

水轮机尾水管内气液两相流动的实验测量,主要包括气相涡带形态和液相速度两方面.气相涡带形态多通过高速摄像获取,通过Nicolet记录水轮机不同操作点下螺旋涡带的形态,并指出在特定操作点下涡带的横截面为椭圆且自旋转[5].Skripkin等[6]观察到了水轮机尾水管内单螺旋和双螺旋涡带间的不稳定循环演化;Alekseenko等[7]观察到了尾水管内的涡核重连现象,单螺旋涡带重连后形成涡环.受气液界面强反光等因素影响,当前研究直接利用高速摄像难以获得清晰的涡带发展演化界面.尾水管内液相速度多采用非侵入式技术测量,如激光多普勒测速仪(Laser Doppler Velocimetry,LDV)和粒子图像测速(Particle Image Velocimetry,PIV)等,其中PIV能够提供整个区域的详细流场,因而应用最多[8].Lai等[9]利用2D LDV获得尾水管内特定点的瞬时二维速度,Goyal等[10]利用2D PIV得到尾水管中心纵截面的二维速度场,Tridon等[11]利用3D PIV得到了尾水管内的三维速度场.上述研究中尾水管内液相速度场的测量数据较为丰富,而对于尾水管内的气液两相流动,液相速度场与气相涡带的形态密切相关,二者的同步测量十分必要.
2008年,Iliescu等[12]进行了尾水管内涡带形态和速度场的同步测量,将两台照相机分别用于同一方向上的高速摄像和PIV拍摄,并通过图像处理获得涡带直径及涡带穿过速度测量平面的位置.该研究假设螺旋涡带的形状和角速度及相应流场在一个周期内保持恒定,将一个方向不同时刻的二维数据对应于空间角位置,重建空间速度场和涡带的三维形态.但一个周期内涡带形状不变且固定角速度旋转的假设会影响涡带3D重建的准确性.
在现有的水轮机尾水管内气液两相流动测量研究中,涡带形态或液相速度场的单一测量较丰富,但二者的同步测量较少.通过简化的实验台模拟不同工况下水轮机尾水管内的旋流结构,结合粒子图像测速和脉冲阴影(Pulsed Shadowgraphy,PS)技术提出全新的测量方案,应用于尾水管涡带流动,同时获得液相速度场和两个垂直方向的清晰涡带界面.分析不同涡带形态的演化过程,并对单螺旋涡带进行三维重建,进一步分析单螺旋涡带的三维形态和旋转进动过程.最后,对尾水管呈现单螺旋涡带时的液相速度场进行分析,并将液相速度场与涡带的三维形态进行空间关联分析.获取的实验数据为涡带生成和发展机理研究提供了基础数据,可用于尾水管内旋流的数值计算模型和涡识别方法的验证.
1 实验装置和测量技术
1.1 实验装置
图1
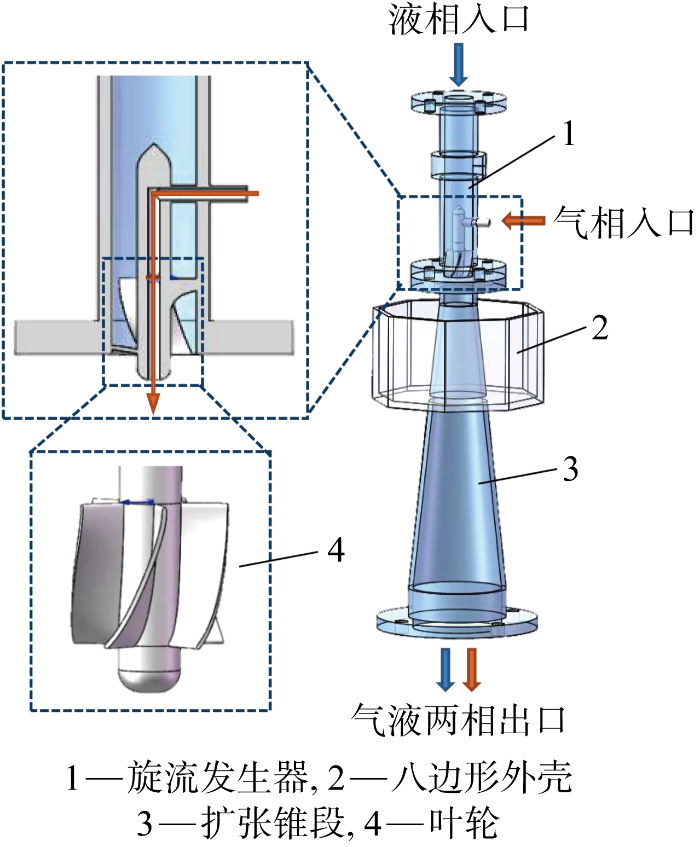
图2
采用叶片式旋流发生器来实现旋流结构,几何旋流数S=0.74,计算如下
式中: R为轮缘半径; Rh为轮毂半径; α为叶片出口角.
