上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (11): 1698-1706.doi: 10.16183/j.cnki.jsjtu.2022.455
王向磊1,2, 刘秀全1,2( ), 刘兆伟1,2, 畅元江1,2, 陈国明1,2
), 刘兆伟1,2, 畅元江1,2, 陈国明1,2
收稿日期:2022-11-09
修回日期:2023-05-12
接受日期:2023-05-16
出版日期:2024-11-28
发布日期:2024-12-02
通讯作者:
刘秀全,副教授,博士生导师,电话(Tel.):0532-86983300;E-mail:作者简介:王向磊(1994—),博士生,从事海洋油气管柱动力学研究.
基金资助:
WANG Xianglei1,2, LIU Xiuquan1,2(), LIU Zhaowei1,2, CHANG Yuanjiang1,2, CHEN Guoming1,2
Received:2022-11-09
Revised:2023-05-12
Accepted:2023-05-16
Online:2024-11-28
Published:2024-12-02
摘要:
深海钻井立管系统紧急解脱后的反冲控制是深海油气钻探中的必备技术,但系统动力参数在多方面具有不确定性与难测性,给实际反冲控制带来了严峻挑战.建立系统模型不确定条件下的立管反冲智能自适应控制方法,通过反冲控制名义状态空间方程与闭环系统稳定性推导考虑模型不确定的修正控制输入,采用径向基(RBF)神经网络逼近模型不确定部分并选取满足李雅普诺夫(Lyapunov)稳定的权值自适应律,实现控制输入中对不确定部分的动态补偿.结果表明:该方法适用于实际反冲控制阀有调控速度限制的情况;张紧器刚度、阻尼、钻井液下泄摩擦力及立管浮力载荷等不确定性对反冲动力响应及控制效果均有一定影响;无论系统参数是否精确,经过RBF自适应控制后都降低了反冲初期振荡高度且降低了反冲触底风险.研究成果可有效解决工程背景下缺乏准确系统参数的立管反冲控制难题.
中图分类号:
王向磊, 刘秀全, 刘兆伟, 畅元江, 陈国明. 系统不确定的深海钻井立管解脱反冲智能控制[J]. 上海交通大学学报, 2024, 58(11): 1698-1706.
