

消化道疾病是常见的人体疾病,其中,胃、肠道部位是病变的多发区域,但以导管式内窥镜为代表的传统诊查方法效率过低,且其检查过程存在需要麻醉、易造肠道损伤、患者体验舒适度差等缺点.经过科研人员的不懈努力,胶囊内窥镜等无线缆式诊查设备减轻了患者在检查过程中的痛苦,但仍不是成熟的临床解决方案.近年来,具有主动运动能力的胃肠道诊查机器人逐渐成为该领域下一代技术的研发重点.
然而,随着相关领域研究的深入和临床需求的发展,现有的WPT系统研究成果存在诸多不足,尚未能同时满足以下需求. 一是能量需求,目前的WPT系统主要用于胶囊内窥镜的能量供应,其接收能量通常最多只能达到300 mW[7].二是位置稳定性需求,针对能量发射系统.前期研究成果多为工程验证性质的便携式原型,能量发射线圈尺寸设计在400 mm[8]以内.为尽可能适应患者体型、扩大胃肠道机器人运动范围,应在保证发射磁场强度足够大且均匀的前提下,尽量扩大发射线圈的尺寸.三是姿态稳定性需求,针对能量接收系统.目前研究人员多采用在实心磁芯上绕制三维线圈的方式进行结构设计,然而传统三维实心线圈边长为12~14 mm[9],极大挤占了机器人机械结构、摄像头、相关电路等部件的设计空间.出于缩短机器人轴向长度,减小其体积的目的,本文所述接收线圈需要绕制在空心圆柱形磁芯上,为保证胃肠道机器人在人体内运动的不同姿态下均可满足能量需求,需要对三维接收线圈结构提出新的实用设计.
针对以上实际需求,本文开展了新型WPT系统的研究与实验验证.本文以适应人体生理参数为目标,通过理论计算优化发射线圈、接收线圈的拓扑结构并确定相关参数,最终通过实验平台验证系统设计的可行性.
1 能量传输性能评估及参数选择
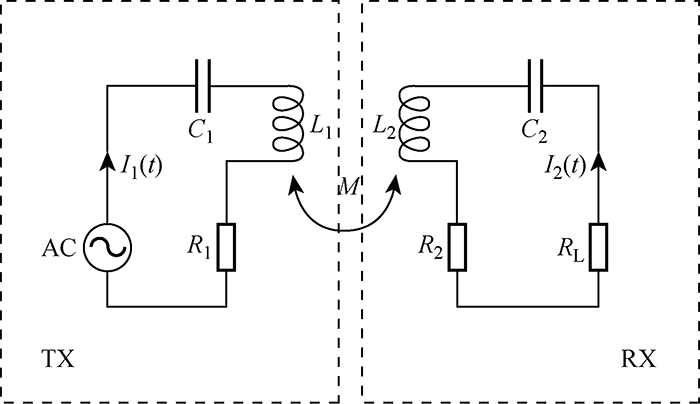
WPT系统简化集总模型如图1所示,其中:C1为补偿电容,用于消除能量发射回路的无功功率;L1为发射回路串联等效电感;R1为发射回路串联等效电阻;C2、L2、R2分别为接收回路的补偿电容、串联等效电感、串联等效电阻;RL为微型机器人工作时的等效负载;M为发射、接收回路之间的互感;I1(t)和I2(t)分别为发射回路和接收回路中的交流电流,随时间t周期性变化;系统分为发射回路TX与接收回路RX两部分;在发射回路中,AC为高频交流电源.为简化分析,将发射线圈复阻抗电路等效为串联等效电感L1与串联等效电阻R1,事实上,复阻抗电路实际包含自感、交流电阻、寄生电容3部分[10].发射回路TX在高频交流信号驱动下产生交变磁场, 接收回路RX通过电磁感应原理获得感应电势,经过整流、稳压等处理后为微型机器人提供能量.
图1
为定量表示两个线圈的耦合程度,定义耦合系数k=M/
式中:Q1、Q2分别为发射回路和接收回路的品质因数,用于表征电路在谐振频率ω0处谐振时电容(或电感)电压与电阻电压之比;α=RL/R2,为电路负载因子.对于一般的RLC串联谐振电路,其品质因数定义为
式中:R、C、L为RLC串联谐振电路中的电阻、电容、电感.
在WPT系统弱耦合状态下,有k≪1,此时(1+α)2≫(1+α)k2Q1Q2,可将式(1)进一步简化:
可见,在发射系统功率一定的情况下,应尽量提高发射回路与接收回路的品质因数,以优化传输效率、保证接收系统有足够能量供给.
