随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点.
在目前估算SOC的方法中,扩展卡尔曼滤波(extended Kalman filter,EKF)算法在保持较高锂离子电池估算精度的前提下更易实现,是目前SOC估算中研究较多的方法[6 ⇓ -8 ] .然而,在电动汽车SOC估算过程中,电池实际驾驶工况以及电池本身的老化过程给传统卡尔曼滤波算法的准确性带来巨大挑战.
首先,电动汽车驾驶工况复杂多变是造成系统噪声不稳定的重要原因之一,而使用EKF估算锂离子电池SOC时认为系统的噪声为高斯白噪声,这与实际驾驶工况不相符,会导致较大的估算误差.杨帆等[9 ] 提出一种无迹卡尔曼滤波(unscented Kalman filter,UKF)与反向传播(back propagation,BP)神经网络结合的联合算法,在UKF估算电池SOC基础上,采用BP神经网络预测不同噪声下UKF算法滤波的误差,再将预测出的误差从UKF估算结果中去除.He等[10 ] 根据测量值与估算值之间的差值来自适应调整系统的噪声,建立自适应扩展卡尔曼滤波算法(adaptive extended Kalman filter,AEKF)改善由于噪声值变化引起的估算误差大和发散等问题,在联邦城市行驶工况(federal urban driving schedule,FUDS)下验证了算法准确度,但缺少其他工况下的验证,因此算法的普适性有待商榷.
其次,EKF是基于模型的算法,锂离子电池老化过程中模型参数会发生明显变化,进而造成SOC估算准确性大幅下降.为减小由于模型参数不准确而导致的估算误差,陈玉珊等[11 ] 采用含遗忘因子的递推最小二乘算法实时估计电池模型参数.杜帮华等[12 ] 提出可变遗忘因子的递推最小二乘法,通过不断更新遗忘因子更好地实时跟踪电池特性.Xiong等[13 ] 提出多尺度扩展卡尔曼滤波即利用宏观尺度估计电池模型参数,利用微观尺度估计电池SOC.但在现有研究中,同时考虑锂离子电池模型参数变化与噪声调整的研究较少.
考虑到动力电池实际工作情况,将驾驶工况和电池老化两种变量结合研究更加符合客观规律.采用自适应双扩展卡尔曼滤波算法(adaptive dual extended Kalman filter,ADEKF),即在EKF算法的基础上通过极大似然估计准则,设计自适应算法,对系统噪声中的过程噪声协方差进行自适应调整,形成AEKF算法,有效地适应不同工况条件;采用单独的卡尔曼滤波(Kalman filter,KF)算法对模型参数中的欧姆内阻进行动态估算,并将之与AEKF算法结合起来形成ADEKF算法,可以在估算电池SOC的同时,实时估算电池模型参数,解决电池老化造成的模型参数不准确问题,进一步提高估算的精度.随后,在恒流工况、动态应力测试工况(dynamic stress test,DST)和北京公交车动态应力测试工况(Beijing dynamic stress test,BBDST)3种工况条件下采用该联合算法开展不同老化程度锂离子电池SOC估算实验,证明该方法的准确性和普适性.
1 锂离子电池等效电路模型及其参数辨识
1.1 等效电路模型
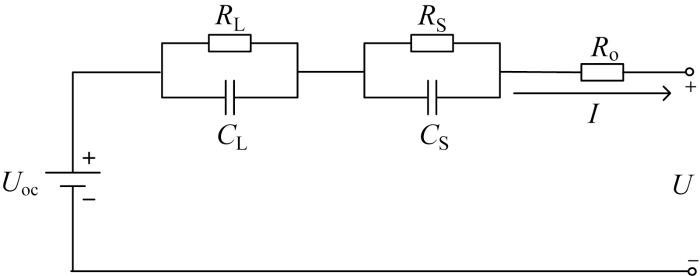
用于SOC估算的锂离子电池模型主要可分为电化学模型和等效电路模型[14 ] .电化学模型过于复杂,不适用于电池仿真和控制[15 ] .常见的等效电路模型包括Rint模型、新一代汽车协商会模型、一阶RC模型以及二阶RC模型等,采用精度较高且易建立的二阶RC模型[16 -17 ] 用于SOC估算,该模型的电路结构如图1 所示.图中:U 为电池的端电压;I 为电池的工作电流;R o 为电池欧姆内阻;R L 、C L 分别为电池的电化学极化电阻和电容;R S 、C S 分别为电池的浓度差极化电阻和电容;U oc 为电池的开路电压(open circuit voltage,OCV).
图1
图1
锂离子电池等效电路模型
Fig.1
Equivalent circuit model of lithium-ion battery
(1) ξSOC (t)=ξSOC (t0 )- 1 3600 C N ∫ t 0 t
式中:ξ SOC 为荷电状态;ξ SOC (t )为电池在t 时刻的SOC值;ξ SOC (t 0 )为电池在t 0 时刻的SOC值;C N 为锂离子电池的初始容量.
(2) C S d U S d t = I - U S R S C L d U L d t = I - U L R L U = U o c - U S - U L - R o I
式中:U S 为R S 两端的电压;U L 为R L 两端的电压.
令τ S =R S C S ,τ L = R L C L ,表征电池极化过程的时间常数;将ξ SOC 、U S 、U L 作为状态变量,I 作为输入变量,进行离散化处理,最终可得关于SOC的状态空间方程:
(3) ξ S O C ( k ) U S ( k ) U L ( k ) 1 0 0 0 e - Δ T τ S ( k ) 0 0 0 e - Δ T τ L ( k ) ξ S O C ( k - 1 ) U S ( k - 1 ) U L ( k - 1 ) - Δ T 3600 C N R S ( k ) ( 1 - e - Δ T τ S ( k ) ) R L ( k ) ( 1 - e - Δ T τ L ( k ) )
(4) U (k )=U oc (ξ SOC (k ))-U S (k )-U L (k )-R o (k )I (k )
1.2 老化锂离子电池的开路电压与SOC的关系
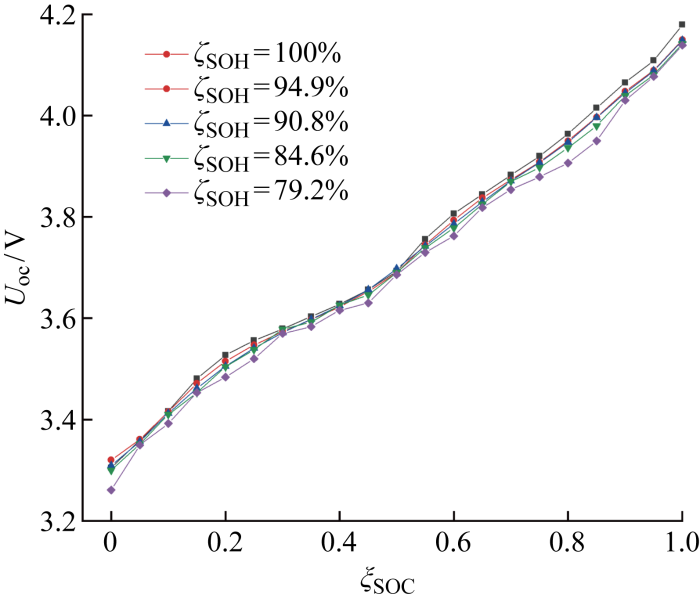
实验在室温25 ℃下进行,实验平台为蓝电CT2001B电池测试仪,实验对象为日本松下公司生产的额定容量为3.4 A·h的NCR18650B型三元锂离子电池.为了获得不同老化程度的锂离子电池样品,以0.5C倍率电流对4个同批次的电池进行老化实验[18 ] ,得到健康状态(State of Health,ζ SOH )分别为94.9%、90.8%、84.6%和79.2%的老化电池并与新电池(ζ SOH =100%)组成本文实验样品组.
为获得不同老化程度锂离子电池的SOC-OCV曲线,以实际测得的电池实际容量为基准,用0.5C倍率分别对样品组中的5个电池进行脉冲放电实验[19 ] :①将电池充满电后静置3 h获得电池ξ SOC =100%时的开路电压;②以0.5C电流放出电池5%的电量并静置获得对应SOC下的开路电压;③重复步骤①~②直到将电池电量放完.
由此得到随着SOC减小开路电压的变化.对得到的SOC-OCV曲线进行9阶多项式拟合,实测数据和多项式拟合结果如图2 所示.
图2
图2
不同老化程度锂离子电池SOC-OCV放电曲线
Fig.2
Curves of lithium-ion battery SOC-OCV discharge at different aged levels
1.3 老化电池模型参数初始值辨识
电池模型建立后,需对模型中的参数进行初步离线辨识.采用最小二乘参数拟合法分别处理样品组中5个电池脉冲放电后的锂离子电池电压静置恢复曲线,结合电池二阶RC模型,获得各电池不同SOC值处模型的参数值,形成不同SOC值与电池参数的对应表.通过查表就可得到不同SOC值对应的5个等效电路模型参数值R o 、R L 、C L 、R S 、C S .对于不在表中的SOC值,选择其临近的右侧值来代替.
2 基于卡尔曼滤波的SOC估计算法
由于电动汽车驾驶工况随机多变、电池老化等因素会造成SOC估算过程中系统噪声设置不合理、模型参数不准确的问题,所以在EKF的基础上自适应动态调整噪声协方差并采用KF实时调整电池模型参数.
2.1 自适应扩展卡尔曼滤波算法估算电池SOC
AEKF算法是针对EKF算法中将系统噪声假定为确定值与实际不相符的问题提出的改进算法,由EKF算法和自适应调整噪声协方差两部分组成.
2.1.1 EKF算法
(5) x k + 1 = f ( x k , u k ) + w k y k = g ( x k , u k ) + v k
式中:f 为状态方程;g 为观测方程;xk 为状态变量;uk 为输入变量;yk 为观测变量;wk 为系统的过程噪声;vk 为系统的量测噪声.