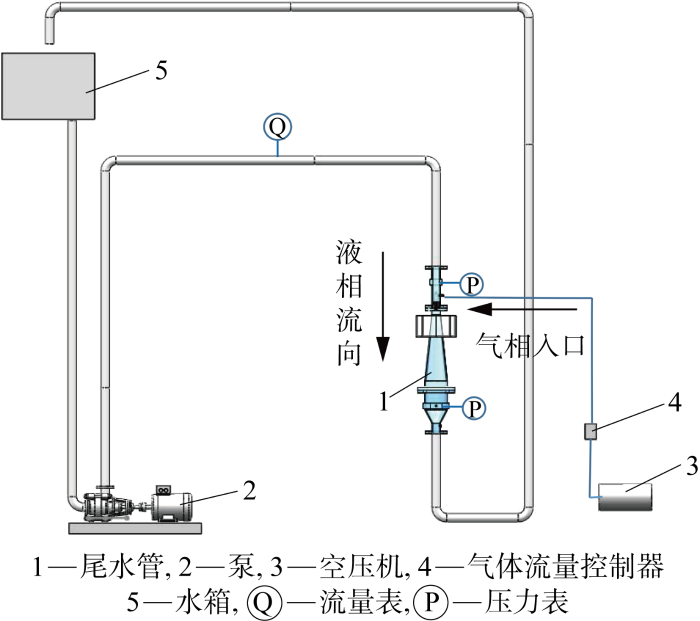
式中:Qg为气相体积流量;Ql为液相体积流量.
表1 实验工况
Tab.1
| 序号 | Ql×103/ (m3·s-1) | Qg/(m3·s-1) | Re×10-5 | β/% |
|---|---|---|---|---|
| 1 | 2.01 | 3.33×10-6 | 0.57 | 0.17 |
| 2 | 2.01 | 6.66×10-6 | 0.57 | 0.33 |
| 3 | 2.91 | 3.33×10-6 | 0.82 | 0.11 |
| 4 | 2.91 | 6.66×10-6 | 0.82 | 0.23 |
| 5 | 2.91 | 1.00×10-5 | 0.82 | 0.34 |
| 6 | 2.91 | 1.33×10-5 | 0.82 | 0.46 |
| 7 | 2.91 | 1.66×10-5 | 0.82 | 0.57 |
| 8 | 3.52 | 6.66×10-6 | 1.00 | 0.19 |
| 9 | 3.52 | 1.00×10-5 | 1.00 | 0.28 |
| 10 | 4.31 | 6.66×10-6 | 1.23 | 0.15 |
| 11 | 4.31 | 1.00×10-5 | 1.23 | 0.23 |
| 12 | 4.98 | 1.00×10-5 | 1.41 | 0.20 |
1.2 测量技术
PIV是一种非侵入的流体测速方法,其原理是利用具有高流动跟随性的示踪粒子的运动状态来反映流场的运动状态,通过测量极短时间内示踪粒子的位移,间接测量流场的瞬时速度.脉冲阴影使用背部照明光源,不与气液界面交互的光产生均匀明亮的背景,而在界面处折射的光被分散形成阴影,从而获得清晰的界面形态.本文中尾水管内气液两相流动的测量结合了PIV和脉冲阴影技术,同时获得液相速度场和两个垂直方向的涡带形态.
