

高性能人机界面具有标准化、易于使用和更高效的特征,可以使作业人员安全有效地完成监视和操作任务[1].较早开展人机界面研究的是1973年英国的一个研究机构,该机构开发了控制界面布局设计程序CAPABLE[2].1993年龙升照[3]系统地讨论了人-机-环境系统工程并应用于人机界面布局.进入21世纪后,各种人机界面研究蓬勃发展.在船海领域关于人机界面的研究以一维的布局优先序研究较多,如王帅旗[4]通过蚁群算法开展了工作站布局优化,人机设计与评价交互进行;马雨薇[5]考虑人体工程学因素,开发了舰桥导航设备的优化布局.陈登凯等[6]研究了包括显控装置在内的潜水器工作舱布局设计方法.最新的人机界面研究已步入智能化设计阶段:Hartman等[7]研究了智能轮椅上人机界面的交互与控制;Deng等[8-9]基于认知心理学理论,对钻机控制室的人机界面进行了优化设计,并进行了视觉美学相关研究;Lu等[10]基于多维感知研究了自动驾驶汽车的界面设计;Hao等[11]将机器视觉技术应用于人机界面的布局设计.新技术的诞生和日渐复杂化的工作流程都在推动船舶人机界面达到更高的性能水平.然而,目前国内关于船舶人机工效设计的规范与国外相比较为落后,舰船人-机-环系统工程缺乏完善的理论体系和模型化方法[12].因此,有必要开展人机界面布局优化研究,建立船舶驾驶室高性能人机界面设计方法.
目前关于人机界面布局问题的研究多数以提高界面空间、材料的利用率以及降低成本为核心,而鲜有在人机界面的布局设计中考虑人的身体特征、认知规律和心理特性等需求[13].另外,对人机界面的设计评估多以定性分析为主,或者以某单一因素为研究对象,缺乏系统的定量研究.因此,从人机工效的角度对驾驶室工作站人机界面的布局进行优化与评估具有非常重要的意义.本文在设计初期将人因工程学理论融入优化数学模型,使布局设计更加科学合理的同时,也能极大地提高优化设计的效率.
以船舶驾驶室工作站人机界面的布局优化设计为目标,以控制面板为研究对象,构建了人机界面二维布局优化模型,将人因工程学准则量化分析后与优化模型相结合,采用差分进化算法和粒子群算法进行优化迭代.对最终获取的优化布局方案进行虚拟仿真评价.本文提出的布局优化方法,适用于不同船型、操作方式、人体差异下各工作站面板的布局设计,可为提高船舶驾驶室工作站人机界面的布局设计效率、合理性、作业人员的工作效率和舒适度提供支撑.
1 人机界面布局优化的问题描述和数学建模
1.1 问题描述和相关假设
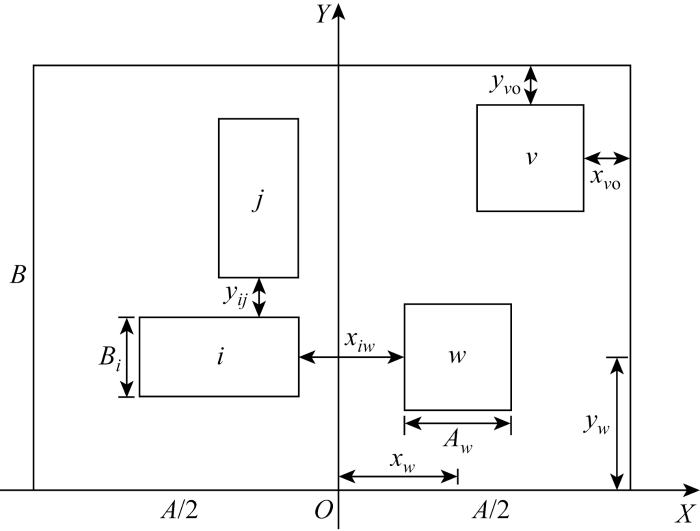
主要研究控制面板的布局优化问题.对于工作站面板的布局优化设计应当在驾驶室设计、工作站设计与布置、各显控装置设计已经完成并且合理合规的基础上进行.根据规范以及现有的工作站面板形式,假定工作站面板和待布局的装置为矩形结构,装置四边与面板四边平行,原点定义为作业人员位置,如图1所示.图中:
图1
1.2 布局准则和人因工程学准则
结合国内外规范中的显控装置布局准则和人因工程学准则,船舶驾驶室工作站面板布局应当重点考虑以下原则.