EKF算法将过程噪声wk 与量测噪声vk 均假设为高斯白噪声,服从以下分布:
(6) P ( w k ) ~ N ( 0 , Q ) P ( v k ) ~ N ( 0 , R )
式中:P 表示概率;N 为高斯分布;Q 为过程噪声协方差;R 为量测噪声协方差.
(1) 将非线性化系统线性化处理,对非线性系统进行一阶泰勒展开,具体如下:
Ak -1 =d f ( x k - 1 , u k ) d x k - 1 x ^ k - 1
Ck =d g ( x k / k - 1 , u k ) d x k / k - 1 x ^ k / k - 1
其中Ak 为状态转移矩阵;Ck 为观测矩阵;k/k -1表示系统上一时刻对k 时刻的估计量; ^ 表示相应变量的预测值.
(7) x ^ 0 = E ( x 0 ) P 0 = E ( ( x 0 - x ^ 0 ) ( x 0 - x ^ 0 ) T )
式中:x ^ 0 x 0 为状态变量;E 为求期望;P 0 为状态误差协方差的初值.
(3) 时间更新,由前一时刻的状态和误差协方差得到当前时刻状态量的先验估计和误差协方差
(8) x ^ k / k - 1 x ^ k - 1 k )
(9) Pk/k -1 =Ak -1 Pk -1 A T k - 1
(4) 量测更新,由卡尔曼滤波增益和量测值修正状态量的先验估计得到状态量的后验估计,更新误差协方差,为下一次递推做准备
(10) Kk =Pk/k -1 C T k k Pk/k -1 C T k -1
(11) x ^ k x ^ k / k - 1 k (yk -g(x ^ k / k - 1 k ))
(12) Pk =(M -Kk Ck )Pk/k -1
将关于锂离子电池SOC的状态空间方程式(3)和(4)代入以上步骤进行运算,即为运用EKF算法估算电池SOC.
2.1.2 自适应调整噪声策略的选取制定
利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整.
极大似然估计是从系统量测量出现概率最大的角度进行估计,其特点是不仅考虑新息的变化,而且考虑新息协方差矩阵的变化规律[24 ] ,通过统计系统量测新息序列,实现对系统的噪声协方差矩阵的实时更新.具体公式如下:
(13) υj =yj -yj/j -1
(14) Sk = 1 m ∑ j = k - m + 1 k j υ T j
(15) Rk =Sk -Ck Pk/k -1 C T k
(16) Qk =Kk Sk K T k
式中:υj 为系统量测新息;yj 为从当前时刻往前算起第j 个时刻系统量测值;Sk 为前m 个量测新息的均值;m 为从当前时刻往前算起的历史信息数;Rk 为k 时刻量测噪声协方差;Qk 为k 时刻过程噪声协方差.
由式(9)和(10)可知,过程噪声协方差Q 和测量噪声协方差R 都能通过影响卡尔曼滤波增益K ,影响最终估算效果.Q 间接影响K ,Q 增大,会使K 增大或减小;R 直接影响K ,R 越大,K 就越小,观测值对状态预测值的反馈调整作用也就越弱. 对Q 、R 进行自适应调整时,存在3种不同的调整策略:①同时调整Q 和R [24 ] ;②固定Q ,只调整R ;③固定R ,只调整Q. 由文献[25 ]可知,第1种策略的滤波过程不稳定,可能会导致滤波发散,不可取. 对后两种策略,通过分析式(15)可知,R 要受到观测函数的导数阵Ck 的直接影响,而此处的观测函数是不连续函数,如果采用第2种策略,在自适应调整过程中,会使R 在断点处出现较大波动,因此采用第3种策略更好.
现有自适应调整噪声协方差估算SOC的研究大部分都采取策略①,即同时调整Q 和R ,而单独调整Q 或R 方面的研究较少.但经过以上分析可知,单独调整Q 更具优势,因此采用只调整Q 的策略,并将通过实验进行验证.
在EKF算法估算SOC的同时,用以上方法自适应调整Q ,就可实现AEKF算法估算电池的SOC.
2.2 卡尔曼滤波器算法KF估算内阻
电池内部参数会受到SOC、充放电电流、温度、电池寿命等因素的影响[26 ] 而不断变化,为了提高SOC的估算精度,需对电池模型参数进行实时在线估算.但如果对所有电池模型参数都做实时估算,算法太过复杂;而考虑到在各种影响因素中,电池寿命的影响最大,并且极化内阻、极化电容受电池寿命影响小,欧姆内阻在电池寿命初期和后期会有较大变化[27 ] ,因此只在线估算电池欧姆内阻.
欧姆内阻随电池寿命的变化缓慢,短时间内可认为基本不变[28 ] ,从而可以得到其状态方程:
(17) R o , k R o , k -1
(18) U (k )=U oc (ξ SOC (k ))-U S (k )- U L (k )-R o (k )I (k )
这是一个关于欧姆内阻的线性系统,可以用KF算法估算.KF算法的运算过程与EKF类似,只是不需要对系统作线性化近似处理.
2.3 自适应双卡尔曼滤波器算法估算电池SOC
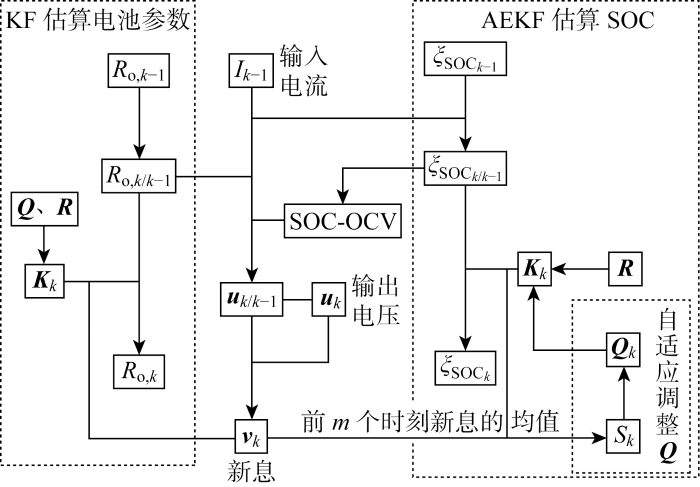
在运用AEKF估算SOC的同时运用KF估算电池欧姆内阻,就形成ADEKF估算电池SOC的算法,其算法结构如图3 所示.
图3
图3
ADEKF算法结构图
Fig.3
Structure of ADEKF algorithm
该算法以EKF算法为基础,通过自适应调整过程噪声协方差Q 改变增益,进而改善估算效果,同时使用KF实时估算欧姆内阻提高模型精度,进一步提高了估算精度.
3 实验验证与分析
在实验验证中设置分组对比实验,分别以典型工况、锂离子电池老化程度以及典型工况下老化程度为外部变量,对比分析EKF、AEKF以及所提ADEKF联合算法的准确性.在验证实验中,SOC实际初值为1,为定量研究算法的收敛性,算法中设置SOC初值ξ SOC,0 =0.7,定义算法估算结果首次收敛到误差小于2%所用时间为收敛时间.
采用平均绝对误差δ MAE 和算法收敛到2%后的最大误差δ ME 定量研究算法的准确性,δ MAE 的计算公式如下:
(19) δMAE = 1 n ∑ i = 1 n h i - x i
式中:n 为估算数据总量;hi 、xi 分别为第i 个点处SOC真值和估算值.
3.1 不同调整策略下的噪声自适应算法比较分析
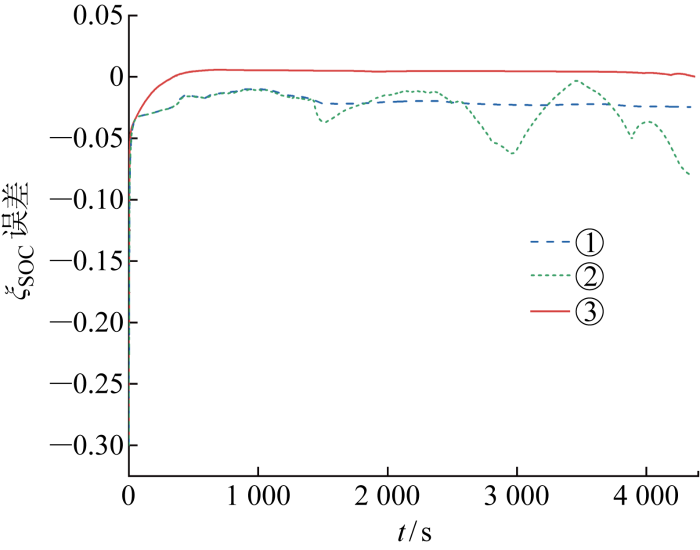
在ADEKF算法中使用AEKF估算锂离子电池的SOC时,自适应调整Q 、R 有3种情况:①同时自适应调整Q 和R ;②固定Q ,自适应调整测量噪声R ;③自适应调整过程噪声协方差Q ,固定R .在恒流工况下,这3种情况下估算ξ SOC 的误差如图4 和表1 所示.
图4
图4
自适应调整不同因子估算ξSOC 误差
Fig.4
ξ SOC error of adaptive estimation with different factors
对比可知,自适应调整Q 比自适应调整R 、同时自适应调整Q 和R 估算SOC的准确度高.这与2.1节中的分析相符.因此,在所提ADEKF算法中使用AEKF估算电池的SOC时选择自适应调整Q .
