

为提高微电网负荷频率的控制品质,许多学者设计了多种控制策略.文献[5⇓-7]中分别设计了不依赖精确数学模型的比例积分微分(Proportional-Integral-Derivative, PID)控制策略、分数阶PID控制策略和自抗扰控制策略.上述控制策略通过仿真验证了各自控制策略在负荷频率控制中的扰动抑制能力.文献[8-9]中针对可再生电力系统中的时滞难点设计滑模控制策略,用于提高可再生电力系统的稳定性.文献[10-11]中考虑不同风电渗透率情况设计模型预测控制,并通过仿真验证模型预测控制在维持系统频率的优势.然而,模型预测控制的模型依赖性使得系统在偏离标称工况时控制品质下降[12].随着人工智能技术的发展,强化学习控制策略也被尝试应用于微电网负荷频率的控制[13-14].然而,在实际工程应用中,强化学习控制策略面临着工程实施难度高、计算量大等挑战.
PID由于结构简单、控制效果稳定等优点在负荷频率控制中应用广泛[15],但是PID存在扰动抑制能力较弱的缺陷[12].为了克服上述缺陷,一种基于预期动态方程的二自由度PID得到越来越多的关注[16],基于预期动态方程的PID控制律设计能够很好地兼顾跟踪和抗干扰能力,并保留了PID结构简单、参数易于整定的优点.针对微电网负荷频率控制的难点,应用基于预期动态方程的PID提高系统的扰动抑制能力.首先,介绍微电网负荷频率的控制模型并分析该模型的控制难点;然后,介绍基于预期动态方程的PID并通过单一变量法分析控制器参数对于控制效果的影响,从而总结出简单、适用和实用的整定流程;最后,将基于预期动态方程的PID在太阳能、风电功率和用户负荷阶跃变化工况,太阳能、风电功率随机波动和用户负荷阶跃变化工况,太阳能、风电功率和用户负荷随机波动工况和微电网负荷频率控制系统存在不确定性工况分别与常规PID进行对比,仿真结果表明:基于预期动态方程的PID能够在保证较强的鲁棒性的同时取得最佳控制效果.
1 微电网负荷频率模型
图1
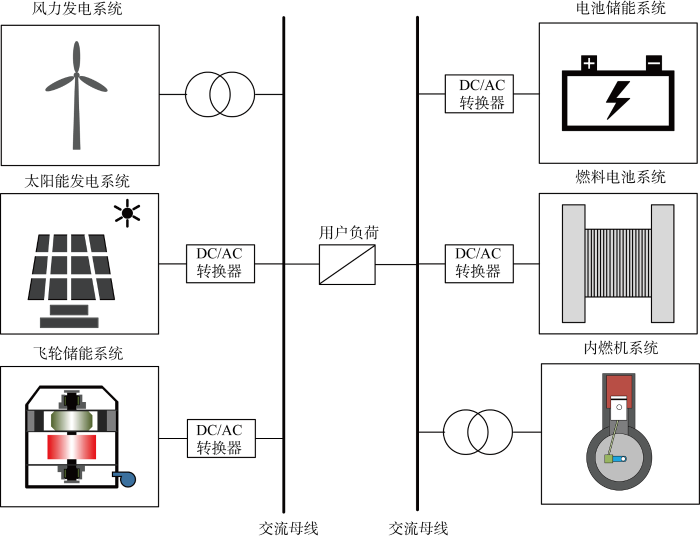
图1
高比例可再生能源微电网的组成示意图
Fig.1
Diagram of high-proportional renewable energy micro-grid
1.1 太阳能发电系统
太阳能发电系统由多个光伏板组成,每个光伏板由多个太阳能电池组成.因此,太阳能电池是太阳能发电的基本组成部分.常用太阳能电池的电学模型由电流源、并联二极管、并联电阻和串联电阻组成.基于其电路结构,可以得到其等效电路为
式中:I、IPV、Id和Ish分别为流过负载的电流、光伏在光照下产生的光电电流、二极管电流和流过并联电阻的电流.
二极管电流可以通过下式进行计算:
式中:I0、VT、Vj1和n分别为反向饱和电流、热电压、二极管和电阻之间的电压和二极管理想因数.
此外,Ish可以通过下式计算:
式中:V为光伏电压;Rs、RSH分别为光伏串联电阻和光伏并联电阻.
此时,太阳能发电系统流过负载的电流可以表示为[5]
结合式(1)~(4),太阳能发电系统的线性模型可以光伏矩阵传递函数GPV(s)和逆变器传递函数GIC(s)表示[17]:
式中:TPV、TIC分别为GPV(s)和GIC(s)的时间常数,TPV=0.04 s,TIC=0.004 s;s为拉普拉斯算子.
1.2 风力发电系统
风力发电系统主要包括变桨控制机构、液压变桨机构、执行机构等,其传递函数可以表示为[16]
式中:TW为风力发电系统的时间常数,TW=1.5 s.
1.3 飞轮储能系统
飞轮储能系统将能量存储在飞轮的惯性中,在用电低谷时,电能用于运行飞轮,使其保持高速运转;在用电高峰时,飞轮带动发电机运转,对外输出电能.一般来说,飞轮储能系统是快速作用装置,可以很容易地消除较小的负载干扰.一般通过一阶传递函数表示为
式中:TFES为飞轮储能系统的时间常数,TFES=0.1 s.