WANG Xianglei, LIU Xiuquan, LIU Zhaowei, CHANG Yuanjiang, CHEN Guoming. Intelligent Control for Deepwater Drilling Riser Disconnection and Recoil Considering System Uncertainty[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1698-1706.
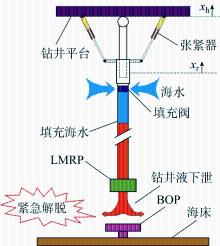
图1
立管紧急脱离及反冲示意图
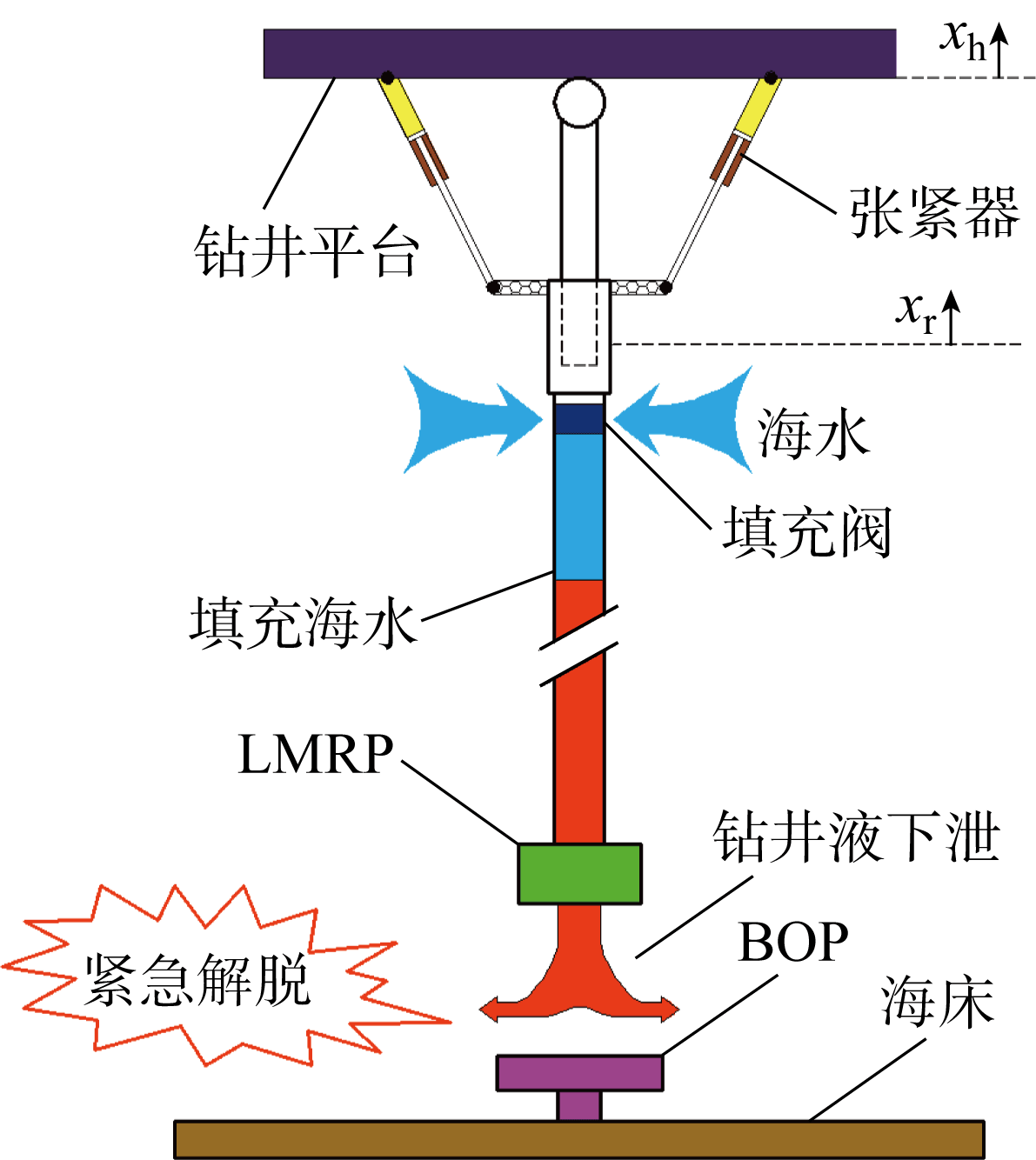
图2
张紧器原理图
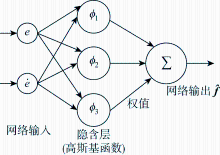
图3
RBF神经网络结构
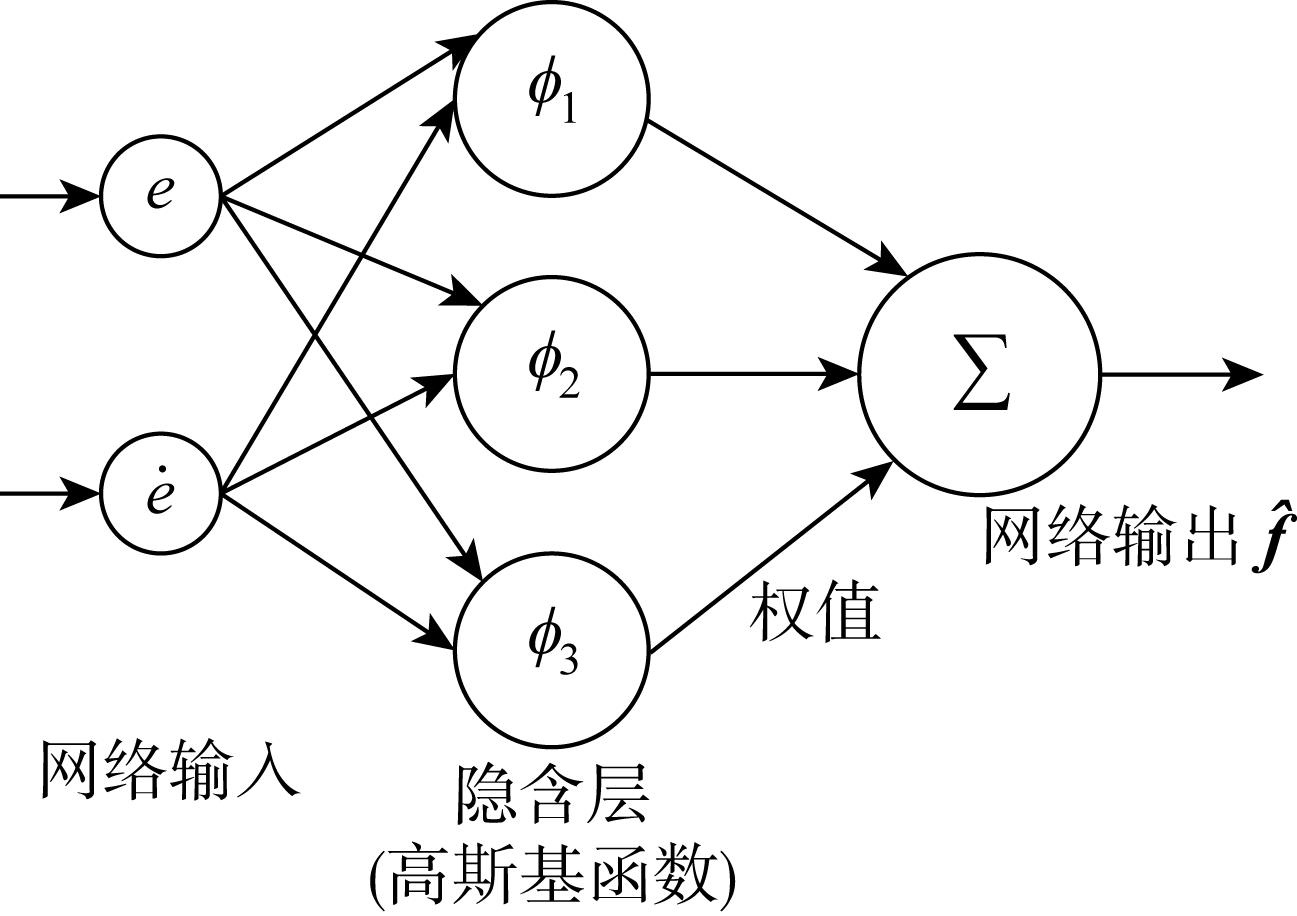
表1
立管系统参数
| 参数 | 伸缩节 | 立管浮力单根 | LMRP |
|---|---|---|---|
| 数量 | 1 | 42 | 1 |
| 单根长度/m | 24.384 | 22.86 | 5.01 |
| 强度外径/m | 0.660 4 | 0.533 4 | — |
| 水动力外径/m | 0.660 4 | 1.371 6 | 0.914 4 |
| 壁厚/mm | — | 25.4 | — |
| 湿质量/kg | 25 974 | 2 165 | 120 000 |
| 干质量/kg | 28 082 | 23 366 | 129 496 |
表2
张紧器及其他计算参数
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| Ph,0/MPa | 3.05 | Pl,0/MPa | 150 |
| Ar/m2 | 0.204 8 | Ap/m2 | 0.246 3 |
| Vh,0/m3 | 4.28 | Vl,0/m3 | 2.25 |
| ρm/(kg·m-3) | 1 537 | Ct0/(kN·s·m-1) | 259 |
| ζ | 0.1 | ρw/(kg·m-3) | 1 025 |
| Cw | 0.015 | A/m2 | 0.011 3 |
| n | 1.4 | ρo/(kg·m-3) | 1 140 |
| fw | 0.002 | fm | 0.004 |
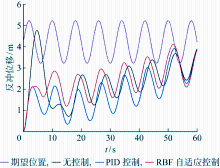
图4
规则升沉作用的反冲及控制响应
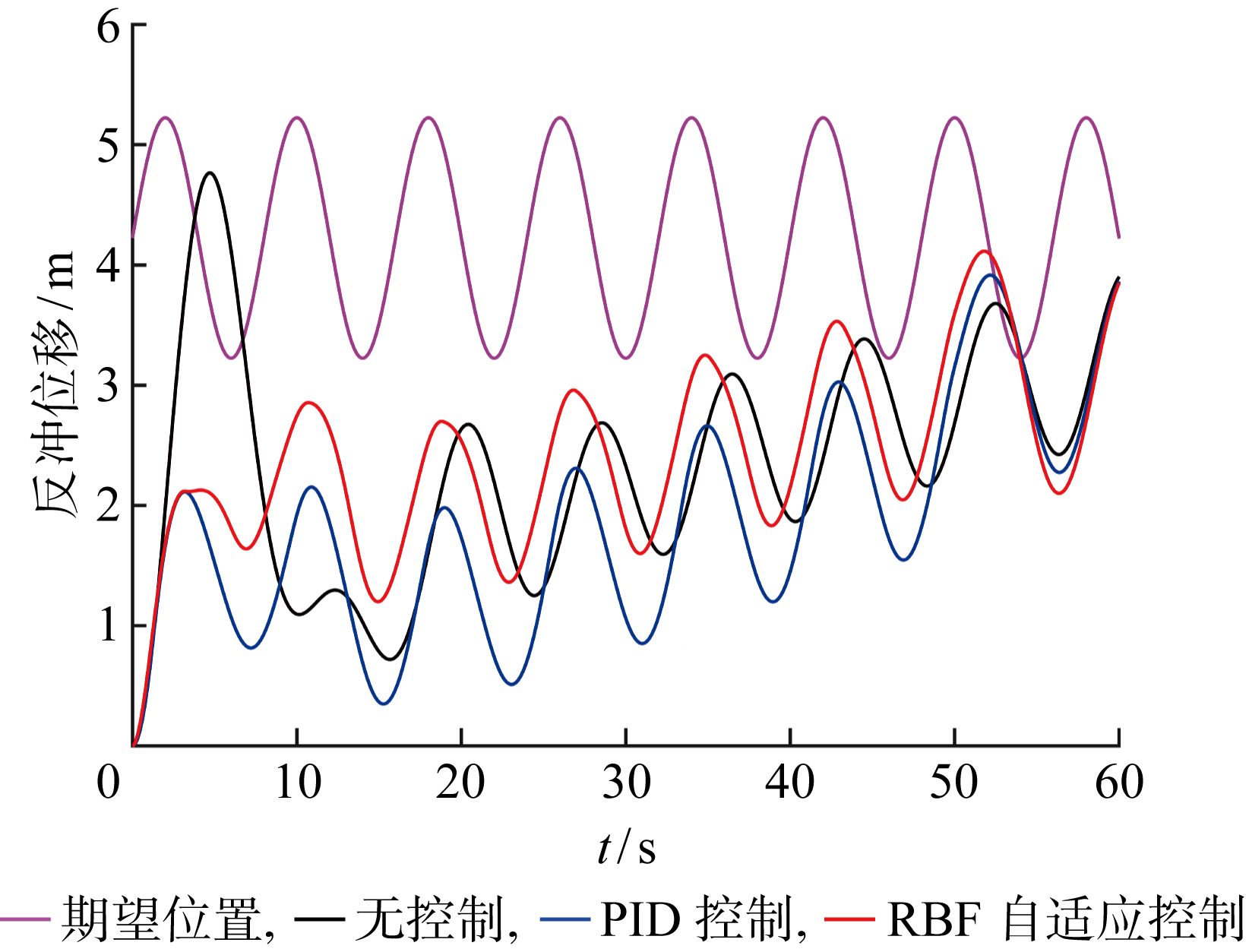
