许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] .
对不确定系统的反馈控制大致分为输出反馈控制和状态反馈控制两大类.输出反馈直接通过测量输出进行反馈以便于工程应用,得到许多研究者的青睐,文献[6 ]中提出一种关于多面体系统的H 2 和H ∞ 输出反馈控制方法,文献[8 ]中通过鲁棒稳定函数来实现鲁棒静态输出反馈控制器.这些控制方案大多应用二次稳定性的概念,只需线性矩阵不等式(LMI)在多面体的顶点上收敛,以保证系统稳定性.状态反馈在实践中状态变量难以测量,往往需要借助观测器,文献[9 ]中提出基于观测器不确定系统的鲁棒性LMI优化控制方法,能保证不确定系统的稳定性.但当涉及到不确定有理参数时,系统基于观测器的线性矩阵不等式组(LMIs)设计,大多为非凸的[7 ] 、保守的[9 ] 或需要计算和操纵特征多项式的参数相关系数[8 ] .
为此,文献[10 ]中提出一种基于凸LMIs的启发式算法,其中详细描述的描述符多仿射表示(DMAR)和松弛变量(S )方法对不确定的有理参数具有效性.同时,基于多仿射的性质和S 变量的框架,可得到凸的LMIs及可行解.但当与测量输出相关的矩阵含有不确定参数时,其鲁棒反馈设计更为复杂.因鲁棒观测状态反馈设计需涉及观测器矩阵C 是一个待求参数,而不再是系统自身的测量输出矩阵,这使S 变量LMIs框架更加复杂,此问题仍是一个挑战[10 -11 ] .
为解决上述问题,提出一种基于新龙伯格(Luenberger)类型观测器的鲁棒状态反馈设计方法.首先,针对实践中状态数据难以测量的问题及测量输出相关矩阵含有不确定性的情况,设计一种新龙伯格类型观测器;其次,基于新龙伯格类型观测器,结合DMAR和S 变量框架,得到与李亚普诺夫函数相关的凸LMI条件,并对闭环系统进行基于LMIs的鲁棒稳定性分析;最后,通过实验检验上述条件的可行性,证明方法的实用性和有效性.
符号说明:A T 是矩阵A 的转置;Aξ 表示对称矩阵A T +A ;A ≻B 是矩阵不等式,表示A -B 是对称正定的. 如果N (X )在决策变量X 中是仿射的,则称N (X )≻0型的一个矩阵不等式是一个LMI. Ξ v - = ξ v = 1 , … , v - ≥ 0 , ∑ v = 1 v - ξ v = 1 R v - ξv 为 v - . 对于离散时间信号vk ≥0 ,v 2 2 = ∑ k = 0 v T k ∞ v k L 2 范数平方,v 2 , k - 2 = ∑ k = 0 v T k k - v k v p k ≥0 (v T k vk )1 / 2 是欧几里得范数随时间变化的峰值.
1 问题提出及状态反馈设计
(1) $\begin{matrix} & {{x}_{k}}_{+1}={{A}_{r}}(\theta ){{x}_{k}}+{{B}_{r}}(\theta ){{u}_{k}}+{{B}_{rw}}(\theta ){{w}_{k}} \\ & {{z}_{k}}={{C}_{rz}}(\theta ){{x}_{k}}+{{D}_{rzu}}(\theta ){{u}_{k}}+{{D}_{rzw}}(\theta ){{w}_{k}} \\ & {{y}_{k}}={{C}_{ry}}(\theta ){{x}_{k}} \\ \end{matrix}$
式中:xk ∈Rn yk ∈Rp uk ∈Rm wk ∈Rv zk ∈Rq Ar (θ )∈Rn × n θ ), Br (θ )∈Rn × m θ ), Brw (θ )∈Rn × v θ ), Crz (θ )∈Rq × n θ ), Drzu (θ )∈Rq × m θ ), Drzw (θ )∈Rq × v θ ), Cry (θ )∈Rp × n θ )都是关于不确定参数θ 的有理矩阵. 假设参数θ 位于集合Θ 中,定义集合Θ 为p - θ ∈Θ ={(θ 1 , …, θ p - ) ∈Θ 1 ×…×Θ p - θ 的p - R m p . 假设每个集合Θp 是具有v - p Vp 的顶点组成的多面体,Vp ={θ p [ 1 ] θ p [ v - p ] .Θp 是顶点的凸组合,Θp =Co(Vp )={θp =∑ v p = 1 v - p ξ p , v p θ p [ v p ] ξp ∈Ξ v - p .V =V 1 ×…×V p - V 的一个通用元素将用θ [ v ] 表示,其中v =[v 1 … v p - ℓ 表示所有v 向量的集合[10 ] . 验证集合V 和ℓ 的基数为,v = = ∏ p = 1 p - v - p .
注1 文献[10 ]中仅考虑输出矩阵Cry (θ )为一个常数的情形,而本文中输出矩阵Cry (θ )是关于不确定参数θ 的有理多项式矩阵,文献[10 ]中的研究仅为本文的特例,并不能解决本文所面对的问题.
首先,引入多仿射概念. 如矩阵在每个θp 中都是仿射的,则在参数θ 中是多仿射的. 同时,每个多仿射矩阵Mi (θ )可写成V 中顶点的凸组合,Mi (θ )=∑ v = 1 v = ξi , v Mi θ [ v ] ),ξi ∈Ξ v = . 矩阵M (θ )也是多仿射的,M (θ )中的每个元素可表示为
(2) m ( θ ) = ∑ k 1 , … , k N ∈ { 0,1 } α k 1 , … , k N θ 1 k 1 … θ N k N
式中:α k 1 , … , k N k 1 , …, kN ∈{0,1}.
