上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (3): 354-365.doi: 10.16183/j.cnki.jsjtu.2021.379
所属专题: 《上海交通大学学报》2023年“电子信息与电气工程”专题
张文安( ), 高伟展, 刘安东
), 高伟展, 刘安东
收稿日期:2021-09-26
接受日期:2021-11-05
出版日期:2023-03-28
发布日期:2023-03-30
作者简介:张文安(1982-),教授,博士生导师,现主要从事多源信息融合、机器人技能学习研究;E-mail:基金资助:
ZHANG Wenan(), GAO Weizhan, LIU Andong
Received:2021-09-26
Accepted:2021-11-05
Online:2023-03-28
Published:2023-03-30
摘要:
提出一种基于动态运动原语(DMP)和自适应控制的机器人技能学习方法. 现有的DMP从单示教轨迹中学习动作,且其高斯基函数分布方式固定,并不适用于各种不同特征的动作轨迹. 因此,将高斯混合模型和高斯混合回归引入DMP中,使其能从多示教轨迹中学习技能,并且将径向基神经网络(RBFNN)引入DMP中构成RBF-DMP方法,以梯度下降的方式学习高斯基中心位置和权重,提高技能学习的精度.设计自适应神经网络控制器,用于控制机械臂复现示教中学习的动作. 在Franka Emika Panda协作机械臂上开展实验研究,验证方法的有效性.
中图分类号:
张文安, 高伟展, 刘安东. 基于动态运动原语和自适应控制的机器人技能学习[J]. 上海交通大学学报, 2023, 57(3): 354-365.
ZHANG Wenan, GAO Weizhan, LIU Andong. Robot Skill Learning Based on Dynamic Motion Primitives and Adaptive Control[J]. Journal of Shanghai Jiao Tong University, 2023, 57(3): 354-365.

图1
DMP和RBF-DMP拟合同一技能得到的高斯基中心位ci的分布
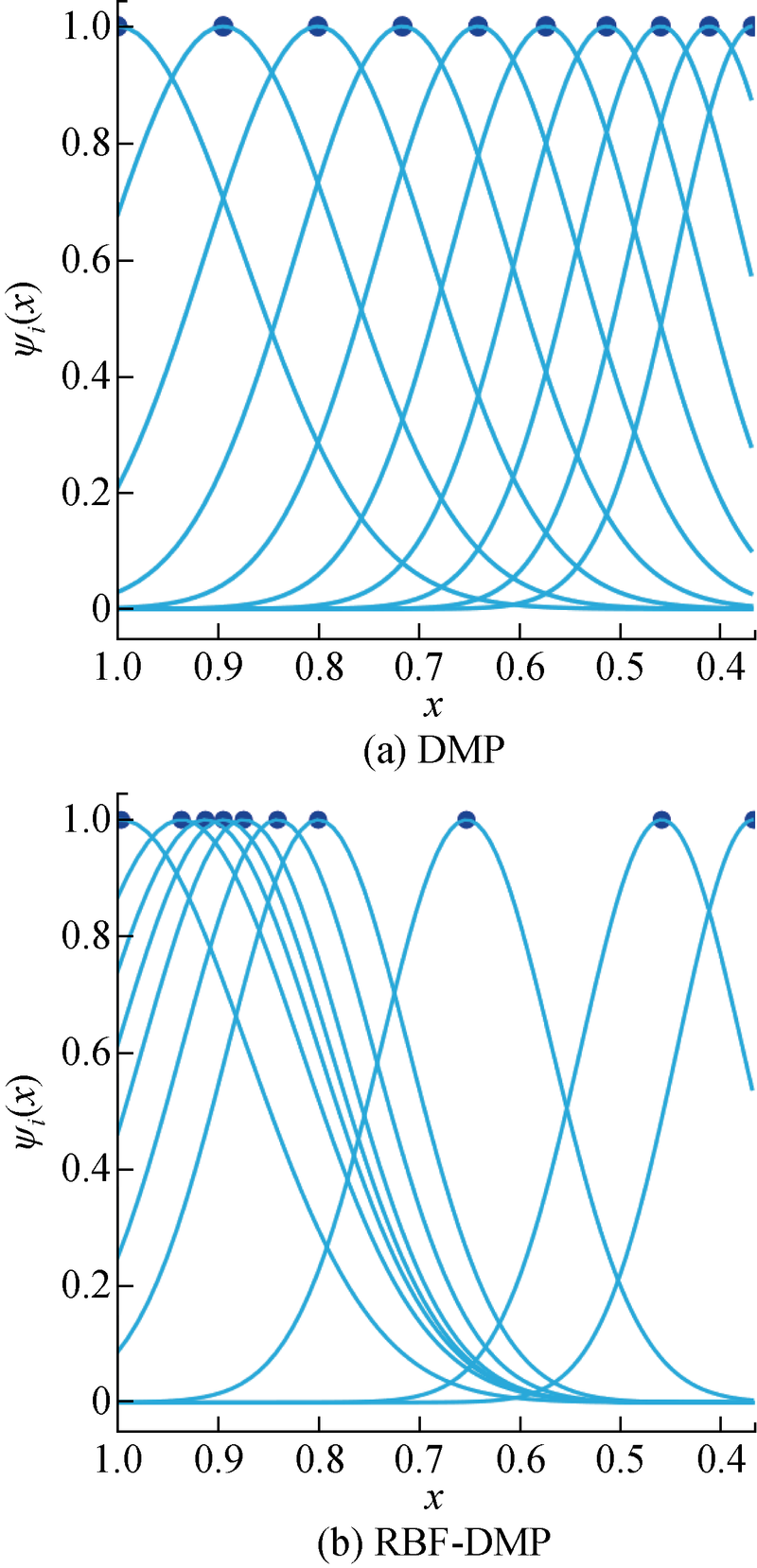
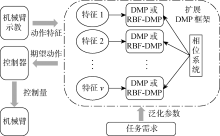
图2
结合DMP和RBF-DMP的DMP扩展框架

