上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (8): 1009-1017.doi: 10.16183/j.cnki.jsjtu.2019.261
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
任书锋a, 杨丹a, 余海东a( ), 王皓a,b
), 王皓a,b
收稿日期:2019-09-15
出版日期:2021-08-28
发布日期:2021-08-31
通讯作者:
余海东
E-mail:hdyu@sjtu.edu.cn
作者简介:任书锋(1995-),男,山西省孝义市人,硕士生,从事机器人运动规划的研究
基金资助:
REN Shufenga, YANG Dana, YU Haidonga(), Wang Haoa,b
Received:2019-09-15
Online:2021-08-28
Published:2021-08-31
Contact:
YU Haidong
E-mail:hdyu@sjtu.edu.cn
摘要:
空间两刚体间的滚动约束系统是一种典型的非完整系统,非完整的特性可以用于简化机械结构,提高系统可靠性.针对纯滚动约束非完整系统的状态变量之间相互耦合难以控制、已有的控制方法局限于特定的模型且缺少对在线控制研究等问题,建立了适用于一般滚动约束系统在线运动规划的求解方法.该方法基于滚动约束一阶运动模型,首先通过配点法实现离线运动规划获得参考轨迹,然后在实时控制中结合滚动优化框架运用最优动作控制(SAC)算法,实现滚动系统的在线运动规划.将算法运用于球-平面滚动模型和两个球体间滚动模型的实时运动规划,仿真结果表明该方法在拓宽球形机器人控制和灵巧机械手操作方面具有实际应用价值.
中图分类号:
任书锋, 杨丹, 余海东, 王皓. 空间两刚体滚动约束系统在线运动规划[J]. 上海交通大学学报, 2021, 55(8): 1009-1017.
REN Shufeng, YANG Dan, YU Haidong, Wang Hao. Online Motion Planning for Two Space Rigid Bodies with Rolling Constraints[J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 1009-1017.
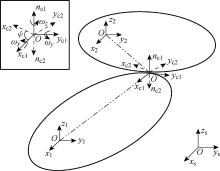
图1
接触模型坐标系
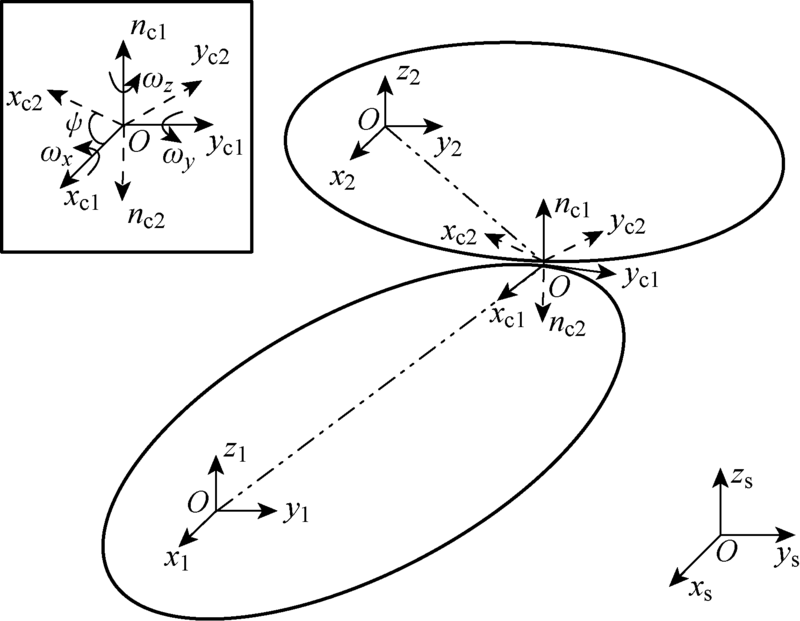
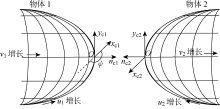
图2
空间刚体滚动接触运动模型
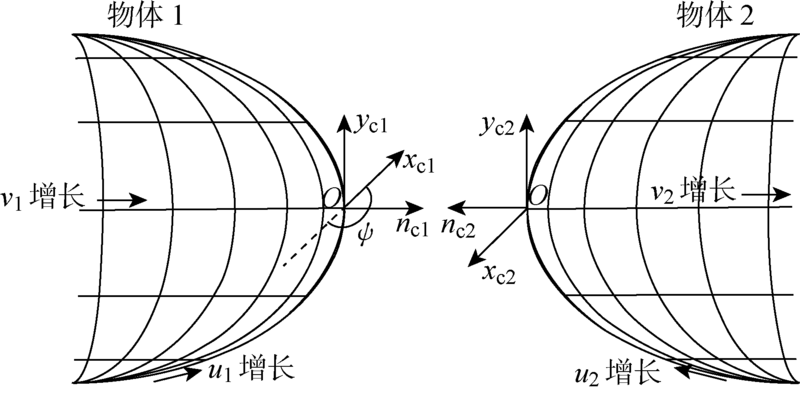