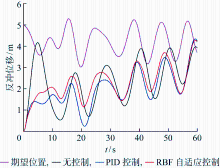
图5
不规则升沉作用的反冲及控制响应
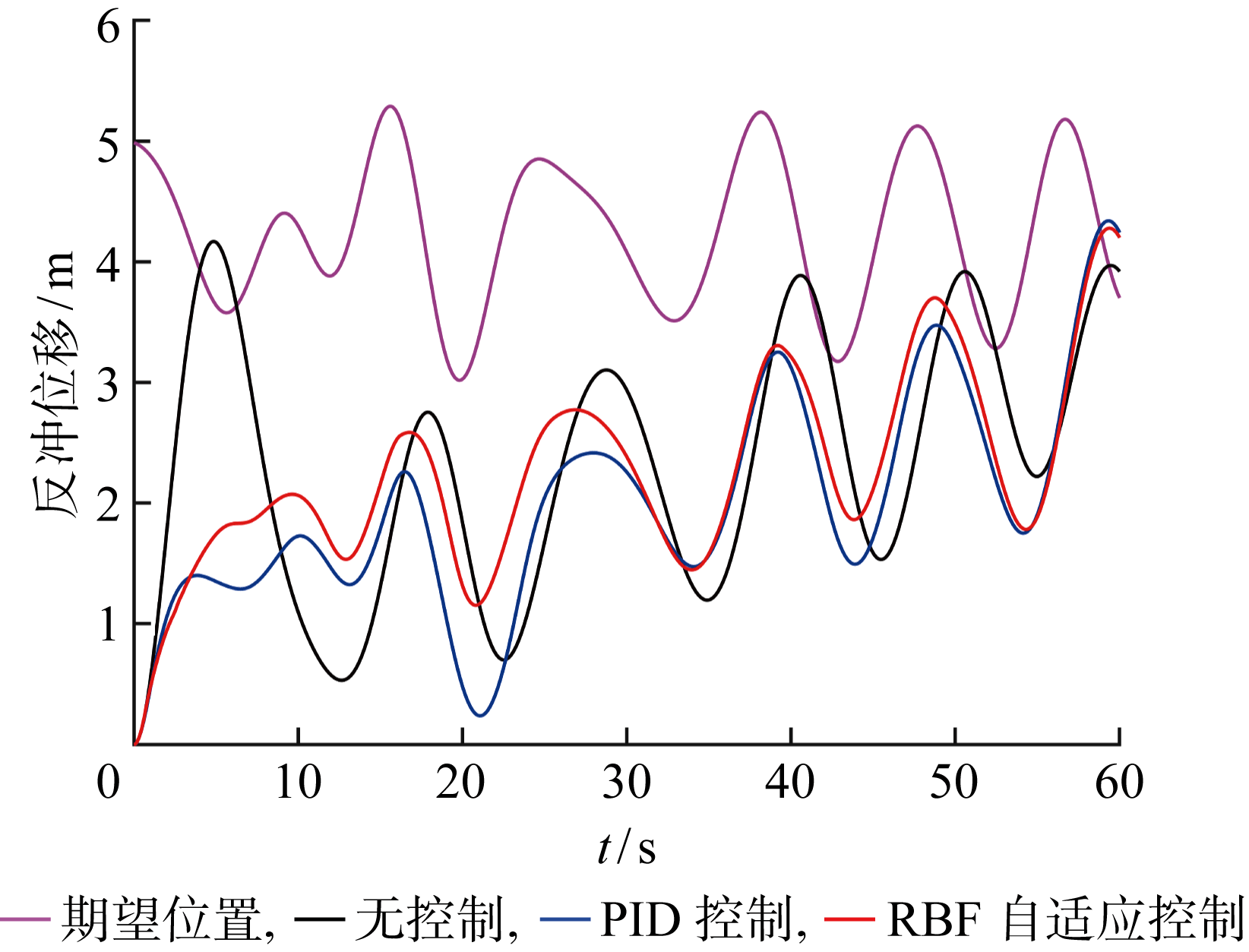
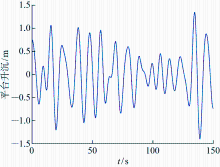
图6
随机升沉时程曲线
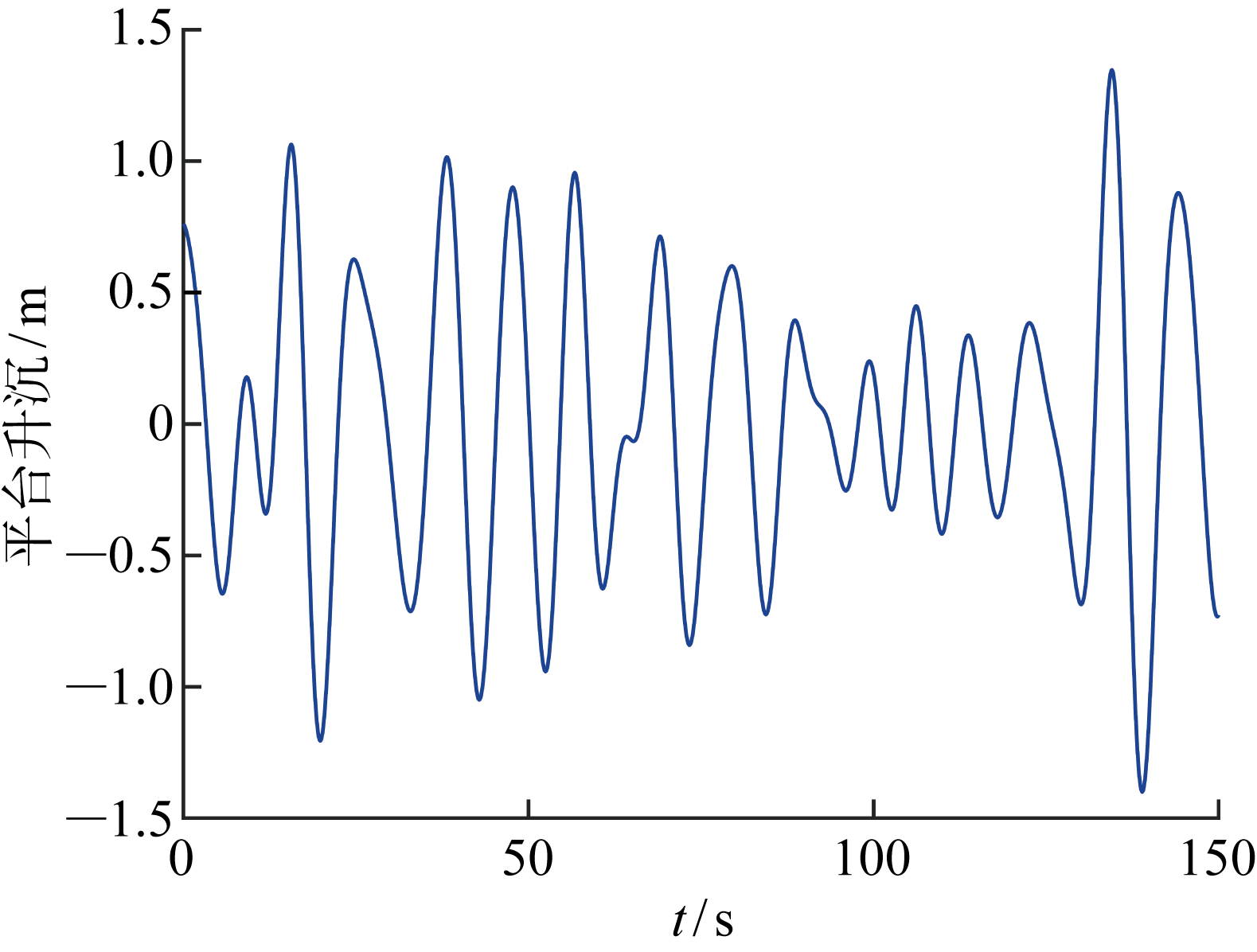
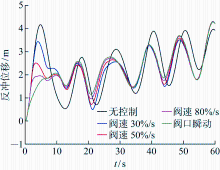
图7
阀口作动速率对反冲及控制的影响
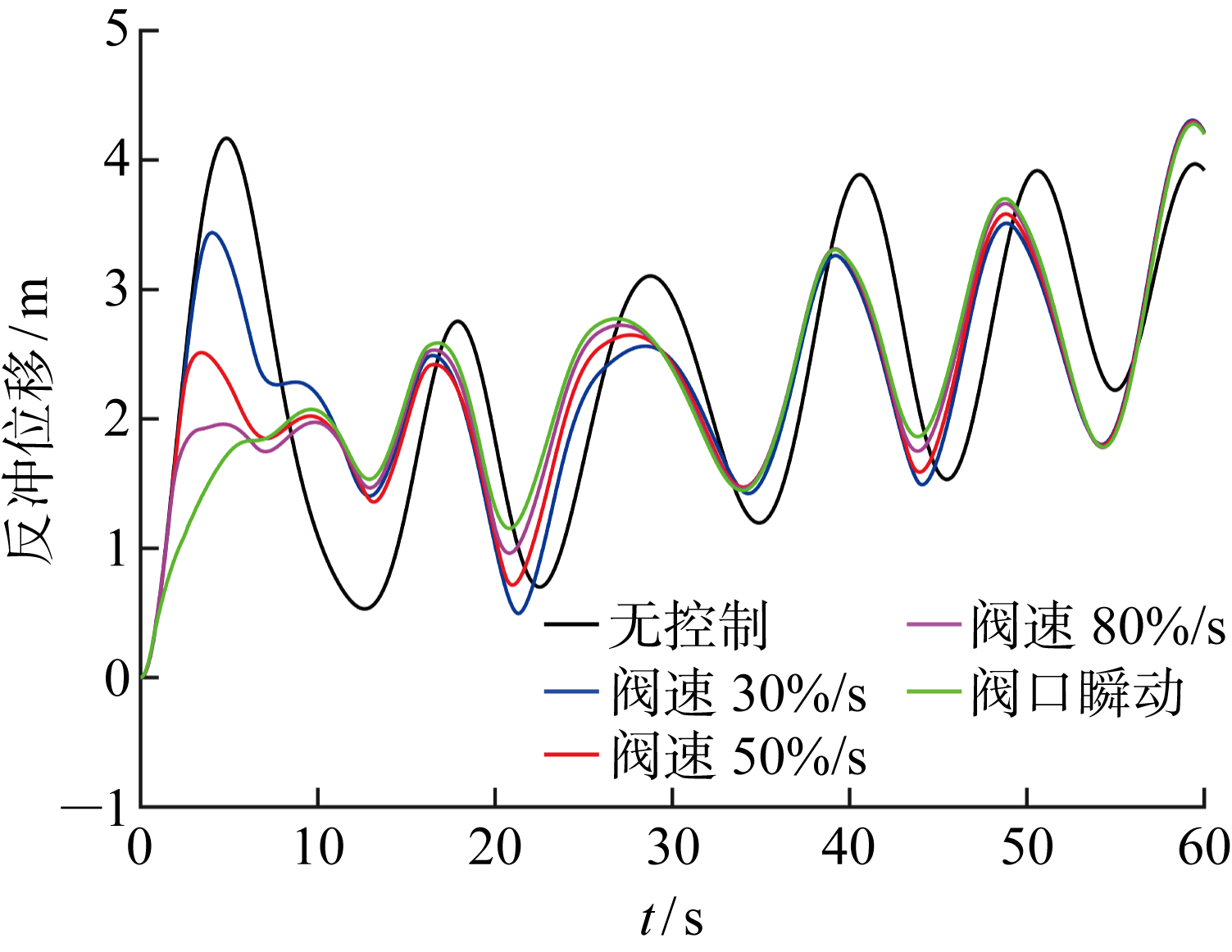
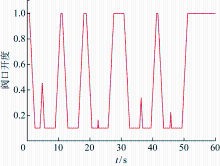
图8
50%/s调控速率的控制阀作动曲线
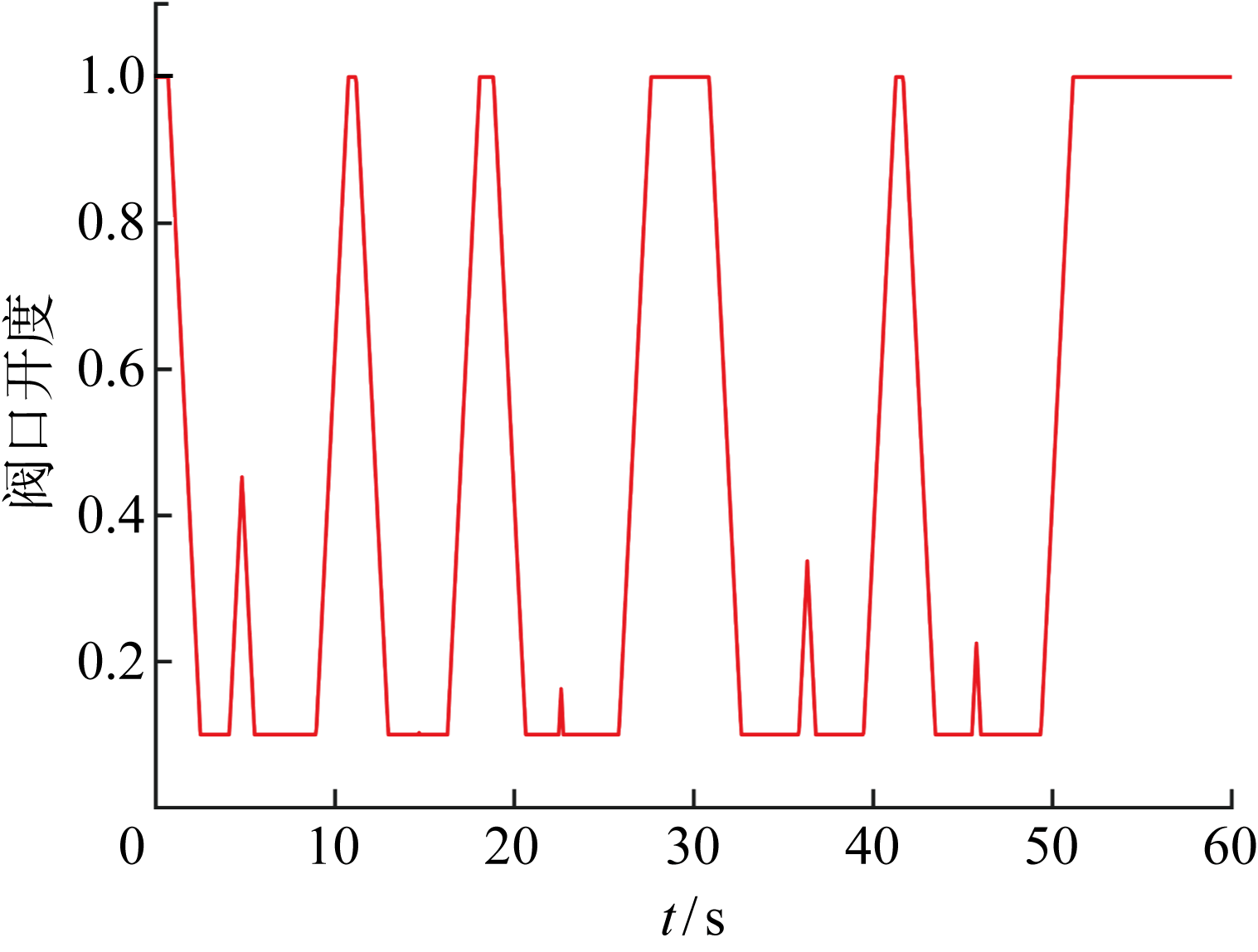
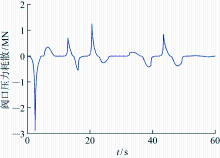
图9
50%/s调控速率的控制阀压力损耗
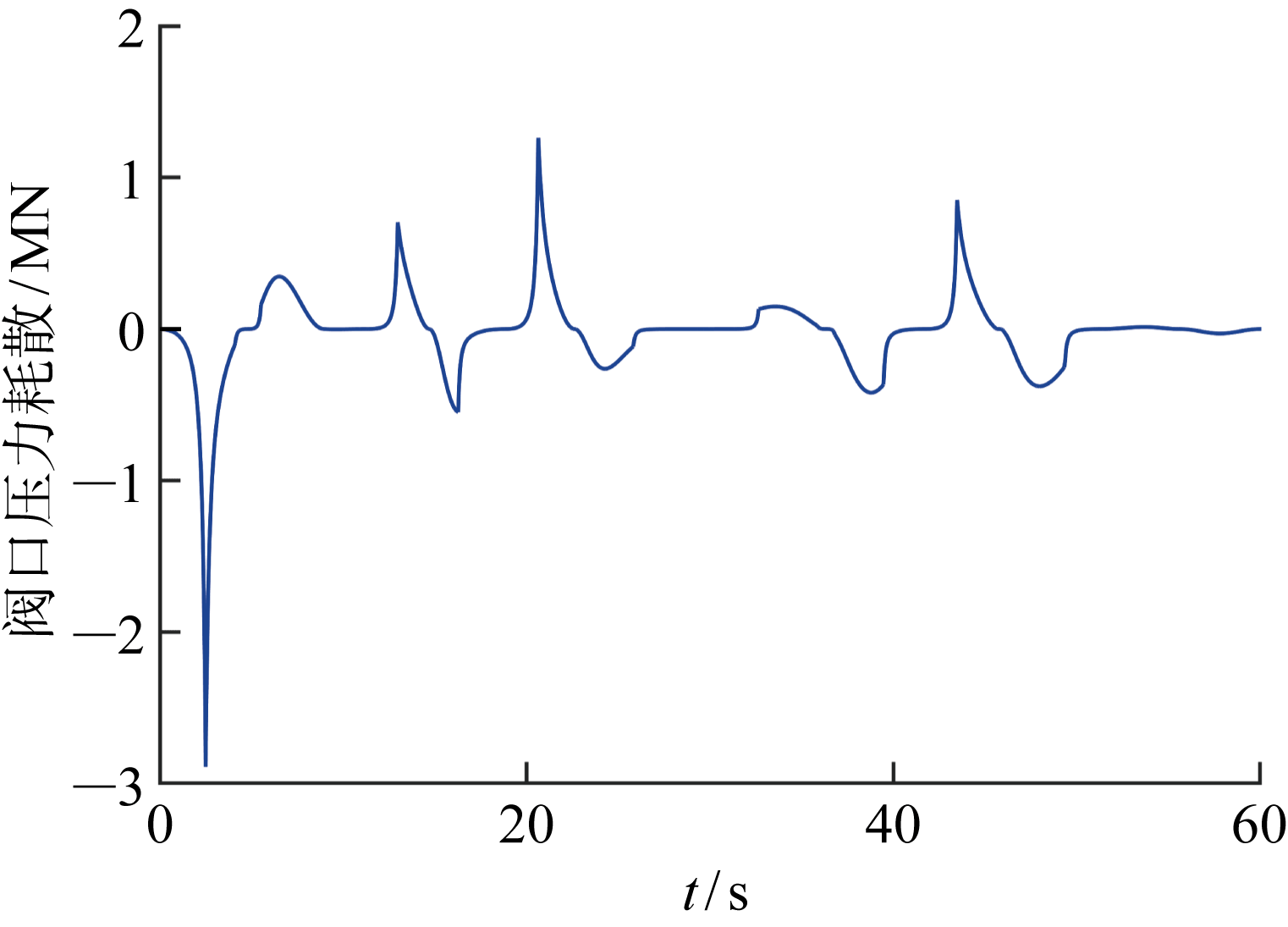
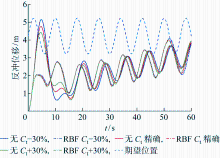
图10
张紧器阻尼不确定对反冲及控制的影响
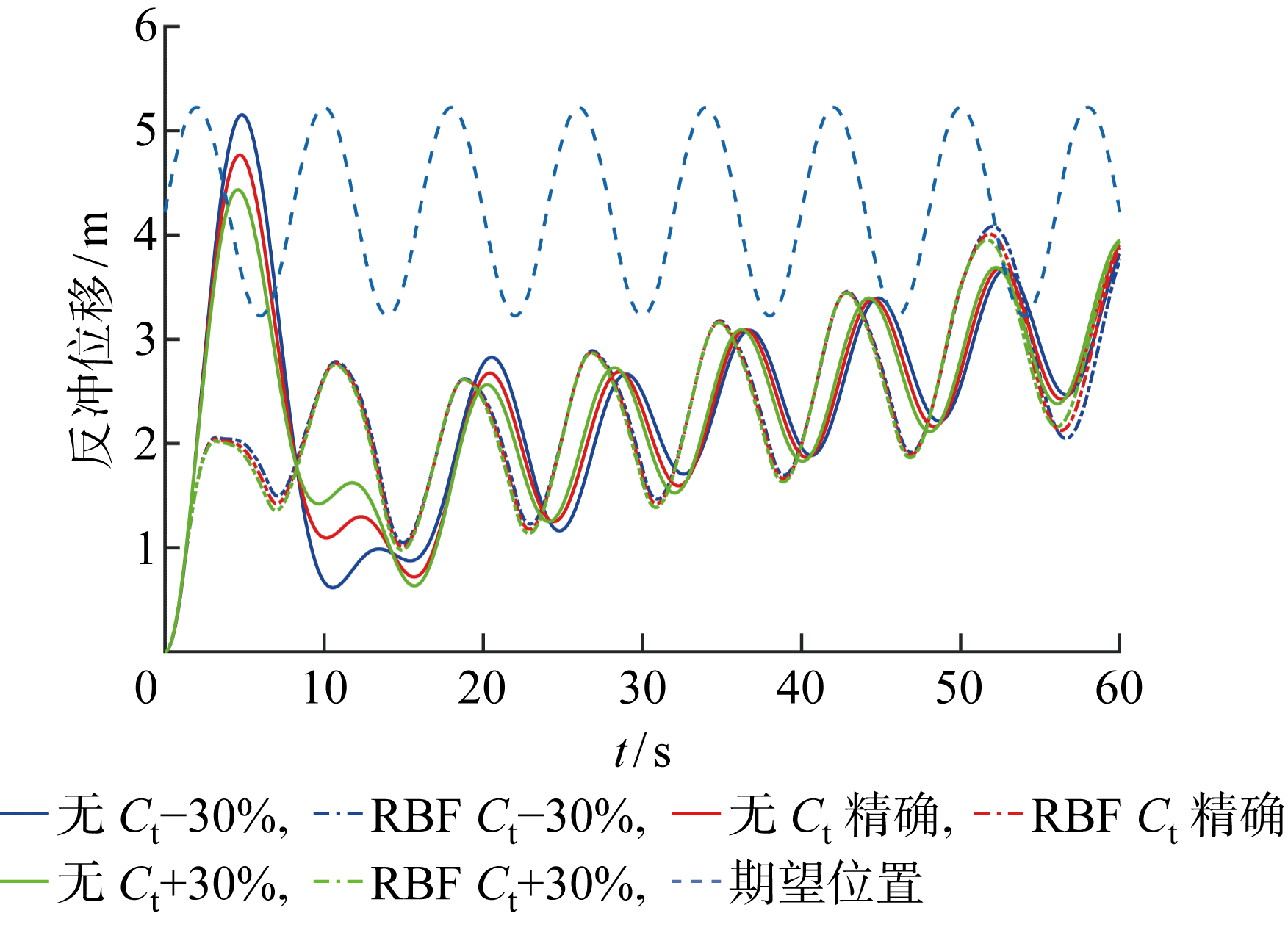
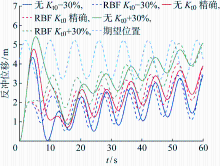
图11
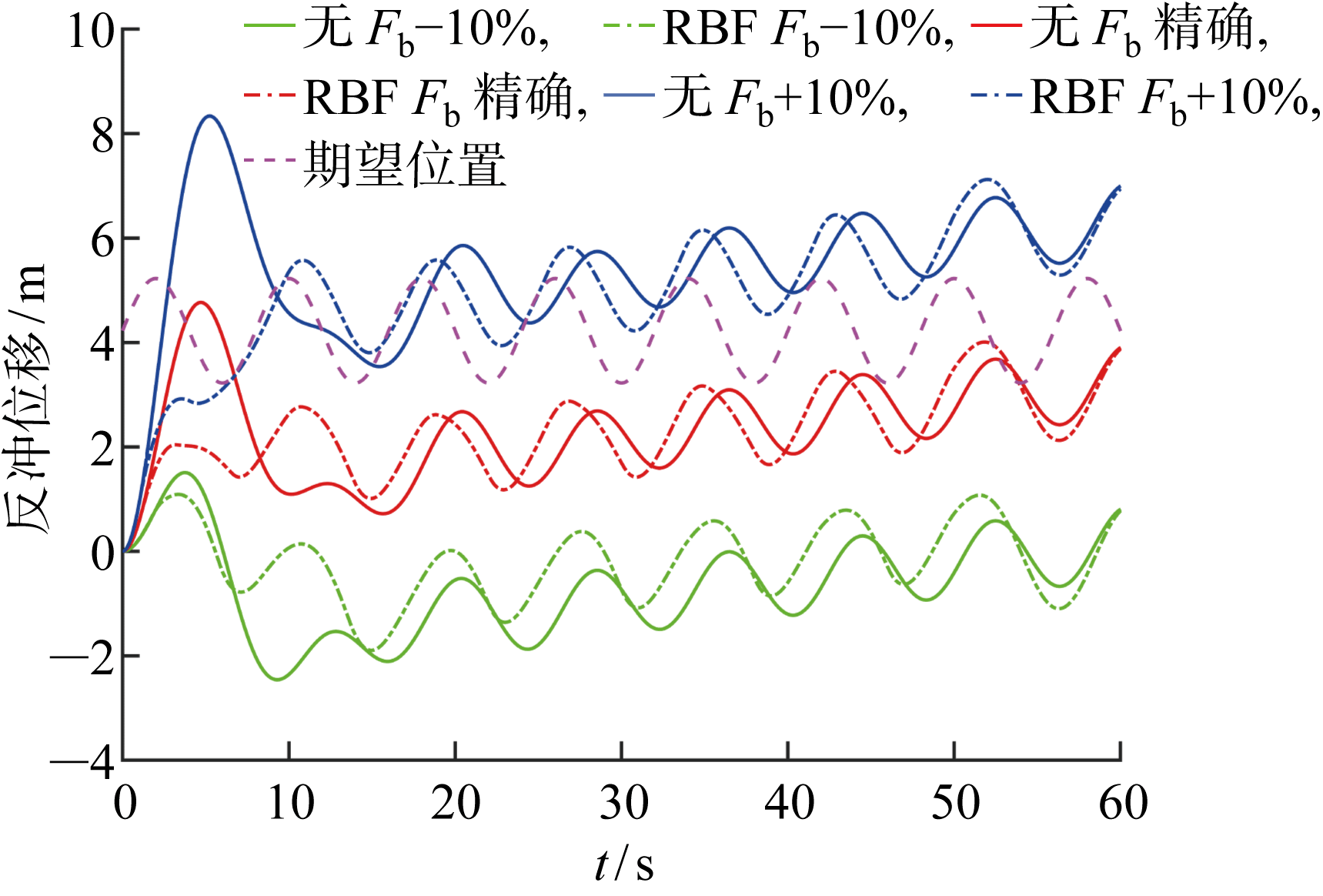
张紧器刚度不确定时的反冲及控制响应
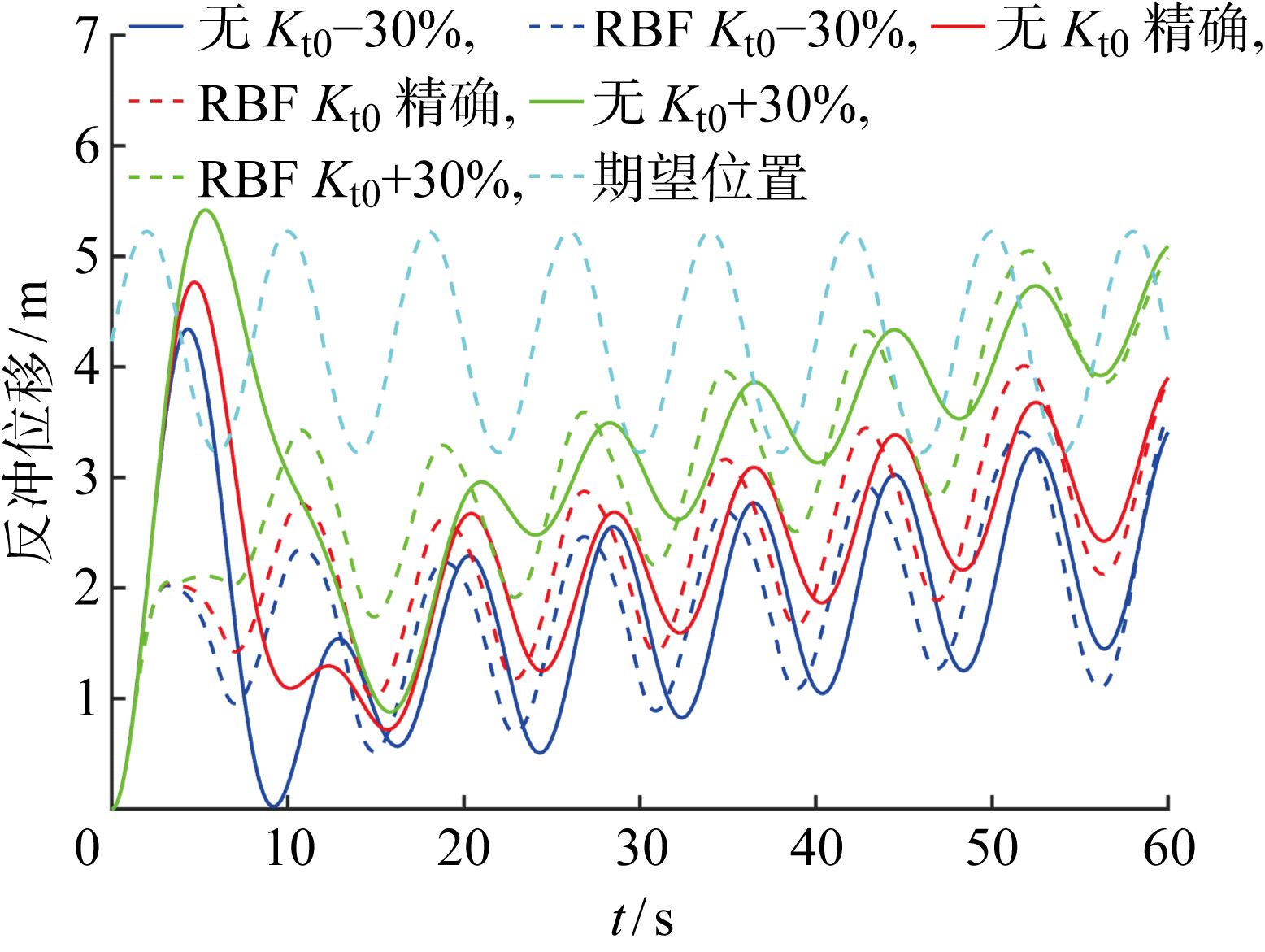
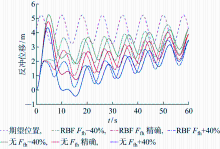
图12
水动力载荷不确定对反冲及控制的影响
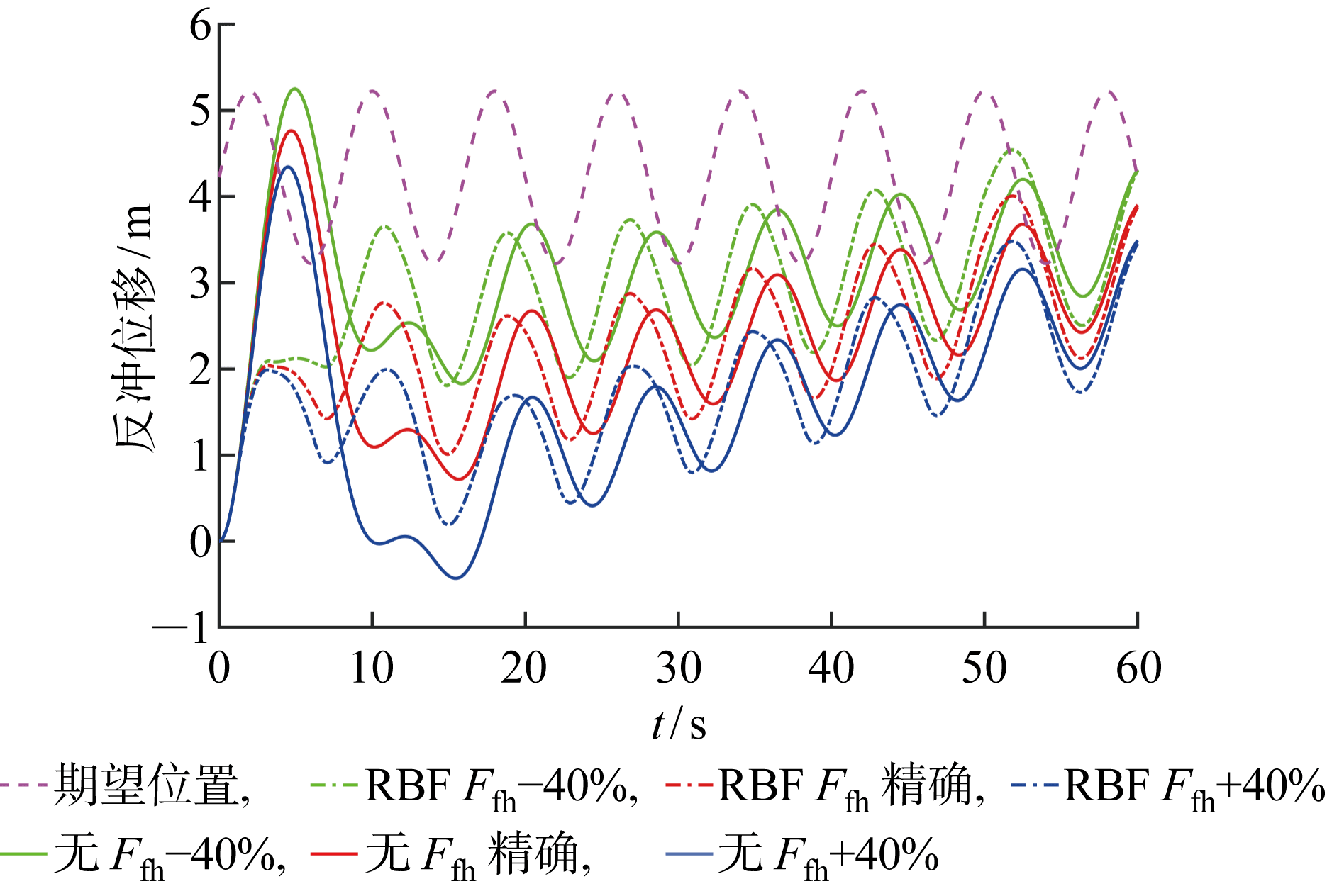
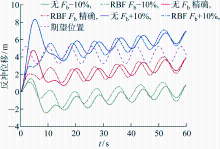
图13
浮力不确定时的反冲及控制响应
| [1] | NIE Z Y, CHANG Y J, LIU X Q, et al. A DBN-GO approach for success probability prediction of drilling riser emergency disconnect in deepwater[J]. Ocean Engineering, 2019, 180: 49-59. |
