复杂环境下基于改进Informed RRT*的无人机路径规划算法
Unmanned Aerial Vehicle Path Planning Algorithm Based on Improved Informed RRT* in Complex Environment
复杂环境下基于改进Informed RRT*的无人机路径规划算法 |
| 刘文倩, 单梁, 张伟龙, 刘成林, 马强 |
|
Unmanned Aerial Vehicle Path Planning Algorithm Based on Improved Informed RRT* in Complex Environment |
| LIU Wenqian, SHAN Liang, ZHANG Weilong, LIU Chenglin, MA Qiang |
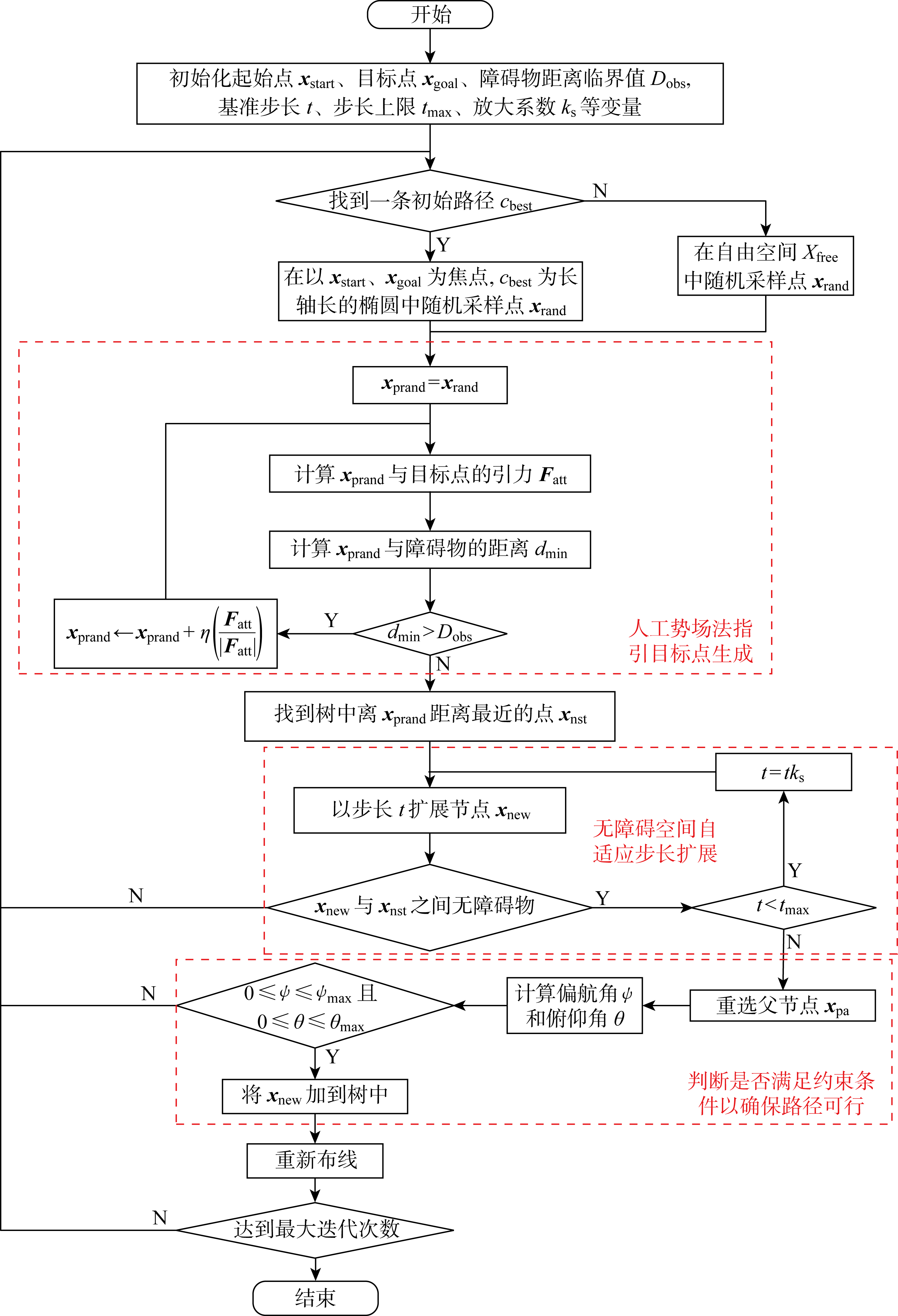
| 图10 基于自适应步长的APF-IRRT*路径规划算法流程图 |
| Fig.10 Flow chart of APF-IRRT* path planning algorithm based on adaptive step size |
|
|