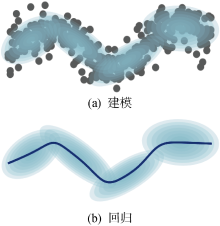
图3
使用GMM和GMR对DMP的强迫项进行建模和回归

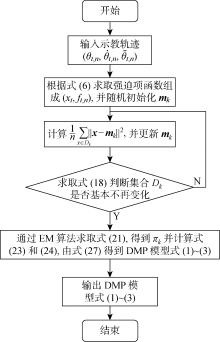
图4
改进DMP算法流程图

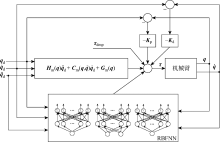
图5
闭环控制系统框图
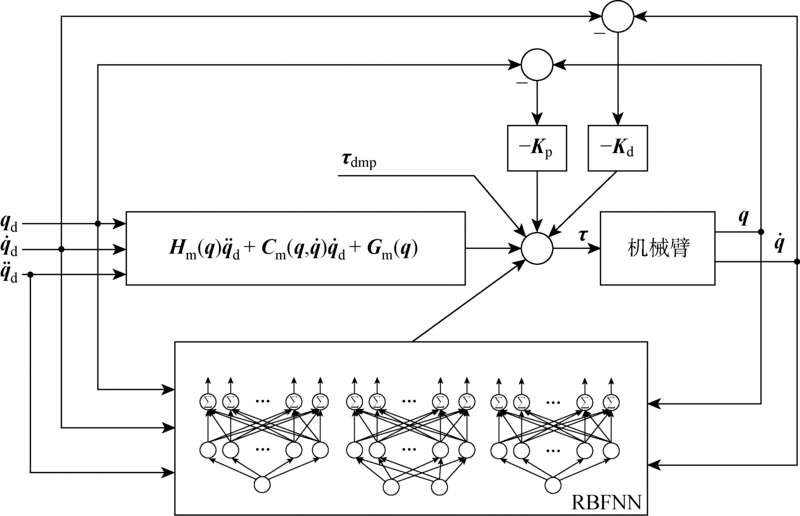
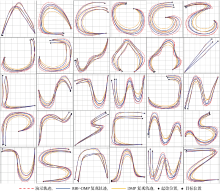
图6
DMP和RBF-DMP在LASA数据集上的复现结果
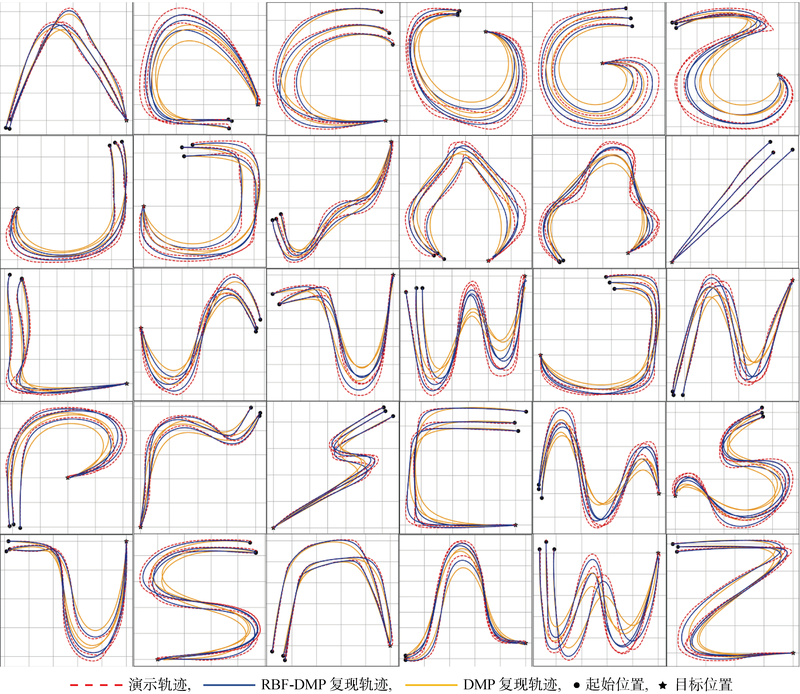