3.2 3种典型工况下电池SOC结果对比
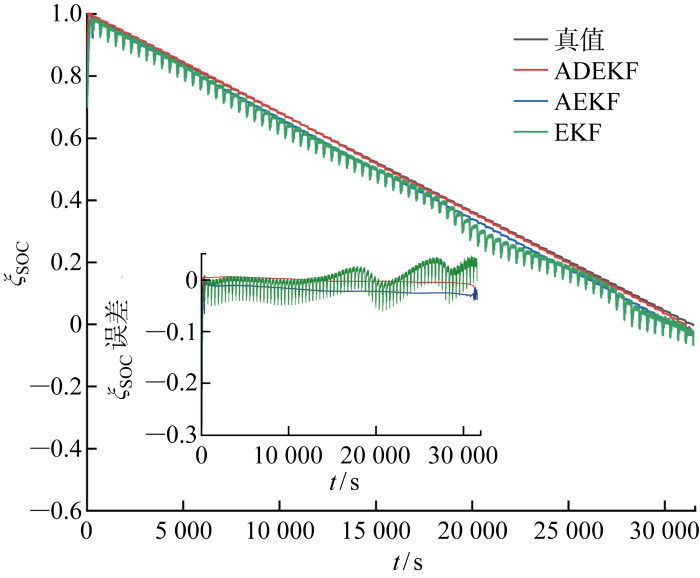
为验证ADEKF算法在不同工况下的普适性,分别在恒流工况、动态应力测试工况和北京公交车动态应力测试工况下对比ADEKF、AEKF及EKF算法估算全新锂离子电池SOC的结果,对比中将ξ SOC, 0 均设为错误值0.7.以DST工况为例展示典型工况下不同算法估算SOC结果如图5 所示,其他工况下不同估算方法的δ MAE 及δ ME 分析如表2 所示.
图5
图5
DST工况下ξSOC 估算结果
Fig.5
ξ SOC estimation results under DST condition
由图5 可知,3种算法中,ADEKF算法在DST工况下估算误差最小,EKF算法估算曲线振荡严重,而ADEKF算法估算曲线平滑.与EKF估算结果对比,ADEKF算法δ MAE 减小2.09百分点,δ ME 减小3.49百分点且收敛时间从 2 776 s 加快到 56 s.因此,ADEKF算法有明显优势,能较好地估算DST工况下锂离子电池SOC.同时,对比表2 中另外两种工况下估算误差和收敛时间数据,与DST工况有类似结论.尤其在复杂的BBDST工况下,ADEKF估算δ MAE 在3种工况中最小,表明多工况条件下ADEKF算法在估算精度与速度方面优势明显.
3.3 不同老化程度电池SOC结果对比
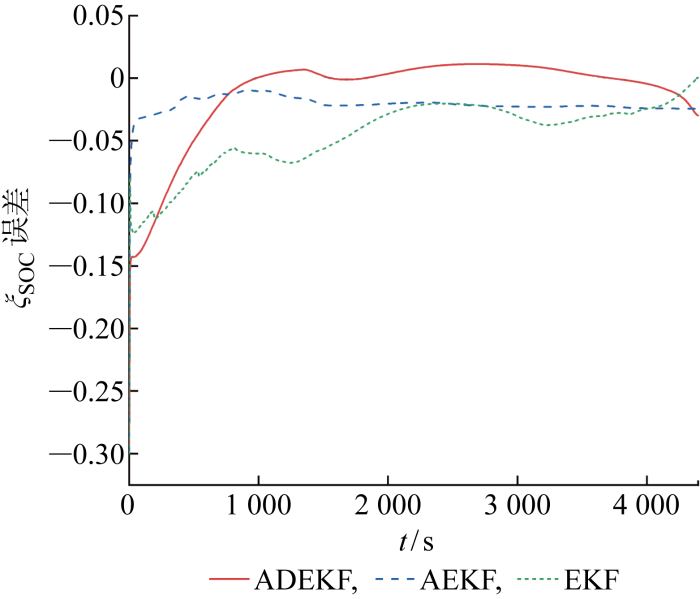
在恒流工况下,利用实验样品组中5组不同健康状态的电池分别对比ADEKF算法、 AEKF算法和EKF算法估算SOC结果. 老化程度最严重即电池寿命终止时(ζ SOH =79.2%)的SOC估算结果对比如图6 所示.
图6
图6
ζSOH =79.2%时ξSOC 估算误差对比
Fig.6
Comparison of ξ SOC estimation error at ζ SOH =79.2%
由图6 可见,在恒流工况下,实时估算电池R o 并固定其余4个模型参数的ADEKF算法与采用5个固定参数的AEKF或EKF相比,前者估算SOC精度更高;但在电池放电末段,ADEKF估算SOC的误差增大,这可能是由于电池放电后期内部化学反应剧烈.此外,其他不同老化程度锂离子电池估算对比结果如表3 所示.
由表3 可见,在不同老化程度下ADEKF算法δ MAE 均为最小,且随着老化程度加深,ADEKF算法估算误差变化很小.由此可以看出,在恒流工况下ADEKF算法在老化锂离子电池SOC估算中优势明显.
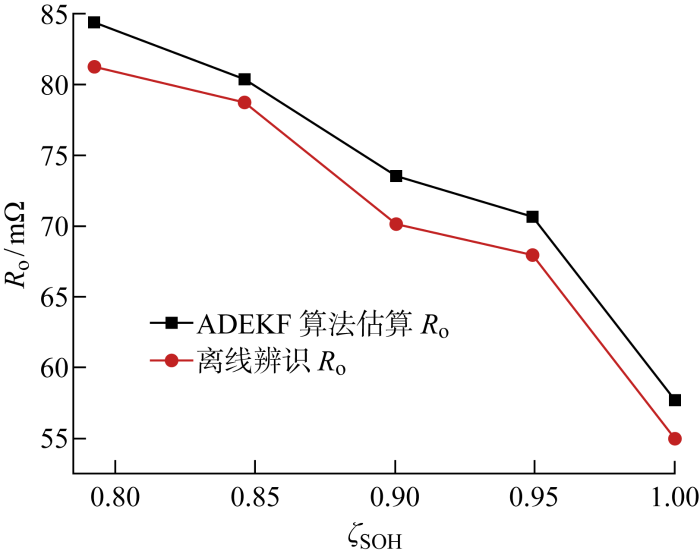
同时,为了验证等效电路模型参数实时估算的准确性与有效性,对比ADEKF算法实时估算R o 结果和离线辨识结果.如图7 所示,不同老化程度电池在SOC=70%时2种结果基本吻合.
图7
图7
ADEKF算法估算与离线辨识Ro 结果对比
Fig.7
Comparison of R o estimation by using ADEKF algorithm and offline identification of R o
3.4 公开数据集下ADEKF算法验证
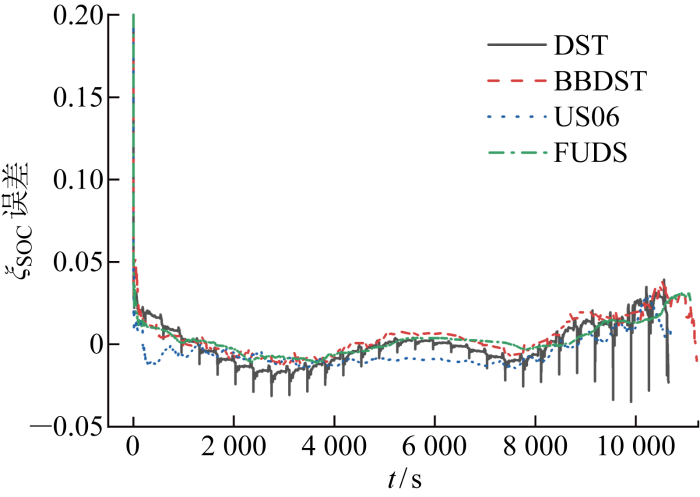
选用马里兰数据集中额定容量为2 A·h的 18 650 型三元锂离子电池数据验证复杂工况下ADEKF算法准确度,验证选择实际初始容量为 1.997 6 A·h的电池2在实验温度为25 ℃下的实验数据.数据提供了电池2的脉冲实验数据以及在4种常用电动汽车测试工况DST、BBDST、US06和FUDS的测试数据[29 ] .电池模型以及模型参数设置均与利用自有实验数据验证算法时相同,采用了1.1节和1.3节中所描述的方法.各工况测试中电池实际初始SOC均为80%,为验证算法收敛性,算法中取ξ SOC.0 =1. 4种工况下ADEKF算法估算误差如图8 和表4 所示.
图8
图8
电池2各工况下估算ξSOC 误差
Fig.8
Estimated ξ SOC error of Battery 2 under different operating conditions
由表4 分析可知,4种工况下,ADEKF算法估算锂离子电池SOC的δ MAE 均小于1%,并且在复杂工况下算法δ MAE 小、收敛时间短.在使用相同数据验证的情况下,本文算法相比于其他3种算法,在不同工况下估算精度均有一定提升.DST工况下,相比于CNN-GUR算法δ MAE 降低28.125%.BBDST工况下,在初值设置均偏离正确值的情况下,相比于BP-EKF算法δ MAE 降低23.932%.US06工况下,相比于EMD-GUR算法δ MAE 降低29.908%.FUDS工况下,相比于AUKF算法δ MAE 降低16.049%.采用马里兰数据集验证并将验证结果与其他算法对比,发现ADEKF算法兼具准确度高、鲁棒性强和工况容忍性强的优点,具有明显优势.