(1) 功能分组原则.相同功能的元件应当进行集成化设计.
(2) 重要性原则.重要性高的装置应当布置在最优、最易观察或操作的位置.
(3) 使用频率原则.使用频率越高的装置应当布置在操作舒适度越高的位置.
(4) 顺序原则.在进行布局排列时,在各项任务中优先使用的装置应当靠左和靠上进行布置.
(5) 相关性原则.相关性越高的装置应当靠的更近.
(6) 空间相容原则.装置之间、装置与面板边界应当按照保留一定的间距.
1.3 布局优化数学模型
1.3.1 目标函数
分别建立重要性原则、使用频率原则、顺序原则和相关性原则4个子目标函数.定义待布局装置数量为n,船舶作业任务有k项.
(1) 重要性子目标函数:
式中:
Pi越大,表示装置i的重要性越高.应当由多位有经验的专家对不同装置的重要性进行协同打分,将各专家的评分取均值,作为各装置的重要性评分pi.分值为1~5分,分别表示绝对不重要、比较不重要、中等重要、比较重要和绝对重要.Pi的计算公式如下:
(2) 使用频率子目标函数:
式中:
IACS Rec.95[16]对不同工作站和不同任务下对各装置的使用情况进行了说明.
(3) 使用顺序子目标函数:
式中:$S_{i}$为装置$i$的顺序权值.
Si体现待布局装置的使用优先度,
式中:$s_{i}$为装置$i$的顺序均值,
(4) 相关性子目标函数:
式中:
(5) 子目标函数均已为无量纲函数,采用加权平均法将4个子目标函数合成为总目标函数:
式中:
1.3.2 约束条件
根据空间相容性原则构建约束条件如下.
(1) 边界约束.装置不应超出面板边界,并且应当与面板边界保持一定间距.
(2) 间距约束.装置不能发生重叠,且装置间应当保持一定间距.GB/T 14775—1993[17]中规定了控制装置的允许间隔距离和最佳间隔距离.
当式(12)或(13)满足条件时,装置i和j满足间距约束.
2 人机交互虚拟仿真和布局优化算法
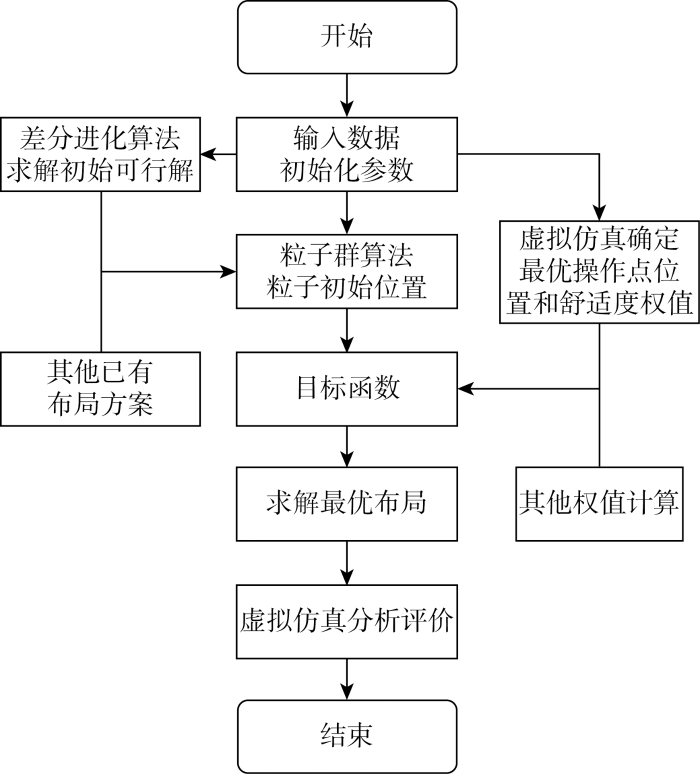
工作站人机界面布局优化流程如图2所示,通过虚拟仿真确定人机界面的最优操作点位置和各区域的舒适度权值;采用差分进化算法获取粒子初始位置;通过粒子群算法进行优化迭代计算获得最优布局解;最后再通过虚拟仿真验证布局合理性.
图2
2.1 虚拟仿真
通过虚拟仿真来获取待布局工作站面板的最优操作点位置以及各区域舒适度权值,使用 Delmia 软件进行人因工程学虚拟仿真.