图7
DMP和RBF-DMP在LASA数据集上MSE分析

表1
DMP、RBF-DMP算法和扩展框架在LASA数据集上的性能比较
| 方法 | 总MSE | 总建模时间/s |
|---|---|---|
| DMP | 1.628 | 12.91 |
| RBF-DMP | 1.011 | 16.24 |
| 拓展框架 | 1.193 | 13.98 |

图8
物块搬运的演示过程
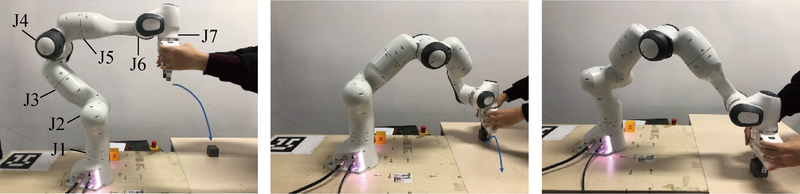
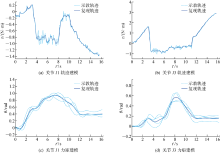
图9
基于改进DMP和RBF-DMP的动作特征建模

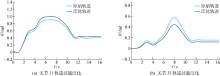
图10
动作泛化
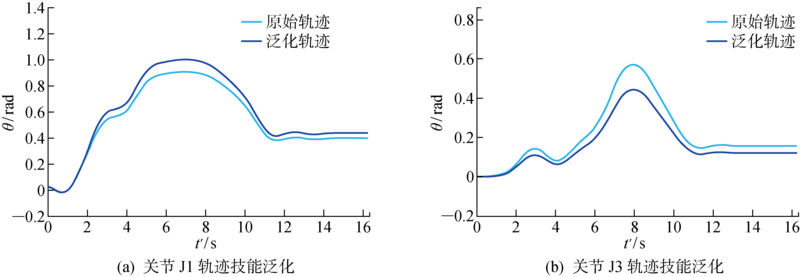