1.4 电池储能系统
电池储能系统充电时,能量以化学离子的形式存储,当连接到负载时,电能被释放.随着技术的发展,电池与电力转换器结合使用,将直流电转换为交流电,能够抑制系统产生的谐波.电池储能系统一般通过一阶传递函数[17]表示为
式中:TBES为电池储能系统的时间常数,TBES=0.1 s.
1.5 燃料电池系统
燃料电池是一种将燃料具有的化学能直接转换成电能的化学装置,是静态能量转换装置.燃料电池系统可以为微电网提供高效率和高可靠性的电量输出,通过一阶传递函数表示为
式中:TFC为燃料电池系统的时间常数,TFC=0.26 s.此外,燃料电池系统还需要逆变器和电源转换器设备,其传递函数分别为
式中:TFC-I、TFC-IC分别为逆变器和电源转换器设备传递函数的时间常数,TFC-I=0.04 s 和TFC-IC=0.004 s.
1.6 内燃机系统
当储能系统和燃料电池系统不能满足负荷需求时,内燃机系统通过持续工作对外输出负荷.内燃机系统主要包括调速器和发电机,传递函数[17]分别为
式中:Tt、Tg分别为调速器和发电机传递函数的时间常数,Tt=0.4 s和Tg=0.08 s.
需要说明的是,风力发电系统和内燃机系统在建模时一般采用高阶模型进行描述,为简化分析,本文建立的微电网负荷频率控制模型中风力发电系统和内燃机系统分别采用一阶模型和二阶模型进行描述,在保证一定的模型精度下,能够有效降低分析难度.该简化模型适用于负荷频率控制分析,在其他电力系统控制分析如调压等特性分析时,建议使用高阶模型进行描述.
将分布式电源来连接到交流母线,组成对外提供电负荷的微电网,电负荷的计算表达式为
式中:PLoad、PPV、PW、PFES、PBES、PFC、PDEG分别为电负荷、太阳能发电系统功率、风力发电系统功率、飞轮储能系统功率、电池储能系统功率、燃料电池系统功率、内燃机系统功率.需要说明的是,PFES和PBES储能时功率为负,反之为正,其输出范围为
为了保证用电量的平衡,可以得到:
式中:ΔPLoad、ΔPPV、ΔPW、ΔPFES、ΔPBES、ΔPFC、ΔPDEG分别为电负荷变化量、太阳能发电系统功率变化量、风力发电系统功率变化量、飞轮储能系统功率变化量、电池储能系统功率变化量、燃料电池系统功率变化量、内燃机系统功率变化量.
电负荷与微电网频率可以通过下式进行等价:
式中:M和D分别是发电机的转动惯量和发电机的阻尼系数,M=0.166 7 s和D=0.001 5,其输出为频率偏差Δf.
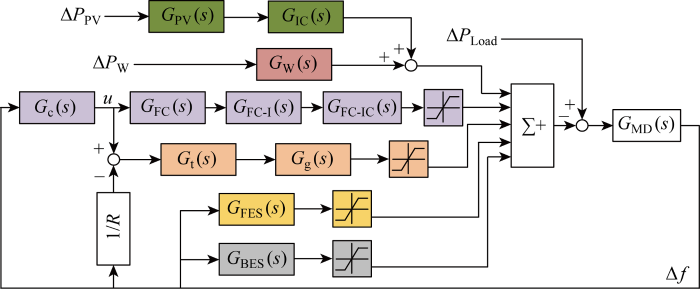
当用户负荷或者风能、光伏等功率发生变化时,微电网频率产生波动,通过调整燃料电池系统和内燃机系统的输出负荷实现负荷频率的稳定控制,其控制框图如图2所示.图中:Gc(s)为荷频率控制的反馈控制器;u为控制量;R为调速器的速度跌落系数.
图2
为了分析上述不同子系统的动态特性,对太阳能发电系统、风力发电系统等子系统进行幅值为1的输入,可以得到各子系统的阶跃响应输出如图3所示.图中:ΔP为功率变化量;t为时间.由图可知风力发电系统、太阳能发电系统分别具有最慢和最快的动态特性,二者的差距比较大,其他子系统的动态特性也较大.这意味着该微电网负荷频率控制的扰动存在快慢特性,其自身系统的响应也有较为明显的区别,这就要求反馈控制器具有较强的抗干扰性能,并且要具有较强的工况适应能力,即鲁棒性要足够强.
图3
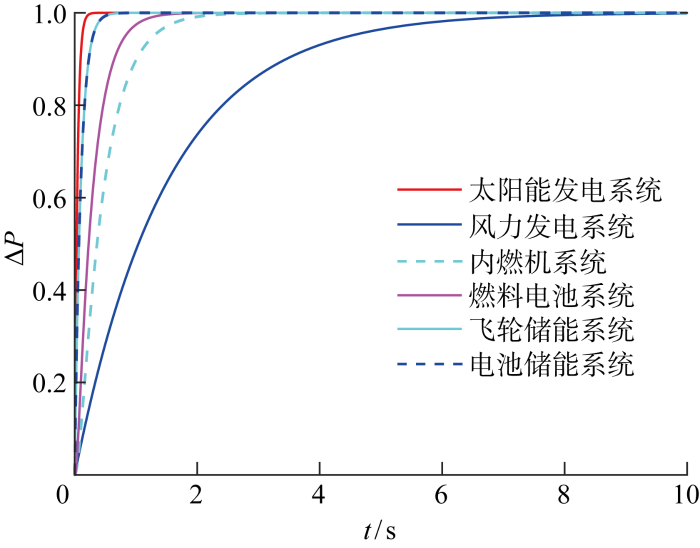
图3
微电网子系统的开环阶跃响应
Fig.3
Open loop step responses of all subsystems in micro-grid
不考虑微电网负荷频率控制模型中的输出限幅环节时,利用梅森变换公式可以得到频率偏差Δf的计算如下:
得到等价微电网模型的等效传递函数,即从控制量u到频率偏差:
将式(5)~(16)中具体的传递函数代入式(19),可以得到Geq(s)是一个相对阶为3、分子和分母阶次分别为8和11的高阶传递函数模型.下面关于控制器的稳定性分析和鲁棒性计算均基于该等效传递函数Geq(s)展开.