图3
在线控制算法框图
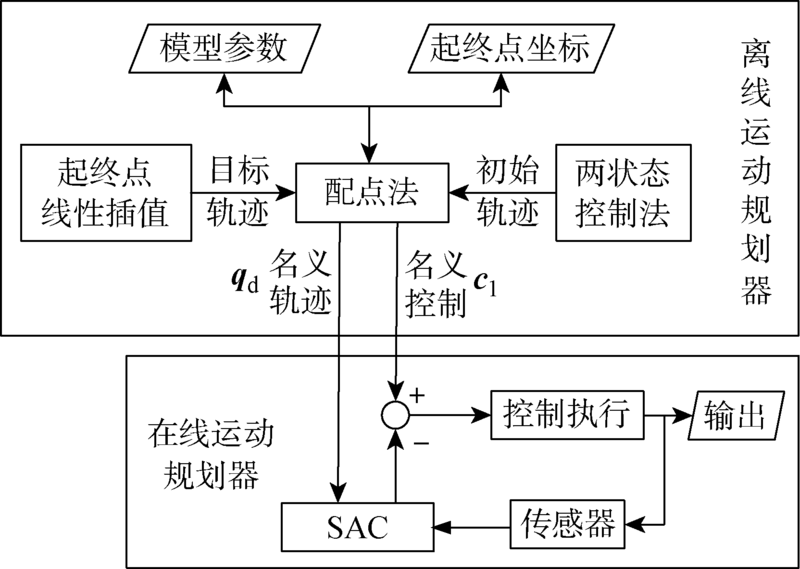
表1
滚动接触模型离线运动规划参数
| 参数名 | 参数值 |
|---|---|
| 配点数 | 41 |
| 控制变量约束 | |
| Q | diag([100 100 10 10 1]) |
| R | diag([0.1 0.1]) |
| P1 | diag([20 20 10 10 1]) |
表2
滚动接触模型在线运动规划参数
| 参数名 | 参数值 |
|---|---|
| 传感器采样频率 | fs=50 Hz,ts=0.02 s |
| 预测区间/控制时长初值 | Tp=0.5 s,Δtinit=0.1 |
| 目标函数下降上限系数 | γ=-5 |
| 线搜索参数 | ω=0.55,kmax=6 |
| Q | diag([1000 1000 50 50 1]) |
| R | diag([0.1 0.1]) |

图4
球-平面滚动接触运动规划结果
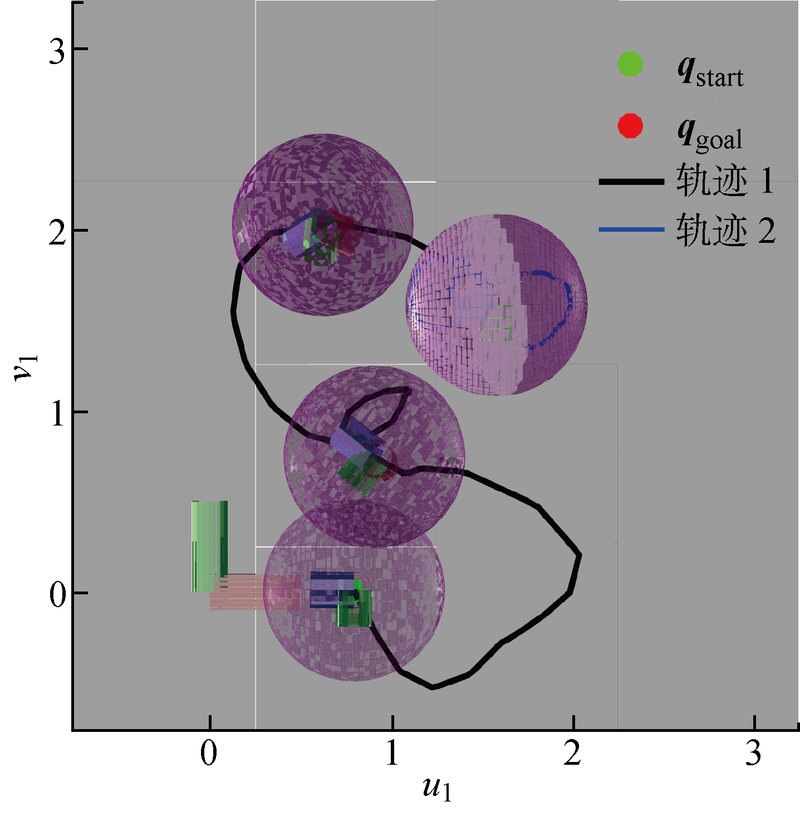
图5
球-平面模型优化控制输入和状态空间曲线
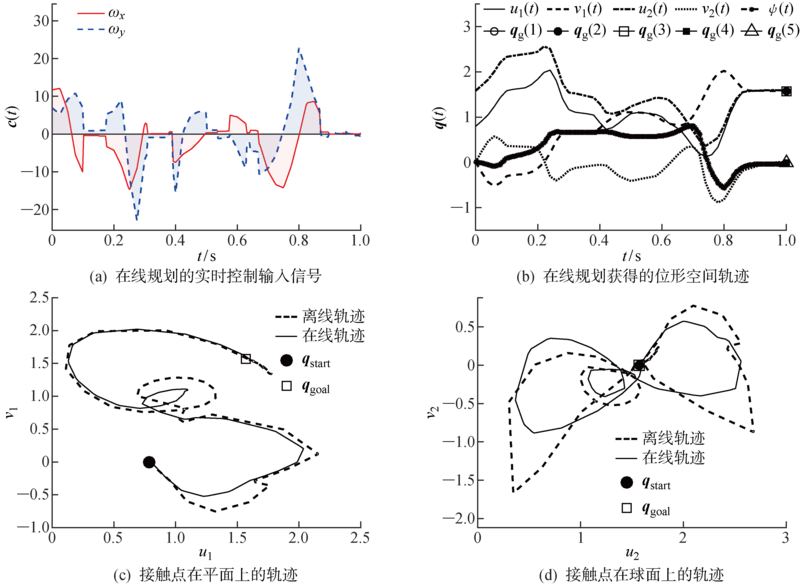

图6
球-平面模型计算时间曲线
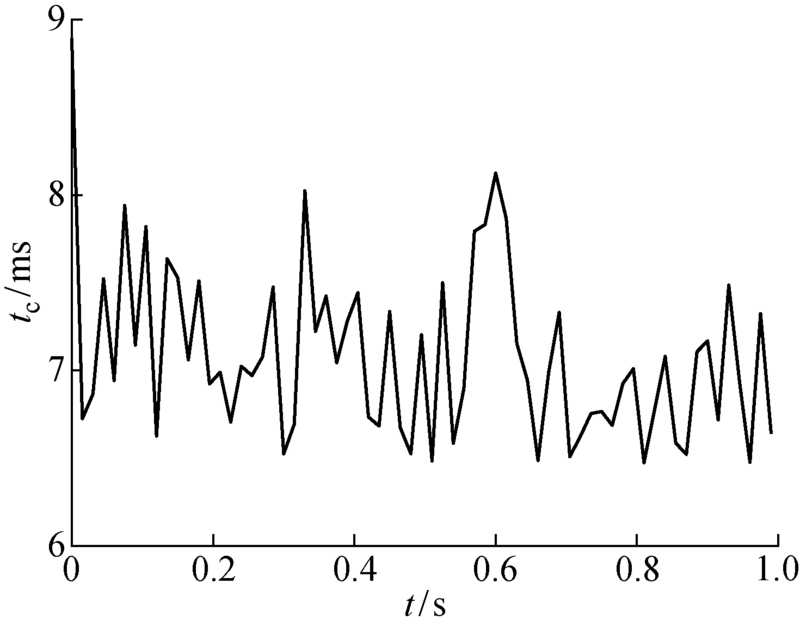