2.1.1 建立人体和工作站虚拟模型
基于Human Builder模块建立不同百分位数的三维人体模型,并定义相应的操作姿态.将待优化的工作站面板模型(文件格式为.stl)导入仿真系统.
2.1.2 快速上肢评估与面板各区域舒适度权值划分
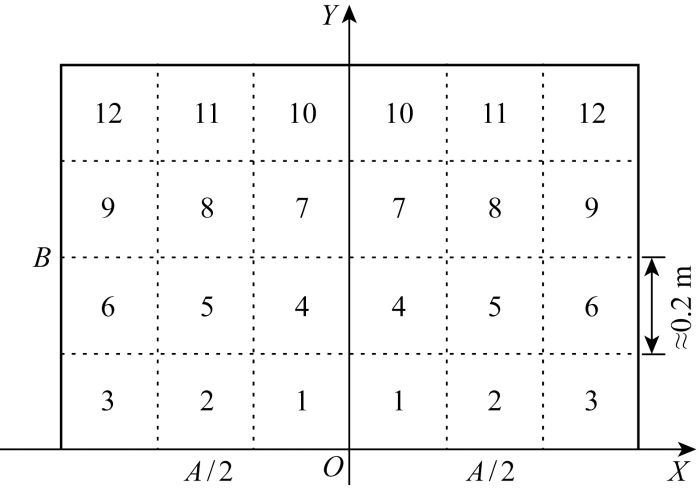
当前各规范中对工作站面板的各区域舒适度与可达性仅有简单的描述和划分.为了对各区域舒适度进行量化分析,对待布局面板进行网格划分,并对人体手部触及各网格中心点时的姿势进行RULA分析.兼顾RULA评分精度和区域划分要求,采用长、宽为0.2 m左右的网格,网格对称分布,如图3所示.在Human Activity Analysis模块中获取作业人员在操作不同面板区域时各部位的RULA评分,将各部位的RULA评分相加,得到网格i的RULA总分
图3
2.1.3 姿态分析与最优操作点位置
MSC/Circ.982[19]中规定最重要的装置应当布置在最优、最易触及的位置,最优操作点位置的确定仍是一项难题.本文认为最优操作点为作业人员在最优作业姿态下,最易触及的工作站面板位置,该点也为整个面板操作舒适度最高的位置.为了准确获得该点位置,需要进行相比RULA分析参数更多、结果更精细的姿态分析.在Human Posture Analysis模块中对人体各部位设定角度界限与首选角度.为简化评估过程,对人体模型各部位首选角度按照3个等级进行划分,如表2所示.其中,可达域的上下边界为角度界限.接下来使用查找最优姿态功能,人体模型自动调整为最优姿态.可通过RULA分析验证当前姿态是否为舒适度最高姿态.再通过最少的调整使人体模型以更高的姿态评估分数接触到工作站面板,接触点为最优操作点.
表2 首选角度等级表
Tab.2
| 角度区域 | 分值 | 舒适度 |
|---|---|---|
| 舒适域 | 100 | 非常舒适 |
| 可作业域 | 80 | 较舒适不易疲劳 |
| 可达域 | 60 | 不舒适易疲劳 |
2.1.4 虚拟仿真分析评价
在完成优化求解得到优化布局结果后,对布局结果再次进行虚拟仿真,验证其可视性、可达性与舒适度,提出改进意见.
2.2 粒子群优化算法
2.3 差分进化算法求解初始位置
3 算例研究
3.1 参数确定与虚拟仿真
工作站和人机模型如图4所示.以国产化大型远洋客船H1508的导航与操纵工作站(型号:YA/865-SECT.E)的大面积控制面板作为算例进行布局优化设计,如图4(a)所示.首先确定工作站操作方式、尺寸、待布局装置数量、各装置尺寸、各项权值以及人体模型各部位首选角度.该控制面板长度A=1.416 m、宽度B=0.938 m.面板上各装置以按功能分组原则进行分组,分组与命名参考规范IACS Rec.95[16]和MSC/Circ.982[19],分组后待布局装置的编号、尺寸和初始坐标如表3所示,各装置的重要性权值、使用频率权值、顺序权值和相关性权值采用1.3.1节中的方法进行计算,其中涉及主观评价的数据参考文献[4].