(3) x k + 1 z k y k = R (θ) x k u k w k
(4) R (θ) : = A r ( θ ) B r ( θ ) B r w ( θ ) C r z ( θ ) D r z u ( θ ) D r z w ( θ ) C r y ( θ ) 0 0 ∈ R ( n + q + p ) × ( n + m + v ) (θ)
将式(4)中R (θ )表示为如下DMAR形式[10 ] :
(5) R (θ) = E x ( θ ) E y ( θ ) E z ( θ ) E π - 1 (θ) M 3 (θ)
式中:Ex (θ )∈Rn × t θ );Ey (θ )∈Rq × t θ );Ez (θ )∈Rp × t θ );Eπ (θ )∈Rt × t θ );M 3 (θ )=[A (θ ) B (θ ) Bw (θ )]∈Rt ×( n + m + v ) (θ ).
假设基于系统式(1)的DMAR,构建新龙伯格类型的动态观测器与观测状态反馈器,以确保系统的鲁棒稳定性和输入/输出H ∞ 性能.动态观测器和观测状态反馈器分别表示为
(6) ${{\hat{x}}_{k+1}}={{A}_{o}}{{\hat{x}}_{\text{k}}}+{{B}_{o}}{{u}_{k}}+L({{C}_{o}}{{\hat{x}}_{\text{k}}}-{{y}_{k}})$
(7) ${{u}_{k}}=K{{\hat{x}}_{k}}$
式中:x ^ k n L 为观测器增益;Ao 、Bo 、Co 为待求矩阵.
注2 构建的新龙伯格类型的动态观测器与传统龙伯格类型观测器的不同在于传统观测器中的Co 直接来自于不确定系统的已知输出矩阵,为研究对象自身的测量输出矩阵[10 ,12 ] .由于本研究中的系统测量输出矩阵不确定,故新构建的龙伯格类型观测器中含有对测量输出进行估计的待求参数Co .
设计状态反馈增益K ,使其具有状态反馈uk =Kxk 的闭环系统,满足鲁棒稳定性和输入/输出H ∞ 性能. 设计K 的过程详见文献[10 ]的引理2和定理5.
2 鲁棒观测器设计
由于理想状态通常不可测量,所以在实践中状态反馈控制是基于状态估计x ^ ${{u}_{k}}=K{{\hat{x}}_{k}}$ . 基于此观测状态反馈,设计龙伯格类型的观测器如下:
(8) ${{\hat{x}}_{k+1}}={{A}_{o}} ~ {{\hat{x}}_{\text{k}}}+{{B}_{o}}{{u}_{k}}+L({{C}_{o}}{{\hat{x}}_{\text{k}}}-{{y}_{k}})$
定义理想状态和估计状态的误差ek =xk -x ^ k $\epsilon_{k}=Ke_{k}$ . 为求取新龙伯格类型的观测器待求参数,提出新的系统的等价性引理和稳定性定理.
基于DMAR和S 变量框架,得出以下与观测器设计相关的引理.
引理1 在DMAR式(5)下,设A ^ o Ao +Bo K +LCo , η T o , k = e T k + 1 π T o 1 , k π T o 2 , k e T k x T k E o (θ) = I E x ( θ ) L E z ( θ ) - A ^ o A ^ o 0 E π ( θ ) 0 - B ( θ ) K A ( θ ) + B ( θ ) K 0 0 E π ( θ ) 0 A ( θ ) Eo (θ )ηo , k ek =xk -x ^ k xk 到$\epsilon_{k}$
注3 提出的引理1基于上述新龙伯格类型的观测器,结合DMAR和S 变量框架得到,是下文引理和定理的基础.
证明 在扰动wk =0的情况下,联立式(1)、式(7)和式(8)进行简单操作,得到理想状态xk 和观测状态x ^ k
$\begin{matrix} & {{e}_{k}}_{+1}=({{{{\hat{A}}}}_{\text{o}}}-{{B}_{r}}(\theta )K){{e}_{k}}+({{A}_{r}}(\theta )+ \\ & {{B}_{r}}(\theta )K+L{{C}_{ry}}(\theta )-{{{{\hat{A}}}}_{\text{o}}}){{x}_{k}}= \\ & {{{{\hat{A}}}}_{\text{o}}}{{e}_{k}}-{{{{\hat{A}}}}_{\text{o}}}{{x}_{k}}+L{{E}_{z}}(\theta )E_{\pi }^{-1}(\theta )A(\theta ){{x}_{k}}+ \\ & {{E}_{x}}(\theta )E_{\pi }^{-1}(\theta )[(A(\theta )+B(\theta )K){{x}_{k}}-B(\theta )K{{e}_{k}}] \\ \end{matrix}$
由式(5)得到精确的Eo (θ )ηo , k
${{\pi }_{o}}_{1,k}=E_{\pi }^{-1}~(\theta )[B(\theta )K{{e}_{k}}-(A(\theta )+B(\theta )K){{x}_{k}}]$
${{\pi }_{o}}_{2,k}=-E_{\pi }^{-1}(\theta )A(\theta ){{x}_{k}}$
进行观测器设计前,为保持动态尽可能相似,需对预期的状态轨迹进行估计.文献[10 ]定理6中,理想状态x 通过W x 2 $\epsilon$ Wx 为观测状态轨迹,W =Q 1 / 2 .