2 能量发射线圈优化设计
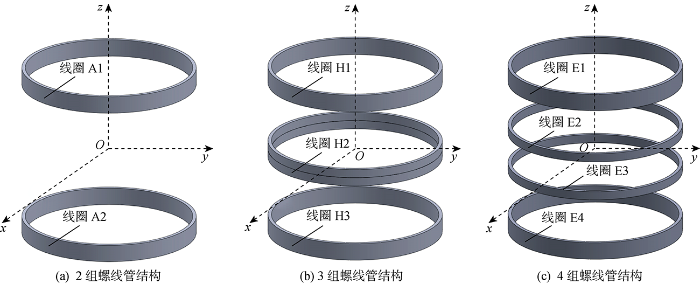
出于提高能量传输系统稳定性考虑,发射系统应当在胃肠道机器人运动范围内产生尽可能均匀的交变磁场,其中,发射线圈的拓扑结构是决定发射系统所产生的磁场分布的关键因素.目前,研究人员对亥姆霍兹线圈和多组、多层螺线管线圈等线圈结构类型所产生的磁场进行了分析探索,有研究认为[9]亥姆霍兹线圈将在一定范围内产生类似球形的均匀交变磁场,但磁场强度较弱;螺线管线圈产生的类圆柱形磁场强度较大,但均匀性较差.本文总结以上研究成果,提出了一种新型组合式螺线管线圈,该线圈由多组螺线管按一定距离轴向排列而成,其中,每组螺线管由不同匝数的线圈构成,从而在满足磁场强度要求的基础上提高发射磁场的均匀性.
图2
2.1 z轴轴线上发射线圈磁场的分布与优化
基于对称性考虑,对单组通电螺线管在xOz平面上产生的磁场进行分析.
假设单位长度的螺线管由n匝线圈组成,在长度为l的螺线管中处取一电流元dl,电流元与坐标为(x, z)的W点的距离d为[15]
式中:θ为方位角;D为螺线管直径.由式(4)可知,此时距离d是关于长度l、方位角θ以及坐标x和z的函数.则电流元在W点产生的磁感应强度dB在x和z两个方向的分量为
dBx=
式中:μ0为真空磁导率.对于式(4),令x=0,得到电流元与z轴轴线上W点的投影点(0, z)的距离为
图3
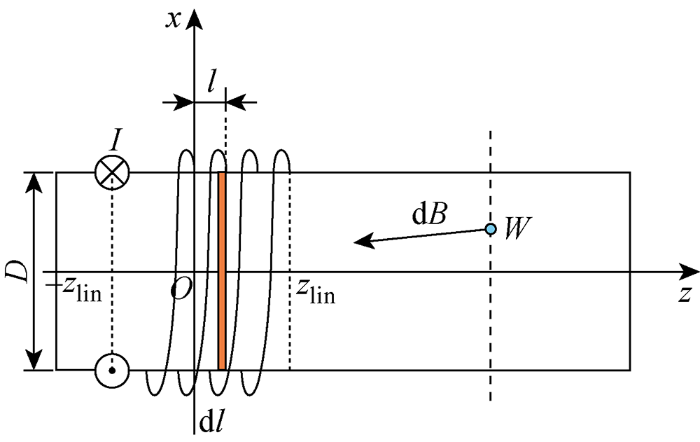
图4

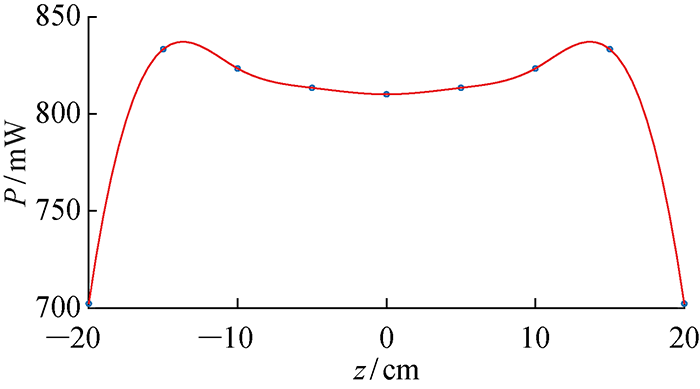
图4
发射线圈磁场在z轴上的分布
Fig.4
Distributions of magnetic field of transmitting coils on z-axis
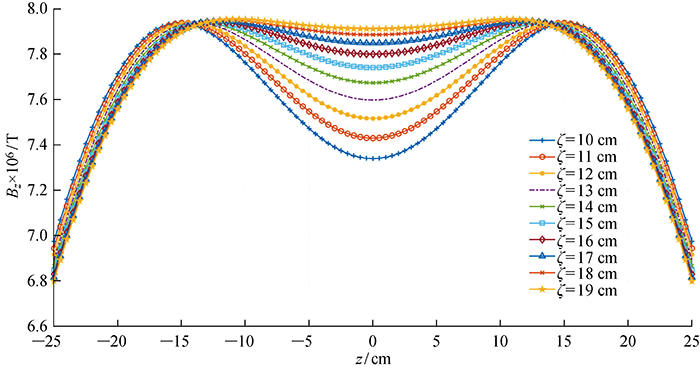