2 基于预期动态方程的PID控制器设计
式中:l为与系统增益符号相同的参数;k为设计的增益参数;kp、ki和kd分别为PID控制器的比例增益、积分增益和微分增益;h1、h0为设计的预期动态方程
图4
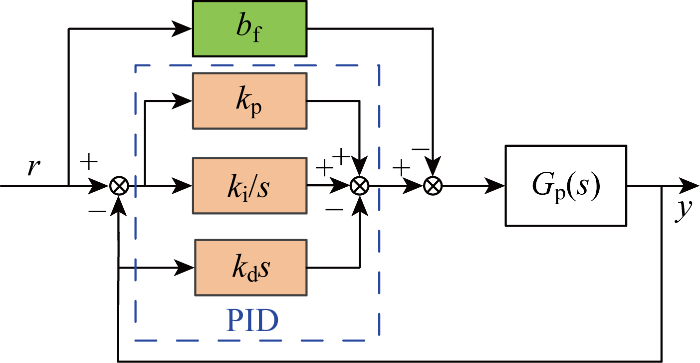
图4
预期动态方程PID的控制结构
Fig.4
Control structure of PID based on desired dynamic equation
基于预期动态方程的PID需要整定的参数为h1、h0、k和l,其中h1和h0为设计的预期动态方程的参数,可以根据预期动态方程进行调整.k和l为可调参数,接下来分析k和l对控制效果的影响.定义观测器的观测误差为Δf=
式中:z2为预期动态方程中的一个变量.
根据f(z, w, u)=z2s-lu,可以得到:
由于式(18)中表示实际被控对象,系统输出和控制量均连续且有界,即
闭环系统的预期动态方程
为了简化参数整定和减少参数的数量,可以将预期动态方程的参数设置为
式中:ωd为预期动态方程的带宽.ωd越大意味着闭环系统的动态响应越快,反之亦然.此时,需要整定的参数变为
图5
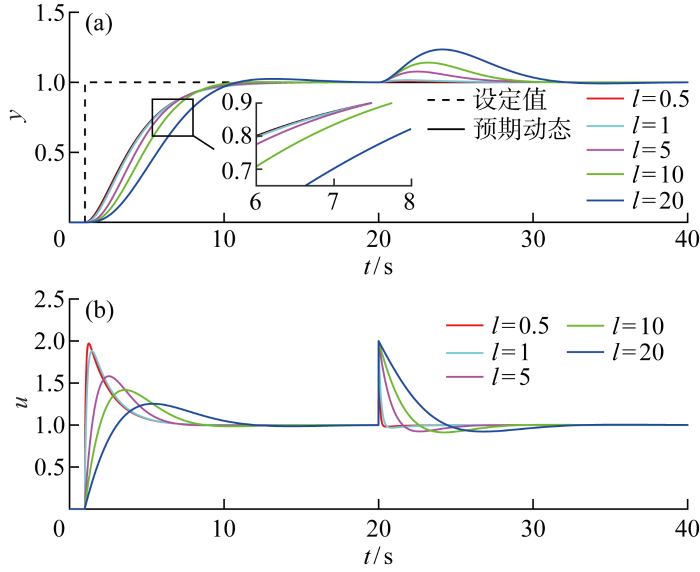
图5
ωd和k保持不变时随着l变化的系统输出和控制量
Fig.5
Outputs and control signals versus l with ωd and k remaining unchanged
图6
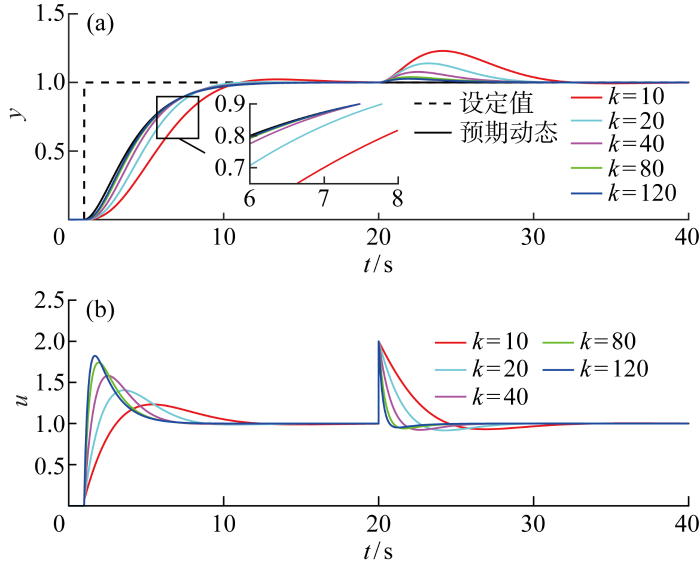
图6
