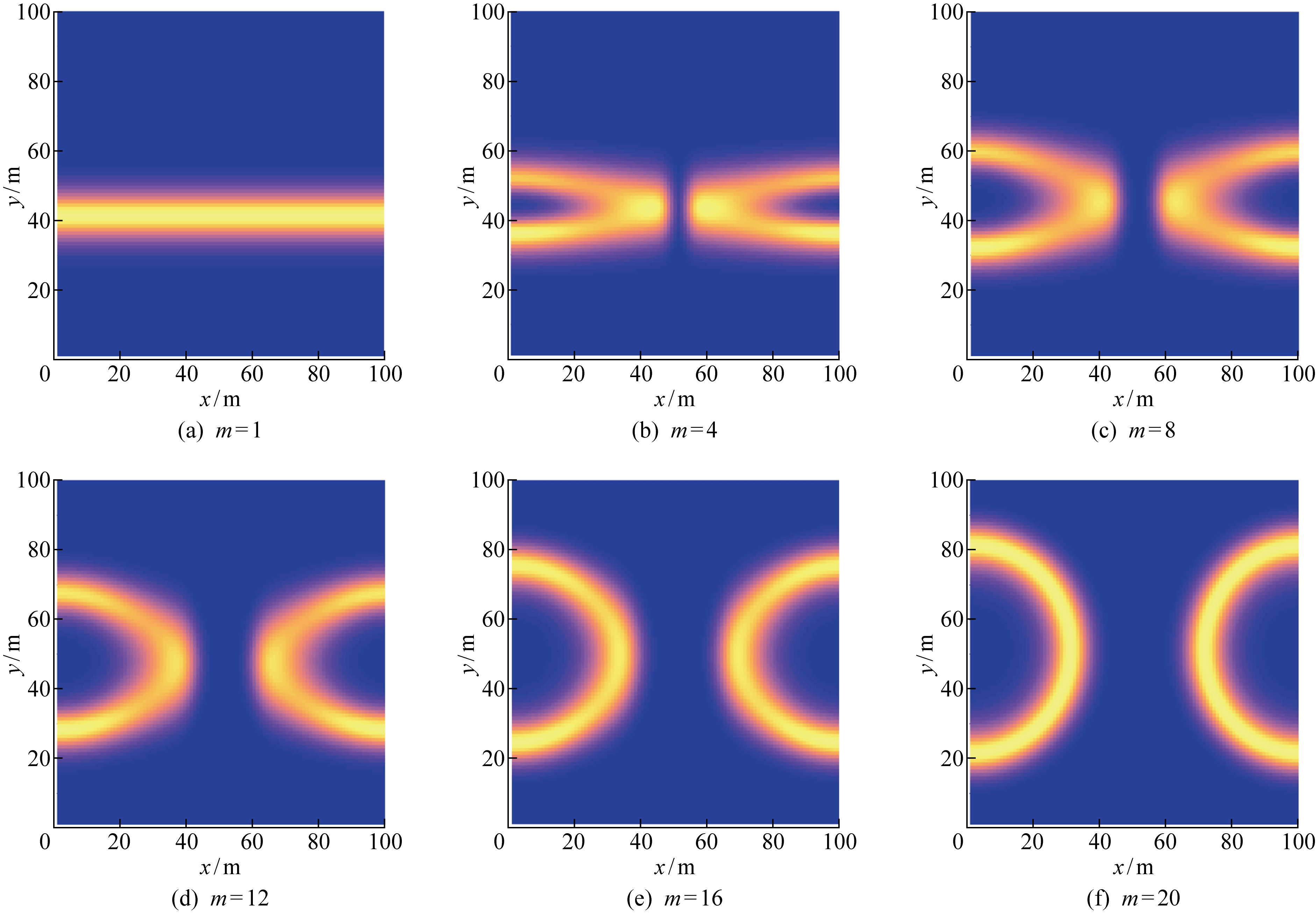
图13
动态密度引导编队分裂过程
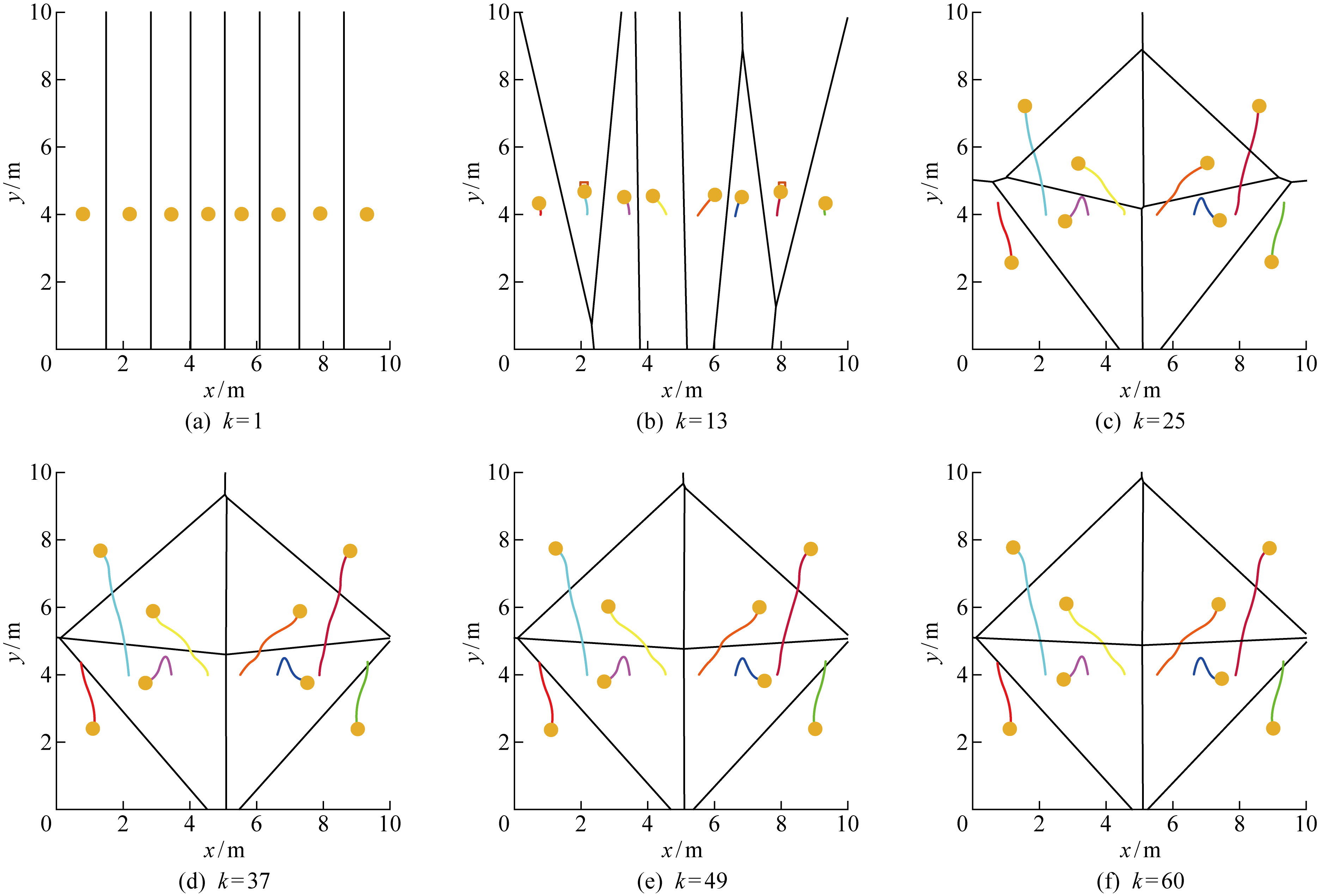
图14
环形密度函数直接引导编队合并
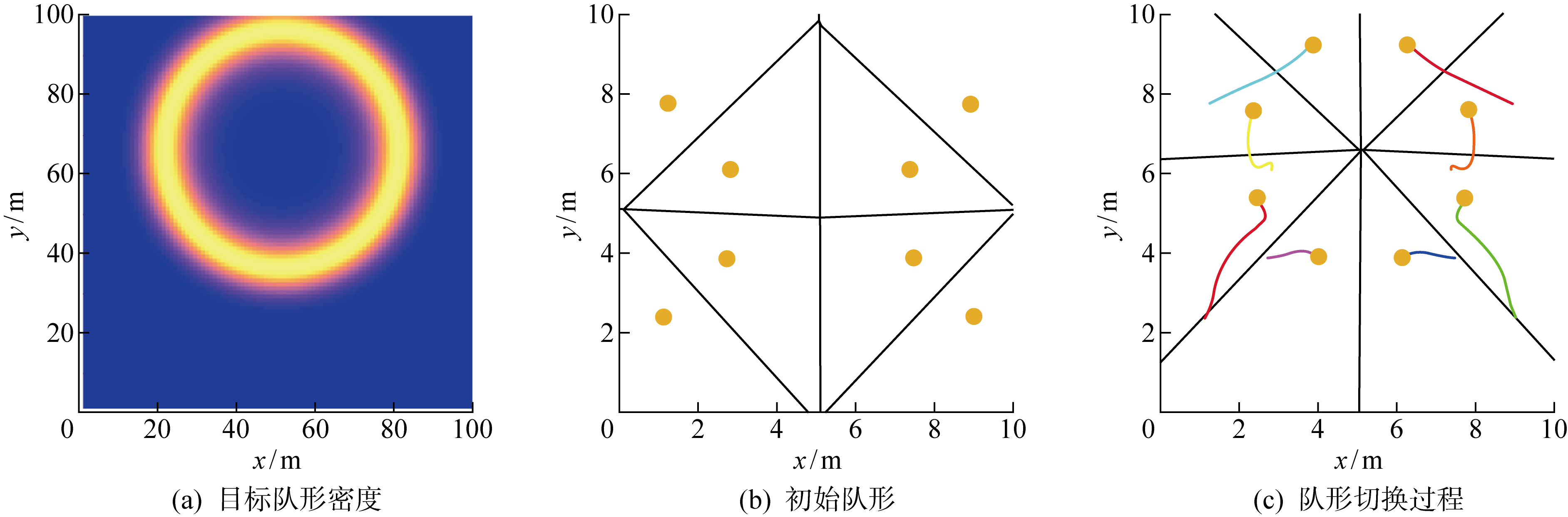
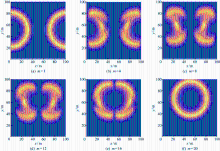
图15
初始队形密度分布变环形密度分布动态过渡

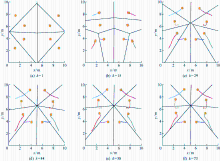
图16
动态密度引导编队合并过程
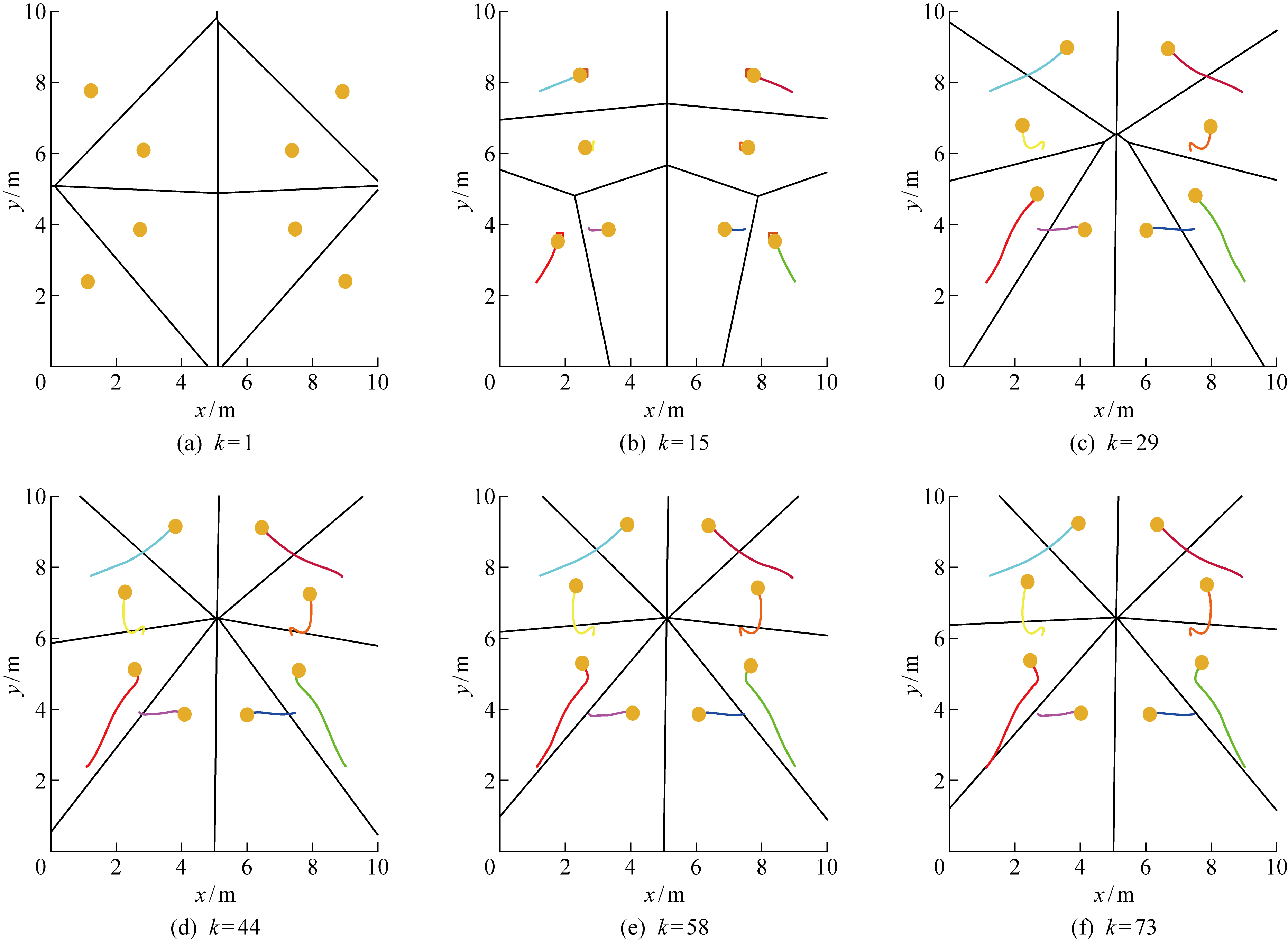
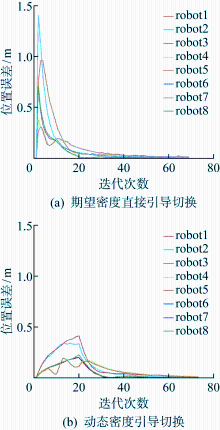
图17
仿真4编队合并过程机器人位置误差
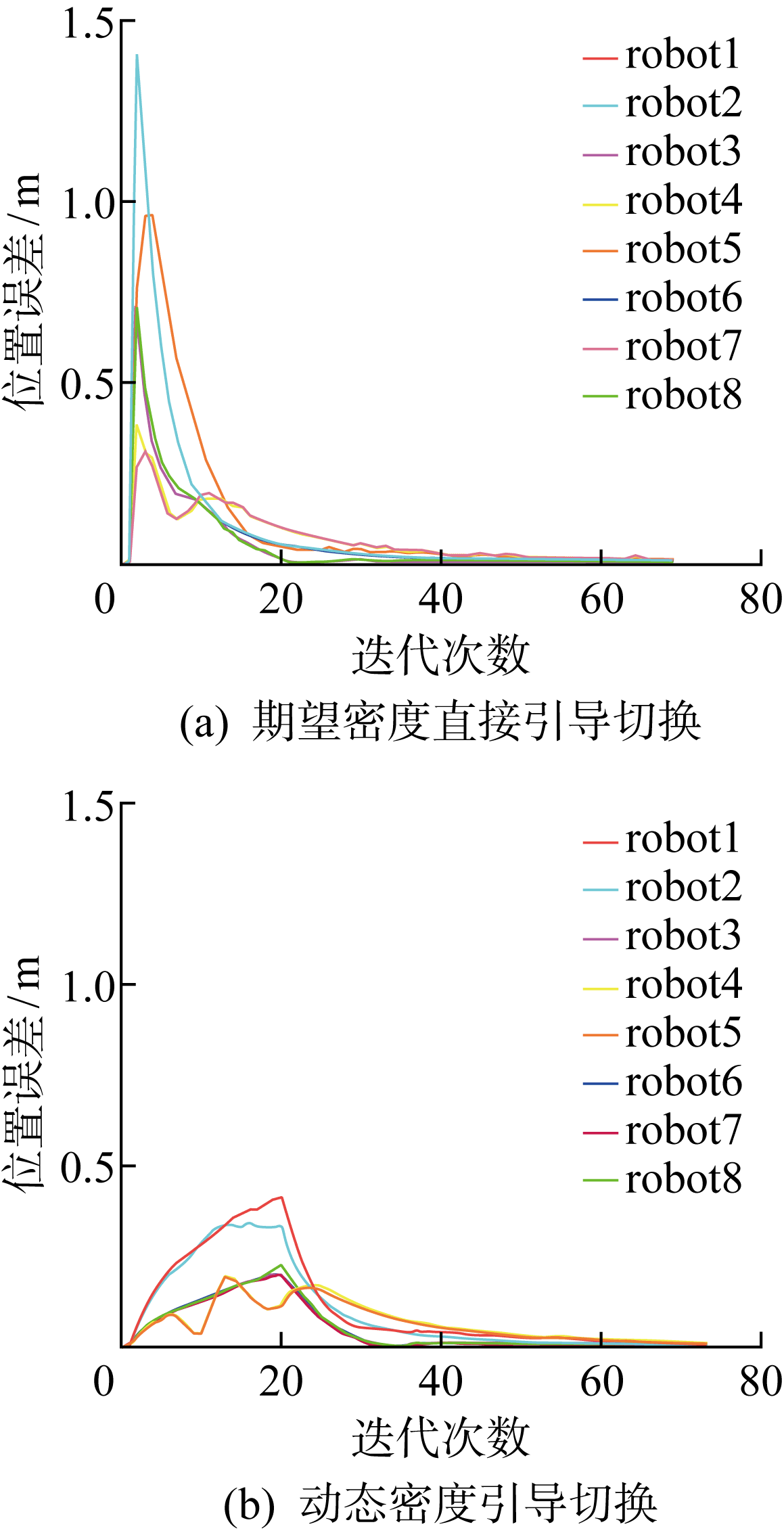