3.5 复杂动力工况下老化锂离子电池SOC估算结果综合对比
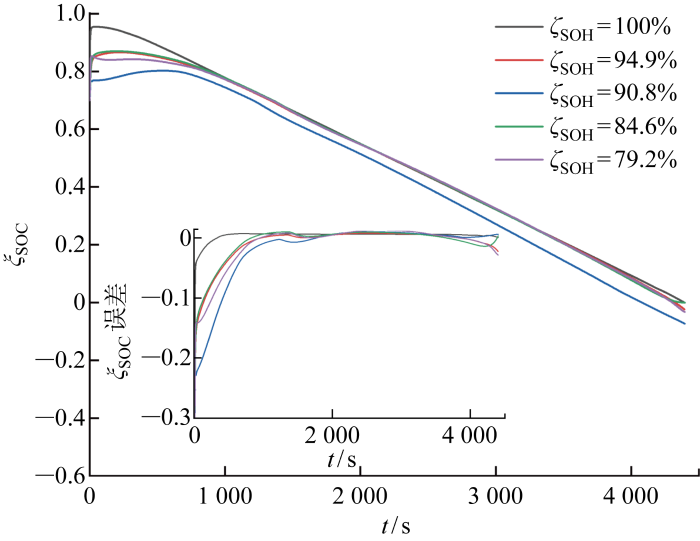
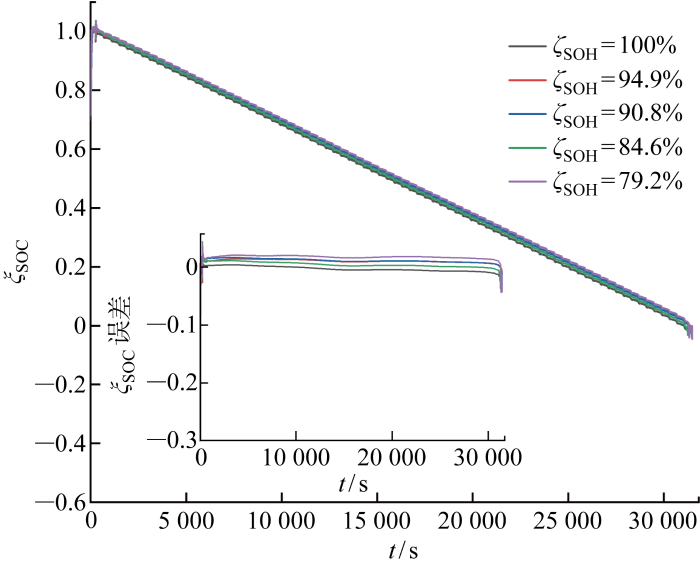
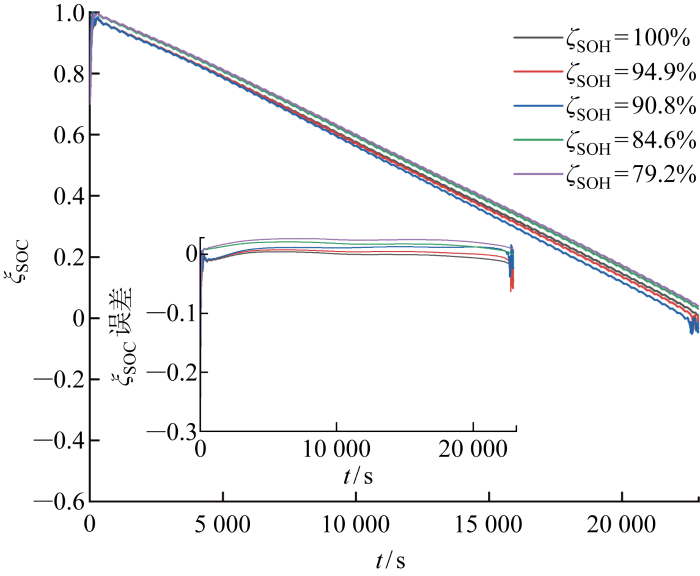
前述自有实验数据与公开数据集验证结果表明,ADEKF算法在不同工况或不同老化程度电池SOC估算中均表现出较高的估算精度,但在动力电池实际使用中,驾驶工况与电池老化两种影响因素同时存在.因此,为验证ADEKF算法在驾驶工况和电池老化综合作用下估算电池ξ SOC 的准确性,分别在恒流工况、DST工况和BBDST这3种工况下采用ADEKF算法估算不同老化程度(ζ SOH =94.9%,90.8%,84.6%,79.2%)电池SOC,结果如图9 ~11 所示,误差分析结果如表5 所示.表中: EKF与AEKF最小误差表示在相同对比工况下,电池ζ SOH 为100%、94.9%、90.8%、84.6%、79.2%时估算结果中δ MAE 的最小值.
图9
图9
恒流工况下老化电池ξSOC 估算结果
Fig.9
ξ SOC estimation of aged batteries under constant current condition
图10
图10
DST工况下老化电池ξSOC 估算结果
Fig.10
ξ SOC estimation of aged batteries under DST condition
图11
图11
BBDST工况下老化电池ξSOC 估算结果
Fig.11
ξ SOC estimation of aged battery under BBDST condition
由表5 分析可知,在多工况与电池老化两种综合因素影响下,所提针对老化锂离子电池SOC的ADEKF算法在恒流工况下δ MAE 不超过0.66%,收敛时间不超过530 s;DST工况下δ MAE 不超过2.45%,收敛时间不超过76 s;BBDST工况下δ MAE 不超过2.20%,收敛时间不超过158 s.由此可得,在恒流工况、DST以及BBDST这3种工况下估算老化电池SOC时,所提ADEKF算法收敛速度明显加快.此外,将ADEKF估算结果δ MAE 与同工况下EKF与AEKF算法的δ MAE 进行对比,发现除DST下84.6%SOH一组数据外,ADEKF联合算法的最大δ MAE 均小于其他两种算法最小δ MAE .通过多组实验数据对比分析可得,相比EKF算法,所提ADEKF算法对不同老化电池在3种工况下,估算结果的δ MAE 分别下降1.868百分点、2.296百分点和2.534百分点.说明在3种工况下估算老化电池SOC时,所提ADEKF算法精度更高.综上可得,经实验验证ADEKF算法在动力电池实际复杂应用条件下普适性强.
4 结论
为减小常见EKF算法估算动力电池SOC时由于复杂驾驶工况和电池老化两种因素导致的估算误差,以二阶RC模型作为锂离子电池的等效电路模型,采用ADEKF算法对三元锂离子电池在不同工况条件以及不同老化程度下进行SOC估算.研究结果表明:
(1) 仅考虑复杂工况下估算电池SOC时噪声设置不合理的问题,采用固定量测噪声协方差而只调整过程噪声协方差的方法可以明显改善SOC估算结果.分别采用自有实验数据和马里兰数据库对比验证,在较为复杂的工况条件下,估算精度相对其他算法显著提高.
(2) 仅考虑电池老化后电池模型参数会发生变化的问题,ADEKF中运用1组KF实时跟踪欧姆内阻的变化,有效提高老化锂离子电池SOC估算精度.
(3) 综合考虑驾驶工况与电池老化两种综合因素作用时的SOC估算,实验验证所提ADEKF在恒流、DST和BBDST这3种工况下估算老化锂离子电池SOC时,平均绝对误差与最大误差相比AEKF与EKF估算误差均有效减小.因此,两种因素综合作用,ADEKF算法依然具有明显的精度优势,算法普适性强,实用价值高.
参考文献
View Option
[1]
李佳琪 , 徐潇源 , 严正 . 大规模新能源汽车接入背景下的电氢能源与交通系统耦合研究综述
[J]. 上海交通大学学报 , 2022 , 56 (3 ): 253 -266 .
DOI:10.16183/j.cnki.jsjtu.2021.464
[本文引用: 1]
新能源的大规模开发利用是实现“双碳”目标的重要手段.可再生能源发电耦合制氢技术在提高可再生能源消纳率的同时,加速了新能源汽车的普及.未来,电氢能源系统与交通系统的耦合将会更加密切.以大规模新能源汽车接入为背景,首先综述了电氢能源系统的发展现状,并对耦合系统制氢、出力波动平抑以及参与电力系统优化运行3种工作模式进行了介绍.在此基础上,从不同能源角度出发,分别对电力-交通耦合系统中的联合规划与优化运行研究现状以及氢能-交通耦合系统中的加氢站优化与氢能运输相关问题进行了总结分析.最后,结合当前研究中存在的瓶颈,从动态模型构建、不确定性因素影响等方面对未来可行研究方向进行了展望.
LI Jiaqi XU Xiaoyuan YAN Zheng A review of coupled electricity and hydrogen energy system with transportation system under the background of large-scale new energy vehicles access
[J]. Journal of Shanghai Jiao Tong University , 2022 , 56 (3 ): 253 -266 .
[本文引用: 1]
[2]
DU C Q SHAO J B WU D M et al Research on co-estimation algorithm of SOC and SOH for lithium-ion batteries in electric vehicles
[J]. Electronics , 2022 , 11 (2 ): 181.
[本文引用: 1]
[3]
SUN Q ZHANG H ZHANG J R et al Adaptive unscented Kalman filter with correntropy loss for robust state of charge estimation of lithium-ion battery
[J]. Energies , 2018 , 11 (11 ): 3123.
[本文引用: 1]
[4]
鲁伟 , 续丹 , 杨晴霞 , 等 . 锂电池分数阶建模与荷电状态研究
[J]. 西安交通大学学报 , 2017 , 51 (7 ): 124 -129 .
[本文引用: 1]
LU Wei XU Dan YANG Qingxia et al Fractional model and state-of-charge of lithium battery
[J]. Journal of Xi’an Jiaotong University , 2017 , 51 (7 ): 124 -129 .
[本文引用: 1]
[5]
刘毅 , 谭国俊 , 何晓群 . 优化电池模型的自适应Sigma卡尔曼荷电状态估算
[J]. 电工技术学报 , 2017 , 32 (2 ): 108 -118 .
[本文引用: 1]
LIU Yi TAN Guojun HE Xiaoqun Optimized battery model based adaptive sigma Kalman filter for state of charge estimation
[J]. Transactions of China Electrotechnical Society , 2017 , 32 (2 ): 108 -118 .
[本文引用: 1]
[6]
HUANG Z J FANG Y S XU J J SOC estimation of Li-ION battery based on improved EKF algorithm
[J]. International Journal of Automotive Technology , 2021 , 22 (2 ): 335 -340 .
[本文引用: 1]
[7]
JIANG C WANG S L WU B et al A state-of-charge estimation method of the power lithium-ion battery in complex conditions based on adaptive square root extended Kalman filter
[J]. Energy , 2021 , 219 : 119603 .
[本文引用: 1]
[8]
LIM K BASTAWROUS H A DUONG V H et al Fading Kalman filter-based real-time state of charge estimation in LiFePO4 battery-powered electric vehicles
[J]. Applied Energy , 2016 , 169 : 40 -48 .
