上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (11): 1467-1475.doi: 10.16183/j.cnki.jsjtu.2020.283
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“机械工程”专题
葛世程, 郭着雨, 梁熙, 莫宗来, 李军( )
)
收稿日期:2020-09-08
出版日期:2021-11-28
发布日期:2021-12-03
通讯作者:
李军
E-mail:leejun_nust@163.com
作者简介:葛世程(1996-),男,广西壮族自治区南宁市人,硕士生,主要从事火箭炮发射箱吊装系统设计及结构优化研究.
GE Shicheng, GUO Zhuoyu, LIANG Xi, MO Zonglai, LI Jun()
Received:2020-09-08
Online:2021-11-28
Published:2021-12-03
Contact:
LI Jun
E-mail:leejun_nust@163.com
摘要:
针对目前野战火箭炮发射箱装填过程的对准问题,提出一种新型末端执行机构——摆动柔顺式吊钩,并对其结构参数进行优化.首先,基于节点位移法建立描述摆动柔顺式吊钩性能的理论模型,并通过MATLAB分析摆动柔顺式吊钩的静态位移、静态应力和摆动曲线,验证模型工作的合理性.同时,采用实验设计方法筛选影响摆动柔顺式吊钩性能的主要结构参数,并建立表征摆动柔顺式吊钩综合性能的响应面模型.优化结果表明,当柔性机构长度为90 mm,其安装高度为23 mm,吊钩末端高度为110 mm时,摆动柔顺式吊钩在对接、起吊、转运和落装时的性能最优.