图11
机器人技能学习系统

图12
机械臂复现并泛化技能
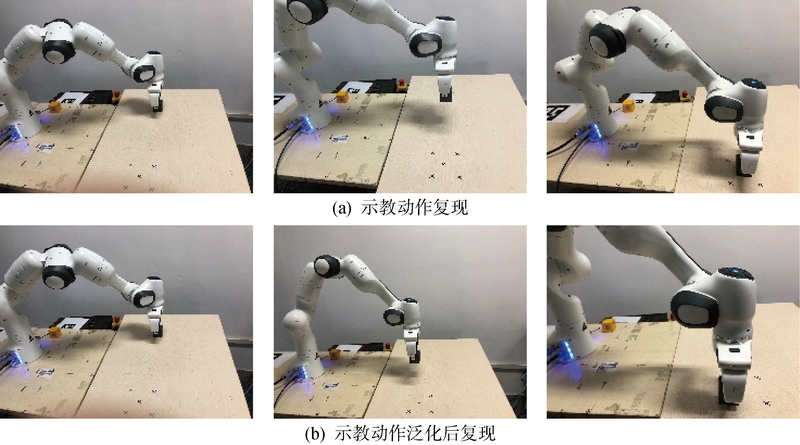
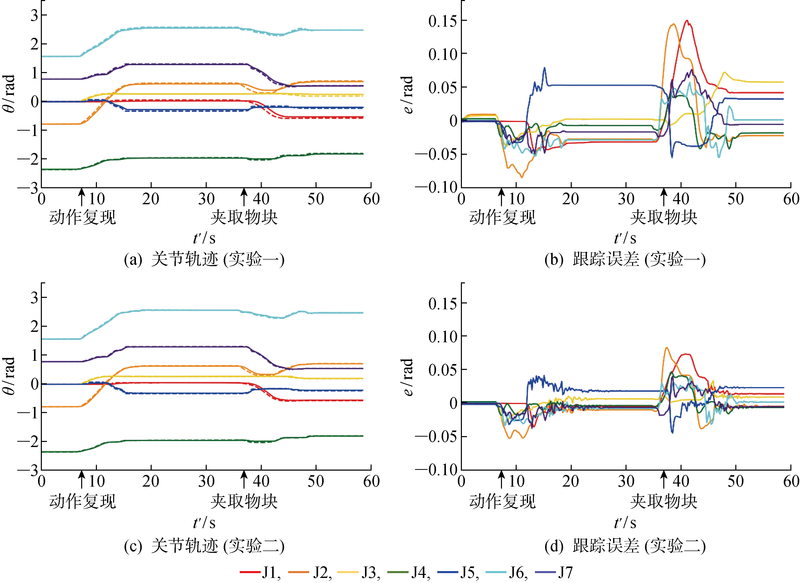
图13
机械臂的期望关节轨迹和实际关节轨迹 以及跟踪误差曲线
| [1] | 马良, 徐晓兰, 丁汉, 等. 2019年中国机器人产业发展报告[R]. 北京: 中国电子学会, 2019. |
| MA Liang, XU Xiaolan, DING Han, et al. China robot industry development report 2019[R]. Beijing: China Electronics Association, 2019. | |
| [2] | EWERTON M, MAEDA G, KOLLEGGER G, et al. Incremental imitation learning of context-dependent motor skills[C]// 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids). Cancun, Mexico: IEEE, 2016: 351-358. |
| [3] | BROCK O, KHATIB O. Elastic strips: A framework for integrated planning and execution[C]// Experimental Robotics VI. London: Springer, 2000: 329-338. |
| [4] | ZHANG H W, LENG Y Q. Motor skills learning and generalization with adapted curvilinear Gaussian mixture model[J]. Journal of Intelligent & Robotic Systems, 2019, 96(3/4): 457-475. |
| [5] | CHANG G T, KULIĆ D. Motion learning from observation using affinity propagation clustering[C]// 2013 IEEE RO-MAN. Gyeongju, Korea (South): IEEE, 2013: 662-667. |
| [6] |
IJSPEERT A J, NAKANISHI J, HOFFMANN H, et al. Dynamical movement primitives: Learning attractor models for motor behaviors[J]. Neural Computation, 2013, 25(2): 328-373.
doi: 10.1162/NECO_a_00393 pmid: 23148415 |
| [7] | MEIER F, SCHAAL S. A probabilistic representation for dynamic movement primitives[EB/OL]. (2016-12-18) [2021-06-05]. https://arxiv.org/abs/1612.05932. |
| [8] | GAŠPAR T, NEMEC B, MORIMOTO J, et al. Skill learning and action recognition by arc-length dynamic movement primitives[J]. Robotics & Autonomous Systems, 2018, 100: 225-235. |
| [9] | LI J J, LI Z J, LI X D, et al. Skill learning strategy based on dynamic motion primitives for human-robot cooperative manipulation[J]. IEEE Transactions on Cognitive & Developmental Systems, 2021, 13(1): 105-117. |
| [10] |
YANG C G, JIANG Y M, LI Z J, et al. Neural control of bimanual robots with guaranteed global stability and motion precision[J]. IEEE Transactions on Industrial Informatics, 2017, 13(3): 1162-1171.
doi: 10.1109/TII.2016.2612646 URL |
| [11] |
BECKERS T, UMLAUFT J, HIRCHE S. Stable model-based control with Gaussian process regression for robot manipulators[J]. IFAC-PapersOnLine, 2017, 50(1): 3877-3884.
doi: 10.1016/j.ifacol.2017.08.359 URL |
| [12] |
YANG C G, JIANG Y M, NA J, et al. Finite-time convergence adaptive fuzzy control for dual-arm robot with unknown kinematics and dynamics[J]. IEEE Transactions on Fuzzy Systems, 2019, 27(3): 574-588.
doi: 10.1109/TFUZZ.91 URL |
| [13] | ZHANG S, DONG Y T, OUYANG Y C, et al. Adaptive neural control for robotic manipulators with output constraints and uncertainties[J]. IEEE Transactions on Neural Networks & Learning Systems, 2018, 29(11): 5554-5564. |
| [14] |