[本文引用: 1]
[9]
杨帆 , 和嘉睿 , 陆鸣 , 等 . 基于BP-UKF算法的锂离子电池SOC估计
[J]. 储能科学与技术 , 2023 , 12 (2 ): 552 -559 .
DOI:10.19799/j.cnki.2095-4239.2022.0574
[本文引用: 1]
电池的荷电状态(state of charge,SOC)是电池管理的重要指标之一,准确的SOC估计是保证锂离子电池安全有效运行的必要条件。为提高锂离子电池SOC估计的准确性,本文基于二阶Thevenin等效模型,提出一种将无迹卡尔曼滤波(unscented Kalman filter,UKF)与BP(back propagation)神经网络相结合的SOC估计方法。在通过混合功率脉冲特性测试获取模型参数的基础上,首先利用UKF算法对电池SOC进行初步估计,通过非线性点变换的方法避免了扩展卡尔曼滤波(extended Kalman filter,EKF)在线性化过程中对系统造成的精度损失;其次,构建三层BP神经网络,综合考虑锂离子电池的充放电电压、电流等参数,对估计结果进行修正,将估计误差从初始估计结果中排除,以达到更加准确的估计结果。通过电池充放电测试仪采集锂离子电池在动态应力测试下的充放电数据,并在不同的噪声环境下将本文提出的BP-UKF算法与EFK算法和UKF算法进行对比实验分析。实验结果表明,本文提出的BP-UKF算法的最大误差在2.18%以内,平均误差在0.54%以内,均方根误差在0.0044以内,较EKF算法和UKF算法有较大程度地提升;并且在较大的环境噪声条件下,BP-UKF算法的准确性提升更为明显。
YANG Fan HE Jiarui LU Ming et al SOC estimation of lithium-ion batteries based on BP-UKF algorithm
[J]. Energy Storage Science & Technology , 2023 , 12 (2 ): 552 -559 .
[本文引用: 1]
[10]
HE H W XIONG R ZHANG X W et al State-of-charge estimation of the lithium-ion battery using an adaptive extended Kalman filter based on an improved thevenin model
[J]. IEEE Transactions on Vehicular Technology , 2011 , 60 (4 ): 1461 -1469 .
[本文引用: 2]
[11]
陈玉珊 , 秦琳琳 , 吴刚 , 等 . 基于渐消记忆递推最小二乘法的电动汽车电池荷电状态在线估计
[J]. 上海交通大学学报 , 2020 , 54 (12 ): 1340 -1346 .
DOI:10.16183/j.cnki.jsjtu.2020.172
[本文引用: 1]
电动汽车中,先进的电池管理系统可以为电池的安全高效使用提供保障.荷电状态(SOC)无法直接测量得到,电池管理系统的主要任务是准确、可靠地估计电池的SOC.为了估计电池的SOC,选择一阶电阻电容(RC)等效电路模型描述电池的外特性,模型参数中包含开路电压(OCV),通过渐消记忆递推最小二乘法(FFRLS)辨识模型参数,再用SOC-OCV模型实时计算.使用马里兰大学高级生命周期工程研究中心(CALCE)电池组提出的镍钴锰酸锂(LNMC)/石墨电池在动态应力测试(DST)和北京动态应力测试(BJDST)工况下的数据检验算法,结果表明,SOC估计误差在DST工况下不超过 3.419 0%,在BJDST工况下不超过 4.233 5%,实现了SOC的在线估计.
CHEN Yushan QIN Linlin WU Gang et al Online state of charge estimation for battery in electric vehicles based on forgetting factor recursive least squares
[J]. Journal of Shanghai Jiao Tong University , 2020 , 54 (12 ): 1340 -1346 .
[本文引用: 1]
[12]
杜帮华 , 张宇 , 吴铁洲 , 等 . 梯次利用锂离子电池等效模型参数在线辨识方法
[J]. 储能科学与技术 , 2021 , 10 (1 ): 342 -348 .
DOI:10.19799/j.cnki.2095-4239.2020.0235
[本文引用: 1]
针对目前梯次利用锂离子电池受老化的影响,导致在采用传统带遗忘因子的最小二乘法进行等效模型在线参数辨识后,会出现模型参数过饱和、无法跟踪时变参数的问题。本工作提出一种可变遗忘因子的最小二乘法,通过不断地对遗忘因子进行矫正更新,从而更好地跟踪梯次利用电池老化特性。以锂电池一阶RC等效电路模型为对象,搭建测试平台进行充放电试验,并与传统带遗忘因子的最小二乘法的参数辨识结果进行对比。实验结果表明,该方法能够快速收敛及动态跟踪,同时模型端电压参数平均误差减小到25 mV以内,所提出的方法在DST和储能系统典型工况下运行时,其对应的参数辨识精度提高了38.33%,证明该方法具有较高的准确性。
DU Banghua ZHANG Yu WU Tiezhou et al An online identification method for equivalent model parameters of aging lithium-ion batteries
[J]. Energy Storage Science & Technology , 2021 , 10 (1 ): 342 -348 .
[本文引用: 1]
[13]
XIONG R SUN F C CHEN Z et al A data-driven multi-scale extended Kalman filtering based parameter and state estimation approach of lithium-ion polymer battery in electric vehicles
[J]. Applied Energy , 2014 , 113 : 463 -476 .
[本文引用: 1]
[14]
SEAMAN A DAO T S MCPHEE J A survey of mathematics-based equivalent-circuit and electrochemical battery models for hybrid and electric vehicle simulation
[J]. Journal of Power Sources , 2014 , 256 : 410 -423 .
[本文引用: 1]
[15]
LI Y YANG J LIU W L et al Multi-level model reduction and data-driven identification of the lithium-ion battery
[J]. Energies , 2020 , 13 (15 ): 3791.
[本文引用: 1]
[16]
LAI X ZHENG Y J SUN T A comparative study of different equivalent circuit models for estimating state-of-charge of lithium-ion batteries
[J]. Electrochimica Acta , 2018 , 259 : 566 -577 .
[本文引用: 2]
[17]
XIONG R SUN F C HE H W Data-driven state-of-charge estimator for electric vehicles battery using robust extended Kalman filter
[J]. International Journal of Automotive Technology , 2014 , 15 (1 ): 89 -96 .
[本文引用: 1]
[18]
卢地华 , 陈自强 . 基于双充电状态的锂离子电池健康状态估计
[J]. 上海交通大学学报 , 2022 , 56 (3 ): 342 -352 .
DOI:10.16183/j.cnki.jsjtu.2021.027
[本文引用: 1]
针对锂离子电池实际应用中存在不完全充放电而导致的充电起始点及截止点不确定问题,提出一种基于双充电状态因子的电池健康状态估计方法.搭建电池老化实验台架,采用8块镍钴锰锂离子电池进行老化实验;区别于传统单状态因子估计,选取不同老化阶段下恒压充电状态前端等时间差的电流平均值,以及恒流充电状态末端等幅值电压的充电时间构造健康因子;分析不同老化阶段实验电池的荷电状态-开路电压对应关系,通过理论推导及实验结果证明健康因子的正确性;建立具备强泛化能力的改进支持向量回归模型,并通过粒子群算法优化模型超参数.实验结果表明:所提双充电状态健康因子与电池老化衰减密切相关,所建立的改进支持向量回归模型可实时估计不同老化状态下的电池健康状态,具备容量局部回弹变化的表征能力,可作为一种有效的嵌入式电池管理系统健康状态估计方法.
LU Dihua CHEN Ziqiang State of health estimation of lithium-ion batteries based on dual charging state
[J]. Journal of Shanghai Jiao Tong University , 2022 , 56 (3 ): 342 -352 .
[本文引用: 1]
[19]
裴磊 . 基于平衡电压的电动汽车锂离子电池状态估计方法研究 [D]. 哈尔滨 : 哈尔滨工业大学 , 2016 .
[本文引用: 1]
PEI Lei State estimation based on equilibrium voltages for lithium-ion batteries in electric vehicles [D]. Harb in:Harbin Institute of Technology, 2016 .
[本文引用: 1]
[20]
付诗意 , 吕桃林 , 闵凡奇 , 等 . 电动汽车用锂离子电池SOC估算方法综述
[J]. 储能科学与技术 , 2021 , 10 (3 ): 1127 -1136 .
DOI:10.19799/j.cnki.2095-4239.2021.0013
[本文引用: 1]
综述了锂离子电池荷电状态(state of charge,SOC)估算方法的研究进展。作为电动汽车电池管理中的重要指标,SOC表征了电池在当前循环中剩余的电量。准确的SOC估算可有效地避免电池工作于过低电量等不良工况,保证电池始终运行在安全的状态中,从而有效提高电池使用的效率和延长使用寿命。介绍并比较了几种常用的SOC估算方法:安时积分法最为简单,但由于其是开环估算系统,无法对估计误差进行修正;开路电压法可以根据开路电压与SOC之间的对应关系实现查表式估算,然而由于需要长时间静置来获取稳定的电压值,不适用于在线估算;卡尔曼滤波族方法是前两种方法的结合,可依靠系统观测值的误差对状态估计值进行及时修正,搭配适合的电池模型可获得较高的估算精度且适用于在线估算;数据驱动的方法则需要长期性的历史数据进行数据库的建立。本文总结了每种SOC估算方法的优缺点以及改进的方案。基于以上分析,结合SOC估算算法在工程实际中应用的局限与面对的挑战,对锂离子电池SOC在线估算的发展做出了展望。
FU Shiyi LYU Taolin MIN Fanqi et al Review of estimation methods on SOC of lithium-ion batteries in electric vehicles
[J]. Energy Storage Science & Technology , 2021 , 10 (3 ): 1127 -1136 .
[本文引用: 1]
[21]
宫明辉 , 李凌峰 , 乌江 , 等 . 变论域双模糊控制器在锂电池均衡策略仿真中的应用
[J]. 西安交通大学学报 , 2020 , 54 (11 ): 158 -165 .