ωd和l保持不变时随着k变化的系统输出和控制量
Fig.6
Outputs and control signals versus k with ωd and l remaining unchanged
图7
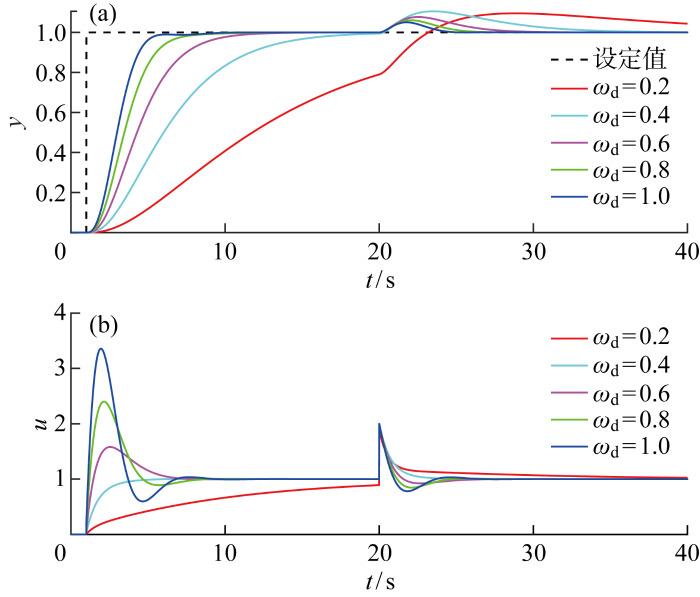
图7
l和k保持不变时随着ωd变化的系统输出和控制量
Fig.7
Outputs and control signals versus ωd with l and k remaining unchanged
基于
(1) 结合系统的动态特性,选择合适的预期动态方程带宽ωd,建议开始时选择ωd保守一些,即选择较小ωd作为初值.
(2) 在k∈[ωd, 100ωd]的范围内,逐步增加k值,k值不宜过大,需要兼顾控制量的限幅作用.
(3) 在l∈
(4) 判断闭环系统是否取得满意的控制效果,如果取得满意的控制效果则中止参数整定流程;反之,则重复步骤(1)~(4).
上述参数整定流程可以整理为图8,需要说明的是,该流程是一种经验试凑的方法,需要进行不断调整达到理想的控制效果,但该方法具有简单、实用和可工程化的优点,有很好的应用潜力.
图8
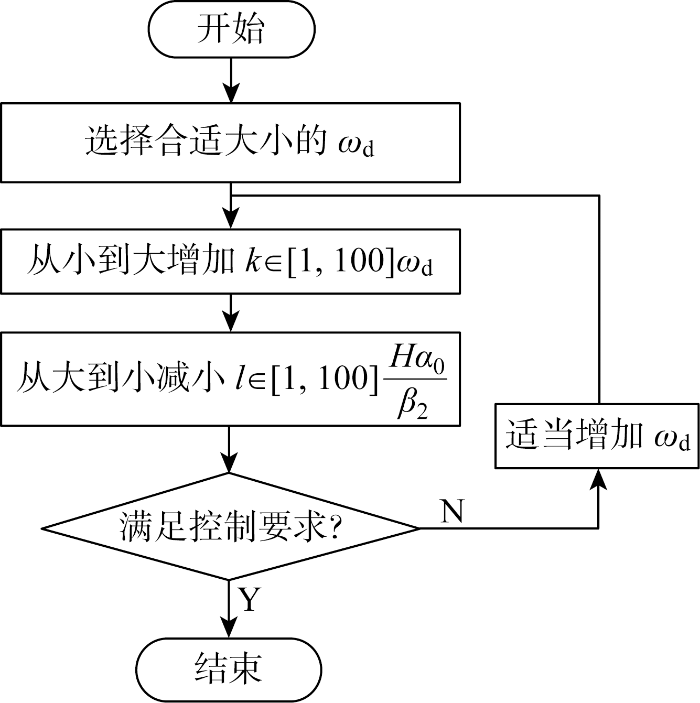
图8
基于预期动态方程的PID参数整定流程
Fig.8
Parameter tuning procedure of the PID based on desired dynamic equation
接下来通过对基于预期动态方程的PID稳定域的计算与分析,进一步探究上述参数与kp、ki和kd之间的关系.