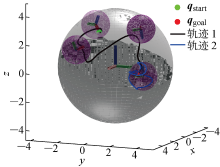
图7
球-球滚动接触仿运动规划结果
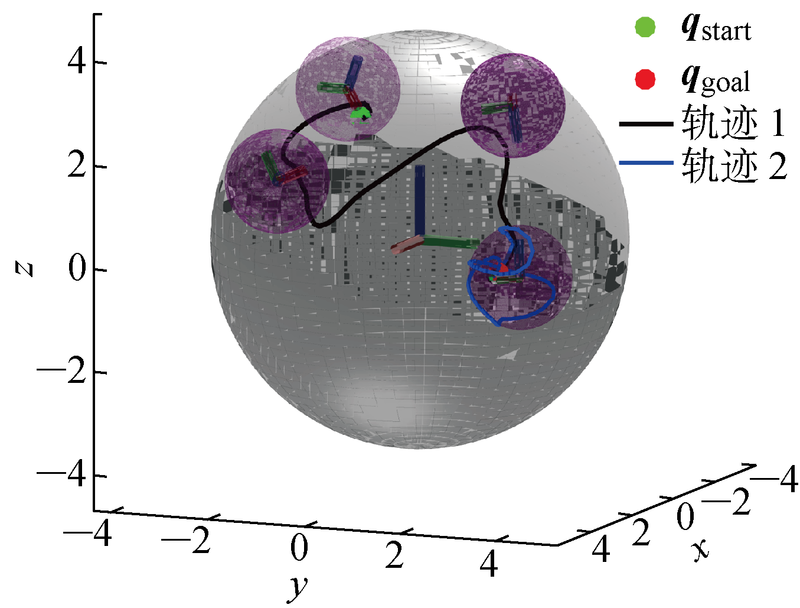
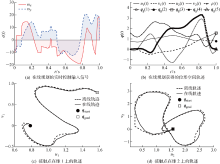
图8
球-球模型优化控制输入和状态空间曲线
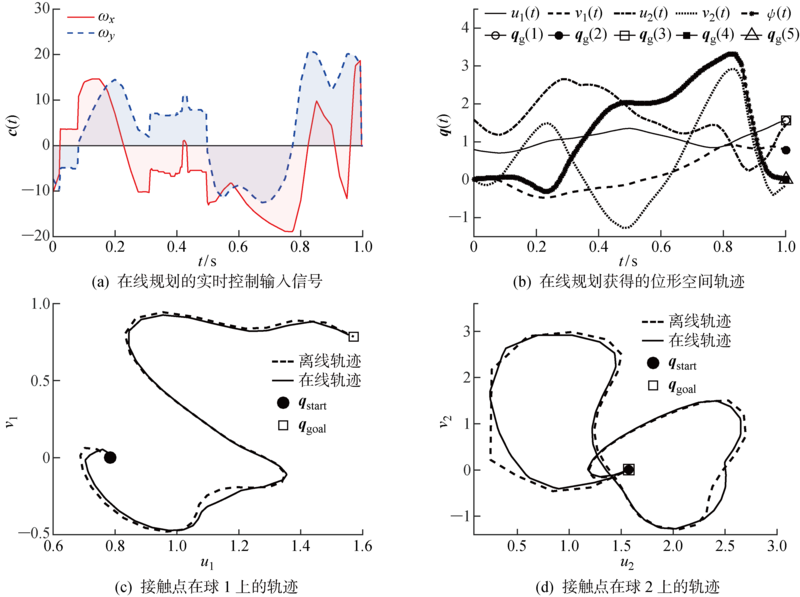
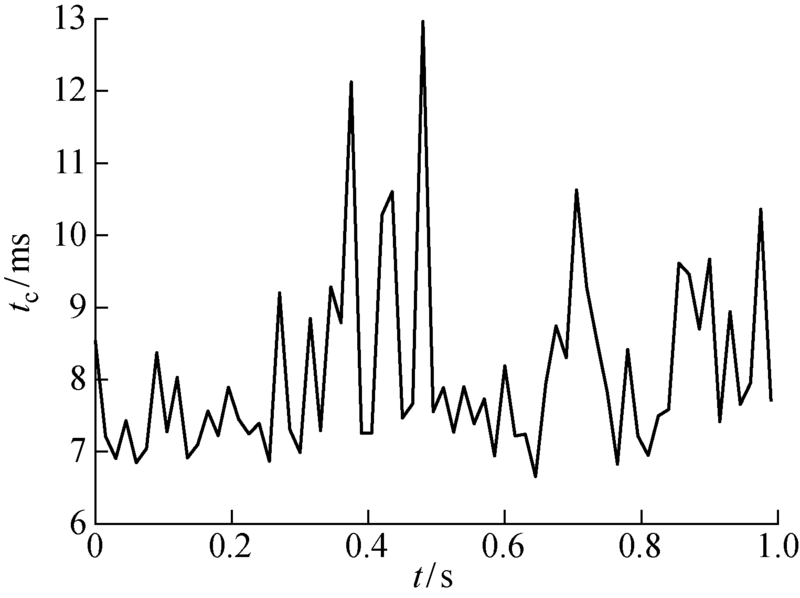
图9
球-球模型计算时间曲线
| [1] | 徐娜, 陈雄, 孔庆生, 等. 非完整约束下的机器人运动规划算法[J]. 机器人, 2011, 33(6):666-672. |
| XU Na, CHEN Xiong, KONG Qingsheng, et al. Motion planning for robot with nonholonomic constraints[J]. Robot, 2011, 33(6):666-672. | |
| [2] | MURRAY R M, LI Z X, SASTRY S S. A mathematical introduction to robotic manipulation[M]. California: CRC Press, 2017. |
| [3] | 彭坤, 彭睿, 黄震, 等. 求解最优月球软着陆轨道的隐式打靶法[J]. 航空学报, 2019, 40(7):159-167. |
| PENG Kun, PENG Rui, HUANG Zhen, et al. Implicit shooting method to solve optimal Lunar soft landing trajectory[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(7):159-167. | |
| [4] | 周誌元, 谭天乐. 小行星探测器轨迹优化方法[J]. 上海航天, 2014, 31(2):57-64. |
| ZHOU Zhiyuan, TAN Tianle. Optimization for asteroids spacecraft trajectory[J]. Aerospace Shanghai, 2014, 31(2):57-64. | |
| [5] |
YANG C G, LI Z J, LI J. Trajectory planning and optimized adaptive control for a class of wheeled inverted pendulum vehicle models[J]. IEEE Transactions on Cybernetics, 2013, 43(1):24-36.