中图分类号:
葛世程, 郭着雨, 梁熙, 莫宗来, 李军. 摆动柔顺式吊钩结构参数的多目标优化[J]. 上海交通大学学报, 2021, 55(11): 1467-1475.
GE Shicheng, GUO Zhuoyu, LIANG Xi, MO Zonglai, LI Jun. Multi-Objective Optimization for Structural Parameters of Swing-Compliant Hook[J]. Journal of Shanghai Jiao Tong University, 2021, 55(11): 1467-1475.
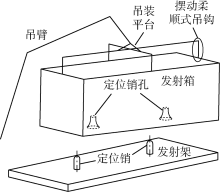
图1
柔性装填系统示意图
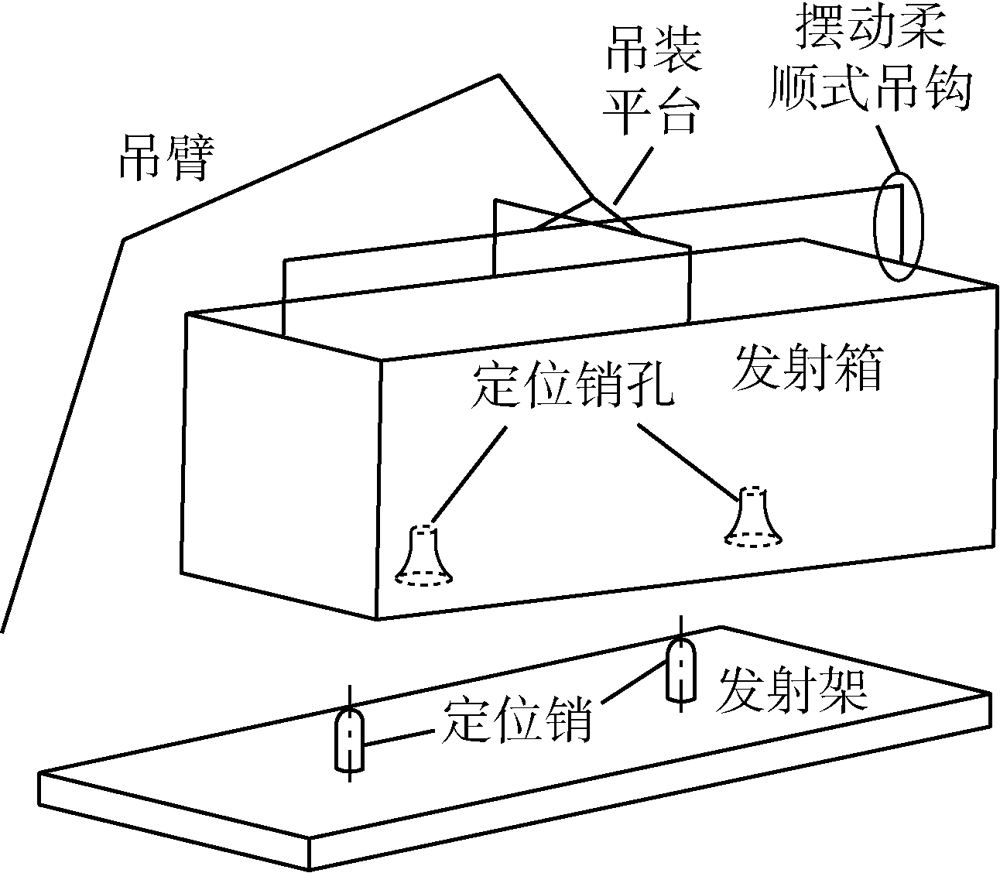
图2
摆动柔顺式吊钩几何模型
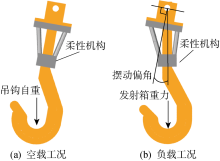
图3
摆动柔顺式吊钩工作原理

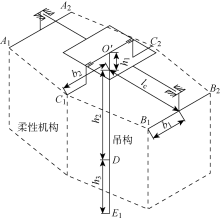
图4
摆动柔顺式吊钩简化图
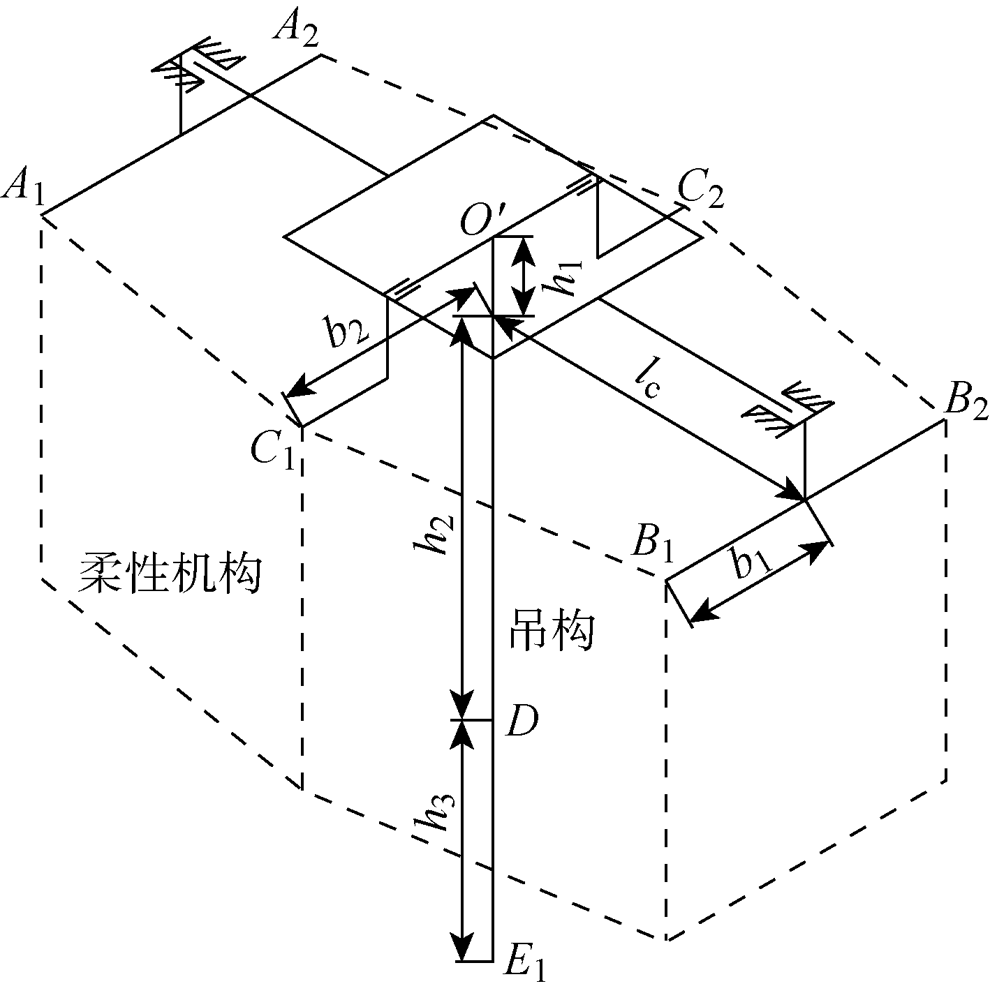
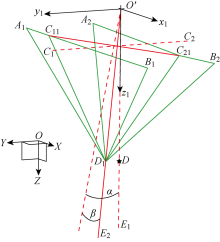