图3
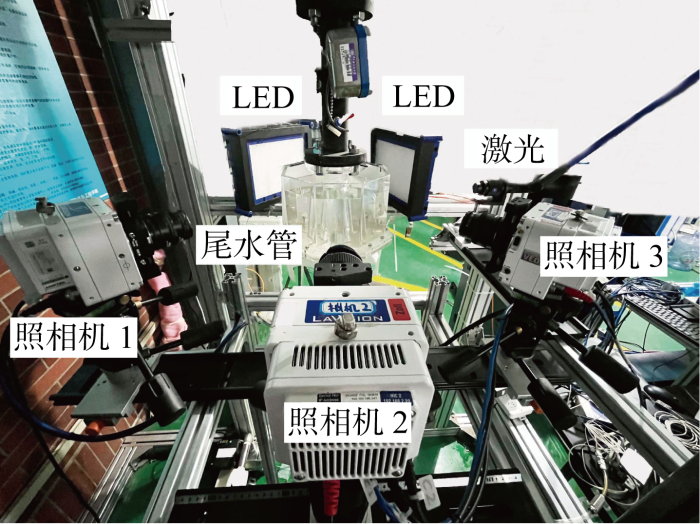
图4
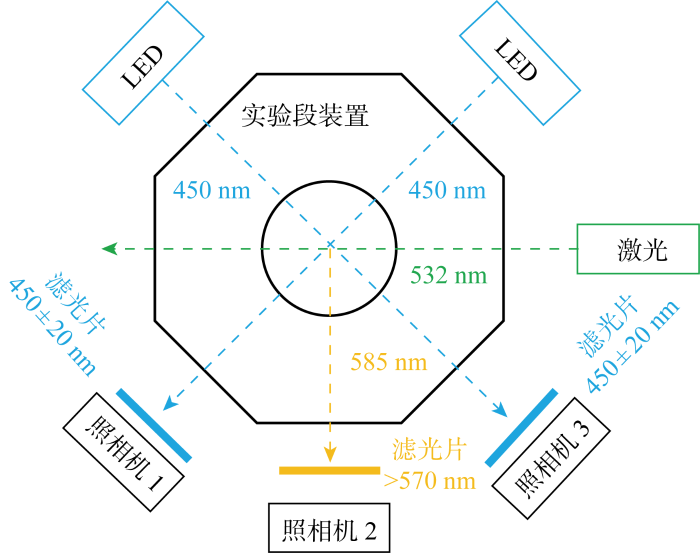
实验回路中注入涂有罗丹明B的球形空心玻璃珠作为示踪粒子,该颗粒粒径为1~20 μm,密度为1.5 g/cm3.当波长为532 nm的绿色片激光照亮流场时,荧光颗粒会发射出峰值波长为585 nm的黄色荧光.两个蓝色LED发出波长为450 nm的蓝光,作为脉冲阴影成像系统的背光光源.3台照相机装有滤光片,其中照相机2安装570 nm的高通滤光片,允许黄色荧光通过;照相机1和照相机3安装了(450±20) nm 的带通滤光片,允许蓝光通过.光源和照相机的开关由同步器控制.因此,照相机2可以捕获到 PIV计算所需要的荧光粒子信息, 照相机1和照相机3可以利用脉冲阴影技术得到两个垂直方向的涡带形态,如图5所示,其中图5(a)为照相机1涡带,图5(b)为照相机2荧光粒子,图5(c)为照相机3涡带.
图5

2 数据处理方法
2.1 涡带形态3D重建
涡带的三维重建算法的基本思路是基于图像处理识别和提取涡带边缘信息,计算得到涡带的空间位置和直径,进而实现单螺旋涡带的三维重建.关注重点为螺旋涡带的整体形态和演化特征,因此不对涡带表面细节做过多讨论,可参考文献[12]中的研究,假设重建区域内涡带不同高度的横截面均为圆形且等直径.