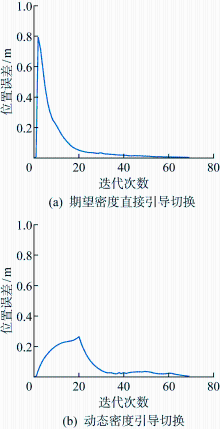
图18
仿真4编队合并过程机器人代价函数
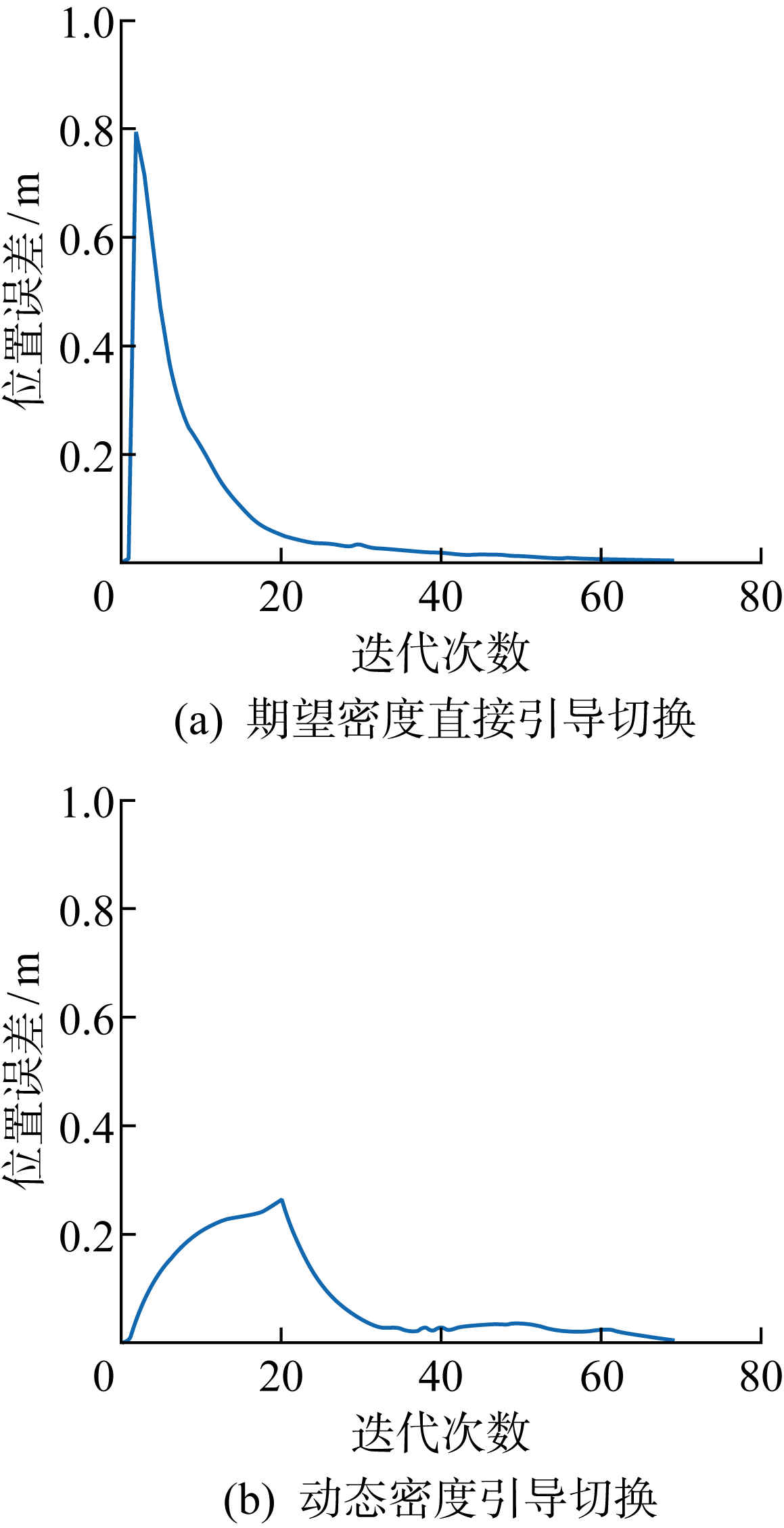
表2
编队切换过程平均位置误差与迭代次数
| 仿真 | 切换方式 | 编队平均位置误差 | 迭代次数 |
|---|---|---|---|
| 1 | 直接切换 | — | — |
| 本文方法 | 0.038 | 63 | |
| 2 | 直接切换 | 0.037 | 72 |
| 本文方法 | 0.035 | 69 | |
| 3 | 直接切换 | — | — |
| 本文方法 | 0.045 | 60 | |
| 4 | 直接切换 | 0.037 | 69 |
| 本文方法 | 0.035 | 73 |
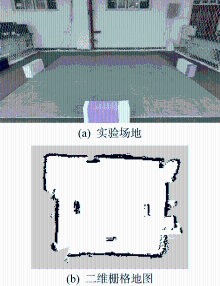
图19
实验环境