设计观测器的目标是提供一个估计x ^ k Kxk 与实际控制K x ^ k $\epsilon_{k}$ K 和状态xk 的可能轨迹矩阵Q 固定,进行观测器矩阵Ao 、 Bo 、 Co 、 L 的设计.
定义如下矩阵,在决策变量中是仿射的,在不确定性θ 中为多仿射:
${{{\hat{S}}}_{\text{a}}}={{S}_{a}}+{{S}_{b}}K+{{S}_{lc}}$
N x ( θ ) = S x S x E x ( θ ) S l E z ( θ ) - S ^ a S ^ a
N π ( θ ) = 0 E π ( θ ) 0 - B ( θ ) K A ( θ ) + B ( θ ) K 0 0 E π ( θ ) 0 A ( θ )
定理1 假设存在2v = P 2 [ v ] P p [ v ] K T K 和适当维数的矩阵Sx 、Sa 、Sb 、Sl 、Slc 、S 2 π Spπ 使得下列LMIs对所有的v ∈ℓ 同时成立:
(9a) $\begin{matrix} & \text{diag}(P_{2}^{\left[ \text{v} \right]},0,{{K}^{T}}K-P_{2}^{\left[ \text{v} \right]},-\gamma _{2}^{2}Q)\prec \\ & {{\left( \left[ \begin{array}{*{35}{l}} I \\ 0 \\\end{array} \right]{{N}_{x}}\left( {{\theta }^{\left[ v \right]}} \right) \right)}^{\xi }}+{{\left( {{S}_{2 \pi }}{{N}_{\pi }}\left( {{\theta }^{\left[ v \right]}} \right) \right)}^{\xi }} \\ \end{matrix}$
(9b) $\begin{matrix} & \text{diag}(P_{p}^{\left[ \text{v} \right]},0,-P_{p}^{\left[ \text{v} \right]},-\gamma _{p}^{2}Q)\prec \\ & {{\left( \left[ \begin{array}{*{35}{l}} I \\ 0 \\\end{array} \right]{{N}_{x}}\left( {{\theta }^{\left[ v \right]}} \right) \right)}^{\xi }}+{{\left( {{S}_{\text{p }\!\!\pi }}{{N}_{\pi }}\left( {{\theta }^{\left[ v \right]}} \right) \right)}^{\xi }} \\ \end{matrix}$
那么,Ao =S x - 1 Sa , Bo =S x - 1 Sb , L =S x - 1 Sl , Co =S l - 1 Slc 定义了一个形式为式(8)的观测器,保证下列两个范数到范数和范数到峰值的特性:≤γ 2 W x 2 γp W x $\epsilon_{k}=Ke_{k}$ . 这些特性包括所有有界状态x 和所有不确定性θ ∈Θ.
证明 由于矩阵不等式的凸性和参数相关矩阵的多仿射性质,当且仅当上述公式中的θ [ v ] 被θ 取代,P 2 [ v ] P p [ v ] P 2 (θ )、 Pp (θ )后,相似公式对所有的θ ∈Θ 同时成立,故LMIs式(9a)和(9b)可行.同时,有Sa =Sx Ao , Sb =Sx Bo , Sl =Sx L , Slc =Sl Co ,这些变量替换后的LMIs为
(10) $\text{diag}({{P}_{2}}(\theta ),0,{{K}^{T}}K-{{P}_{2}}(\theta ),-\gamma _{2}^{2}Q)\prec {{({{S}_{2}}{{E}_{o}}(\theta ))}^{\xi }}$
(11) $\text{diag}({{P}_{p}}(\theta ),0,-{{P}_{p}}(\theta ),-\gamma _{p}^{2}Q)\prec {{\left( {{S}_{p}}{{E}_{o}}\left( \theta \right) \right)}^{\xi }}$
式中:S 2 = S x 0 | S 2 π S p = S x 0 | S p π . 通过向量ηo , k
(12) $\begin{gathered}\boldsymbol{e}_{k+1}^{\mathrm{T}} \boldsymbol{P}_2(\boldsymbol{\theta}) \boldsymbol{e}_{k+1}-\boldsymbol{e}_k^{\mathrm{T}} \boldsymbol{P}_2(\boldsymbol{\theta}) \boldsymbol{e}_k+ \\ \boldsymbol{\epsilon}_k^{\mathrm{T}} \boldsymbol{\epsilon}_k-\gamma_2^2 \boldsymbol{x}_k^{\mathrm{T}} \boldsymbol{Q} \boldsymbol{x}_k<0 \end{gathered}$
(13) ${{e}^{\text{T}}}_{\text{k}+1}{{P}_{p}}(\theta ){{e}_{k}}_{+1}-{{e}^{\text{T}}}_{k}{{P}_{p}}(\theta ){{e}_{k}}-\gamma _{p}^{2}{{x}^{\text{T}}}_{k}Q{{x}_{k}}<0$
由上述两式可知,系统是渐进稳定且满足≤γ 2 W x 2 γp W x 10 ].