图6
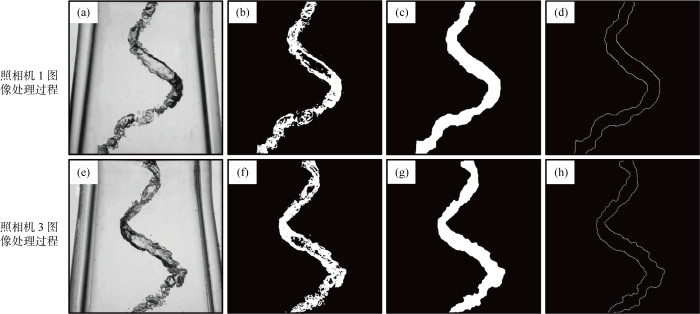
图7
重建半径取平均值为
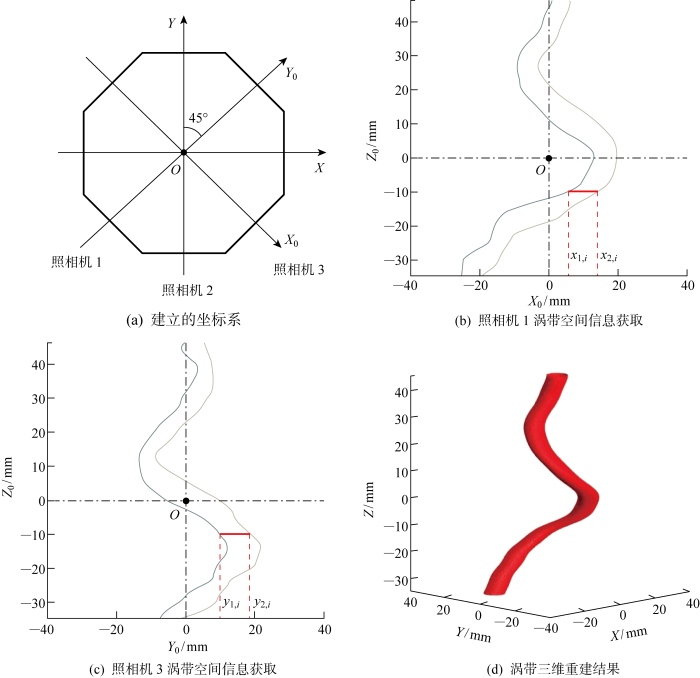
将OX0Y0Z0坐标系下的圆心坐标(a0,i, b0,i)转换为OXYZ坐标系下的圆心坐标(ai, bi):
式中:ϑ为一转换角度,当a0,i<0时,ϑ=+135°;当a0,i>0时,ϑ=-45°.
最后,在OXYZ坐标系下,将i=1, 2, …, 400时的涡带横截面信息映射到Z轴高度上,根据螺旋涡带不同高度的横截面均为圆形且等直径的假设,进行三维重建:
式中:x和y分别为OXYZ坐标系下任意点的X轴和Y轴坐标.
涡带重建区域为80 mm×80 mm×80 mm, 重建结果如图7(d)所示.
2.2 液相速度场
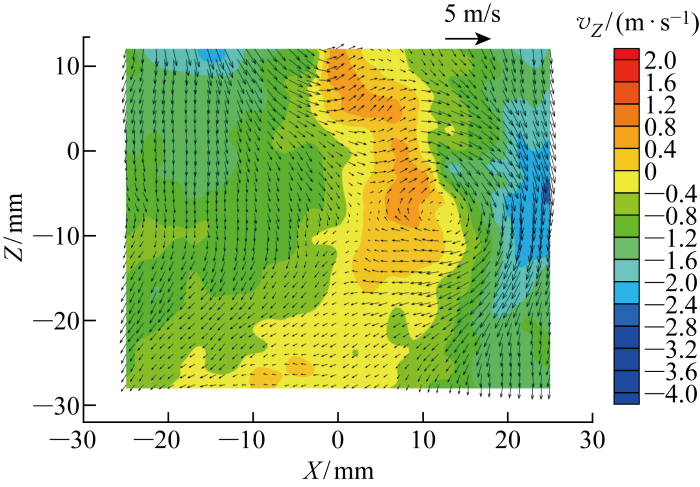
气液两相流PIV的测量受气液界面的影响,气液界面反射的激光及激光通过气液界面后强度的减弱会干扰照相机捕获到的粒子信息,需要对PIV图像进行相位分离处理.现有PIV图像中实现相位分离的技术可以分为3类[15]:①图像采集阶段的基于颜色的光学分离;②PIV互相关计算前通过强度识别、边缘检测等方式进行数字分离;③PIV互相关计算后的分离处理.结合光学分离和PIV计算前的图像处理、PIV计算后的速度矢量处理,尽可能提高计算准确程度.采用涂有罗丹明B的球形空心玻璃珠作为示踪粒子,该粒子在激光照射下发出荧光,结合高通滤光片,滤掉拍摄的PIV图像中反射的激光.中心纵截面液相速度场计算范围为 50 mm×40 mm,首先对拍摄图像进行去背景和滤波处理,再进行PIV计算得到速度矢量,最后对速度矢量进行中值滤波和插值填充,如图8所示.图中:vZ为轴向速度.
图8
3 结果和讨论
3.1 涡带形态的不稳定循环演化
研究范围内,12组不同的实验工况下,均会出现单螺旋涡带、双螺旋涡带、涡带堆叠破裂3种形态的不稳定循环切换,雷诺数的改变对涡带形态没有明显影响,含气率的增加会改变涡带的直径.后文以工况4为例,即Re=0.82×105,β= 0.23%时,对尾水管涡带流动进行分析.