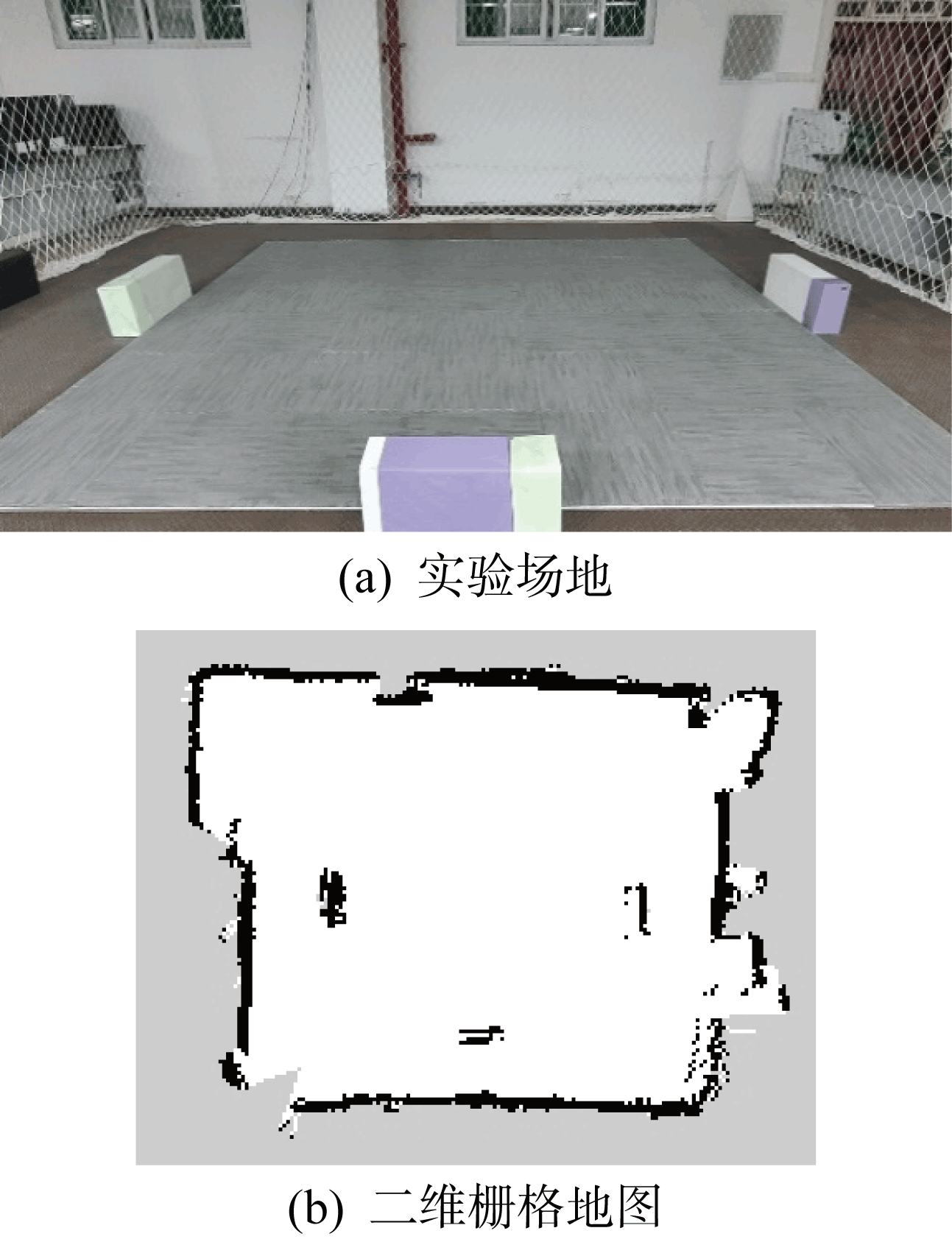
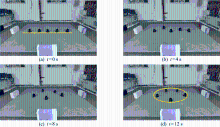
图20
直线形编队切换环形编队
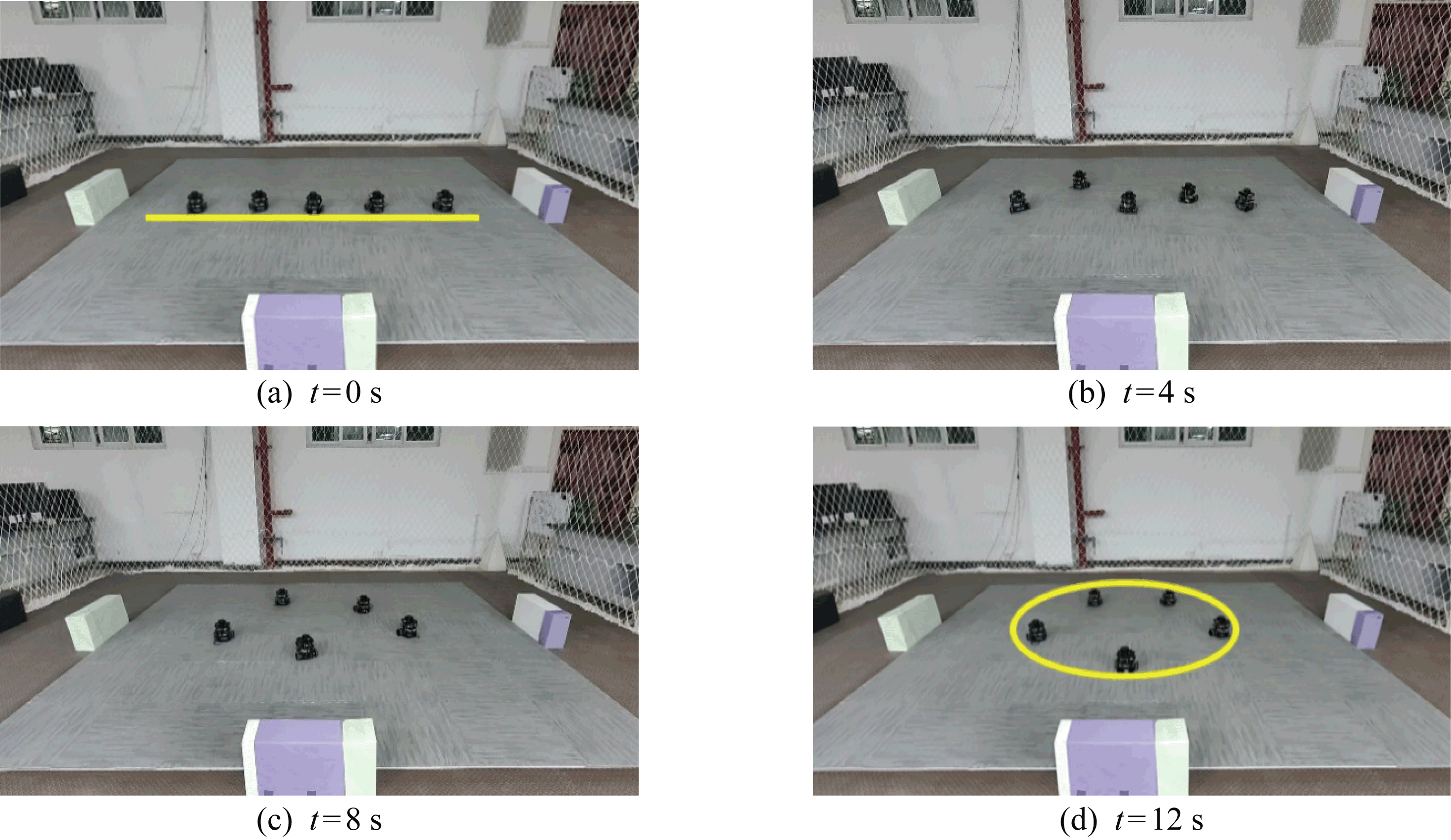
图21
环形编队切换直线形编队
| [1] | GUO S, LIU B, ZHANG S, et al. Continuous-time gaussian process trajectory generation for multi-robot formation via probabilistic inference[C]//International Conference on Intelligent Robots and Systems. Prague, Czech Republic: IEEE, 2021: 9247-9253. |