图4

表3 装置编号、尺寸和初始坐标
Tab.3
| 装置 | 编号 | Ai/m | Bi/m | xi/m | yi/m |
|---|---|---|---|---|---|
| 按钮功能组1 | 1 | 0.375 | 0.375 | -0.50 | 0.70 |
| 信号指示1 | 2 | 0.349 | 0.185 | -0.06 | 0.82 |
| 信号指示2 | 3 | 0.349 | 0.185 | 0.33 | 0.82 |
| 按钮功能组2 | 4 | 0.128 | 0.488 | 0.62 | 0.68 |
| 摇杆1 | 5 | 0.128 | 0.203 | -0.07 | 0.57 |
| 推拉杆1 | 6 | 0.257 | 0.203 | 0.19 | 0.57 |
| 按钮功能组3 | 7 | 0.375 | 0.375 | -0.50 | 0.25 |
| 推拉杆2 | 8 | 0.257 | 0.203 | -0.08 | 0.17 |
| 电话 | 9 | 0.105 | 0.302 | 0.30 | 0.17 |
| 摇杆2 | 10 | 0.128 | 0.203 | 0.47 | 0.12 |
| 摇杆3 | 11 | 0.128 | 0.203 | 0.62 | 0.12 |
表4 第95百分位舒适度权值
Tab.4
| 参数 | 网格1 | 网格2 | 网格3 | 网格4 | 网格5 | 网格6 | 网格7 | 网格8 | 网格9 | 网格10 | 网格11 | 网格12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ci | 0.13 | 0.13 | 0.10 | 0.09 | 0.08 | 0.08 | 0.07 | 0.07 | 0.06 | 0.07 | 0.06 | 0.06 |
| Ci | 1.00 | 1.00 | 0.67 | 0.44 | 0.33 | 0.33 | 0.22 | 0.22 | 0.11 | 0.22 | 0.11 | 0.00 |
图5

3.2 差分进化算法求解初始解
表5 初始可行解
Tab.5
| 坐标 | 装置1 | 装置2 | 装置3 | 装置4 | 装置5 | 装置6 | 装置7 | 装置8 | 装置9 | 装置10 | 装置11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| x | -0.06 | -0.23 | 0.32 | 0.59 | 0.40 | 0.20 | -0.49 | -0.56 | 0.62 | -0.06 | 0.22 |
| y | 0.73 | 0.11 | 0.37 | 0.28 | 0.75 | 0.12 | 0.68 | 0.12 | 0.75 | 0.33 | 0.80 |
3.3 粒子群算法求解最优布局
读取初始可行解,合理设置种群个数、空间维数和最大迭代次数使得算法能够快速收敛.设置粒子个数为 2 000,空间维数为22,最大迭代次数为500.采用目前较为常用的线性递减惯性权重,设置最小惯性权重为0.6,最大惯性权重为1.经过多次计算验证,速度下界为-0.5,速度上界为0.5,自我学习因子为0.4,群体学习因子为0.6时,可高效获得最优布局解.文献[4]中在认为子目标同等重要时, 设置相同的子目标权值.本算例中认为4个子目标同等重要,考虑到式(11),因此4个子目标权值都取为0.25.粒子群算法迭代过程如图6所示.多次求解得最优布局方案如图7所示,各装置编号与图4(a)相同.对应的最优布局解坐标如表6所示.