| [2] | CHANG Y J, CHEN G M, WU X F, et al. Failure probability analysis for emergency disconnect of deepwater drilling riser using Bayesian network[J]. Journal of Loss Prevention in the Process Industries, 2018, 51: 42-53. |
| [3] | 王坤鹏, 薛鸿祥, 唐文勇. 全耦合深海平台系统中液压张紧器的数值模拟[J]. 上海交通大学学报, 2012, 46(10): 1652-1657. |
| WANG Kunpeng, XUE Hongxiang, TANG Wen-yong. Numerical simulation of hydraulic tensioner in fully coupled deep-sea platform system[J]. Journal of Shanghai Jiao Tong University, 2012, 46(10): 1652-1657. | |
| [4] | 齐娟娟. 悬挂状态下钻井隔水管的结构动力学及涡激振动研究[D]. 上海: 上海交通大学, 2015. |
| QI Juanjuan. A Study on structure dynamics and vortex shedding vibration of drilling risers under hang off mode[D]. Shanghai: Shanghai Jiao Tong University, 2015. | |
| [5] | MENG S, CHE C D, ZHANG W J. Discharging flow effect on the recoil response of a deep-water drilling riser after an emergency disconnect[J]. Ocean Engineering, 2018, 151: 199-205. |
| [6] | MENG S, CHEN Y, CHE C D. Coupling effects of a deep-water drilling riser and the platform and the discharging fluid column in an emergency disconnect scenario[J]. China Ocean Engineering, 2020, 34(1): 21-29. |