图9
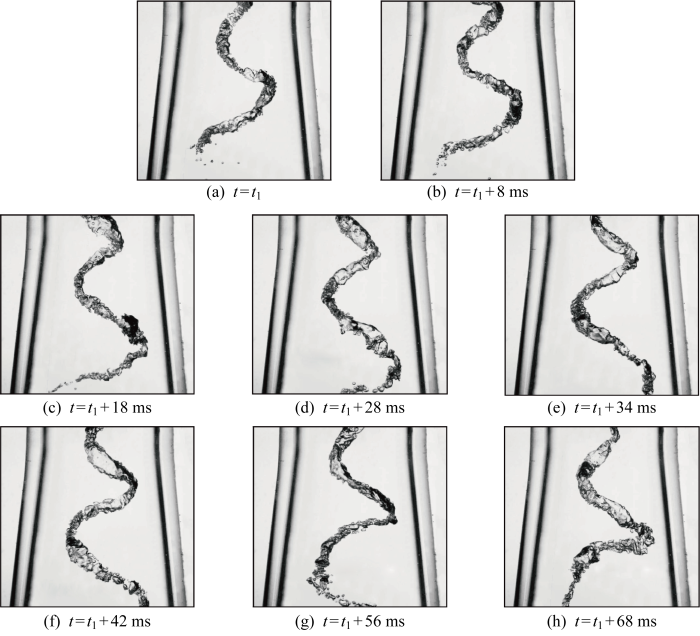
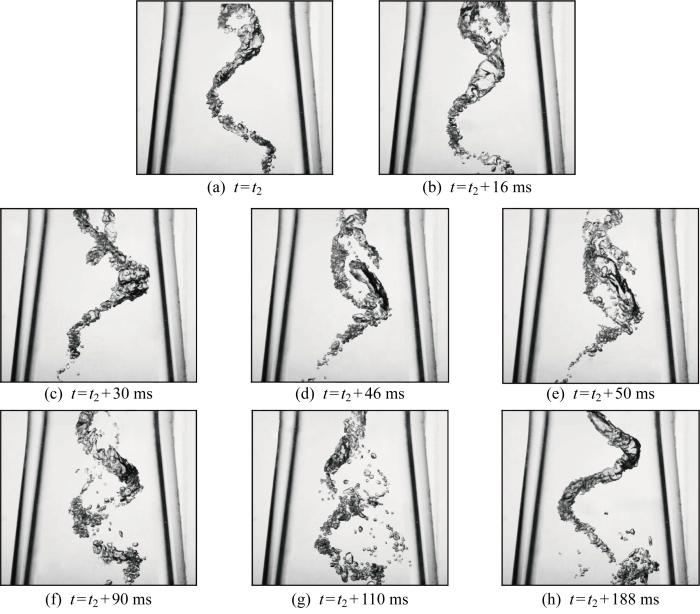
双螺旋涡带的形成和发展如图10所示,t2表示双螺旋涡带某一初始时刻.图10(a)和10(b)表示单螺旋涡带局部一分为二,原有螺旋和新生成的局部螺旋相互缠绕,形态极不稳定,如图10(c)~10(e)所示;随后演化为一条较为稳定的粗螺旋和一条薄弱的细螺旋,如图10(f)和10(g)所示;最终演化回单螺旋涡带形态,如图10(h)所示.在对单双螺旋涡带相互转化的研究中发现了同样的现象,如文献[6]中图5所示,文中指出旋流不稳定性会破坏双螺旋涡带的对称性,使其中一条涡带强度增加,另一条涡带强度减弱,最终合并为一条涡带.相较于文献[6]的研究,本文利用脉冲阴影技术获得了更清晰的界面演化过程,捕捉到更多细节信息.
图10
涡带堆叠破裂的形成和发展如图11所示,t3为涡带堆叠破裂某一初始时刻.单螺旋涡带局部螺旋升角不断减小,直至涡带折断,如图11(a)和11(b)所示;折断后上游涡带和下游涡带不断堆叠,如图11(c)和11(d)所示;随后上游涡带尾部形成气芯环,如图11(e)所示,气芯环破裂后如图11(f)和11(g)所示,最终演化回单螺旋涡带形态,如图11(h)所示.在Alekseenko等[7]对尾水管内涡核重连现象的研究中,单螺旋涡带发生涡核重连后形成独立涡环,涡环在空间上独立于原有单螺旋涡带或被原有螺旋涡带贯穿,如文献[7]中图2及图4所示.文中的涡带堆叠破裂现象与文献[7]有一定相似,不同之处在于涡带折断后,上游涡带尾部形成气芯环,气芯环与上游螺旋涡带为相互连接的整体,直至破裂.