图4所示二自由度PID的稳定域可以通过D-分割法求解,得到其稳定域的表达式:
式中:ω为频域频率;a(ω)、b(ω)分别为被控对象频域的实部和虚部.将式(25)代入式(26),可以得到基于预期动态方程的PID稳定域的计算表达式为
图9
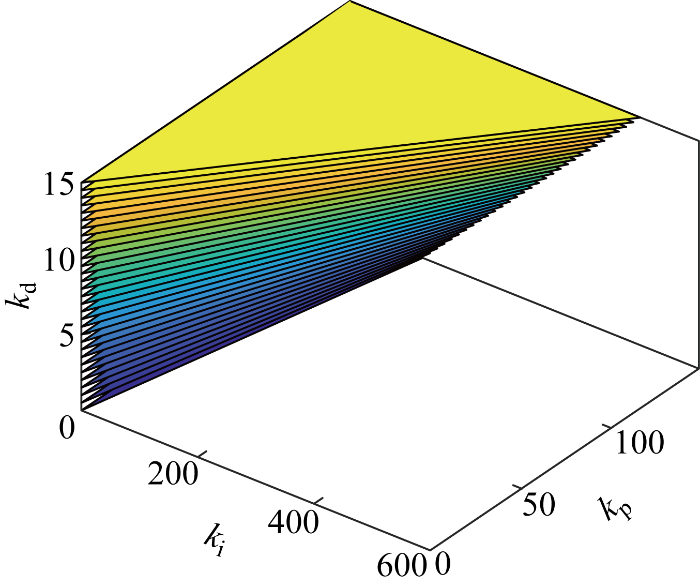
图9
PID稳定域
Fig.9
Distributions of
图10
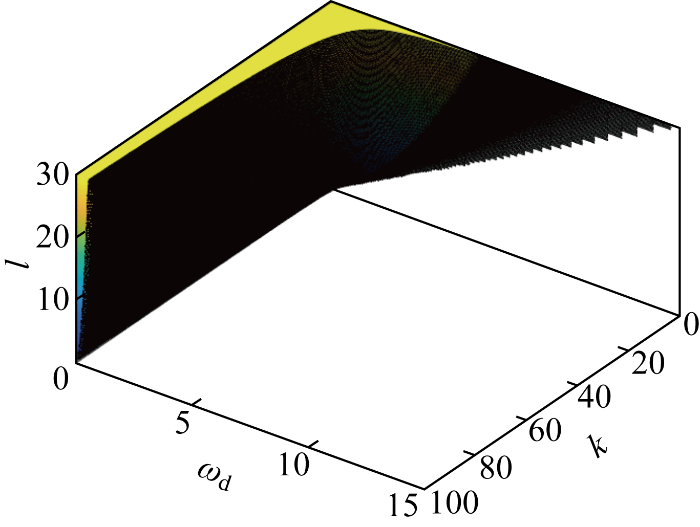
图10
基于预期动态方程的PID参数
Fig.10
Distributions of
图11
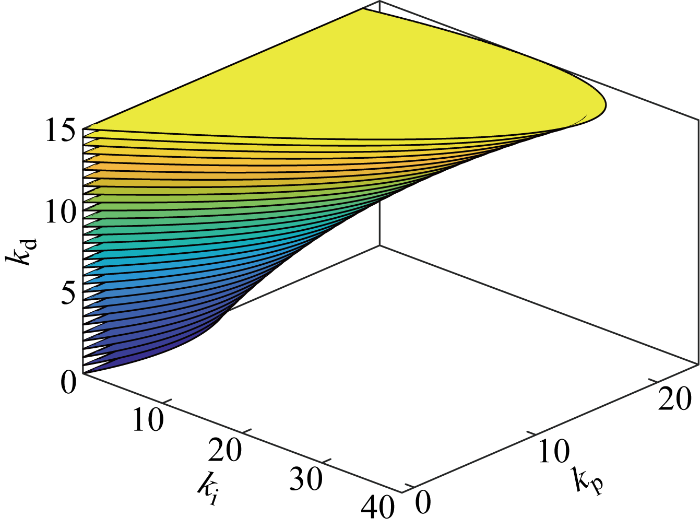
图11
系统存在纯滞后时PID稳定域
Fig.11
Distributions of
图12
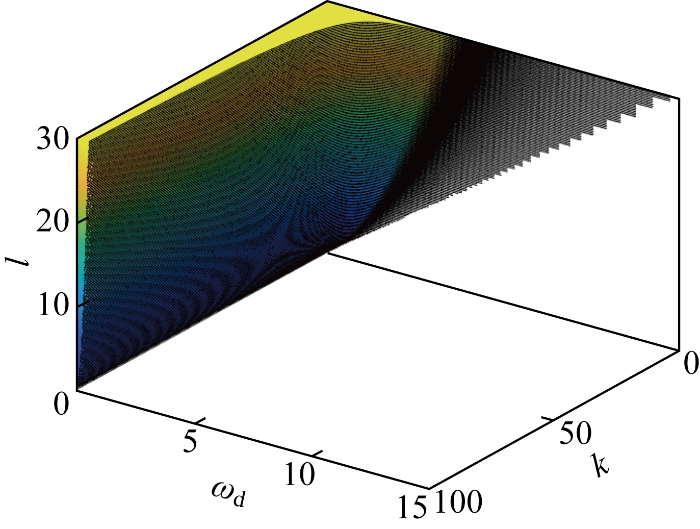
图12
系统存在纯滞后时基于预期动态方程的PID参数
Fig.12
Distributions of
此时,通过合适的参数整定,闭环系统和预期动态方程
(1) 通过二自由度结构的PID参数调整能够使得闭环系统的动态方程与预期动态方程保持一致.
(2) 基于预期动态方程的PID具有的二自由度结构使得扰动抑制性能和跟踪性的设计能在一定程度上解耦,通过参数优化调整可以增强系统的扰动抑制能力.
(3) 建立PID与预期动态方程之间的定量化参数关系,使得参数物理意义更加明确.
(4) 由于前馈控制系数bf的存在,使得反馈PID控制器主要用于随机性的太阳能、风电以及用户负荷的频率等扰动抑制,能够提高微电网的频率控制品质.