| [7] | WANG Y B, GAO D L. Influence of the damping matrix and mud discharge on the recoil response of deepwater drilling riser after emergency disconnection[J]. Ocean Engineering, 2021, 222: 108591. |
| [8] | WANG X L, LIU X Q, LIU Z W, et al. Dynamic recoil response of tensioner and riser coupled in an emergency disconnection scenario[J]. Ocean Engineering, 2022, 247: 110730. |
| [9] | 田秀娟. 深水钻井隔水管张紧系统反冲控制研究[D]. 青岛: 中国石油大学(华东), 2013. |
| TIAN Xiujuan. Study on recoil control of riser tensioning system in deepwater drilling[D]. Qingdao: China University of Petroleum, 2013. | |
| [10] | 何新霞, 张方芬, 田秀娟, 等. 深水钻井隔水管反冲控制系统建模与仿真[J]. 石油机械, 2016, 44(3): 63-67. |
| HE Xinxia, ZHANG Fangfen, TIAN Xiujuan, et al. Modeling and simulation for recoil control system of deepwater drilling riser[J]. China Petroleum Machinery, 2016, 44(3): 63-67. | |
| [11] | LIU X Q, LIU Z W, WANG X L, et al. Recoil control of deepwater drilling riser system based on optimal control theory[J]. Ocean Engineering, 2021, 220: 108473. |
