上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (5): 593-600.doi: 10.16183/j.cnki.jsjtu.2021.456
所属专题: 《上海交通大学学报》2023年“电子信息与电气工程”专题
位广宇1,2,3, 谷朝臣1,2,3( ), 杨舒盛1,2,3, 关新平1,2,3
), 杨舒盛1,2,3, 关新平1,2,3
收稿日期:2021-11-12
修回日期:2022-01-09
接受日期:2022-01-11
出版日期:2023-05-28
发布日期:2023-06-02
通讯作者:
谷朝臣
E-mail:jacygu@sjtu.edu.cn.
作者简介:位广宇(1997-),硕士生,从事高性能伺服与精密运动控制研究.
基金资助:
WEI Guangyu1,2,3, GU Chaochen1,2,3(), YANG Shusheng1,2,3, GUAN Xinping1,2,3
Received:2021-11-12
Revised:2022-01-09
Accepted:2022-01-11
Online:2023-05-28
Published:2023-06-02
Contact:
GU Chaochen
E-mail:jacygu@sjtu.edu.cn.
摘要:
针对采用非对称柔性支撑结构的龙门双驱运动平台,提出基于模型补偿扩张状态观测器的解耦与同步控制策略.考虑柔性支撑结构特点和负载加速度对龙门平动、转动模态的影响,采用拉格朗日方程建立了龙门动力学模型.依据该模型设计平动和转动控制回路并采用带有已知耦合项补偿的扩张状态观测器,估计并抑制由建模误差和未知耦合项等因素组成的总扰动.试验结果表明,该控制框架与解耦策略能有效解除双驱动轴间的动态耦合并抑制扰动,显著提升龙门试验台的动态响应和同步精度,且具有部署简单、所需测量模型参数少等优点.
中图分类号:
位广宇, 谷朝臣, 杨舒盛, 关新平. 非对称柔性支撑龙门双驱平台的解耦与同步控制[J]. 上海交通大学学报, 2023, 57(5): 593-600.
WEI Guangyu, GU Chaochen, YANG Shusheng, GUAN Xinping. Decoupling and Synchronization Control of Asymmetric Flexure-Linked Dual-Drive Gantry Stage[J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 593-600.

图1
非对称柔性支撑龙门双驱试验平台与其柔性支撑结构示意图

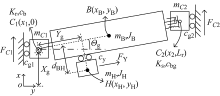
图2
非对称柔性支撑龙门双驱运动平台模型示意图
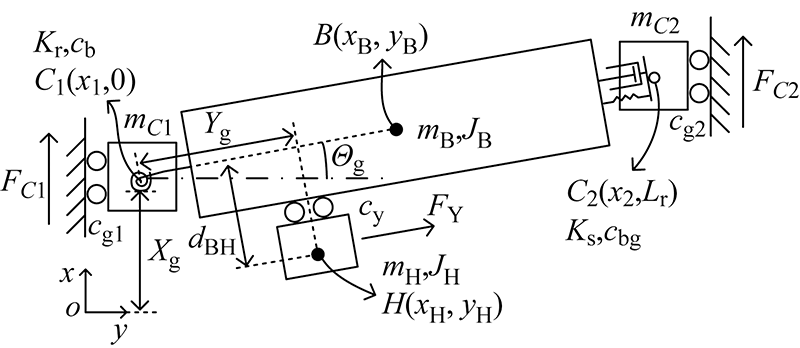
表1
龙门双驱试验台参数
| 参数 | 含义 | 取值 |
|---|---|---|
| mC1/kg | C1侧底座(含柔性支撑)总质量 | 9.9 |
| mC2/kg | C2侧底座(含柔性支撑)总质量 | 9.85 |
| mH/kg | 工作头(移动负载)质量 | 7.6 |
| mB/kg | 横梁质量 | 26.8 |
| JH/(kg·m2) | 工作头绕自身重心的转动惯量 | 0.038 |
| JB/(kg·m2) | 横梁绕自身重心的转动惯量 | 3.2 |