doi: 10.1109/TSMCB.2012.2198813 URL |
| [6] |
ANSARI A R, MURPHEY T D. Sequential action control: Closed-form optimal control for nonlinear and nonsmooth systems[J]. IEEE Transactions on Robotics, 2016, 32(5):1196-1214.
doi: 10.1109/TRO.2016.2596768 URL |
| [7] | 杜明博, 梅涛, 陈佳佳, 等. 复杂环境下基于RRT的智能车辆运动规划算法[J]. 机器人, 2015, 37(4):443-450. |
| DU Mingbo, MEI Tao, CHEN Jiajia, et al. RRT-based motion planning algorithm for intelligent vehicle in complex environments[J]. Robot, 2015, 37(4):443-450. | |
| [8] | PALMIERI L, ARRAS K O. A novel RRT extend function for efficient and smooth mobile robot motion planning[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2014: 205-211. |
| [9] |
ORIOLO G, VENDITTELLI M. A framework for the stabilization of general nonholonomic systems with an application to the plate-ball mechanism[J]. IEEE Transactions on Robotics, 2005, 21(2):162-175.
doi: 10.1109/TRO.2004.839231 URL |
| [10] |
LI Z, CANNY J. Motion of two rigid bodies with rolling constraint[J]. IEEE Transactions on Robotics and Automation, 1990, 6(1):62-72.
doi: 10.1109/70.88118 URL |
| [11] |
ALOUGES F, CHITOUR Y, LONG R X. A motion-planning algorithm for the rolling-body problem[J]. IEEE Transactions on Robotics, 2010, 26(5):827-836.
doi: 10.1109/TRO.2010.2053733 URL |
| [12] | 赵振, 刘才山, 鲁建东. 空间物体点接触纯滚动的几何意义[J]. 北京大学学报(自然科学版), 2016, 52(4):713-716. |
| ZHAO Zhen, LIU Caishan, LU Jiandong. On nonholonomic constraints about the pure rolling of point contact[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2016, 52(4):713-716. | |
| [13] |
REHAN M, REYHANOGLU M. Global formulation and motion planning for a sphere rolling on a smooth surface[J]. International Journal of Control, Automation and Systems, 2018, 16(6):2709-2717.
doi: 10.1007/s12555-018-0011-3 URL |
| [14] |
JURDJEVIC V, ZIMMERMAN J. Rolling sphere problems on spaces of constant curvature[J]. Mathematical Proceedings of the Cambridge Philosophical Society, 2008, 144(3):729-747.
doi: 10.1017/S0305004108001084 URL |
| [15] |
ZIMMERMAN J A. Optimal control of the sphere S n rolling on En[J]. Mathematics of Control, Signals and Systems, 2005, 17(1):14-37.
doi: 10.1007/s00498-004-0143-2 URL |
| [16] |
MONTANA D J. The kinematics of contact and grasp[J]. The International Journal of Robotics Research, 1988, 7(3):17-32.
doi: 10.1177/027836498800700302 URL |
| [17] | AGRACHEV A A, SACHKOV Y L. Control theory from the geometric viewpoint[M]. Berlin, Heidelberg: Springer Berlin Heidelberg, 2004. |
| [1] | 吴长征1,岳义1,2,韦宝琛1,刘殿富3. 双臂机器人自碰撞检测及其运动规划[J]. 上海交通大学学报(自然版), 2018, 52(1): 45-53. |
| [2] | 许波,闵华清,肖芳雄. 蚁群算法求解离散最小约束去除问题[J]. 上海交通大学学报(自然版), 2015, 49(03): 383-386. |
| [3] | 张立强1,王宇晗2. 基于分层递阶模型的多轴加工过程分析与运动度量规划[J]. 上海交通大学学报(自然版), 2011, 45(11): 1715-1719. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 422
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 781
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||