图5
坐标系定义和柔性机构离散
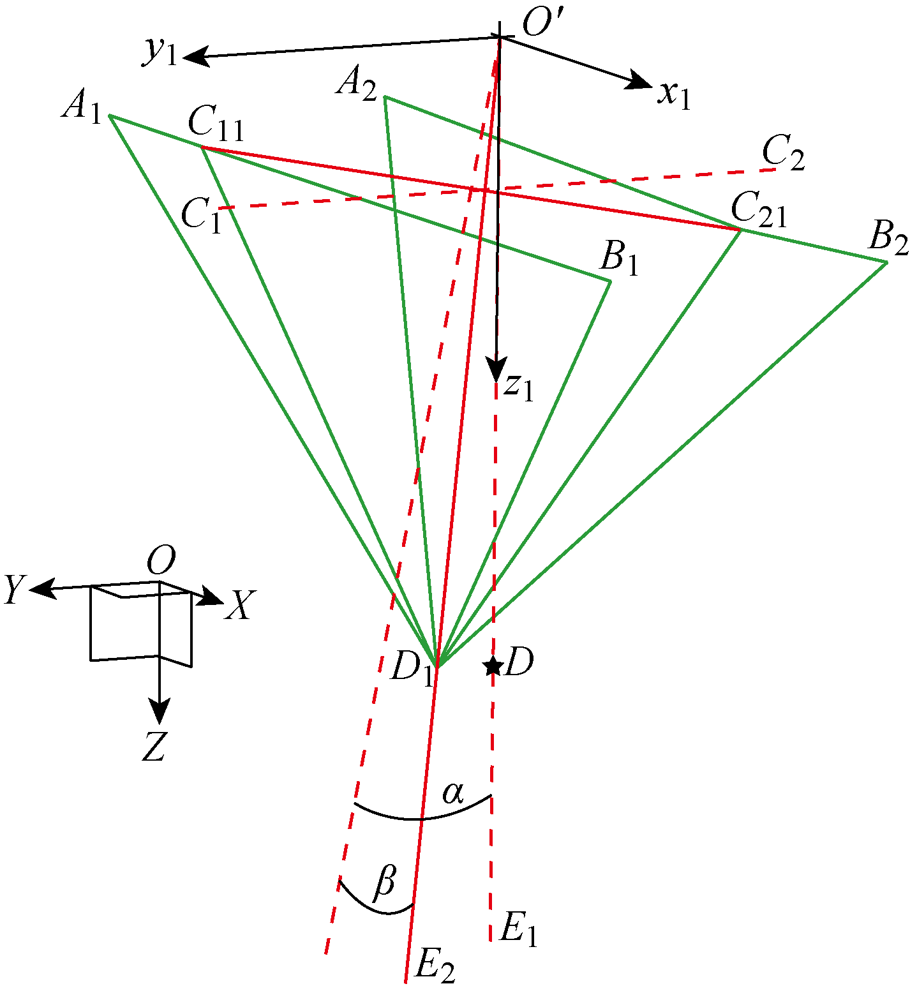
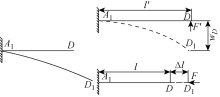
图6
A1D单元抵抗力分解图
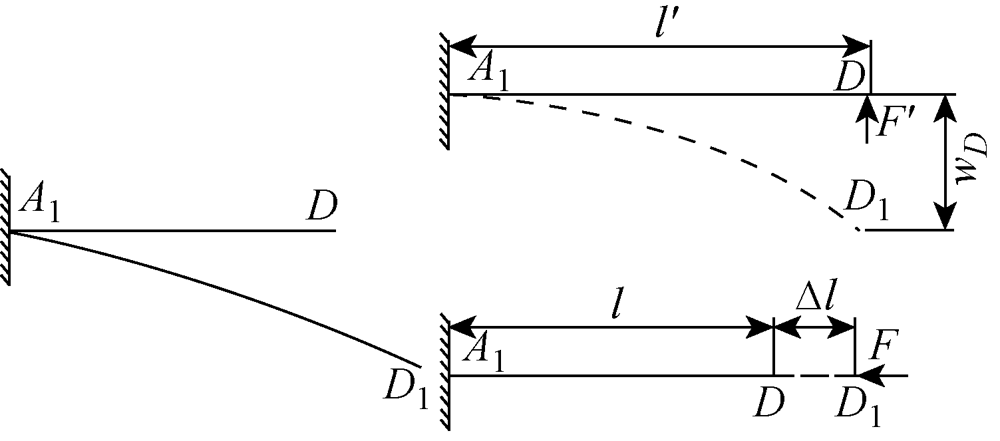

图7
Abaqus静态检验
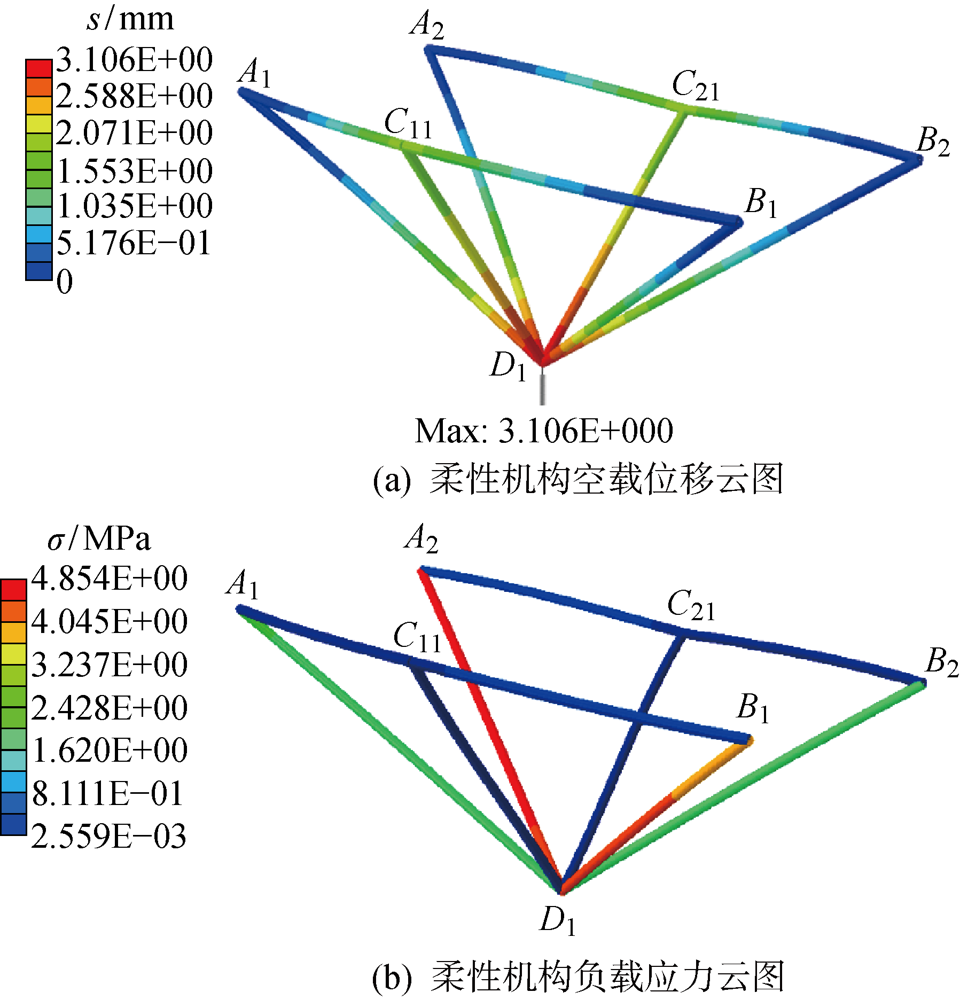
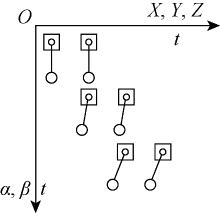
图8
吊钩运动分解图
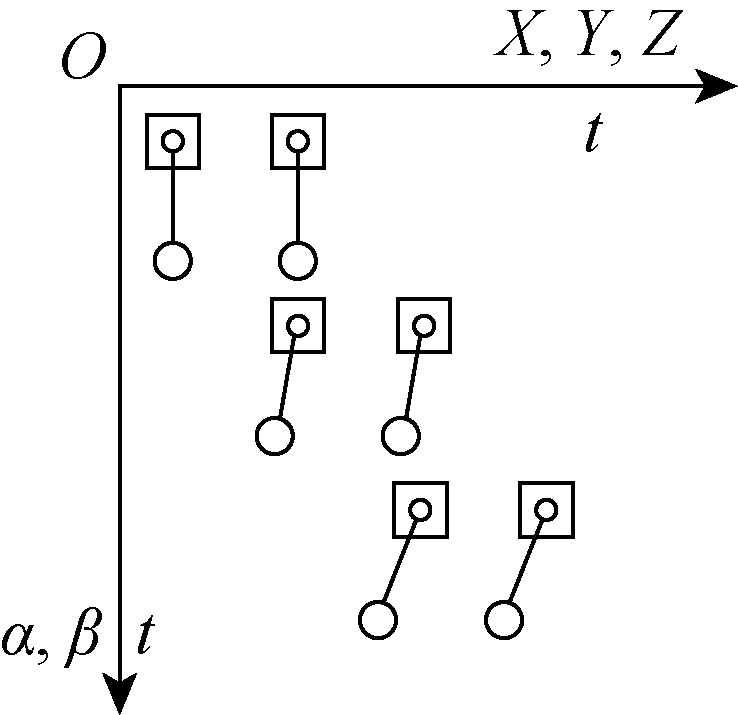
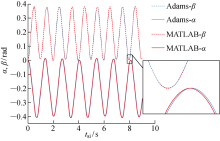
图9
吊钩动力学模型检验
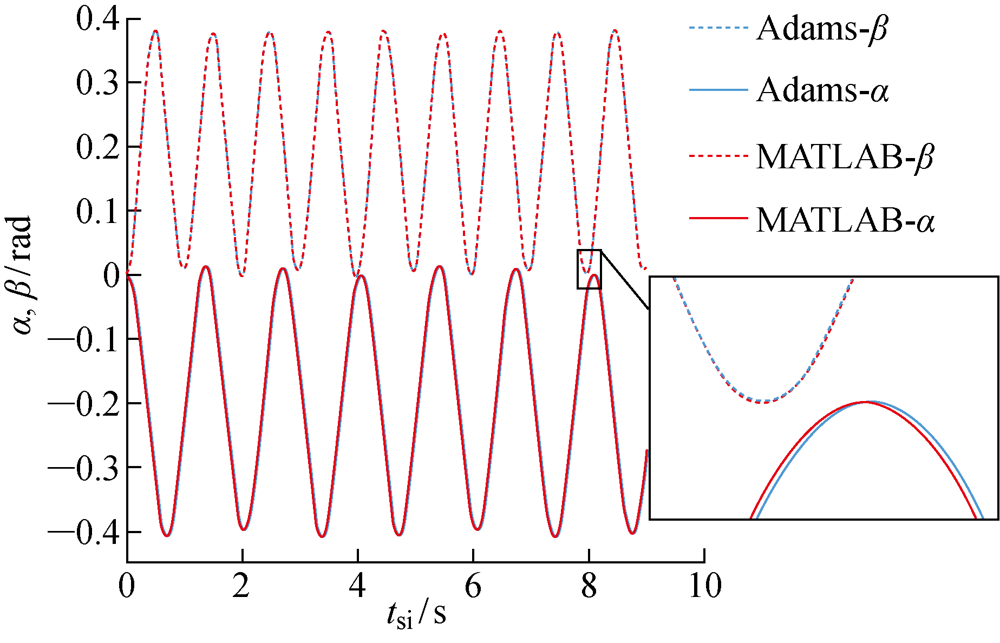
表1
摆动柔顺式吊钩优化目标
| 工况 | 目标 |
|---|---|
| 空载 | α1、β1最小; tα、tβ最短 |
| 负载 | α2、β2最大;σsum、σmax最小 |
表2
摆动柔顺式吊钩参数设置
| 参数 | 最小值 | 步距 | 最大值 | 预设值 |
|---|---|---|---|---|
| lc/mm | 70 | 5 | 130 | 100 |
| b1/mm | 10 | 5 | 70 | 40 |
| b2/mm | 30 | 5 | 90 | 60 |
| h1/mm | 10 | 5 | 70 | 40 |