3 闭环系统的稳定性分析
因分离原理不适用于不确定系统,故需首先考虑小增益定理,对整体观测状态反馈设计进行鲁棒稳定性分析.与文献[10 ]类似,W x 2 $\epsilon_{k}$ x ~ k Wxk 为输出的第1个系统的L 2 诱导范数小于1. 同时,定理1保证了以x ~ k $\epsilon_{k}$ L 2 诱导范数小于γ 2 . 根据小增益定理,如γ 2 <1,则闭环系统稳定. 由于上界对所有不确定性θ ∈Θ 都有效,所以稳定性是鲁棒的.
上述关于闭环稳定的理论是保守的,γ 2 ≥1时,闭环也可能是稳定的[10 ] .对具有观测状态反馈控制的闭环系统进行基于LMIs的鲁棒稳定性分析.
η T c , k = x ^ T k + 1 x T k + 1 z T k π T c 1 , k π T c 2 , k x ^ T k x T k w T k
E c (θ) = I 0 0 0 - L E z ( θ ) - A ^ o 0 0 0 I 0 E x ( θ ) 0 0 0 0 0 0 I E y ( θ ) 0 0 0 0 0 0 0 E π ( θ ) 0 B ( θ ) K A ( θ ) B w ( θ ) 0 0 0 0 E π ( θ ) 0 A ( θ ) 0
Ec (θ )ηc , k uk =K x ^ T k 10 ]的引理2和本文的引理1得到.
定理2 假设存在v = P c [ v ] Sc ,使得下列LMIs对所有v ∈ℓ 同时成立:
(14) $\text{diag}(P_{c}^{\left[ \text{v} \right]},I,0,0,-P_{c}^{\left[ \text{v} \right]},-\mu _{c}^{2}I)\prec {{\left( {{S}_{c}}{{E}_{c}}\left( {{\theta }^{\left[ v \right]}} \right) \right)}^{\xi }}$
则系统式(1)、式(7)和式(8)组成的闭环系统是鲁棒稳定的,所有θ ∈Θ ,其H ∞ 性能小于μc .
4 数值例子
${{x}_{k}}_{+1}=\left[ \begin{array}{*{35}{l}} -\theta _{1}^{2}/{{\theta }_{2}} & -{{\theta }_{1}} \\ 1 & 0 \\ \end{array} \right]{{x}_{k}}+\left[ \begin{array}{*{35}{l}} 0 \\ {{\theta }_{2}} \\ \end{array} \right]{{u}_{k}}+\left[ \begin{array}{*{35}{l}} {{\theta }_{1}} \\ 0 \\ \end{array} \right]{{w}_{k}}$
${{z}_{k}}=\left[ \begin{array}{*{35}{l}} 1 & 0 \\ \end{array} \right]{{x}_{k}}+{{\theta }_{2}}{{u}_{k}},{{y}_{k}}=\left[ \begin{array}{*{35}{l}} {{\theta }_{2}} & 0 \\ \end{array} \right]{{x}_{k}}$
${{E}_{x}}=\left[ \begin{array}{*{35}{l}} {{\theta }_{1}} & 0 \\ 0 & 1 \\ \end{array} \right],{{E}_{y}}=\left[ \begin{array}{*{35}{l}} 0 & 1 \\ \end{array} \right],{{E}_{z}}=\left[ \begin{array}{*{35}{l}} 0 & {{\theta }_{2}} \\ \end{array} \right]$
${{E}_{\pi }}=\left[ \begin{array}{*{35}{l}} {{\theta }_{2}} & 0 \\ 0 & 1 \\ \end{array} \right],A=\left[ \begin{array}{*{35}{l}} -{{\theta }_{1}} & -{{\theta }_{2}} \\ 1 & 0 \\ \end{array} \right]$
$B=\left[ \begin{array}{*{35}{l}} 0 \\ {{\theta }_{2}} \\ \end{array} \right],{{B}_{w}}=\left[ \begin{array}{*{35}{l}} {{\theta }_{2}} \\ 0 \\ \end{array} \right]$
其中不确定参数在标称值 1 附近,差异为δ 1 、 δ 2 的间隔内,即θ 1 ∈[1-δ 1 , 1+δ 1 ]和θ 2 ∈[1-δ 2 , 1+δ 2 ].δ 1 、 δ 2 表示参数变化的范围,是对现实中电阻(容、抗)、速度等不确定范围的数学简单描述.
本例目的是为上述含有不确定有理参数的不稳定开环系统设计一个观测状态反馈控制器,使其闭环系统稳定且满足一定性能.需特别指出的是,文献[10 ]中的方法仅适用于系统测量输出矩阵为常数不确定性系统,因此不能对上述不确定系统进行鲁棒状态反馈设计.
使用所提出的设计方案设计控制器.取不同差异和优化设置的结果如表1 所示.β 2 、 βp 分别为收敛速度和误差(受控输出)峰值加权,其中差异(δ 1 , δ 2 )=(0, 0)表示没有不确定. 当(δ 1 , δ 2 )=(0, 0) 时,取μd =10;其余取值时,最小化μd . 所有LMIs都通过YALMIP解析器[13 ] 构建并使用SDPT3求解器[14 ] 进行求解.
由表1 可知,不同差异和优化设置的结果可以得到不同的转移特性和H ∞ 性能μc ,证明测量输出矩阵含有不确定参数的不确定系统设计的程序确实有效.