为了验证基于预期动态方程PID的控制效果,将基于预期动态方程的PID(PID-DDE)应用在Feedback公司生产的水箱实验台.此外,对比控制器为采用遗传算法以误差绝对值积分(Integral Absolute Error,IAE)作为适应度函数优化的PID(PID-OP),可以得到图13所示的结果.由图可见,PID-DDE能够用更快的速度达到稳态,且具有更小的超调;PID-OP跟踪速度较慢,且具有较大的超调.该水箱实验台验证了PID-DDE对于性能的提升能力,为PID-DDE在微电网负荷频率控制中应用提供基础.
图13
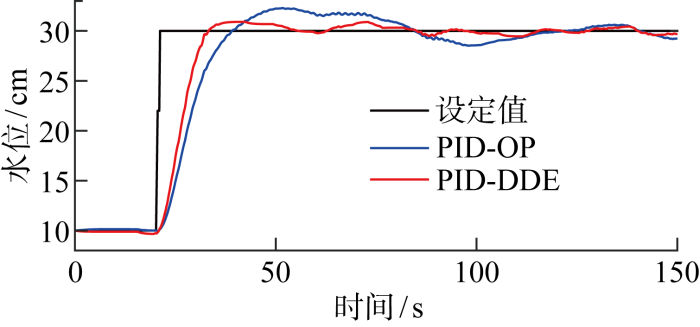
图13
水位设定值阶跃变化的跟踪效果
Fig.13
Tracking performance of water level with step change
3 仿真验证
根据上面的分析可知,该微电网负荷频率控制的扰动具有快慢特性.为了能够较好地抑制风力发电系统和太阳能发电系统的扰动,结合基于预期动态方程的PID在抗干扰能力的优势,将其应用于图2所示的微电网负荷频率控制系统中,参数整定时的性能要求:①Δf的输出尽可能光滑;②外部扰动发生时,Δf能够尽可能快地恢复到稳态值并且Δf的峰值尽可能小.选择文献[16]中设计的适用的PID参数(PID-O)作为对比.此外,针对该微电网负荷频率控制采用基于遗传算法以IAE作为适应度函数对PID参数进行优化.PID-DDE、PID-O和PID-OP的参数如表1所示.需要说明的是,为了降低噪声等信号对于控制量的影响,PID中的微分均采用实际微分的形式, 即kd
表1 PID-DDE、PID-O和PID-OP参数
Tab.1
| 控制器 | 参数 |
|---|---|
| PID-DDE | ωd=3.5, k=20, l=20 |
| PID-O | kp=3.712, ki=1.391, kd=0.333 |
| PID-OP | kp=3.997 1, ki=6.632 5, kd=2.400 0 |
3.1 工况1:太阳能、风电功率和用户负荷阶跃变化时的控制效果
图14
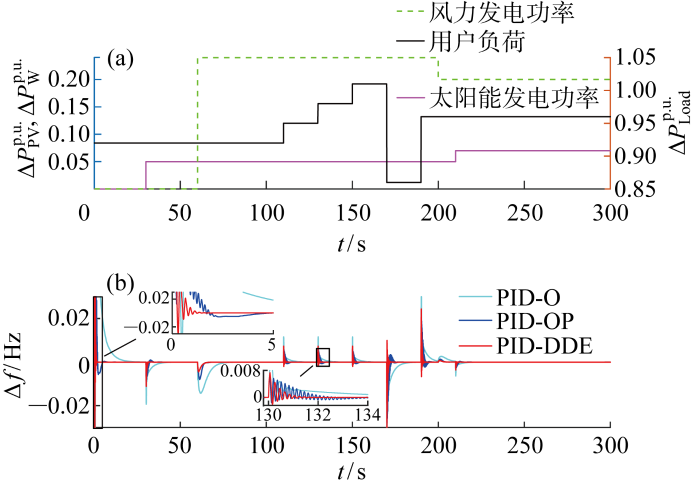
图14
太阳能、风电功率和用户负荷阶跃变化时的控制效果
Fig.14
Control performance with step changes in solar power, wind power, and consumer load
为了定量地衡量控制效果, IAE、误差绝对值时间积分(Integral of Time Absolute Error, ITAE)、误差积分(Integral of Error, IE)、误差平方积分(Integral of Squared Error, ISE)和误差平方时间积分(Integral of Time Squared Error, ITSE)作为性能指标进行计算,计算公式见附录B,可以得到表2所示的结果.由表可见,PID-DDE的各性能指标均有明显优势,进一步证明了该方法在微电网负荷频率控制中的优势.