| h2/mm | 40 | 5 | 100 | 70 |
| h3/mm | 110 | 5 | 170 | 140 |
表3
单因素分析结果
| 性能参数 | 初始性能 参考取值 | 正相关 参数/mm | 负相关 参数/mm |
|---|---|---|---|
| α1/rad | -0.025 | lc | b1 |
| β1/rad | 0.005 | b1 | h1 |
| α2/rad | -0.189 | lc | b1、h1 |
| β2/rad | 0.158 | b1 | h1 |
| σsum/MPa | 25.21 | h1 | lc、b1 |
| σmax/MPa | 5.37 | b1、 h1 | lc |
| tα/s | 10.35 | lc、h3 | h1、b2 |
| tβ/s | 6.51 | lc、b2、h3 | h1 |
表4
参数对响应量的贡献度
| 参数 | θ1贡献度/% | θ2贡献度/% | σr贡献度/% | tr贡献度/% |
|---|---|---|---|---|
| lc | 7.822 | 2.046 | -21.556 | 22.798 |
| b1 | -37.772 | -0.713 | -2.420 | -0.104 |
| b2 | -2.454 | -0.169 | 0.403 | -8.854 |
| h1 | -31.504 | -76.900 | 62.038 | -32.084 |
| h2 | -0.279 | -0.310 | -1.241 | -4.160 |