| dBH/m | 工作头(移动负载)重心偏移量 | 0.1 |
| Lr/m | 龙门试验台跨度 | 1.2 |
| Kr/(N·m·rad-1) | 回转柔性支撑的转动刚度 | 28 500 |
| Ks/(N·m-1) | 偏扭柔性支撑的刚度 | 125 000 |
| cg1,cg2/(N·m-1·s) | 双驱轴导轨阻尼系数 | 20.3 |
| cy/(N·m-1·s) | 横梁轴导轨阻尼系数 | 32.5 |
| cb/(N·m·rad-1·s) | 回转柔性支撑旋转阻尼系数 | 300 |
| cbg/(N·m-1·s) | 偏扭柔性支撑阻尼系数 | 3 750 |
| FC1,FC2 | 两侧电动机推力 | — |
| FY | 横梁轴电动机推力 | — |

图3
使用中图SJ6000激光干涉仪测量的重复定位精度结果

图4
龙门试验台在不同控制算法下对阶跃平动位置信号的响应曲线
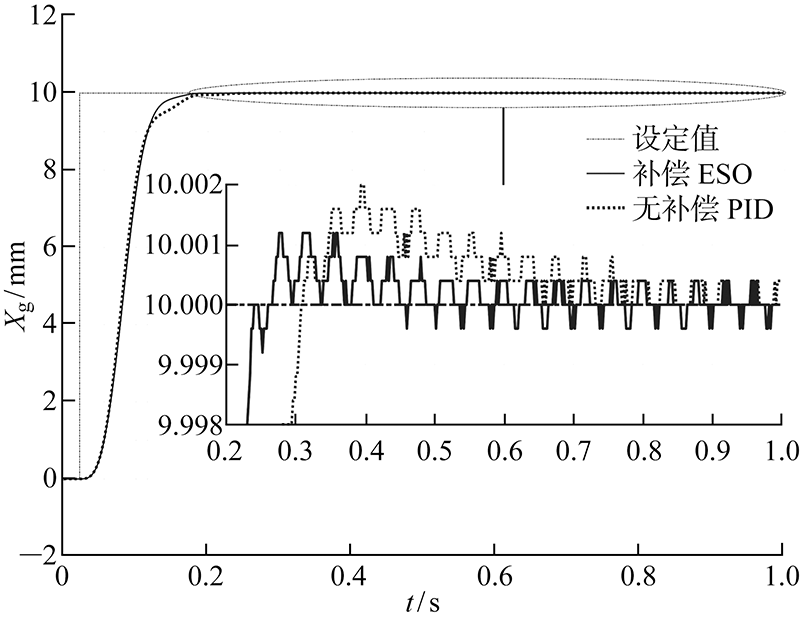
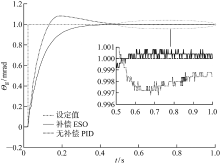
图5
龙门试验台在不同控制算法下对阶跃转动角度信号的响应曲线
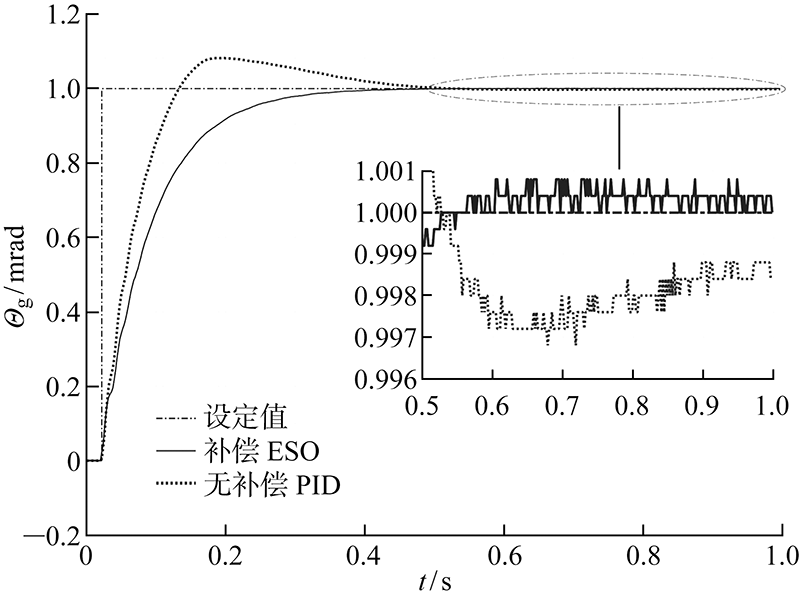
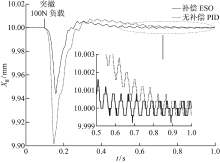
图6
龙门试验台在不同控制算法下对阶跃负载扰动信号的响应曲线
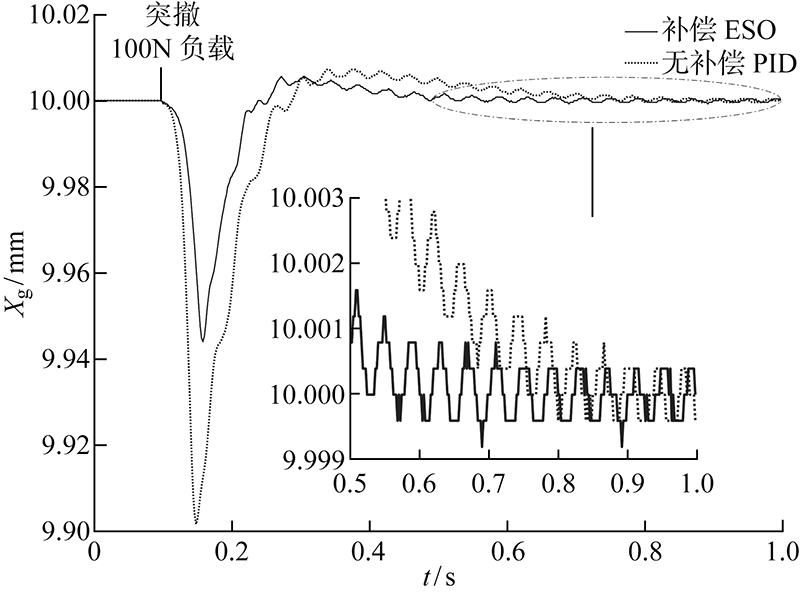
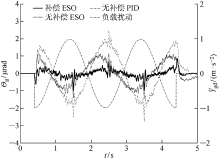
图7
龙门试验台在3种不同控制算法下对横梁轴负载余弦扰动的响应曲线

| [1] | 李超.冗余直驱龙门系统的多输入多输出精密运动控制[D]. 杭州: 浙江大学, 2018. |
| LI Chao. MIMO precision motion control of redundantly driven gantry systems with direct actuators[D]. Hangzhou: Zhejiang University, 2018. | |
| [2] |
KAMALDIN N, CHEN S L, TEO C S, et al. A novel adaptive jerk control with application to large workspace tracking on a flexure-linked dual-drive gantry[J]. IEEE Transactions on Industrial Electronics, 2019, 66(7): 5353-5363.
doi: 10.1109/TIE.2018.2870391 URL |
| [3] |
GIAM T S, TAN K K, HUANG S. Precision coordinated control of multi-axis gantry stages[J]. ISA Transactions, 2007, 46(3): 399-409.
pmid: 17434516 |
| [4] |