由图4(d)可知,在z坐标取值为 -25~25 cm的发射线圈内部,4组螺线管发射线圈(见图2(c))产生的磁场在z轴轴线上的分布更加均匀,该拓扑结构更适合选用为新型发射线圈结构.此外4组螺线管结构中,轴向为50 cm尺寸限制范围内,z轴方向上,考虑到螺线管均有一定宽度,则螺线管线圈E1与线圈E4最大中心间距实际取为42 cm.本文为进一步优化4组螺线管位置分布,固定螺线管线圈E1与线圈E4中心间距为42 cm,对称移动线圈E2与线圈E3的位置.当线圈E1与线圈E2取不同中心间距ζ(ζ<19 cm)时,其轴线上磁场分量Bz分布如图5所示.由图5可知,最终取相邻两线圈中心相距11 cm作为最优尺寸.
图5
2.2 3种线圈产生磁场在xOz平面上的分布与优化
在3种发射线圈结构中,每组线圈半径r=25 cm,线圈轴向间距小于50 cm,所有线圈等距分布,激励电流取I=1 A/匝.
图6
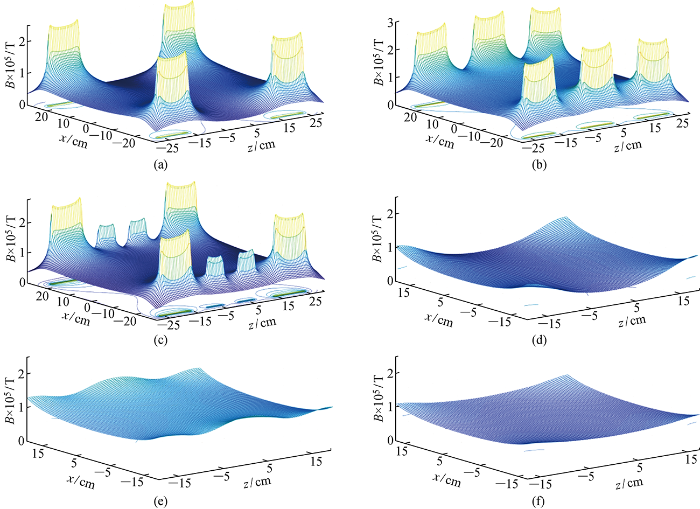
图6
3种发射线圈产生的磁场分布
Fig.6
Distribution of magnetic field generated by three transmitting coils
表1 3种发射线圈磁场均匀性指标
Tab.1
| 发射线圈结构 | δ×106/T | cv/% | |
|---|---|---|---|
| 2组螺线管线圈 | 6.17 | 1.40 | 22.69 |
| 3组螺线管线圈 | 10.99 | 1.96 | 17.83 |
| 4组螺线管线圈 | 8.51 | 1.08 | 12.69 |
其中,变异系数是概率分布离散程度的一个归一化量度,其定义为标准差δ与平均值μ之比,则有:
显然,综合3种均匀性指标判断, 由4组螺线管组成的拓扑结构产生的磁场具有最佳均匀性.在实际工程应用中,该拓扑结构由4组同轴排列的螺线管间隔一定距离组合而成,其中,每组螺线管由不同匝数的利兹线密绕制得.由2.1节可知,每组螺线管之间的相对距离也会对发射线圈产生磁场的均匀性造成影响.
3 能量接收线圈优化设计
传统的微型机器人需要在其头部或尾部为接收线圈预留单独的安置空间,不可避免地增加了机器人的总长度.为节省空间,本文采用的接收线圈需要绕制在空心圆柱型磁芯侧壁,其空心部分内部可安置机器人机械结构.采用的接收线圈具有纺锤形绕制的线圈结构, 该接收线圈具有在空间三维方向接收电磁能量的能力.