| h3 | 0.619 | 4.425 | 0 | 6.454 |
表5
响应面模型误差分析
| 输出响应 | R2 | |
|---|---|---|
| R1 | 0.9991 | 0.9980 |
| R2 | 0.9984 | 0.9963 |
| R3 | 0.9969 | 0.9930 |
| R4 | 0.9994 | 0.9987 |
| R5 | 0.9996 | 0.9991 |
| R6 | 0.9999 | 0.9999 |
| R7 | 0.9985 | 0.9966 |
| R8 | 0.9981 | 0.9956 |
表6
实验因子的部分优化解集
| 序号 | lc/mm | h1/mm | h3/mm |
|---|---|---|---|
| 1 | 90.61 | 22.39 | 110 |
| 2 | 94.87 | 23.32 | 110 |
| 3 | 106.05 | 28.49 | 110 |
表7
优化结果比较
| 性能参数 | 初始性能参数取值 | 优化后性能参数取值 |
|---|---|---|
| α1/rad | -0.025 | -0.012 |
| β1/rad | 0.005 | 0.007 |
| α2/rad | -0.189 | -0.180 |
| β2/rad | 0.158 | 0.169 |
| σsum/MPa | 25.21 | 20.33 |
| σmax/MPa | 5.37 | 4.91 |