GARCÍA-HERREROS I, KESTELYN X, GOMAND J, et al. Model-based decoupling control method for dual-drive gantry stages: A case study with experimental validations[J]. Control Engineering Practice, 2013, 21(3): 298-307.
doi: 10.1016/j.conengprac.2012.10.010 URL |
| [5] |
MA J, CHEN S L, KAMALDIN N, et al. Integrated mechatronic design in the flexure-linked dual-drive gantry by constrained linear-quadratic optimization[J]. IEEE Transactions on Industrial Electronics, 2017, 65(3): 2408-2418.
doi: 10.1109/TIE.2017.2740825 URL |
| [6] | 黎炜天, 廖俊鸿, 王忠诚. 基于终端滑模控制的龙门平台同步控制设计[J]. 仪表技术, 2020(5): 36-40. |
| LI Weitian, LIAO Junhong, WANG Zhongcheng. Design of synchronous control on the gantry platform based on sliding mode control[J]. Instrumentation Technology, 2020(5): 36-40. | |
| [7] | 李萍, 朱国力, 龚时华, 等. 基于干扰观测器的龙门机床双驱系统的同步控制[J]. 中国机械工程, 2016, 27(19): 2630-2636. |
| LI Ping, ZHU Guoli, GONG Shihua, et al. Synchronous control of dual-drive system in gantry-type machine tools based on disturbance observer[J]. China Mechanical Engineering, 2016, 27(19): 2630-2636. | |
| [8] | JUNG H, OH S. Disturbance observer based decoupling control to suppress rotational motion of cross-coupled gantry stage[C]//2019 IEEE 28th International Symposium on Industrial Electronics. Vancouver, Canada: IEEE, 2019: 503-508. |
| [9] |
HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
doi: 10.1109/TIE.2008.2011621 URL |
| [10] |
YANG J, CHEN W H, LI S H, et al. Disturbance/uncertainty estimation and attenuation techniques in PMSM drives—A survey[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 3273-3285.