图7
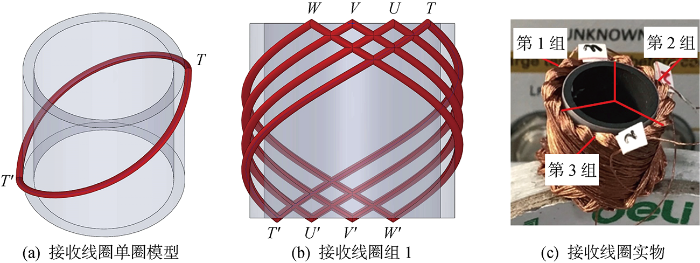
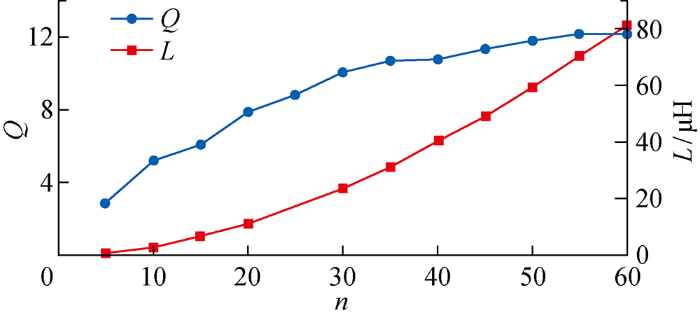
由前文分析得知,接收线圈的品质因数Q是表征其能量接收能力的关键因素,在利兹线规格确定的情况下,本文测定接收线圈Q、L等参数与线圈匝数的关系如图8所示.在一定范围内,Q与绕制匝数正相关,结合机器人结构限制,本文确定每组线圈由利兹线绕制60匝而成,其中每匝利兹线由18股线径AWG44的单股漆包线绞合650次得到.
图8
4 实验结果分析
4.1 实验装置
综合前文分析,本课题组制作了无线能量传输系统,其实物图如图9所示.选定300股规格AWG44利兹线绞合绕制发射线圈,采用了方形线框构型,正方体骨架尺寸为50 cm×50 cm×50 cm, 4个线圈的具体匝数为22、11、11、22匝,各线圈中心间距数据分别为15、12、15 cm,将发射线圈与CKTB1000可调真空电容串联,使回路在220 kHz激励作用下谐振.
图9
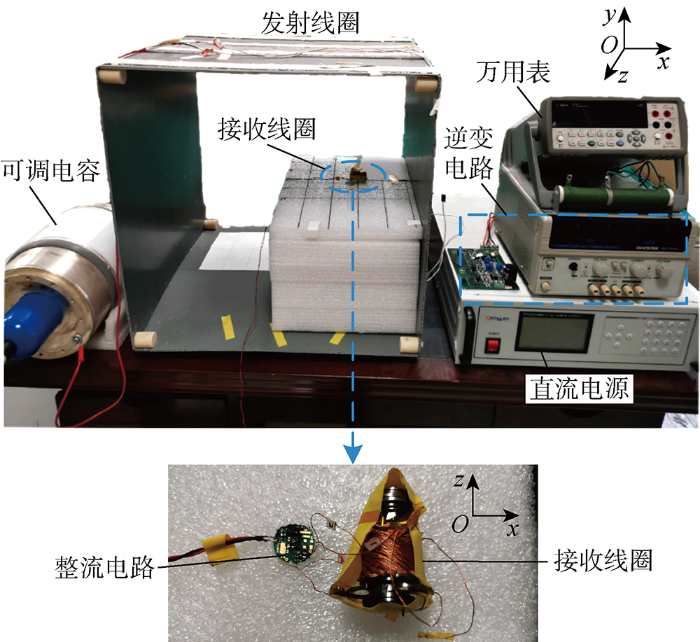
同时,接收线圈采用图7确定的纺锤形绕制方式缠绕在空心磁芯上,然后将接收系统与机器人装配固定,最后通过向接收线圈串联贴片电容的方式使接收系统电路在220 kHz谐振,经后续整流电路处理后输出电压到滑动变阻器模拟的机器人工作等效电阻.
使用型号为E4990A的阻抗分析仪测得发射线圈及接收线圈相关参数如表2所示.由于采用了先串联后并联的方式,发射线圈等效电阻较小,从而获得了较大的品质因数,即对激励电流有比较大的放大能力.3组接收线圈均为75匝,受绕制位置及手工制作因素影响,品质因数并非完全一致.
