复杂环境下基于改进Informed RRT*的无人机路径规划算法
Unmanned Aerial Vehicle Path Planning Algorithm Based on Improved Informed RRT* in Complex Environment
复杂环境下基于改进Informed RRT*的无人机路径规划算法 |
| 刘文倩, 单梁, 张伟龙, 刘成林, 马强 |
|
Unmanned Aerial Vehicle Path Planning Algorithm Based on Improved Informed RRT* in Complex Environment |
| LIU Wenqian, SHAN Liang, ZHANG Weilong, LIU Chenglin, MA Qiang |
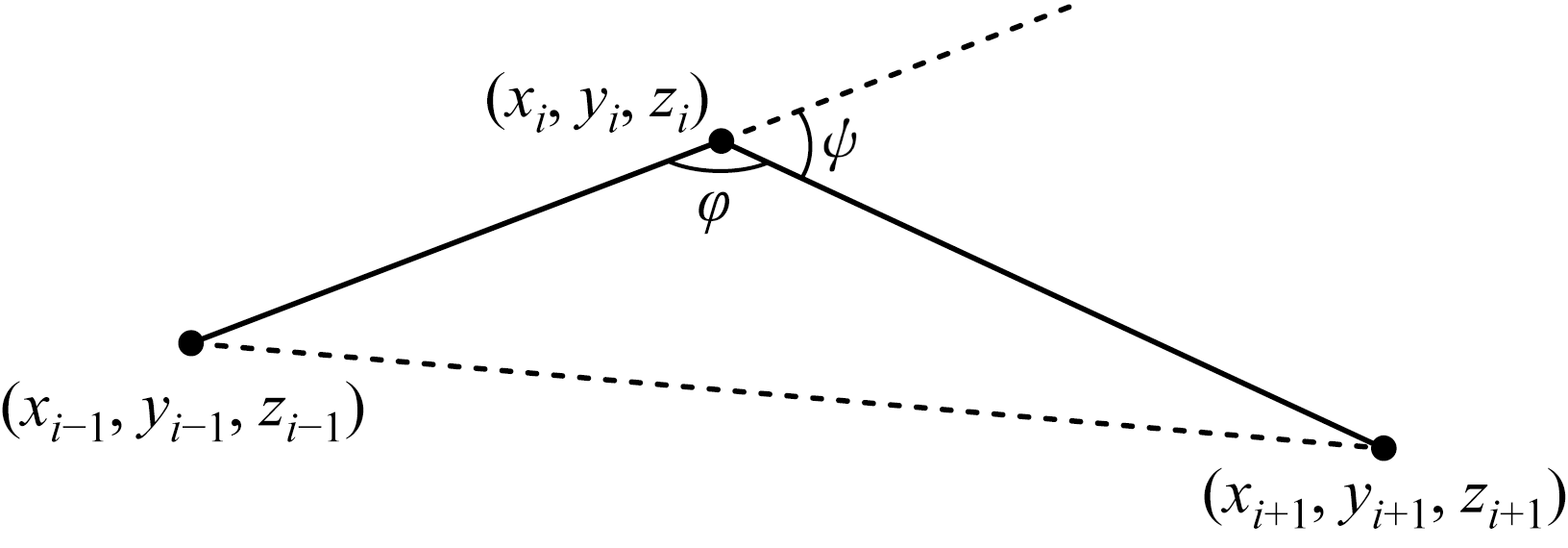
| 图2 相邻两段路径偏航角示意图 |
| Fig.2 Schematic diagram of yaw angle of two adjacent paths |
|
|