图11

3.2 单螺旋涡带形态和速度场的关联分析
上述3种涡带形态中,单螺旋涡带流场较为清晰,且为水轮机部分负荷运行时最常见的涡带形态,对水力发电机组的稳定运行有重要影响,下面对单螺旋涡带的形态和速度场进行进一步分析.
为清楚描述螺旋涡带的形态和整体旋转进动,左手和右手螺旋方向定义如下: 将螺旋分解为旋转和移动,右手四指握向螺旋的旋转方向,若拇指指向与螺旋的移动方向相同,则称符合右手螺旋方向;若拇指指向与螺旋的移动方向相反,则称符合左手螺旋方向.
涡带旋转进动一个周期内不同时刻的三维形态如图12所示,其中图12(a)~12(f)为一个周期内的不同时刻,t4为某一周期的初始时刻,每个时刻均左图为主视图,右图为俯视图.涡带的形态可以通过任一时刻的三维重建结果判断,单螺旋涡带整体形态近似圆锥螺旋线.如图12(a)中黑色箭头所示,将涡带上游头部作为起点,则涡带旋转方向为逆时针,涡带移动方向竖直向下.根据上述定义,螺旋涡带形态符合左手螺旋方向.涡带整体的旋转进动需要根据多个不同时刻的三维重建结果的变化判断.通过主视图的变化可以得知流场中涡带整体竖直向下移动,如图12(a)中橙色箭头所示.通过俯视图的变化可以得知涡带整体顺时针旋转,如图12(a)中蓝色箭头所示.因此,螺旋涡带整体按照右手螺旋方向旋转进动.根据实验装置设计,液相经过叶轮起旋后进入扩张锥管,如图12(a)中绿色箭头所示,液相主流的旋转方向为顺时针,液相主流的移动方向竖直向下.因此,尾水管内液相主旋流同样符合右手螺旋方向.由此可知,当尾水管内形成单螺旋涡带时,涡带整体随液相主流旋转进动,而涡带形态的螺旋旋向与整体旋转进动的螺旋旋向相反.