[本文引用: 1]
GONG Minghui LI Lingfeng WU Jiang et al Application of variable universe double fuzzy controller in simulation of lithium battery equilibrium strategy
[J]. Journal of Xi’an Jiaotong University , 2020 , 54 (11 ): 158 -165 .
[本文引用: 1]
[22]
程泽 , 杨磊 , 孙幸勉 . 基于自适应平方根无迹卡尔曼滤波算法的锂离子电池SOC和SOH估计
[J]. 中国电机工程学报 , 2018 , 38 (8 ): 2384 -2393 .
[本文引用: 1]
CHENG Ze YANG Lei SUN Xingmian State of charge and state of health estimation of Li-ion batteries based on adaptive square-root unscented Kalman filters
[J]. Proceedings of the CSEE , 2018 , 38 (8 ): 2384 -2393 .
[本文引用: 1]
[23]
GUO Y F ZHAO Z S HUANG L M SoC estimation of lithium battery based on AEKF algorithm
[J]. Energy Procedia , 2017 , 105 : 4146 -4152 .
[本文引用: 1]
[24]
赵云飞 , 徐俊 , 王霄 , 等 . 双自适应衰减卡尔曼滤波锂电池荷电状态估计
[J]. 西安交通大学学报 , 2018 , 52 (12 ): 99 -105 .
[本文引用: 2]
ZHAO Yunfei XU Jun WANG Xiao et al An estimation method for state of charge of lithium-ion batteries using dual adaptive fading extended Kalman filter
[J]. Journal of Xi’an Jiaotong University , 2018 , 52 (12 ): 99 -105 .
[本文引用: 2]
[25]
岳晓奎 , 袁建平 . 一种基于极大似然准则的自适应卡尔曼滤波算法
[J]. 西北工业大学学报 , 2005 , 23 (4 ): 469 -474 .
[本文引用: 1]
YUE Xiaokui YUAN Jianping An adaptive Kalman filtering algorithm based on maximum-likelihood criterion
[J]. Journal of Northwestern Polytechnical University , 2005 , 23 (4 ): 469 -474 .
[本文引用: 1]
[26]
王义军 , 左雪 . 锂离子电池荷电状态估算方法及其应用场景综述
[J]. 电力系统自动化 , 2022 , 46 (14 ): 193 -207 .
[本文引用: 1]
WANG Yijun ZUO Xue Review on estimation methods for state of charge of lithium-ion battery and their application scenarios
[J]. Automation of Electric Power Systems , 2022 , 46 (14 ): 193 -207 .
[本文引用: 1]
[27]
魏学哲 , 徐玮 , 沈丹 . 锂离子电池内阻辨识及其在寿命估计中的应用
[J]. 电源技术 , 2009 , 33 (3 ): 217 -220 .
[本文引用: 1]
WEI Xuezhe XU Wei SHEN Dan Internal resistance identification of Li-ion battery and its application in battery life estimation
[J]. Chinese Journal of Power Sources , 2009 , 33 (3 ): 217 -220 .
[本文引用: 1]
[28]
王笑天 , 杨志家 , 王英男 , 等 . 双卡尔曼滤波算法在锂电池SOC估算中的应用
[J]. 仪器仪表学报 , 2013 , 34 (8 ): 1732 -1738 .
[本文引用: 1]
WANG Xiaotian YANG Zhijia WANG Yingnan et al Application of dual extended Kalman filtering algorithm in the state-of-charge estimation of lithium-ion battery
[J]. Chinese Journal of Scientific Instrument , 2013 , 34 (8 ): 1732 -1738 .
[本文引用: 1]
[29]
ZHENG F D XING Y J JIANG J C et al Influence of different open circuit voltage tests on state of charge online estimation for lithium-ion batteries
[J]. Applied Energy , 2016 , 183 : 513 -525 .
[本文引用: 1]
[30]
刘峰 , 陈海忠 . 基于CEEMDAN和ISOA-ELM的锂电池荷电状态预测
[J]. 储能科学与技术 , 2023 , 12 (4 ): 1244 -1256 .
DOI:10.19799/j.cnki.2095-4239.2022.0708
[本文引用: 1]
锂电池具有能量密度高、输出电压高、无记忆效应等优点,但过充过放电易引发安全事故,精确预测锂电池荷电状态(SOC)让其工作在最佳状态,具有重要现实意义,本文提出了一种基于自适应噪声集成经验模态分解(CEEMDAN)和数据驱动模型组合预测锂离子电池荷电状态的方法,对锂电池原始电流数据进行模态分解,得到多个子序列模态分量,提出一种基于惯性权重与Levy飞行机制的改进海鸥算法(ISOA),对极限学习机预测模型(ELM)参数进行优化,构建ISOA-ELM锂电池预测模型;训练模型得到锂电池SOC预测结果。实验结果表明,该模型在实际工作中能够更贴合实际SOC,更有利于锂电池工作在最佳状态。
LIU Feng CHEN Haizhong Lithium-ion battery state prediction based on CEEMDAN and ISOA-ELM
[J]. Energy Storage Science & Technology , 2023 , 12 (4 ): 1244 -1256 .
[本文引用: 1]
[31]
白俊琦 , 贤燕华 . 基于BP-多时间尺度UKF优化算法的SOC估计
[J/OL]. 电源学报 . https://kns.cnki.net/kcms/detail//12.1420.tm.20221201.1510.002.html.
URL
[本文引用: 1]
BAI Junqi XIAN Yanhua State of charge estimation based on BP-UKF optimization algorithm
[J/OL]. Journal of Power Supply . https://kns.cnki.net/kcms/detail//12.1420.tm.20221201.1510.002.html.
URL
[本文引用: 1]
[32]
李宁 , 何复兴 , 马文涛 , 等 . 基于经验模态分解的门控循环单元神经网络的锂离子电池荷电状态估计
[J]. 电工技术学报 , 2022 , 37 (17 ): 4528 -4536 .
[本文引用: 1]
LI Ning HE Fuxing MA Wentao et al State-of-charge estimation of lithium-ion battery based on gated recurrent unit using empirical mode decomposition
[J]. Transactions of China Electrotechnical Society , 2022 , 37 (17 ): 4528 -4536 .
[本文引用: 1]
大规模新能源汽车接入背景下的电氢能源与交通系统耦合研究综述
1
2022
... 随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点. ...
A review of coupled electricity and hydrogen energy system with transportation system under the background of large-scale new energy vehicles access
1
2022
... 随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点. ...
Research on co-estimation algorithm of SOC and SOH for lithium-ion batteries in electric vehicles
1
2022
... 随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点. ...
Adaptive unscented Kalman filter with correntropy loss for robust state of charge estimation of lithium-ion battery
1
2018
... 随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点. ...
锂电池分数阶建模与荷电状态研究
1
2017
... 随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点. ...
Fractional model and state-of-charge of lithium battery
1
2017
... 随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点. ...
优化电池模型的自适应Sigma卡尔曼荷电状态估算
1
2017
... 随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点. ...
Optimized battery model based adaptive sigma Kalman filter for state of charge estimation
1
2017
... 随着我国“双碳”目标的提出,发展新能源汽车已成为共识,新能源汽车在交通出行领域占据重要战略地位[1 ] ,锂离子电池作为高效的电能存储装置在电动汽车等领域获得了广泛使用.为保证锂离子电池的安全运行,延长其使用寿命,需建立性能优良的电池管理系统(battery management system,BMS),而估算电池荷电状态(state of charge,SOC)是BMS系统其他功能实现的前提.因此,准确估算电池SOC具有十分重要的意义[2 -3 ] .但电池SOC受到电流、温度、老化及复杂工况等因素影响[4 -5 ] ,导致SOC实时精确估算成为难点. ...
SOC estimation of Li-ION battery based on improved EKF algorithm
1
2021
... 在目前估算SOC的方法中,扩展卡尔曼滤波(extended Kalman filter,EKF)算法在保持较高锂离子电池估算精度的前提下更易实现,是目前SOC估算中研究较多的方法[6 ⇓ -8 ] .然而,在电动汽车SOC估算过程中,电池实际驾驶工况以及电池本身的老化过程给传统卡尔曼滤波算法的准确性带来巨大挑战. ...
A state-of-charge estimation method of the power lithium-ion battery in complex conditions based on adaptive square root extended Kalman filter
1
2021
... 在目前估算SOC的方法中,扩展卡尔曼滤波(extended Kalman filter,EKF)算法在保持较高锂离子电池估算精度的前提下更易实现,是目前SOC估算中研究较多的方法[6 ⇓ -8 ] .然而,在电动汽车SOC估算过程中,电池实际驾驶工况以及电池本身的老化过程给传统卡尔曼滤波算法的准确性带来巨大挑战. ...
Fading Kalman filter-based real-time state of charge estimation in LiFePO4 battery-powered electric vehicles
1
2016
... 在目前估算SOC的方法中,扩展卡尔曼滤波(extended Kalman filter,EKF)算法在保持较高锂离子电池估算精度的前提下更易实现,是目前SOC估算中研究较多的方法[6 ⇓ -8 ] .然而,在电动汽车SOC估算过程中,电池实际驾驶工况以及电池本身的老化过程给传统卡尔曼滤波算法的准确性带来巨大挑战. ...
基于BP-UKF算法的锂离子电池SOC估计
1
2023
... 首先,电动汽车驾驶工况复杂多变是造成系统噪声不稳定的重要原因之一,而使用EKF估算锂离子电池SOC时认为系统的噪声为高斯白噪声,这与实际驾驶工况不相符,会导致较大的估算误差.杨帆等[9 ] 提出一种无迹卡尔曼滤波(unscented Kalman filter,UKF)与反向传播(back propagation,BP)神经网络结合的联合算法,在UKF估算电池SOC基础上,采用BP神经网络预测不同噪声下UKF算法滤波的误差,再将预测出的误差从UKF估算结果中去除.He等[10 ] 根据测量值与估算值之间的差值来自适应调整系统的噪声,建立自适应扩展卡尔曼滤波算法(adaptive extended Kalman filter,AEKF)改善由于噪声值变化引起的估算误差大和发散等问题,在联邦城市行驶工况(federal urban driving schedule,FUDS)下验证了算法准确度,但缺少其他工况下的验证,因此算法的普适性有待商榷. ...