| [2] | 王树凤, 张钧鑫, 张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. |
| WANG Shufeng, ZHANG Junxin, ZHANG Junyou. Intelligent vehicles formation control based on artificial potential field and virtual leader[J]. Journal of Shanghai Jiao Tong University, 2020, 54(3): 305-311. | |
| [3] | HUANG J, ZHOU S, TU H, et al. Distributed optimization algorithm for multi-robot formation with virtual reference center[J]. Journal of Automatica Sinica, 2022, 9(4): 732-734. |
| [4] | FEOLA L, TRIANNI V. Adaptive strategies for team formation in minimalist robot swarms[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4079-4085. |
| [5] | REZECK P, CHAIMOWICZ L. Chemistry-inspired pattern formation with robotic swarms[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 9137-9144. |
| [6] | CORTES J, MARTINEZ S, KARATAS T, et al. Coverage control for mobile sensing networks[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 243-255. |
| [7] | BREITENMOSER A, SCHWAGER M, METZGER J C, et al. Voronoi coverage of non-convex environments with a group of networked robots[C]//2010 IEEE International Conference on Robotics and Automation. Anchorage, AK, USA: IEEE, 2010: 4982-4989. |
| [8] | KANTAROS Y, THANOU M, TZES A. Distributed coverage control for concave areas by a heterogeneous robot-swarm with visibility sensing constraints[J]. Automatica, 2015, 53: 195-207. |
| [9] | ZHENG L, ZHAO J, CHENG Y, et al. Geometry-constrained crowd formation animation[J]. Computers & Graphics, 2014, 38: 268-276. |
| [10] |
TERUEL E, ARAGUES R, LÓPEZ-NICOLÁS G. A distributed robot swarm control for dynamic region coverage[J]. Robotics and Autonomous Systems, 2019, 119: 51-63.