图12
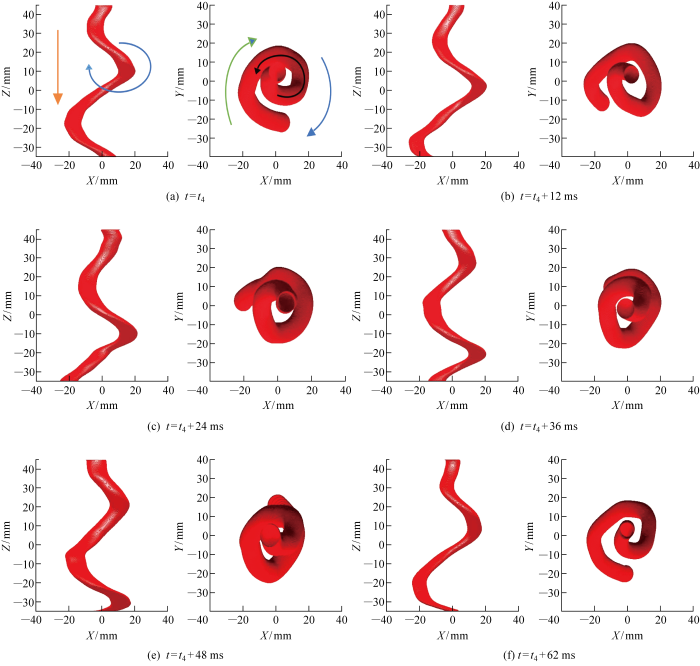
图12
涡带三维形态(主视和俯视图)
Fig.12
Three-dimensional morphology of vortex rope (the main view and top view)
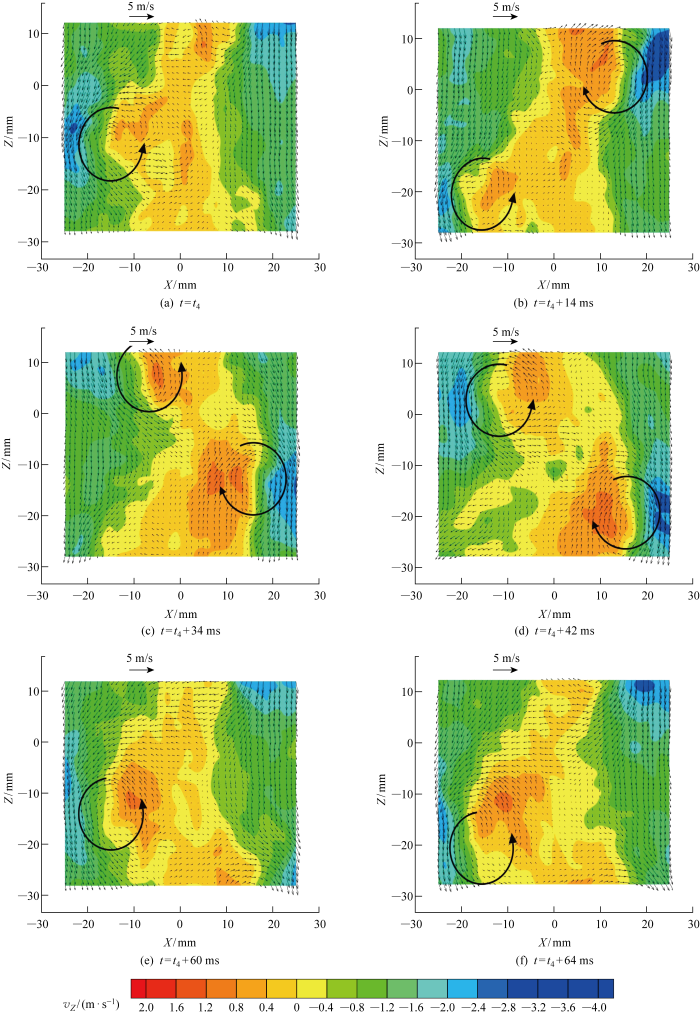
同一个周期内,液相速度矢量计算结果如图13所示,其中图13(a)~13(f)为一个周期内不同时刻. 根据轴向速度的大小和方向,液相流场分为外围主流区和中心滞止区,中心滞止区的轴向速度数值接近0或者方向与外围主流区相反.主流区和滞止区交界面形成轴向剪切层,扰动作用下,剪切层卷起形成旋涡,这可由开尔文-亥姆霍兹不稳定性理论解释.一个周期内,旋涡不断生成,并随主流方向移动脱落.
图13
涡带的形态与液相速度场密切相关,将二者进行空间关联分析,如图14所示.一个周期内不同时刻的空间关联结果表明, 涡带位于主流区和滞止区之间,涡带与速度测量平面的相交位置与液相旋涡位置非常吻合.在靠近涡带的区域,液相的速度数值明显增大,这是由旋转进动的涡带挤压液相流体空间造成的.上述速度测量平面是过尾水管中心轴线的一个平面,由于实验中的尾水管模型为标准的圆锥形状,所以可以认为扩展到空间中其他任意一个过尾水管中心轴线的平面时,涡带与该平面相交的位置均与液相旋涡位置吻合.由此可知,在尾水管气液两相旋流中,主流区和滞止区之间旋涡卷起的位置决定了螺旋涡带的空间形态.此外,涡带位置处的液相旋涡表明,涡带除了整体的旋转进动之外,还存在自身局部绕某个轴线的旋转.