SOC estimation of lithium-ion batteries based on BP-UKF algorithm
1
2023
... 首先,电动汽车驾驶工况复杂多变是造成系统噪声不稳定的重要原因之一,而使用EKF估算锂离子电池SOC时认为系统的噪声为高斯白噪声,这与实际驾驶工况不相符,会导致较大的估算误差.杨帆等[9 ] 提出一种无迹卡尔曼滤波(unscented Kalman filter,UKF)与反向传播(back propagation,BP)神经网络结合的联合算法,在UKF估算电池SOC基础上,采用BP神经网络预测不同噪声下UKF算法滤波的误差,再将预测出的误差从UKF估算结果中去除.He等[10 ] 根据测量值与估算值之间的差值来自适应调整系统的噪声,建立自适应扩展卡尔曼滤波算法(adaptive extended Kalman filter,AEKF)改善由于噪声值变化引起的估算误差大和发散等问题,在联邦城市行驶工况(federal urban driving schedule,FUDS)下验证了算法准确度,但缺少其他工况下的验证,因此算法的普适性有待商榷. ...
State-of-charge estimation of the lithium-ion battery using an adaptive extended Kalman filter based on an improved thevenin model
2
2011
... 首先,电动汽车驾驶工况复杂多变是造成系统噪声不稳定的重要原因之一,而使用EKF估算锂离子电池SOC时认为系统的噪声为高斯白噪声,这与实际驾驶工况不相符,会导致较大的估算误差.杨帆等[9 ] 提出一种无迹卡尔曼滤波(unscented Kalman filter,UKF)与反向传播(back propagation,BP)神经网络结合的联合算法,在UKF估算电池SOC基础上,采用BP神经网络预测不同噪声下UKF算法滤波的误差,再将预测出的误差从UKF估算结果中去除.He等[10 ] 根据测量值与估算值之间的差值来自适应调整系统的噪声,建立自适应扩展卡尔曼滤波算法(adaptive extended Kalman filter,AEKF)改善由于噪声值变化引起的估算误差大和发散等问题,在联邦城市行驶工况(federal urban driving schedule,FUDS)下验证了算法准确度,但缺少其他工况下的验证,因此算法的普适性有待商榷. ...
... 利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整. ...
基于渐消记忆递推最小二乘法的电动汽车电池荷电状态在线估计
1
2020
... 其次,EKF是基于模型的算法,锂离子电池老化过程中模型参数会发生明显变化,进而造成SOC估算准确性大幅下降.为减小由于模型参数不准确而导致的估算误差,陈玉珊等[11 ] 采用含遗忘因子的递推最小二乘算法实时估计电池模型参数.杜帮华等[12 ] 提出可变遗忘因子的递推最小二乘法,通过不断更新遗忘因子更好地实时跟踪电池特性.Xiong等[13 ] 提出多尺度扩展卡尔曼滤波即利用宏观尺度估计电池模型参数,利用微观尺度估计电池SOC.但在现有研究中,同时考虑锂离子电池模型参数变化与噪声调整的研究较少. ...
Online state of charge estimation for battery in electric vehicles based on forgetting factor recursive least squares
1
2020
... 其次,EKF是基于模型的算法,锂离子电池老化过程中模型参数会发生明显变化,进而造成SOC估算准确性大幅下降.为减小由于模型参数不准确而导致的估算误差,陈玉珊等[11 ] 采用含遗忘因子的递推最小二乘算法实时估计电池模型参数.杜帮华等[12 ] 提出可变遗忘因子的递推最小二乘法,通过不断更新遗忘因子更好地实时跟踪电池特性.Xiong等[13 ] 提出多尺度扩展卡尔曼滤波即利用宏观尺度估计电池模型参数,利用微观尺度估计电池SOC.但在现有研究中,同时考虑锂离子电池模型参数变化与噪声调整的研究较少. ...
梯次利用锂离子电池等效模型参数在线辨识方法
1
2021
... 其次,EKF是基于模型的算法,锂离子电池老化过程中模型参数会发生明显变化,进而造成SOC估算准确性大幅下降.为减小由于模型参数不准确而导致的估算误差,陈玉珊等[11 ] 采用含遗忘因子的递推最小二乘算法实时估计电池模型参数.杜帮华等[12 ] 提出可变遗忘因子的递推最小二乘法,通过不断更新遗忘因子更好地实时跟踪电池特性.Xiong等[13 ] 提出多尺度扩展卡尔曼滤波即利用宏观尺度估计电池模型参数,利用微观尺度估计电池SOC.但在现有研究中,同时考虑锂离子电池模型参数变化与噪声调整的研究较少. ...
An online identification method for equivalent model parameters of aging lithium-ion batteries
1
2021
... 其次,EKF是基于模型的算法,锂离子电池老化过程中模型参数会发生明显变化,进而造成SOC估算准确性大幅下降.为减小由于模型参数不准确而导致的估算误差,陈玉珊等[11 ] 采用含遗忘因子的递推最小二乘算法实时估计电池模型参数.杜帮华等[12 ] 提出可变遗忘因子的递推最小二乘法,通过不断更新遗忘因子更好地实时跟踪电池特性.Xiong等[13 ] 提出多尺度扩展卡尔曼滤波即利用宏观尺度估计电池模型参数,利用微观尺度估计电池SOC.但在现有研究中,同时考虑锂离子电池模型参数变化与噪声调整的研究较少. ...
A data-driven multi-scale extended Kalman filtering based parameter and state estimation approach of lithium-ion polymer battery in electric vehicles
1
2014
... 其次,EKF是基于模型的算法,锂离子电池老化过程中模型参数会发生明显变化,进而造成SOC估算准确性大幅下降.为减小由于模型参数不准确而导致的估算误差,陈玉珊等[11 ] 采用含遗忘因子的递推最小二乘算法实时估计电池模型参数.杜帮华等[12 ] 提出可变遗忘因子的递推最小二乘法,通过不断更新遗忘因子更好地实时跟踪电池特性.Xiong等[13 ] 提出多尺度扩展卡尔曼滤波即利用宏观尺度估计电池模型参数,利用微观尺度估计电池SOC.但在现有研究中,同时考虑锂离子电池模型参数变化与噪声调整的研究较少. ...
A survey of mathematics-based equivalent-circuit and electrochemical battery models for hybrid and electric vehicle simulation
1
2014
... 用于SOC估算的锂离子电池模型主要可分为电化学模型和等效电路模型[14 ] .电化学模型过于复杂,不适用于电池仿真和控制[15 ] .常见的等效电路模型包括Rint模型、新一代汽车协商会模型、一阶RC模型以及二阶RC模型等,采用精度较高且易建立的二阶RC模型[16 -17 ] 用于SOC估算,该模型的电路结构如图1 所示.图中:U 为电池的端电压;I 为电池的工作电流;R o 为电池欧姆内阻;R L 、C L 分别为电池的电化学极化电阻和电容;R S 、C S 分别为电池的浓度差极化电阻和电容;U oc 为电池的开路电压(open circuit voltage,OCV). ...
Multi-level model reduction and data-driven identification of the lithium-ion battery
1
2020
... 用于SOC估算的锂离子电池模型主要可分为电化学模型和等效电路模型[14 ] .电化学模型过于复杂,不适用于电池仿真和控制[15 ] .常见的等效电路模型包括Rint模型、新一代汽车协商会模型、一阶RC模型以及二阶RC模型等,采用精度较高且易建立的二阶RC模型[16 -17 ] 用于SOC估算,该模型的电路结构如图1 所示.图中:U 为电池的端电压;I 为电池的工作电流;R o 为电池欧姆内阻;R L 、C L 分别为电池的电化学极化电阻和电容;R S 、C S 分别为电池的浓度差极化电阻和电容;U oc 为电池的开路电压(open circuit voltage,OCV). ...
A comparative study of different equivalent circuit models for estimating state-of-charge of lithium-ion batteries
2
2018
... 用于SOC估算的锂离子电池模型主要可分为电化学模型和等效电路模型[14 ] .电化学模型过于复杂,不适用于电池仿真和控制[15 ] .常见的等效电路模型包括Rint模型、新一代汽车协商会模型、一阶RC模型以及二阶RC模型等,采用精度较高且易建立的二阶RC模型[16 -17 ] 用于SOC估算,该模型的电路结构如图1 所示.图中:U 为电池的端电压;I 为电池的工作电流;R o 为电池欧姆内阻;R L 、C L 分别为电池的电化学极化电阻和电容;R S 、C S 分别为电池的浓度差极化电阻和电容;U oc 为电池的开路电压(open circuit voltage,OCV). ...
... Comparison of errors in estimation of battery
ξ SOC using different algorithms
Tab.4 工况 ADEKF 对比算法 δ MAE /%δ ME /%收敛 算法 δ MAE /% DST 0.92 3.93 171 CNN-GUR[30 ] 1.28 BBDST 0.89 3.92 112 BP-EKF[31 ] 1.17 US06 0.91 2.96 8 EMD-GUR[32 ] 1.30 FUDS 0.68 3.15 57 AUKF[16 ] 0.81
由表4 分析可知,4种工况下,ADEKF算法估算锂离子电池SOC的δ MAE 均小于1%,并且在复杂工况下算法δ MAE 小、收敛时间短.在使用相同数据验证的情况下,本文算法相比于其他3种算法,在不同工况下估算精度均有一定提升.DST工况下,相比于CNN-GUR算法δ MAE 降低28.125%.BBDST工况下,在初值设置均偏离正确值的情况下,相比于BP-EKF算法δ MAE 降低23.932%.US06工况下,相比于EMD-GUR算法δ MAE 降低29.908%.FUDS工况下,相比于AUKF算法δ MAE 降低16.049%.采用马里兰数据集验证并将验证结果与其他算法对比,发现ADEKF算法兼具准确度高、鲁棒性强和工况容忍性强的优点,具有明显优势. ...