表2 发射线圈及接收线圈相关参数
Tab.2
| 线圈类型 | 匝数 | 等效串联电阻/Ω | 电感/μH | Q |
|---|---|---|---|---|
| 发射线圈 | 66 | 1.07 | 568.7 | 731 |
| 接收线圈组1 | 75 | 4.97 | 241.1 | 67.5 |
| 接收线圈组2 | 75 | 6.29 | 269 | 61.1 |
| 接收线圈组3 | 75 | 5.67 | 277.5 | 70.2 |
图9中,直流电源经驱动电路逆变为220 kHz交流方波以提供激励,此时发射线圈谐振回路产生大致均匀的交变磁场.位于发射线圈腔体内部的接收线圈在电磁感应的作用下产生交流电压,经后续整流电路转换为直流电压,为用30 Ω滑动变阻器模拟的机器人工作等效电阻供电,使用高精度数字万用表测量滑动变阻器两端的接收电压,并换算为接收功率.
4.2 能量传输位置稳定性分析
图10
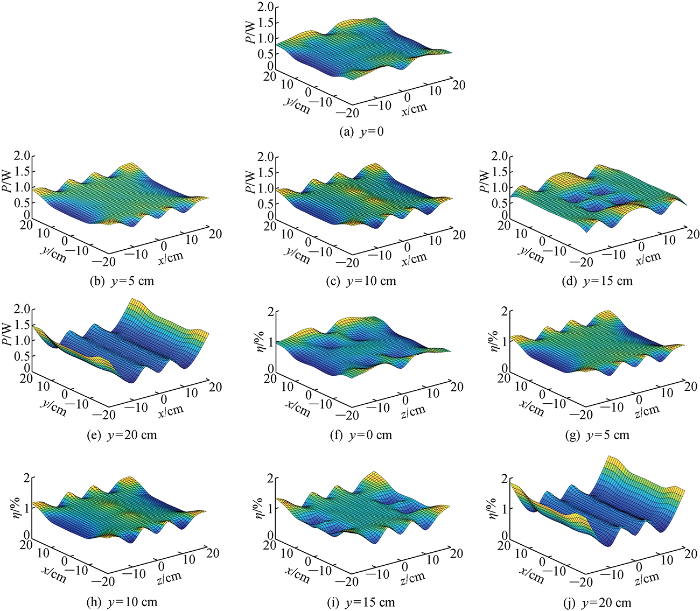
图10
不同高度平面上的接收功率与接收效率
Fig.10
Reception efficiency on planes at different heights
表3 不同平面采样数据标准差统计
Tab.3
| y/cm | 标准差 | |
|---|---|---|
| 接收功率/mW | 接收效率/% | |
| 0 | 85.16 | 0.1094 |
| 5 | 75.40 | 0.0957 |
| 10 | 80.70 | 0.1000 |
| 15 | 97.82 | 0.1297 |
| 20 | 244.05 | 0.3087 |
图11
4.3 能量传输姿态稳定性分析
图12
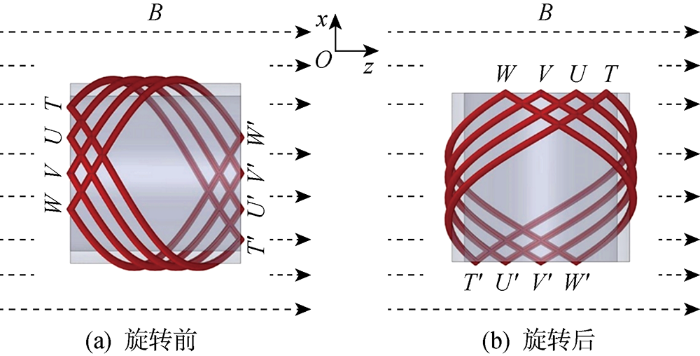
图13
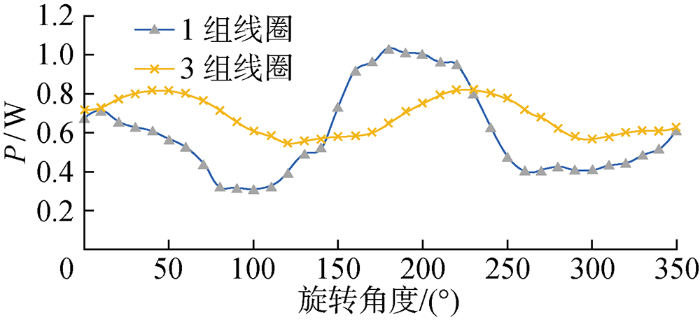
图13
接收线圈绕y轴转动时接收功率的变化
Fig.13
Changes of received power when receiving coil rotates around y-axis
图14
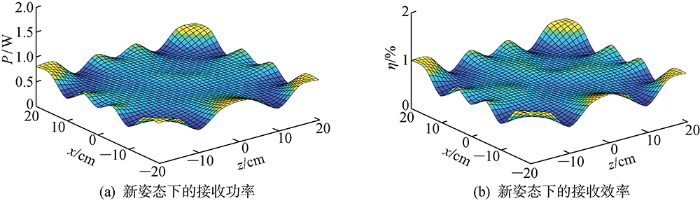
图14
新姿态下机器人的接收功率和接收效率
Fig.14
Receiving power and receiving efficiency of robot in new posture
5 结语
本文研究了一种针对微型胃肠道机器人的新型无线供能系统,探索了发射线圈拓扑结构对发射系统产生的交变磁场的均匀性影响,并依据理论分析与实验结果确定系统采用4组螺线管线圈产生交变磁场.在y=0平面上,磁场强度标准差为1.08×10-6 T,接收功率标准差为85.16 mW,发射磁场较为稳定、均匀.采用利兹线制作接收线圈,将其绕制在圆柱体中空磁芯上,并完成机器人装配,在不同姿态下测试机器人接收功率,均能满足500 mW的最低工作功率需求.
本系统采用50 cm×50 cm×50 cm的发射系统框架与外径为⌀13.9 mm×11.9 mm的接收线圈,通过电磁耦合方式实现了新型胃肠道机器人WPT系统,该新型系统能满足肠道机器人工作能耗、姿态稳定性、供能稳定性、尺寸设计等要求.与先前的研究成果相比,该系统在发射线圈尺寸更大的基础上产生了更为均匀的磁场,减少了电磁辐射的风险.通过改进接收线圈结构显著提高了机器人的空间利用率,为机器人下一步的活检、定点释放靶向药物等技术升级奠定了基础.本文研究的新型WPT系统帮助胃肠道机器人进一步满足了临床检查需求,后续将开展动物实验及人体实验,以不断推进胃肠道微型机器人技术的发展和进步.
参考文献
Equivalent circuit modeling of a multilayer planar winding array structure for use in a universal contactless battery charging platform