| tα/s | 10.35 | 8.38 |
| tβ/s | 6.51 | 5.73 |
| [1] | 李军, 马大为, 曹听荣, 等. 火箭发射系统设计[M]. 北京: 国防工业出版社, 2008. |
| LI Jun, MA Dawei, CAO Tinrong, et al. Design of rockets launching system[M]. Beijing: National Defense Industry Press, 2008. | |
| [2] | 曾令梦. 储运发箱的高精度自动吊装方法研究[D]. 南京: 南京理工大学, 2018. |
| ZENG Lingmeng. Research on high-precision automatic hoisting method of launching box[D]. Nanjing: Nanjing University of Science and Technology, 2018. | |
| [3] |
HAN G D, ZHANG T, CHEN H Q, et al. Sling tray mechanical anti-swing system simulation and modeling of ship-mounted crane[J]. MATEC Web of Conferences, 2017, 104:02016.
doi: 10.1051/matecconf/201710402016 URL |
| [4] | 张敏. 啤酒灌装生产线机器人码垛吊具设计与分析[D]. 南京: 南京理工大学, 2015. |
| ZHANG Min. Design and analysis of robot stacking spreader for beer production line[D]. Nanjing: Nanjing University of Science and Technology, 2015. | |
| [5] | 黄海, 张国成, 杨溢. 水下无人航行器机械手系统动力学建模与协调运动轨迹优化[J]. 上海交通大学学报, 2016, 50(9):1437-1443. |
| HUANG Hai, ZHANG Guocheng, YANG Yi. Dynamic modeling and coordinate motion trajectory optimization for underwater vehicle and manipulator system[J]. Journal of Shanghai Jiao Tong University, 2016, 50(9):1437-1443. | |
| [6] |
PAN H T, GAO X, HUANG J J, et al. Design and implementation of 3-DOF gripper for maintenances tasks in EAST vacuum vessel[J]. Fusion Engineering and Design, 2018, 127:40-49.