表2 工况1的控制性能指标统计
Tab.2
| 控制器 | IAE | ITAE | IE | ISE | ITSE |
|---|---|---|---|---|---|
| PID-DDE | 0.0773 | 4.3578 | 0.0282 | 0.0058 | 0.0398 |
| PID-OP | 0.1623 | 9.2692 | 0.0520 | 0.0071 | 0.0736 |
| PID-O | 0.5975 | 31.9650 | 0.2480 | 0.0373 | 0.2851 |
3.2 工况2:太阳能、风电功率随机波动和用户负荷阶跃变化时的控制效果
图15
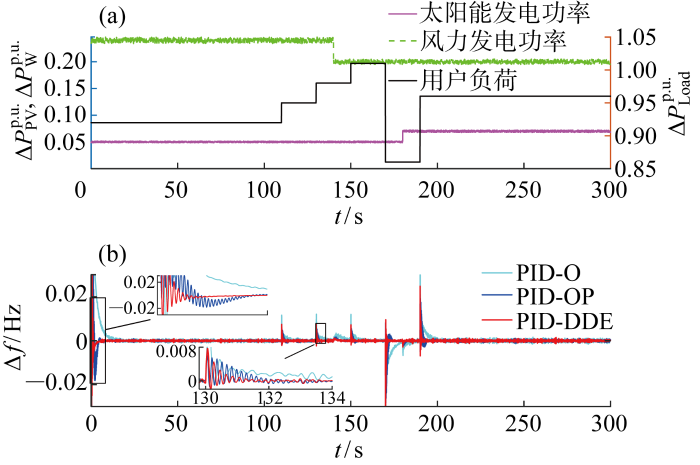
图15
太阳能、风电功率随机波动和用户负荷阶跃变化时的控制效果
Fig.15
Control performance with random fluctuation in solar and wind power and step changes in consumer load
表3 工况2的控制性能指标统计
Tab.3
| 控制器 | IAE | ITAE | IE | ISE | ITSE |
|---|---|---|---|---|---|
| PID-DDE | 0.1254 | 12.7179 | 0.0282 | 0.0051 | 0.0412 |
| PID-OP | 0.1906 | 17.2774 | 0.0521 | 0.0061 | 0.0713 |
| PID-O | 0.4578 | 37.7171 | 0.2482 | 0.0261 | 0.2264 |
3.3 工况3:太阳能、风电功率和用户负荷随机波动时的控制效果
图16
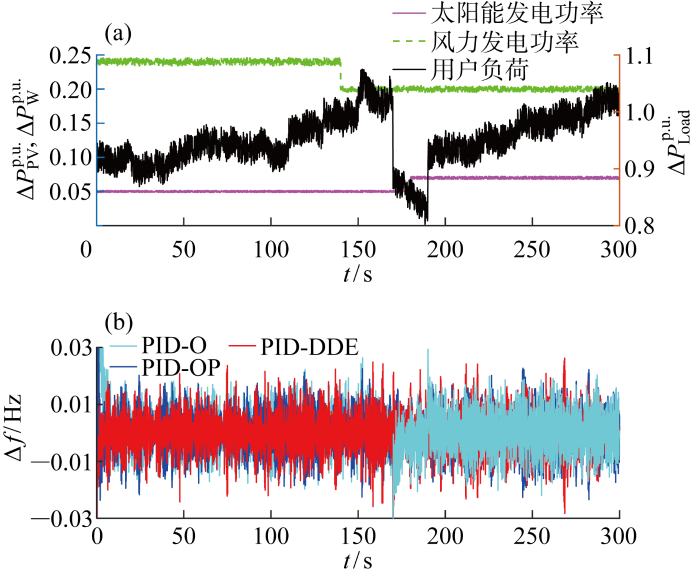
图16
太阳能、风电功率和用户负荷随机波动时的控制效果
Fig.16
Control performance with step changes in solar power, wind power, and consumer load
表4 工况3的控制性能指标统计
Tab.4
| 控制器 | IAE | ITAE | IE | ISE | ITSE |
|---|---|---|---|---|---|
| PID-DDE | 1.2947 | 192.4833 | 0.0302 | 0.0145 | 1.5637 |
| PID-OP | 1.5951 | 236.5464 | 0.0557 | 0.0179 | 1.9389 |
| PID-O | 1.8713 | 254.9701 | 0.2689 | 0.0383 | 2.2728 |
3.4 工况4:应对不确定性系统的控制效果
由于微电网建模过程中存在必要的简化和近似,且工况变化时系统动态发生变化,必须考虑控制器的鲁棒性,即控制器应对系统不确定性的能力.
图17
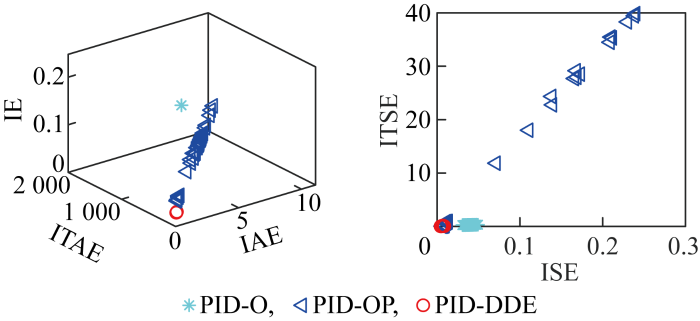
图17
工况1的蒙特卡洛实验结果
Fig.17
Monte Carlo experimental results under working Condition 1
图18
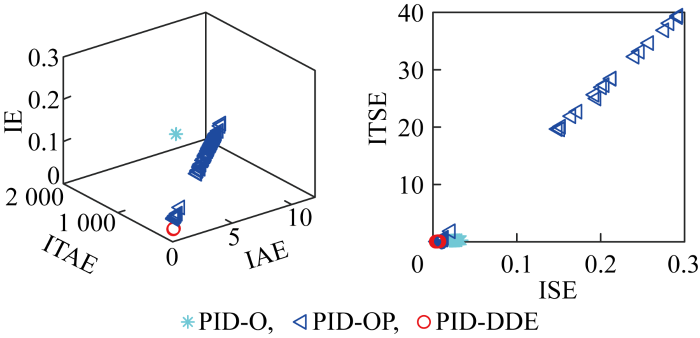
图18
工况2的蒙特卡洛实验结果
Fig.18
Monte Carlo experimental results under working Condition 2
图19
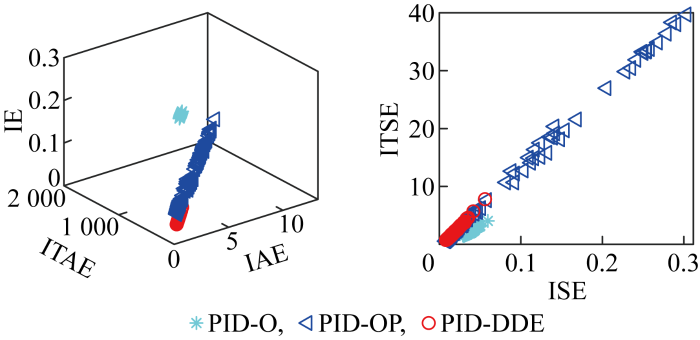
图19
工况3的蒙特卡洛实验结果
Fig.19
Monte Carlo experimental results under working Condition 3
通过上述分析可知,PID-DDE不仅能够保证微电网系统在标称工况下的控制效果,在微电网系统存在不确定性时,也能够取得令人满意的控制效果.需要说明的是,可以采用遗传算法对基于预期动态方程PID三个参数进一步优化,进一步提高微电网系统的控制性能.