| [12] | LIU X Q, LIU Z W, WANG X L, et al. An intelligent recoil controller for riser system based on fuzzy control theory[J]. International Journal of Naval Architecture and Ocean Engineering, 2022, 14: 100439. |
| [13] | 李欢, 李鹏, 范松, 等. 基于AMESim的隔水管张紧器抗反冲控制研究[J]. 石油机械, 2019, 47(9): 84-89. |
| LI Huan, LI Peng, FAN Song, et al. AMESim-based research on anti-recoil control of riser tensioner[J]. China Petroleum Machinery, 2019, 47(9): 84-89. | |
| [14] | SUN Y T, ZHAO Y D, ZHANG B L, et al. Recoil control of deepwater-drilling riser with optimal guaranteed cost H∞ control[J]. Applied Sciences, 2022, 12(8): 3945. |
| [15] | ZHAO Y D, SUN Y T, ZHANG B L, et al. Recoil control of deepwater drilling riser systems via optimal control with feedforward mechanisms[J]. Ocean Engineering, 2022, 257: 111690. |
| [16] | American Petroleum Institute. Design, selection, operation, and maintenance of marine drilling riser systems: API RP 16Q[S]. Washington, USA: API, 2017. |
| [17] | WANG X L, LIU X Q, ZHANG N, et al. Improved recoil dynamic analysis of the deepwater riser system after emergency disconnection[J]. Applied Ocean Research, 2021, 113: 102719. |