[J].DOI:10.1109/TPEL.2006.886655 URL [本文引用: 1]
Modelling and analysis of high frequency resonant inductive power transfer for electric vehicle charging system
[C]//
Development of a capsule robot for exploring the colon
[J].DOI:10.3390/mi10070456 URL [本文引用: 1]
微型肠道机器人扩张机构与能量接收线圈的设计与实验
[J].
Design and experiment of expanding mechanism and power receiving coil for micro intestinal robot
[J].
肠道机器人三维接收线圈的设计与优化
[J].
Design and optimization of three-dimensional receiving coils for intestinal robots
[J].
An improved wearable resonant wireless power transfer system for biomedical capsule endoscope
[J].DOI:10.1109/TIE.2018.2801781 URL [本文引用: 1]
视频胶囊内窥镜无线能量接收系统的设计
[J].
Design of wireless power receiving system for video capsule endoscope
[J].
胶囊内窥镜便携式无线能量发射系统
[J].
Portable wireless power transmitting system for video capsule endoscopes
[J].DOI:10.3788/OPE.20142201.0132 URL [本文引用: 2]
肠道机器人无线能量发射系统优化设计
[J].
Optimal design of wireless power transfer system for gastrointestinal robots
[J].
A novel power supply system for puborectalis-like artificial anal sphincter
[J].DOI:10.1111/aor.13422 URL [本文引用: 1]
一种正方形亥姆霍兹线圈的设计
[J].
A design of a square Helmholtz coil
[J].
通电螺线管磁场的双重数值积分法和可视化
[J].
Calculating the magnetic filed of current solenoid according to a double numerical integral and its visualization
[J].
A capsule robot powered by wireless power transmission: Design of its receiving coil
[J].DOI:10.1016/j.sna.2015.08.021 URL [本文引用: 1]
Simplified design method for litz wire
[C]//
用于胃肠道微型机器人的组合螺线管式无线能量发射系统研究
[J].
Research on combined solenoid wireless power transmitting system for gastrointestinal micro-robot
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}