doi: 10.1016/j.robot.2019.06.002 |
| [11] | 郑利平, 程亚军, 周乘龙, 等. 异构群体队形光滑变换控制方法[J]. 计算机辅助设计与图形学学报, 2015, 27(10): 1963-1970. |
| ZHENG Liping, CHENG Yajun, ZHOU Chenglong, et al. Research on smooth formation control of heterogeneous crowds[J]. Journal of Computer-Aided Design & Computer Graphics, 2015, 27(10): 1963-1970. | |
| [12] | ZHENG X, ZONG C, CHENG J, et al. Visually smooth multi-UAV formation transformation[J]. Graphical Models, 2021, 116: 101111. |
| [13] | BAI Y, WANG Y, XIONG X, et al. Adaptive multi-agent control with dynamic obstacle avoidance in a limited region[C]//American Control Conference. Atlanta, USA: IEEE, 2022: 4695-4700. |
| [14] | XU X, DIAZ-MERCADO Y. Multi-robot control using coverage over time-varying domains[C]//International Symposium on Multi-Robot and Multi-Agent Systems. New Brunswick, USA: IEEE, 2019: 179-181. |
| [15] | XU X, DIAZ-MERCADO Y. Multi-robot control using coverage over time-varying non-convex domains[C]//IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020: 4536-4542. |
| [16] | GUO D, BAI Y, SVININ M, et al. Robust adaptive multi-agent coverage control for flood monitoring[C]//International Siberian Conference on Control and Communications. Kazan, Russia: IEEE, 2021: 1-5. |
| [17] | XU X, SHI G, TOKEKAR P, et al. Interactive multi-robot aerial cinematography through hemispherical manifold coverage[C]//International Conference on Intelligent Robots and Systems. Kyoto, Japan: IEEE, 2022: 11528-11534. |
| [18] | TERUEL E, ARAGUES R, LÓPEZ-NICOLÁS G. A practical method to cover evenly a dynamic region with a swarm[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1359-1366. |
| [19] | EISENBERGER M, NOVOTNY D, KERCHENBAUM G, et al. Neuromorph: Unsupervised shape interpolation and correspondence in one go[C]//Conference on Computer Vision and Pattern Recognition. Nashville, TN, USA: IEEE, 2021: 7473-7483. |
| [20] | PEYRÉ G, CUTURI M. Computational optimal transport: With applications to data science[J]. Foundations and Trends in Machine Learning, 2019, 11(5/6): 355-607. |
| [1] | . 多机协调吊运系统的绳索矢量碰撞检测算法研究[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 319-329. |
| [2] | 穆建彬,杨海丽,何德峰. 基于控制屏障函数的自主移动机器人安全编队分布式模型预测控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [3] | 焦聪, 许兆胜, 李威, 田道贵, 陈炼, 赵征. 针对分布式集群的空中诱骗对抗方法[J]. 空天防御, 2024, 7(4): 114-120. |
| [4] | 苗镇华1, 黄文焘2, 张依恋3, 范勤勤1. 基于深度强化学习的多模态多目标多机器人任务分配算法[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 377-387. |
| [5] | 王先至, 李国飞, 常亚南. 基于分布式扩张状态观测器的多飞行器编队控制[J]. 上海交通大学学报, 2024, 58(11): 1798-1804. |
| [6] | 刘禹铭, 赵勇, 董正建, 王平, 姬煜琦. 基于反步法的多移载工装协同作业编队控制策略[J]. 上海交通大学学报, 2023, 57(1): 103-115. |
| [7] | 刘晨, 谢宝娣, 董国宝, 霍达, 段雨昕, 夏川. 基于自适应积分滑模的无人机编队控制器设计[J]. 空天防御, 2021, 4(1): 65-70. |
| [8] | 王树凤,张钧鑫,张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. |
| [9] | 苏程,叶佳楠,李巍,丁旺才,赵志刚. 欠约束多机协调吊运系统动力学工作空间分析[J]. 上海交通大学学报(自然版), 2019, 53(2): 225-231. |
| [10] | 赵志刚1,滕富军1,石广田1,李劲松2,季钢2. 多机器人联合吊运系统可行域分析与求解[J]. 上海交通大学学报(自然版), 2015, 49(08): 1174-1180. |
| [11] | 费燕琼a, b, 朱越梁a, b, 宋立博a, b. 多模块式移动机器人系统的自组织协作行为[J]. 上海交通大学学报(自然版), 2011, 45(07): 990-994. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||