| [18] | LI C W, FAN H H, WANG Z M, et al. Two methods for simulating mud discharge after emergency disconnection of a drilling riser[J]. Journal of Natural Gas Science and Engineering, 2016, 28: 142-152. |
| [19] | WANG X L, LIU X Q, ZHANG S Y, et al. Study on mud discharge after emergency disconnection of deepwater drilling risers[J]. Journal of Petroleum Science and Engineering, 2020, 190: 107105. |
| [20] | YANG Y, HUANG D Q, DONG X C. Enhanced neural network control of lower limb rehabilitation exoskeleton by add-on repetitive learning[J]. Neurocomputing, 2019, 323: 256-264. |
| [21] | JI N, LIU J K, YANG H J. Sliding mode control based on RBF neural network for a class of under-actuated systems with unknown sensor and actuator faults[J]. International Journal of Systems Science, 2020, 51(16): 3539-3549. |
| [22] | HUO X X, GE T, WANG X Y. Horizontal path-following control for deep-sea work-class ROVs based on a fuzzy logic system[J]. Ships and Offshore Structures, 2018, 13(6): 637-648. |
| [23] | LIU J K. Radial basis function (RBF) neural network control for mechanical systems[M]. Beijing: Tsinghua & Springer Press, 2013: 133-159. |
| [1] | 卜强生, 吕朋蓬, 李炜祺, 罗飞, 俞婧雯, 窦晓波, 胡秦然. 基于SLM-RBF的配电网分布式光伏集群智能划分策略[J]. 上海交通大学学报, 2024, 58(10): 1534-1543. |
| [2] | 钟科星, 丁乐声, 张 聪, 毛彦东, 陈金龙. 基于神经网络的风电海缆弯曲限制器优化设计[J]. 海洋工程装备与技术, 2024, 11(1): 70-76. |
| [3] | 张文安, 高伟展, 刘安东. 基于动态运动原语和自适应控制的机器人技能学习[J]. 上海交通大学学报, 2023, 57(3): 354-365. |
| [4] | 张晨宇, 孟帅. 基于模型预测控制的深海钻井立管再入井仿真分析[J]. 上海交通大学学报, 2023, 57(11): 1389-1399. |
| [5] | 丁明, 孟帅, 王书恒, 夏玺. 六自由度波浪补偿平台的神经网络自适应反馈线性化控制[J]. 上海交通大学学报, 2022, 56(2): 165-172. |
| [6] | 徐张宝,马大为,姚建勇,董振乐,杨贵超. 基于干扰估计的直流电动机间接自适应鲁棒控制[J]. 上海交通大学学报(自然版), 2015, 49(09): 1281-1287. |
| [7] | 师明华1,王旭2,谢磊1,赵路军3. 执行阀黏滞过程的控制性能评估[J]. 上海交通大学学报(自然版), 2014, 48(07): 1009-1014. |
| [8] | 程妍雪1,庞永杰1,杨卓懿1,冯亮2. 基于径向基神经网络模型的耐压壳6σ设计[J]. 上海交通大学学报(自然版), 2014, 48(04): 493-497. |
| [9] | 章斯亮1,朱平1,陈卫1,2. 基于两种不确定的稳健设计方法及其在车身轻量化设计中的应用[J]. 上海交通大学学报(自然版), 2013, 47(05): 834-839. |
| [10] | 段雪厚, 王石刚, 徐威, 唐成龙. 基于径向基神经网络的薄板平整轧制力预报模型[J]. 上海交通大学学报(自然版), 2011, 45(06): 924-928. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||