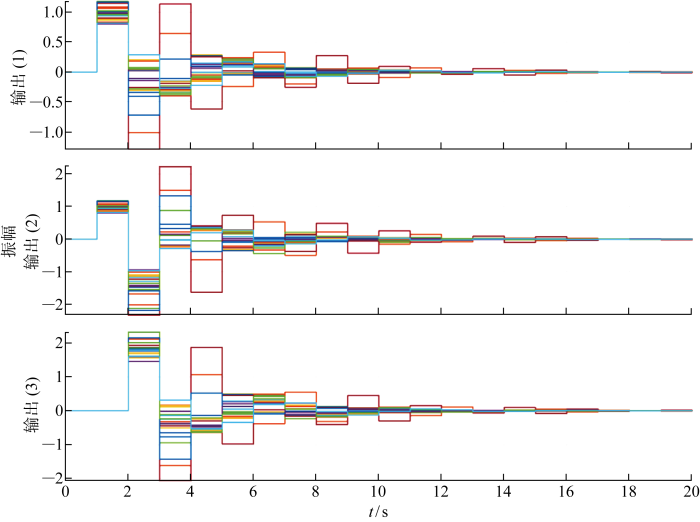
为直观表现控制效果,对δ 1 =δ 2 =0. 2, β 2 =1, βp =1进行测试,可得以下观测矩阵:
A o = - 0.434 - 0.909 0.650 1.031 B o = 0.869 - 0.612
C o = - 0.7723 - 1.0927 L = 0.525 - 0.828
得出含有鲁棒观测状态反馈控制的闭环冲激响应如图1 所示,其中,输出(1)是zk ,输出(2)、(3)是理想状态和观测状态之间的误差ek . 取20个随机选择的不确定性值得到冲激响应,可知不论是输出zk ,还是理想状态和观测状态之间的误差ek 都是收敛的,说明闭环系统呈渐进稳定趋势.
图1
图1
冲激响应
Fig.1
Impulse response
5 结语
提出一种基于新龙伯格类型观测器的鲁棒状态反馈设计方法.通过实验可知,此观测器适用于测量输出矩阵含有不确定参数的不确定系统模型.同时,基于此类型观测器结合DMAR和S 变量框架,提出数值可处理的与李亚普诺夫函数相关的LMIs条件.综上所述,提出的基于新龙伯格类型观测器的鲁棒观测状态反馈设计方法研究了更为一般的不确定性系统,可以得到与文献[10 ]中相似的结论.
参考文献
View Option
[1]
金鹏 , 马倩 , 周国鹏 . 负荷扰动互联电力系统模糊自适应输出跟踪与干扰抗御
[J]. 控制理论与应用 2021 , 38 (5 ): 571 -577 .
[本文引用: 1]
JIN Peng MA Qian ZHOU Guopeng . Fuzzy adaptive output tracking and disturbance rejection for interconnected power systems with load disturbance
[J]. Control Theory & Applications 2021 , 38 (5 ): 571 -577 .
[本文引用: 1]
[2]
陈龙胜 , 王琦 , 何国毅 . 非仿射纯反馈非线性切换系统自适应控制
[J]. 上海交通大学学报 2020 , 54 (9 ): 981 -986 .
DOI:10.16183/j.cnki.jsjtu.2020.137
[本文引用: 2]
针对一类单输入单输出的非仿射纯反馈非线性切换系统,研究了一种在任意切换下的自适应控制策略.首先,引入中值定理处理系统的非仿射特性问题,并利用径向基函数神经网络逼近系统的未知非线性动态.然后,采用 Nussbaum函数处理系统控制增益未知的问题,且在反演设计的每一步引入低通滤波器以解决“微分爆炸”问题.最后,基于共同Lyapunov函数设计状态反馈控制器,并分析闭环系统的稳定性.所设计的控制器避免了切换发生时控制参数跳变和调节参数过多的问题,减少了计算负荷,可以保证闭环系统所有信号半全局一致有界,且跟踪误差可收敛到原点的一个较小邻域.仿真结果验证了控制策略的有效性.
CHEN Longsheng WANG Qi HE Guoyi . Adaptive control of non-affine pure feedback nonlinear switching systems
[J]. Journal of Shanghai Jiao Tong University 2020 , 54 (9 ): 981 -986 .
[本文引用: 2]
[3]
陈刚 , 李志勇 . 集合约束下多智能体系统分布式固定时间优化控制
[J]. 自动化学报 2022 , 48 (9 ): 2254 -2264 .
[本文引用: 2]
CHEN Gang LI Zhiyong . Distributed fixed-time optimal control of multi-agent system with set constraints
[J]. Acta Automatica Sinica 2022 , 48 (9 ): 2254 -2264 .
[本文引用: 2]
[4]
LI Z J XIA Y Q WANG D H , et al Neural network-based control of networked trilateral teleoperation with geometrically unknown constraints
[J]. IEEE Transactions on Cybernetics 2016 , 46 (5 ): 1051 -1064 .
DOI:10.1109/TCYB.2015.2422785
PMID:25956001
[本文引用: 2]
Most studies on bilateral teleoperation assume known system kinematics and only consider dynamical uncertainties. However, many practical applications involve tasks with both kinematics and dynamics uncertainties. In this paper, trilateral teleoperation systems with dual-master-single-slave framework are investigated, where a single robotic manipulator constrained by an unknown geometrical environment is controlled by dual masters. The network delay in the teleoperation system is modeled as Markov chain-based stochastic delay, then asymmetric stochastic time-varying delays, kinematics and dynamics uncertainties are all considered in the force-motion control design. First, a unified dynamical model is introduced by incorporating unknown environmental constraints. Then, by exact identification of constraint Jacobian matrix, adaptive neural network approximation method is employed, and the motion/force synchronization with time delays are achieved without persistency of excitation condition. The neural networks and parameter adaptive mechanism are combined to deal with the system uncertainties and unknown kinematics. It is shown that the system is stable with the strict linear matrix inequality-based controllers. Finally, the extensive simulation experiment studies are provided to demonstrate the performance of the proposed approach.