图14
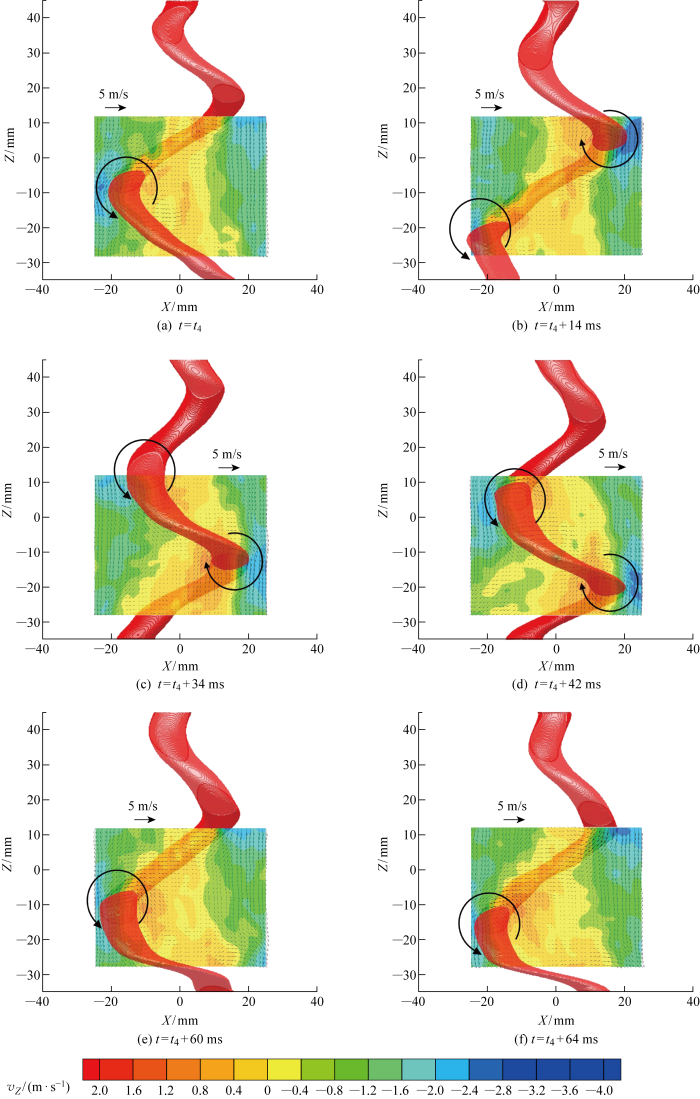
图14
涡带三维形态和速度场空间关联
Fig.14
Spatial correlation between 3D morphology of vortex rope and velocity field
4 结论
(1) 在S=0.74,Re=0.57×105~1.41×105工况范围内,尾水管内均能观察到单螺旋涡带、双螺旋涡带、涡带堆叠破裂3种形态的不稳定循环演化,单螺旋涡带局部一分为二时会转化为双螺旋涡带,单螺旋涡带局部螺旋升角不断减小时会发生涡带堆叠破裂.
(2) 尾水管内呈现单螺旋涡带时,涡带整体随液相主流绕中心轴线旋转进动,同时涡带自身局部存在绕某一轴线的旋转,涡带形态的螺旋旋向与整体旋转进动的螺旋旋向相反,流动根据轴向速度分为主流区和滞止区两部分,两个区域剪切层卷起形成旋涡,液相旋涡的空间位置决定了螺旋涡带的三维形态.
本研究的后期工作:一方面,将进一步发展三维气相形态和三维速度场的同步测量技术,以获得尾水管涡带流动更为完整的实验数据;另一方面,将结合尾水管压力脉动和壁面振动信号的测量,研究不同形态的涡带流动对尾水管的影响机制,为工程应用提供参考.
参考文献
混流式水轮机轴向水推力研究综述和讨论
[J].
Overview and discussion on hydraulic axial thrust in Francis turbine research
[J].
初始运行工况对水泵水轮机飞逸过渡过程水力特性的影响
[J].
Influence of the initial working condition on the hydraulic performance of the pump-turbine during runaway transient scenario
[J].
水泵水轮机甩负荷过渡过程中的压力脉动和转轮受力
[J].
Transient pressure fluctuations and runner loadings of a model pump-turbine during a load rejection process
[J].
Rotating vortex rope formation and mitigation in draft tube of hydro turbines-A review from experimental perspective
[J].
Experimental investigations on upper part load vortex rope pressure fluctuations in francis turbine draft tube
[J].
Comparative analysis of twin vortex ropes in laboratory models of two hydro-turbine draft-tubes
[J].
Vortex reconnection in a swirling flow
[J].
PIV measurements in Francis turbine—A review and application to transient operations
[J].
Experimental investigation of flows inside draft tube of a high-head pump-turbine
[J].
Vortex rope formation in a high head model francis turbine
[J].
3D time-resolved PIV measurement in a francis turbine draft tube
[C]//
Analysis of the cavitating draft tube vortex in a francis turbine using particle image velocimetry measurements in two-phase flow
[J].
水轮机尾水管涡带压力脉动同步及非同步特性研究
[J].
Investigation on synchronous and asynchronous characteristics of pressure fluctuations towards precessing vortex rope in francis turbine draft tube
[J].
The effect of air injection on the parameters of swirling flow in a Turbine-99 draft tube model
[J].
A particle-based image segmentation method for phase separation and interface detection in PIV images of immiscible multiphase flow
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}