4 结论
风电、太阳能的随机性和暂态性给高比例可再生能源并入微电网带来较大的负荷频率控制挑战.针对微电网负荷频率控制面临的多源不确定性扰动问题,提出基于预期动态方程的PID控制策略.主要工作如下:
(1) 在分析微电网负荷频率控制模型和控制难点的基础上设计基于预期动态方程的PID控制策略,并通过单一变量法分析控制器参数对控制效果的影响,总结了简单、实用的参数整定流程.
(2) 与其他控制策略相比,所提方法能够在太阳能、风电功率和用户负荷随机波动等多个工况中具有抗干扰能力最强、频率偏差最小,恢复到稳态值所需时间最短等优势.在微电网系统存在不确定性时仍具有最佳控制性能.
基于预期动态方程的PID控制策略能够提高包含高比例可再生能源微电网的负荷稳定性,对电网安全运行具有重要意义.在未来工作中,将进一步完成实验台的验证和现场的应用,通过实验对比数据以及在现场运行数据进一步验证该方法的有效性.
附录见本刊网络版(
参考文献
新能源电力系统控制与优化
[J].
Control and optimization of alternate electrical power system with renewable energy sources
[J].
多源配网主动孤岛恢复过程电压频率波动的平抑方法
[J].
DOI:10.16183/j.cnki.jsjtu.2021.418
[本文引用: 1]

多源配网主动孤岛恢复是极端条件下保障关键负荷供电的重要手段,有利于提高配电网的供电可靠性.主动孤岛恢复过程中存在负载和分布式电源组网瞬间产生暂态电压、频率波动的问题,影响孤岛安全稳定运行,严重时还会出现组网失败.为此,考虑储能系统功率响应的快速性,建立基于储能控制的主动孤岛动态组网电压、频率波动平抑模型,设计电压电流双环前馈扰动补偿控制系统,提出改进双环控制的储能系统矢量控制方法,解决了传统V/f控制电压偏移和电压波动过大问题.依据黑启动原则,利用MATLAB/Simulink软件搭建不同控制方式下的仿真模型,仿真结果表明:相较于采用传统V/f控制,基于矢量法的改进双环控制具有较强的抗干扰能力,能够明显改善孤岛黑启动自组网过程和孤岛并入主网瞬间的电压及频率波动,提高系统的动态响应性能.
Voltage and frequency suppression of intentional islanding restoration process for distribution system with multi-generations
[J].
Coordinated control of air-conditioning loads for system frequency regulation
[J].
Challenges and opportunities of load frequency control in conventional, modern and future smart power systems: A comprehensive review
[J].
Design of cascaded controller based on coyote optimizer for load frequency control in multi-area power systems with renewable sources
[J].
Load frequency regulation by de-loaded tidal turbine power plant units using fractional fuzzy based PID droop controller
[J].
Load frequency regulation for multi-area power systems with renewable sources via active disturbance rejection control
[J].
Sliding mode load frequency control design for the novel integrated model of time-delay renewable power system
[J].
Improved sliding mode design for load frequency control of power system integrated an adaptive learning strategy
[J].
含规模化风电场/群的互联电网负荷频率广域分散预测控制
[J].
Decentralized model predictive control based load frequency control for high wind power penetrated power systems
[J].
Model predictive control and optimization of networked microgrids
[J].
From PID to active disturbance rejection control
[J].
Data-driven load frequency control for stochastic power systems:A deep reinforcement learning method with continuous action search
[J].
基于改进多智能体深度确定性策略梯度的多微网负荷频率协同控制策略
[J].
Load frequency coordinated control strategy of multi-microgrid based on improved MA-DDPG
[J].
The dilemma of PID tuning
[J].
Desired dynamic equational proportional-integral-derivative controller design based on probabilistic robustness
[J].
Load frequency control in stochastic macro grid
[EB/OL]. (
Design of PI controllers based on non-convex optimization
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}