[5]
SHANG W W XIE F ZHANG B , et al Adaptive cross-coupled control of cable-driven parallel robots with model uncertainties
[J]. IEEE Robotics and Automation Letters 2020 , 5 (3 ): 4110 -4117 .
DOI:10.1109/LSP.2016.
URL
[本文引用: 2]
[6]
GEROMEL J C KOROGUI R H BERNUSSOU J . H 2 and H ∞ robust output feedback control for continuous time polytopic systems
[J]. IET Control Theory Applications 2007 , 1 (5 ): 1541 -1549 .
DOI:10.1049/iet-cta:20060460
URL
[本文引用: 2]
[7]
GE S S LI Z J . Robust adaptive control for a class of MIMO nonlinear systems by state and output feedback
[J]. IEEE Transactions on Automatic Control 2014 , 59 (6 ): 1624 -1629 .
DOI:10.1109/TAC.9
URL
[本文引用: 2]
[8]
CHESI G . H 2 and H ∞ robust output feedback control for continuous time polytopic systems
[J]. IEEE Transactions on Automatic Control 2014 , 59 (6 ): 1618 -1623 .
DOI:10.1109/TAC.2013.2293453
URL
[本文引用: 3]
[9]
LIEN C H YU K W . LMI optimization approach on robustness and H ∞ control analysis for observer-based control of uncertain systems
[J]. Chaos , Solitons & Fractals 2008 , 36 (3 ): 617 -627 .
DOI:10.1016/j.chaos.2006.06.076
URL
[本文引用: 3]
[11]
PEREIRA R L DE OLIVEIRA M S . On robust stabilization of discrete-time LPV/LFR systems
[J]. IEEE Transactions on Automatic Control 2023 , 68 (1 ): 448 -453 .
DOI:10.1109/TAC.2022.3140255
URL
[本文引用: 1]
[13]
LOFBERG J . YALMIP: A toolbox for modeling and optimization in MATLAB
[C]// 2004 IEEE International Conference on Robotics and Automation Taipei, China : IEEE , 2004 : 284 -289 .
[本文引用: 1]
[14]
TOH K C TODD M J TÜTÜNCÜ R H . On the Implementation and usage of SDPT3-A Matlab software package for semidefinite-quadratic-linear programming, version 4.0 [M]//Handbook on semidefinite, conic and polynomial optimization. Boston, MA : Springer , 2012 : 715 -754 .
[本文引用: 1]
负荷扰动互联电力系统模糊自适应输出跟踪与干扰抗御
1
2021
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
Fuzzy adaptive output tracking and disturbance rejection for interconnected power systems with load disturbance
1
2021
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
非仿射纯反馈非线性切换系统自适应控制
2
2020
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... [2 ⇓ ⇓ -5 ],因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
Adaptive control of non-affine pure feedback nonlinear switching systems
2
2020
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... [2 ⇓ ⇓ -5 ],因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
集合约束下多智能体系统分布式固定时间优化控制
2
2022
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... ⇓ ⇓ -5 ],因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
Distributed fixed-time optimal control of multi-agent system with set constraints
2
2022
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... ⇓ ⇓ -5 ],因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
Neural network-based control of networked trilateral teleoperation with geometrically unknown constraints
2
2016
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... ⇓ -5 ],因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
Adaptive cross-coupled control of cable-driven parallel robots with model uncertainties
2
2020
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... -5 ],因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
H 2 and H ∞ robust output feedback control for continuous time polytopic systems
2
2007
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... 对不确定系统的反馈控制大致分为输出反馈控制和状态反馈控制两大类.输出反馈直接通过测量输出进行反馈以便于工程应用,得到许多研究者的青睐,文献[6 ]中提出一种关于多面体系统的H 2 和H ∞ 输出反馈控制方法,文献[8 ]中通过鲁棒稳定函数来实现鲁棒静态输出反馈控制器.这些控制方案大多应用二次稳定性的概念,只需线性矩阵不等式(LMI)在多面体的顶点上收敛,以保证系统稳定性.状态反馈在实践中状态变量难以测量,往往需要借助观测器,文献[9 ]中提出基于观测器不确定系统的鲁棒性LMI优化控制方法,能保证不确定系统的稳定性.但当涉及到不确定有理参数时,系统基于观测器的线性矩阵不等式组(LMIs)设计,大多为非凸的[7 ] 、保守的[9 ] 或需要计算和操纵特征多项式的参数相关系数[8 ] . ...
Robust adaptive control for a class of MIMO nonlinear systems by state and output feedback
2
2014
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... 对不确定系统的反馈控制大致分为输出反馈控制和状态反馈控制两大类.输出反馈直接通过测量输出进行反馈以便于工程应用,得到许多研究者的青睐,文献[6 ]中提出一种关于多面体系统的H 2 和H ∞ 输出反馈控制方法,文献[8 ]中通过鲁棒稳定函数来实现鲁棒静态输出反馈控制器.这些控制方案大多应用二次稳定性的概念,只需线性矩阵不等式(LMI)在多面体的顶点上收敛,以保证系统稳定性.状态反馈在实践中状态变量难以测量,往往需要借助观测器,文献[9 ]中提出基于观测器不确定系统的鲁棒性LMI优化控制方法,能保证不确定系统的稳定性.但当涉及到不确定有理参数时,系统基于观测器的线性矩阵不等式组(LMIs)设计,大多为非凸的[7 ] 、保守的[9 ] 或需要计算和操纵特征多项式的参数相关系数[8 ] . ...