图6
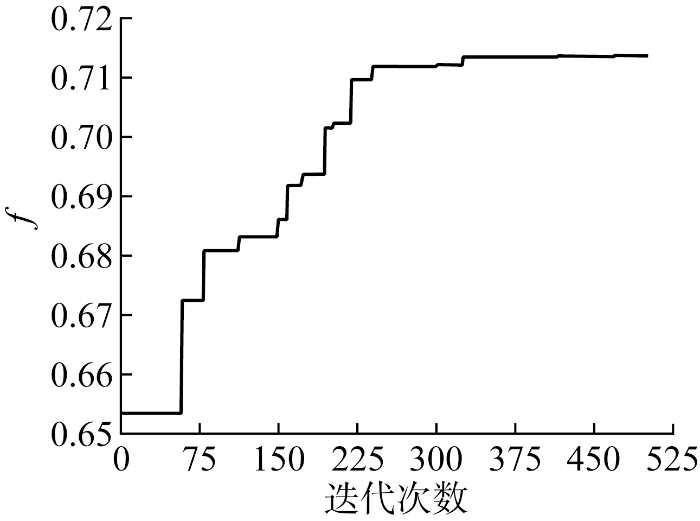
图7
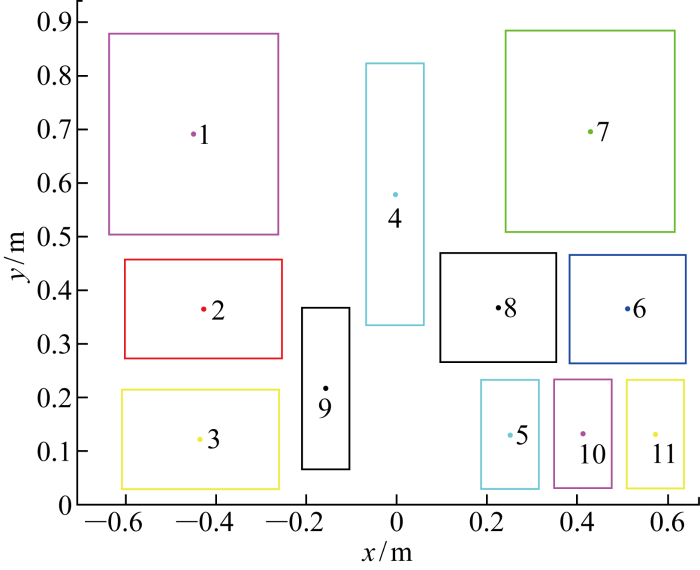
表6 最优布局解
Tab.6
| 坐标 | 装置1 | 装置2 | 装置3 | 装置4 | 装置5 | 装置6 | 装置7 | 装置8 | 装置9 | 装置10 | 装置11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| x | -0.45 | -0.43 | -0.44 | 0.00 | 0.25 | 0.51 | 0.43 | 0.22 | -0.16 | 0.41 | 0.57 |
| y | 0.69 | 0.37 | 0.12 | 0.58 | 0.13 | 0.36 | 0.70 | 0.37 | 0.21 | 0.13 | 0.13 |
3.4 人体模型参数差异对比
对于人机界面的优化设计,人体尺寸数据是人因分析的重要输入,影响不可忽略[26].选取与第95百分位差异较大的第5百分位人体数据进行对比试验,探讨人体参数变化对人机界面布局优化设计的影响.构建第5百分位的人体模型,与人体参数无关的其他参数与前文第95百分位的人体模型算例保持一致.
通过RULA分析,得到面板网格1~12的Ci分别为1.00,1.00,0.79,0.69,0.39,0.29,0.29,0.29,0.19,0.09,0.09,0.00.人体模型各部位首选角度不变,进一步通过姿态分析确定此时的最优操作点坐标为(±0.3 m, 0.155 m).对比表4和表7可知,相比第95百分位,第5百分位下原本舒适度较高的区域舒适度进一步提高,而原本舒适度较低的区域舒适度进一步降低.但面板各区域的相对舒适度关系没有变化,且最优操作点位置也仅略有改变.进一步求解得第5百分位最优布局方案如图8所示.对比图7和图8,仅各装置略有小幅度位移,而相对位置关系没有变化.因此,在本算例中,人体参数在合理范围内的改变对布局设计的结果影响很小.
表7 目标函数对比
Tab.7
| 目标函数值 | 初始设计方案 | 优化后设计方案 | 提升/% |
|---|---|---|---|
| f1 | 0.710 | 0.771 | 8.6 |
| f2 | 0.492 | 0.592 | 20.3 |
| f3 | 0.719 | 0.847 | 17.9 |
| f4 | 0.531 | 0.644 | 21.4 |
| f | 0.613 | 0.714 | 17.0 |
图8

3.5 虚拟仿真评价
考虑到本算例中,人体参数的改变对布局优化结果影响较小,因此使用Delmia软件对第95百分位人体参数下的最优布局方案开展人机交互虚拟仿真与评价.
3.5.1 可视性分析
图9

3.5.2 可达性分析
图10
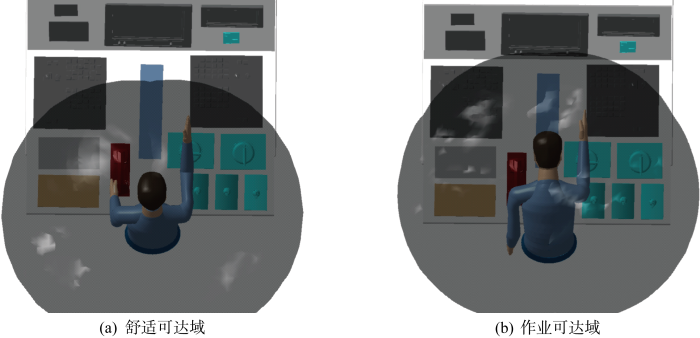
当前布局下,63.6%的装置在舒适可达域内,重要性和使用频率较高的装置也都在舒适可达域内,且所有装置都在作业可达域内.采用孙守迁等[29]提出的可达性评价方法:
式中:E为可达性评分;Z为最远可达距离.