doi: 10.1109/TIE.2016.2583412 URL |
| [11] | 李大字, 李憧, 靳其兵. 不确定系统的滑模与自抗扰控制方法[J]. 上海交通大学学报, 2016, 50(6): 917-922. |
| LI Dazi, LI Chong, JIN Qibing. Sliding mode active disturbance rejection control of uncertain system[J]. Journal of Shanghai Jiao Tong University, 2016, 50(6): 917-922. | |
| [12] | LI P, ZHU G L, HE B N, et al. Synchronization control for dual-drive system of gantry-type machine tools based on extended state observer[C]// 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Auckland, New Zealand: IEEE, 2018: 1299-1304. |
| [13] | 谷朝臣, 位广宇, 杨舒盛. 龙门滑台柔性铰链支撑组件及其龙门双驱装置: CN 113334096 A[P]. 2021-09-03 [2021-11-10]. |
| GU Chaochen, WEI Guangyu, YANG Shusheng. Flexure link supporting component and dual-drive device for gantry positioning stage: CN 113334096 A[P]. 2021-09-03 [2021-11-10]. | |
| [14] | 王永岗. 分析力学[M]. 北京: 清华大学出版社, 2019. |
| WANG Yonggang. Analytical mechanics[M]. Beijing: Tsinghua University Press, 2019. | |
| [15] |
LI S H, YANG J, CHEN W H, et al. Generalized extended state observer based control for systems with mismatched uncertainties[J]. IEEE Transactions on Industrial Electronics, 2012, 59(12): 4792-4802.
doi: 10.1109/TIE.2011.2182011 URL |
| [1] | 郭子腾, 王晗, 王富文, 曹云峰, 张建文, 蔡旭. 惯性同步控制三相PWM变换器的四象限控制特性分析及参数设计[J]. 上海交通大学学报, 2026, 60(2): 277-288. |
| [2] | . 基于改进型自抗扰控制的欠驱动系统控制[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 428-439. |
| [3] | . DSNet:用于语音情感识别的带有中性校准的解耦孪生网络[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 248-257. |
| [4] | 李聪林, 皇金锋, 章乾, 陈旭. 基于高阶滤波超螺旋ESO的单电感双输出Buck变换器滑模自抗扰控制[J]. 上海交通大学学报, 2026, 60(1): 87-99. |
| [5] | 皇金锋, 章乾. 基于超螺旋扩张状态观测器的耦合单电感双输出Buck变换器串级滑模解耦控制[J]. 上海交通大学学报, 2025, 59(5): 592-604. |
| [6] | 蒋标, 刘佳, 曾平良, 唐早, 李亚楼. 考虑碳交易量自适应决策的输电网两阶段鲁棒规划[J]. 上海交通大学学报, 2024, 58(6): 826-835. |
| [7] | 章涛, 张雪瑞, 陈勇, 钟科林, 罗其俊. 面向民机可视导航的场面多尺度目标检测[J]. 上海交通大学学报, 2024, 58(11): 1816-1825. |
| [8] | 王先至, 李国飞, 常亚南. 基于分布式扩张状态观测器的多飞行器编队控制[J]. 上海交通大学学报, 2024, 58(11): 1798-1804. |
| [9] | 陈静, 柯世堂, 李文杰, 朱庭瑞, 员亦雯, 任贺贺. 浅海风-浪-流-海床耦合场非定常时空演化规律及评价指标[J]. 上海交通大学学报, 2023, 57(6): 666-679. |
| [10] | 陶海军, 杜长顺, 张金生, 郑征. 海洋电磁发射机二级母线冲击电压产生机理及抑制[J]. 上海交通大学学报, 2023, 57(12): 1597-1608. |
| [11] | 吕硕, 张庆振, 郭云鹤, 丰硕. 基于反步滑模的偏转弹头导弹姿态控制[J]. 空天防御, 2022, 5(4): 30-37. |
| [12] | 李晗, 张波涛, 王俊杰, 孙运达, 龚圣捷. 光纤光栅传感器振动与温度信号解耦[J]. 上海交通大学学报, 2022, 56(2): 214-222. |
| [13] | 万慧, 齐晓慧, 李杰. 基于线性矩阵不等式的线性/非线性切换自抗扰控制系统的稳定性分析[J]. 上海交通大学学报, 2022, 56(11): 1491-1501. |
| [14] | 李庆波, 方泽远, 陈国良, 梅志伟, 杨婷. 基于跟踪微分器的捷联导引头解耦算法研究[J]. 空天防御, 2021, 4(4): 44-49. |
| [15] | 侯珏, 姚栋伟, 吴锋, 吕成磊, 王涵, 沈俊昊. 混合励磁电机的电动汽车增程器控制策略[J]. 上海交通大学学报, 2021, 55(2): 206-212. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||