ZHANG Y Y, CHEN S Y, LI S, et al. Adaptive projection neural network for kinematic control of redundant manipulators with unknown physical parameters[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4909-4920.
doi: 10.1109/TIE.41 URL |
| [15] |
XU Z H, LI S, ZHOU X F, et al. Dynamic neural networks based kinematic control for redundant manipulators with model uncertainties[J]. Neurocomputing, 2019, 329: 255-266.
doi: 10.1016/j.neucom.2018.11.001 URL |
| [16] | MAO Z Y, ZHAO F L. Structure optimization of a vibration suppression device for underwater moored platforms using CFD and neural network[J]. Complexity, 2017, 2017: 5392539. |
| [17] | YIN X C, CHEN Q J. Learning nonlinear dynamical system for movement primitives[C]// 2014 IEEE International Conference on Systems, Man, and Cybernetics. San Diego, USA: IEEE, 2014: 3761-3766. |
| [18] | YANG C G, CHEN C Z, HE W, et al. Robot learning system based on adaptive neural control and dynamic movement primitives[J]. IEEE Transactions on Neural Networks & Learning Systems, 2019, 30(3): 777-787. |
| [19] |
YANG C G, WANG X Y, CHENG L, et al. Neural-learning-based telerobot control with guaranteed performance[J]. IEEE Transactions on Cybernetics, 2017, 47(10): 3148-3159.
doi: 10.1109/TCYB.2016.2573837 pmid: 28113610 |
| [20] | YANG C G, WANG X J, LI Z J, et al. Teleoperation control based on combination of wave variable and neural networks[J]. IEEE Transactions on Systems, Man, & Cybernetics: Systems, 2017, 47(8): 2125-2136. |
| [21] | GHORBEL F, SRINIVASAN B, SPONG M. On the positive definiteness and uniform boundedness of the inertia matrix of robot manipulators[C]// Proceedings of 32nd IEEE Conference on Decision and Control. San Antonio, USA: IEEE, 1993: 1103-1108. |
| [1] | 刘林, 杨丝雨, 黄夏楠, 陈延滔, 徐化帅, 王玲玲, 蒋传文. 数据-模型混合驱动的电动汽车集群行为模拟方法[J]. 上海交通大学学报, 2026, 60(1): 51-60. |
| [2] | 王向磊, 刘秀全, 刘兆伟, 畅元江, 陈国明. 系统不确定的深海钻井立管解脱反冲智能控制[J]. 上海交通大学学报, 2024, 58(11): 1698-1706. |
| [3] | 卜强生, 吕朋蓬, 李炜祺, 罗飞, 俞婧雯, 窦晓波, 胡秦然. 基于SLM-RBF的配电网分布式光伏集群智能划分策略[J]. 上海交通大学学报, 2024, 58(10): 1534-1543. |
| [4] | 钟科星, 丁乐声, 张 聪, 毛彦东, 陈金龙. 基于神经网络的风电海缆弯曲限制器优化设计[J]. 海洋工程装备与技术, 2024, 11(1): 70-76. |
| [5] | 胡铭轩, 乔钧, 张执南. 连续康复训练动作分割与评估[J]. 上海交通大学学报, 2023, 57(5): 533-544. |
| [6] | 丁明, 孟帅, 王书恒, 夏玺. 六自由度波浪补偿平台的神经网络自适应反馈线性化控制[J]. 上海交通大学学报, 2022, 56(2): 165-172. |
| [7] | 贾晓立,江晓波,蒋三新,刘佩林. 利用结构特征的语音压缩感知重建算法[J]. 上海交通大学学报, 2017, 51(9): 1111-1116. |
| [8] | 余昊a,孙锬锋a,b,蒋兴浩a,b. 基于光流块统计特征的视频异常行为检测算法[J]. 上海交通大学学报(自然版), 2015, 49(08): 1199-1204. |
| [9] | 师明华1,王旭2,谢磊1,赵路军3. 执行阀黏滞过程的控制性能评估[J]. 上海交通大学学报(自然版), 2014, 48(07): 1009-1014. |
| [10] | 程妍雪1,庞永杰1,杨卓懿1,冯亮2. 基于径向基神经网络模型的耐压壳6σ设计[J]. 上海交通大学学报(自然版), 2014, 48(04): 493-497. |
| [11] | 段雪厚, 王石刚, 徐威, 唐成龙. 基于径向基神经网络的薄板平整轧制力预报模型[J]. 上海交通大学学报(自然版), 2011, 45(06): 924-928. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||