评价结果E在[0,1]间,当E<0.5时,认为系统可达性可行.对于当前布局,在站姿操作下Z为0.8 m,E=0.35.若限制到舒适可达域,Z取0.6 m时,E=0.47,可认为当前布局满足可达性要求.若该控制面板采用坐姿操作,则Z=0.4 m,E=0.70,可达性较差.若控制面板宽度较大,则不适合采用坐姿操作.
3.5.3 舒适度分析
初始设计方案和优化后设计方案的4个子目标函数值如表7所示.相比初始方案,优化后的布局方案更好地满足了所有子目标原则.其中,使用顺序原则和相关性原则子目标函数的提升,表明优化后的布局方案提升了工作效率,降低了操作失误率.而使用频率原则子目标函数最能体现布局方案的舒适度,优化后的布局方案舒适度提升显著.总目标函数体现布局方案的合理性,依据式(10),在各子目标权重相同时,布局合理性提升了17.0%.
4 结论
(1) 以船舶驾驶室工作站的人机界面为研究对象,通过虚拟仿真将人的身体特征、认知规律和姿态舒适度量化并融入目标函数,建立了对重要性、使用频率、使用顺序与相关性这4个指标的布局优化数学模型.借助差分进化算法丰富了初始种群多样性,并采用粒子群优化算法高效地获得了最优布局方案,布局合理性提升了17.0%.
(2) 通过Delmia虚拟仿真模拟作业人员的实际操作姿态,验证了现有控制面板能够满足可视性和可达性两个基本需求,且优化后的布局方案提升了作业人员的操作舒适度和工作效率.通过虚拟仿真可以对作业人员姿态进行定性校核和定量评价,为人机界面的人机性能研究提供理论依据.
(3) 本文提出的布局优化方法可移植性强,通过建立不同场景下的各项权值、操作舒适度、最优操作点位置等数据库,结合适度的人工输入以满足实际场景需求,本研究可以为实现智能化人机界面的高效自动布局提供支撑.
参考文献
CAPABLE A Computer program to layout controls and panels
[J].DOI:10.1080/00140137708931629 URL [本文引用: 1]
人-机-环境系统工程理论及其在生产力发展中的意义
[C]//
Human-machine-environment system engineering theory and its significance in productivity development
[C]//
基于人因工程学的训练舰舰桥布局优化设计与分析
[J].
An ergonomic approach for optimized layout of training ship’s bridge
[J].
舱内功能及人机工效导向的载人潜水器工作舱布局设计方法
[J].
Manned submersible working cabin layout design method under cabin function system constraints and ergonomic constraints
[J].
Human-machine interface for a smart wheelchair
[J].
Layout design of human-machine interaction interface of cabin based on cognitive ergonomics and GA-ACA
[J].
Quantitative evaluation of visual aesthetics of human-machine interaction interface layout
[J].
Design of human-machine interaction interface for autonomous vehicles based on multidimensional perceptual context
[J].
Human-machine interface visual communication design model of electronic equipment using machine vision technology
[J].
舰船人-机-环系统工程研究综述
[J].
A review of warship man-machine-environment system engineering
[J].
基于知识工程的船舶机舱设备三维布局设计
[J].
Design of three-dimensional layout of ship engine room equipment based on knowledge based engineering
[J].
Multimaterial layout optimization of truss structures via an improved particle swarm optimization algorithm
[J].DOI:10.1016/j.compstruc.2019.06.004 URL [本文引用: 1]
基于代理模型的三立柱半潜平台多目标优化
[J].
Multi-objective optimization of three-column semi-submersible platforms based on surrogate models
[J].
基于粒子群优化算法的车间布局设计
[J].
Facility layout design based on particle swarm optimization
[J].
Wave energy converter optimization based on differential evolution algorithm
[J].
基于改进粒子群算法的凹多边形食堂布局优化
[J].
Layout optimization of concave polygon canteen based on improved particle swarm optimization algorithm
[J].
基于CATIA的舰载显控台人机工程研究
[J].
Ergonomics research of shipborne console based on CATIA
[J].
核电厂主控制室人因分析中的人体尺寸修正
[J].
Modification of human body size in human factor analysis of main control room of nuclear power plant
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}