doi: 10.1016/j.fusengdes.2017.12.026 URL |
| [7] | HOWELL L L. Introduction to compliant mechanisms[M]∥ Handbook of compliant mechanisms. Oxford, UK: John Wiley & Sons Ltd., 2013: 1-13. |
| [8] | 杨毅, 鹿碧洲, 李小毛, 等. 一种2自由度柔顺移动并联机构研究及其在对接装置上应用[J]. 机械工程学报, 2019, 55(11):114-122. |
| YANG Yi, LU Bizhou, LI Xiaomao, et al. Investigation of 2-DOF compliant translational parallel mechanism and applied in the docking device[J]. Journal of Mechanical Engineering, 2019, 55(11):114-122. | |
| [9] | 董悫, 张立建, 易旺民, 等. 基于动力学前馈的空间机器人多销孔装配力柔顺控制[J]. 机械工程学报, 2019, 55(4):207-217. |
| DONG Que, ZHANG Lijian, YI Wangmin, et al. Force compliance control of multi-peg-in-hole assembling by space robot based on dynamic feedforward[J]. Journal of Mechanical Engineering, 2019, 55(4):207-217. | |
| [10] | 游嘉伟, 顿向明, 山磊, 等. 运载火箭推进剂加注机器人机构设计[J]. 机电一体化, 2016, 22(4):41-44. |
| YOU Jiawei, DUN Xiangming, SHAN Lei, et al. Mechanism design of carrier rocket propellant filling robot[J]. Mechatronics, 2016, 22(4):41-44. | |
| [11] | 黄剑斌, 黄龙飞, 韩旭, 等. 对卫星柔性对接补加一体化机构建模与设计[J]. 空间控制技术与应用, 2018, 44(5):30-37. |
| HUANG Jianbin, HUANG Longfei, HAN Xu, et al. Modelling and designing of the flexible docking and fueling mechanism for the satellites[J]. Aerospace Control and Application, 2018, 44(5):30-37. | |
| [12] | 韩伟. 柔性锥—杆式对接机构刚柔耦合动力学研究[D]. 长沙: 国防科学技术大学, 2016. |
| HAN Wei. Research on rigid-flexible coupling dynamics of flexible cone-probe docking mechanism[D]. Changsha: National University of Defense Technology, 2016. | |
| [13] |
NAN B, BAI Y K, WU Y. Multi-objective optimization of spatially truss structures based on node movement[J]. Applied Sciences, 2020, 10(6):1964.
doi: 10.3390/app10061964 URL |
| [14] |
ZHAO D, GUO H. A trajectory planning method for polishing optical elements based on a non-uniform rational B-spline curve[J]. Applied Sciences, 2018, 8(8):1355.
doi: 10.3390/app8081355 URL |
| [15] |
ZHANG N, SHANG W W, CONG S. Dynamic trajectory planning for a spatial 3-DoF cable-suspended parallel robot[J]. Mechanism and Machine Theory, 2018, 122:177-196.
doi: 10.1016/j.mechmachtheory.2017.12.023 URL |
| [16] |
LI L, XIAO J D, ZOU Y B, et al. Time-optimal path tracking for robots a numerical integration-like approach combined with an iterative learning algorithm[J]. Industrial Robot: The International Journal of Robotics Research and Application, 2019, 46(6):763-778.
doi: 10.1108/IR-03-2019-0063 URL |
| [17] |
ALTUZARRA O, CABALLERO D, CAMPA F J, et al. Position analysis in planar parallel continuum mechanisms[J]. Mechanism and Machine Theory, 2019, 132:13-29.
doi: 10.1016/j.mechmachtheory.2018.10.014 URL |
| [18] |
LIU Q B, SHI W K, CHEN Z Y. Rubber fatigue life prediction using a random forest method and nonlinear cumulative fatigue damage model[J]. Journal of Applied Polymer Science, 2020, 137(14):48519.
doi: 10.1002/app.v137.14 URL |
| [19] | 蒙哥马利 D C. 实验设计与分析[M]. 傅钰生, 等, 第6版. 北京: 人民邮电出版社, 2009. |
| MONTGOMERY D C. Design and analysis of experiments[M]. FU Yusheng, et al, 6th ed. Beijing: Posts & Telecom Press, 2009. | |
| [20] |
CHEN Y S. Multiobjective optimization of complex antenna structures using response surface models[J]. International Journal of RF and Microwave Computer-Aided Engineering, 2016, 26(1):62-71.
doi: 10.1002/mmce.20939 URL |
| [21] | 张春宜, 宋鲁凯, 费成巍, 等. 柔性机构动态可靠性分析的先进极值响应面方法[J]. 机械工程学报, 2017, 53(7):47-54. |
| ZHANG Chunyi, SONG Lukai, FEI Chengwei, et al. Advanced extremum response surface method for dynamic reliability analysis on flexible mechanism[J]. Journal of Mechanical Engineering, 2017, 53(7):47-54. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||