H 2 and H ∞ robust output feedback control for continuous time polytopic systems
3
2014
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... 对不确定系统的反馈控制大致分为输出反馈控制和状态反馈控制两大类.输出反馈直接通过测量输出进行反馈以便于工程应用,得到许多研究者的青睐,文献[6 ]中提出一种关于多面体系统的H 2 和H ∞ 输出反馈控制方法,文献[8 ]中通过鲁棒稳定函数来实现鲁棒静态输出反馈控制器.这些控制方案大多应用二次稳定性的概念,只需线性矩阵不等式(LMI)在多面体的顶点上收敛,以保证系统稳定性.状态反馈在实践中状态变量难以测量,往往需要借助观测器,文献[9 ]中提出基于观测器不确定系统的鲁棒性LMI优化控制方法,能保证不确定系统的稳定性.但当涉及到不确定有理参数时,系统基于观测器的线性矩阵不等式组(LMIs)设计,大多为非凸的[7 ] 、保守的[9 ] 或需要计算和操纵特征多项式的参数相关系数[8 ] . ...
... [8 ]. ...
LMI optimization approach on robustness and H ∞ control analysis for observer-based control of uncertain systems
3
2008
... 许多物理系统包含固有不确定性,例如电力系统[1 ] 、切换系统[2 ] 、多智能体系统[3 ] 、机器人系统[4 -5 ] ,而不确定性会严重影响系统的稳定性和闭环系统性能[2 ⇓ ⇓ -5 ] ,因此对系统进行控制设计时有必要考虑其不确定性.为此,许多学者提出了不同的鲁棒控制设计方法,其中一种代表性设计思路是反馈控制[6 ⇓ ⇓ -9 ] . ...
... 对不确定系统的反馈控制大致分为输出反馈控制和状态反馈控制两大类.输出反馈直接通过测量输出进行反馈以便于工程应用,得到许多研究者的青睐,文献[6 ]中提出一种关于多面体系统的H 2 和H ∞ 输出反馈控制方法,文献[8 ]中通过鲁棒稳定函数来实现鲁棒静态输出反馈控制器.这些控制方案大多应用二次稳定性的概念,只需线性矩阵不等式(LMI)在多面体的顶点上收敛,以保证系统稳定性.状态反馈在实践中状态变量难以测量,往往需要借助观测器,文献[9 ]中提出基于观测器不确定系统的鲁棒性LMI优化控制方法,能保证不确定系统的稳定性.但当涉及到不确定有理参数时,系统基于观测器的线性矩阵不等式组(LMIs)设计,大多为非凸的[7 ] 、保守的[9 ] 或需要计算和操纵特征多项式的参数相关系数[8 ] . ...
... [9 ]或需要计算和操纵特征多项式的参数相关系数[8 ] . ...
Robust observed-state feedback design for discrete-time systems rational in the uncertainties
16
2017
... 为此,文献[10 ]中提出一种基于凸LMIs的启发式算法,其中详细描述的描述符多仿射表示(DMAR)和松弛变量(S )方法对不确定的有理参数具有效性.同时,基于多仿射的性质和S 变量的框架,可得到凸的LMIs及可行解.但当与测量输出相关的矩阵含有不确定参数时,其鲁棒反馈设计更为复杂.因鲁棒观测状态反馈设计需涉及观测器矩阵C 是一个待求参数,而不再是系统自身的测量输出矩阵,这使S 变量LMIs框架更加复杂,此问题仍是一个挑战[10 -11 ] . ...
... [10 -11 ]. ...
... 考虑如下不确定系统[10 ] : ...
... 式中:xk ∈Rn yk ∈Rp uk ∈Rm wk ∈Rv zk ∈Rq Ar (θ )∈Rn × n θ ), Br (θ )∈Rn × m θ ), Brw (θ )∈Rn × v θ ), Crz (θ )∈Rq × n θ ), Drzu (θ )∈Rq × m θ ), Drzw (θ )∈Rq × v θ ), Cry (θ )∈Rp × n θ )都是关于不确定参数θ 的有理矩阵. 假设参数θ 位于集合Θ 中,定义集合Θ 为 p - θ ∈Θ ={(θ 1 , …, θ p - ) ∈Θ 1 ×…× Θ p - θ 的 p - R m p . 假设每个集合Θp 是具有 v - p Vp 的顶点组成的多面体,Vp ={ θ p [ 1 ] θ p [ v - p ] .Θp 是顶点的凸组合,Θp =Co(Vp )={θp = ∑ v p = 1 v - p ξ p , v p θ p [ v p ] ξp ∈ Ξ v - p .V =V 1 ×…× V p - V 的一个通用元素将用θ [ v ] 表示,其中v =[v 1 … v p - ℓ 表示所有v 向量的集合[10 ] . 验证集合V 和ℓ 的基数为, v = = ∏ p = 1 p - v - p . ...
... 注1 文献[10 ]中仅考虑输出矩阵Cry (θ )为一个常数的情形,而本文中输出矩阵Cry (θ )是关于不确定参数θ 的有理多项式矩阵,文献[10 ]中的研究仅为本文的特例,并不能解决本文所面对的问题. ...
... 的有理多项式矩阵,文献[10 ]中的研究仅为本文的特例,并不能解决本文所面对的问题. ...
... 将式(4)中R (θ )表示为如下DMAR形式[10 ] : ...
... 注2 构建的新龙伯格类型的动态观测器与传统龙伯格类型观测器的不同在于传统观测器中的Co 直接来自于不确定系统的已知输出矩阵,为研究对象自身的测量输出矩阵[10 ,12 ] .由于本研究中的系统测量输出矩阵不确定,故新构建的龙伯格类型观测器中含有对测量输出进行估计的待求参数Co . ...
... 设计状态反馈增益K ,使其具有状态反馈uk =Kxk 的闭环系统,满足鲁棒稳定性和输入/输出H ∞ 性能. 设计K 的过程详见文献[10 ]的引理2和定理5. ...
... 进行观测器设计前,为保持动态尽可能相似,需对预期的状态轨迹进行估计.文献[10 ]定理6中,理想状态x 通过 W x 2 $\epsilon$ Wx 为观测状态轨迹,W =Q 1 / 2 . ...
... 由上述两式可知,系统是渐进稳定且满足≤γ 2 W x 2 γp W x 10 ]. ...
... 因分离原理不适用于不确定系统,故需首先考虑小增益定理,对整体观测状态反馈设计进行鲁棒稳定性分析.与文献[10 ]类似, W x 2 $\epsilon_{k}$ x ~ k Wxk 为输出的第1个系统的L 2 诱导范数小于1. 同时,定理1保证了以 x ~ k $\epsilon_{k}$ L 2 诱导范数小于γ 2 . 根据小增益定理,如γ 2 <1,则闭环系统稳定. 由于上界对所有不确定性θ ∈Θ 都有效,所以稳定性是鲁棒的. ...
... 上述关于闭环稳定的理论是保守的,γ 2 ≥1时,闭环也可能是稳定的[10 ] .对具有观测状态反馈控制的闭环系统进行基于LMIs的鲁棒稳定性分析. ...
... Ec (θ )ηc , k uk =K x ^ T k 10 ]的引理2和本文的引理1得到. ...
... 本例目的是为上述含有不确定有理参数的不稳定开环系统设计一个观测状态反馈控制器,使其闭环系统稳定且满足一定性能.需特别指出的是,文献[10 ]中的方法仅适用于系统测量输出矩阵为常数不确定性系统,因此不能对上述不确定系统进行鲁棒状态反馈设计. ...
... 提出一种基于新龙伯格类型观测器的鲁棒状态反馈设计方法.通过实验可知,此观测器适用于测量输出矩阵含有不确定参数的不确定系统模型.同时,基于此类型观测器结合DMAR和S 变量框架,提出数值可处理的与李亚普诺夫函数相关的LMIs条件.综上所述,提出的基于新龙伯格类型观测器的鲁棒观测状态反馈设计方法研究了更为一般的不确定性系统,可以得到与文献[10 ]中相似的结论. ...
On robust stabilization of discrete-time LPV/LFR systems
1
2023
... 为此,文献[10 ]中提出一种基于凸LMIs的启发式算法,其中详细描述的描述符多仿射表示(DMAR)和松弛变量(S )方法对不确定的有理参数具有效性.同时,基于多仿射的性质和S 变量的框架,可得到凸的LMIs及可行解.但当与测量输出相关的矩阵含有不确定参数时,其鲁棒反馈设计更为复杂.因鲁棒观测状态反馈设计需涉及观测器矩阵C 是一个待求参数,而不再是系统自身的测量输出矩阵,这使S 变量LMIs框架更加复杂,此问题仍是一个挑战[10 -11 ] . ...
An introduction to observers
1
1971
... 注2 构建的新龙伯格类型的动态观测器与传统龙伯格类型观测器的不同在于传统观测器中的Co 直接来自于不确定系统的已知输出矩阵,为研究对象自身的测量输出矩阵[10 ,12 ] .由于本研究中的系统测量输出矩阵不确定,故新构建的龙伯格类型观测器中含有对测量输出进行估计的待求参数Co . ...
YALMIP: A toolbox for modeling and optimization in MATLAB
1
2004
... 使用所提出的设计方案设计控制器.取不同差异和优化设置的结果如表1 所示.β 2 、 βp 分别为收敛速度和误差(受控输出)峰值加权,其中差异(δ 1 , δ 2 )=(0, 0)表示没有不确定. 当(δ 1 , δ 2 )=(0, 0) 时,取μd =10;其余取值时,最小化μd . 所有LMIs都通过YALMIP解析器[13 ] 构建并使用SDPT3求解器[14 ] 进行求解. ...
1
2012
... 使用所提出的设计方案设计控制器.取不同差异和优化设置的结果如表1 所示.β 2 、 βp 分别为收敛速度和误差(受控输出)峰值加权,其中差异(δ 1 , δ 2 )=(0, 0)表示没有不确定. 当(δ 1 , δ 2 )=(0, 0) 时,取μd =10;其余取值时,最小化μd . 所有LMIs都通过YALMIP解析器[13 ] 构建并使用SDPT3求解器[14 ] 进行求解. ...




{kind=link}
{kind=link}