Data-driven state-of-charge estimator for electric vehicles battery using robust extended Kalman filter
1
2014
... 用于SOC估算的锂离子电池模型主要可分为电化学模型和等效电路模型[14 ] .电化学模型过于复杂,不适用于电池仿真和控制[15 ] .常见的等效电路模型包括Rint模型、新一代汽车协商会模型、一阶RC模型以及二阶RC模型等,采用精度较高且易建立的二阶RC模型[16 -17 ] 用于SOC估算,该模型的电路结构如图1 所示.图中:U 为电池的端电压;I 为电池的工作电流;R o 为电池欧姆内阻;R L 、C L 分别为电池的电化学极化电阻和电容;R S 、C S 分别为电池的浓度差极化电阻和电容;U oc 为电池的开路电压(open circuit voltage,OCV). ...
基于双充电状态的锂离子电池健康状态估计
1
2022
... 实验在室温25 ℃下进行,实验平台为蓝电CT2001B电池测试仪,实验对象为日本松下公司生产的额定容量为3.4 A·h的NCR18650B型三元锂离子电池.为了获得不同老化程度的锂离子电池样品,以0.5C倍率电流对4个同批次的电池进行老化实验[18 ] ,得到健康状态(State of Health,ζ SOH )分别为94.9%、90.8%、84.6%和79.2%的老化电池并与新电池(ζ SOH =100%)组成本文实验样品组. ...
State of health estimation of lithium-ion batteries based on dual charging state
1
2022
... 实验在室温25 ℃下进行,实验平台为蓝电CT2001B电池测试仪,实验对象为日本松下公司生产的额定容量为3.4 A·h的NCR18650B型三元锂离子电池.为了获得不同老化程度的锂离子电池样品,以0.5C倍率电流对4个同批次的电池进行老化实验[18 ] ,得到健康状态(State of Health,ζ SOH )分别为94.9%、90.8%、84.6%和79.2%的老化电池并与新电池(ζ SOH =100%)组成本文实验样品组. ...
1
2016
... 为获得不同老化程度锂离子电池的SOC-OCV曲线,以实际测得的电池实际容量为基准,用0.5C倍率分别对样品组中的5个电池进行脉冲放电实验[19 ] :①将电池充满电后静置3 h获得电池ξ SOC =100%时的开路电压;②以0.5C电流放出电池5%的电量并静置获得对应SOC下的开路电压;③重复步骤①~②直到将电池电量放完. ...
1
2016
... 为获得不同老化程度锂离子电池的SOC-OCV曲线,以实际测得的电池实际容量为基准,用0.5C倍率分别对样品组中的5个电池进行脉冲放电实验[19 ] :①将电池充满电后静置3 h获得电池ξ SOC =100%时的开路电压;②以0.5C电流放出电池5%的电量并静置获得对应SOC下的开路电压;③重复步骤①~②直到将电池电量放完. ...
电动汽车用锂离子电池SOC估算方法综述
1
2021
... 利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整. ...
Review of estimation methods on SOC of lithium-ion batteries in electric vehicles
1
2021
... 利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整. ...
变论域双模糊控制器在锂电池均衡策略仿真中的应用
1
2020
... 利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整. ...
Application of variable universe double fuzzy controller in simulation of lithium battery equilibrium strategy
1
2020
... 利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整. ...
基于自适应平方根无迹卡尔曼滤波算法的锂离子电池SOC和SOH估计
1
2018
... 利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整. ...
State of charge and state of health estimation of Li-ion batteries based on adaptive square-root unscented Kalman filters
1
2018
... 利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整. ...
SoC estimation of lithium battery based on AEKF algorithm
1
2017
... 利用EKF进行SOC估算时,认为系统中的过程噪声和测量噪声都是高斯白噪声,即其对应的误差协方差Q 和R 为固定值.然而实际的电池系统非常复杂,与此假设并不相符,这样的处理方法忽略了噪声变化,会造成SOC估算误差.针对系统噪声不固定这一问题的改进方法是根据测量值与估算值之间的差值来自适应调整系统噪声,改善因噪声值引起的估算误差大和发散等问题[10 ,20 ] .使噪声自适应的方法有基于模糊控制的自适应卡尔曼滤波[21 ] 、Sage-Husa自适应方法[22 ] 、极大似然准则的自适应卡尔曼滤波[23 ] 3种.基于模糊控制的自适应卡尔曼滤波原理较为复杂,涉及到模糊控制器的设计,实现起来也相对困难;Sage-Husa自适应卡尔曼滤波法相比极大似然准则的自适应卡尔曼滤波法,未知参数更多,增加了应用实现的复杂度,因此采用极大似然准则对噪声进行自适应调整. ...
双自适应衰减卡尔曼滤波锂电池荷电状态估计
2
2018
... 极大似然估计是从系统量测量出现概率最大的角度进行估计,其特点是不仅考虑新息的变化,而且考虑新息协方差矩阵的变化规律[24 ] ,通过统计系统量测新息序列,实现对系统的噪声协方差矩阵的实时更新.具体公式如下: ...
... 由式(9)和(10)可知,过程噪声协方差Q 和测量噪声协方差R 都能通过影响卡尔曼滤波增益K ,影响最终估算效果.Q 间接影响K ,Q 增大,会使K 增大或减小;R 直接影响K ,R 越大,K 就越小,观测值对状态预测值的反馈调整作用也就越弱. 对Q 、R 进行自适应调整时,存在3种不同的调整策略:①同时调整Q 和R [24 ] ;②固定Q ,只调整R ;③固定R ,只调整Q. 由文献[25 ]可知,第1种策略的滤波过程不稳定,可能会导致滤波发散,不可取. 对后两种策略,通过分析式(15)可知,R 要受到观测函数的导数阵Ck 的直接影响,而此处的观测函数是不连续函数,如果采用第2种策略,在自适应调整过程中,会使R 在断点处出现较大波动,因此采用第3种策略更好. ...
An estimation method for state of charge of lithium-ion batteries using dual adaptive fading extended Kalman filter
2
2018
... 极大似然估计是从系统量测量出现概率最大的角度进行估计,其特点是不仅考虑新息的变化,而且考虑新息协方差矩阵的变化规律[24 ] ,通过统计系统量测新息序列,实现对系统的噪声协方差矩阵的实时更新.具体公式如下: ...
... 由式(9)和(10)可知,过程噪声协方差Q 和测量噪声协方差R 都能通过影响卡尔曼滤波增益K ,影响最终估算效果.Q 间接影响K ,Q 增大,会使K 增大或减小;R 直接影响K ,R 越大,K 就越小,观测值对状态预测值的反馈调整作用也就越弱. 对Q 、R 进行自适应调整时,存在3种不同的调整策略:①同时调整Q 和R [24 ] ;②固定Q ,只调整R ;③固定R ,只调整Q. 由文献[25 ]可知,第1种策略的滤波过程不稳定,可能会导致滤波发散,不可取. 对后两种策略,通过分析式(15)可知,R 要受到观测函数的导数阵Ck 的直接影响,而此处的观测函数是不连续函数,如果采用第2种策略,在自适应调整过程中,会使R 在断点处出现较大波动,因此采用第3种策略更好. ...
一种基于极大似然准则的自适应卡尔曼滤波算法
1
2005
... 由式(9)和(10)可知,过程噪声协方差Q 和测量噪声协方差R 都能通过影响卡尔曼滤波增益K ,影响最终估算效果.Q 间接影响K ,Q 增大,会使K 增大或减小;R 直接影响K ,R 越大,K 就越小,观测值对状态预测值的反馈调整作用也就越弱. 对Q 、R 进行自适应调整时,存在3种不同的调整策略:①同时调整Q 和R [24 ] ;②固定Q ,只调整R ;③固定R ,只调整Q. 由文献[25 ]可知,第1种策略的滤波过程不稳定,可能会导致滤波发散,不可取. 对后两种策略,通过分析式(15)可知,R 要受到观测函数的导数阵Ck 的直接影响,而此处的观测函数是不连续函数,如果采用第2种策略,在自适应调整过程中,会使R 在断点处出现较大波动,因此采用第3种策略更好. ...
An adaptive Kalman filtering algorithm based on maximum-likelihood criterion
1
2005
... 由式(9)和(10)可知,过程噪声协方差Q 和测量噪声协方差R 都能通过影响卡尔曼滤波增益K ,影响最终估算效果.Q 间接影响K ,Q 增大,会使K 增大或减小;R 直接影响K ,R 越大,K 就越小,观测值对状态预测值的反馈调整作用也就越弱. 对Q 、R 进行自适应调整时,存在3种不同的调整策略:①同时调整Q 和R [24 ] ;②固定Q ,只调整R ;③固定R ,只调整Q. 由文献[25 ]可知,第1种策略的滤波过程不稳定,可能会导致滤波发散,不可取. 对后两种策略,通过分析式(15)可知,R 要受到观测函数的导数阵Ck 的直接影响,而此处的观测函数是不连续函数,如果采用第2种策略,在自适应调整过程中,会使R 在断点处出现较大波动,因此采用第3种策略更好. ...
锂离子电池荷电状态估算方法及其应用场景综述
1
2022
... 电池内部参数会受到SOC、充放电电流、温度、电池寿命等因素的影响[26 ] 而不断变化,为了提高SOC的估算精度,需对电池模型参数进行实时在线估算.但如果对所有电池模型参数都做实时估算,算法太过复杂;而考虑到在各种影响因素中,电池寿命的影响最大,并且极化内阻、极化电容受电池寿命影响小,欧姆内阻在电池寿命初期和后期会有较大变化[27 ] ,因此只在线估算电池欧姆内阻. ...
Review on estimation methods for state of charge of lithium-ion battery and their application scenarios
1
2022
... 电池内部参数会受到SOC、充放电电流、温度、电池寿命等因素的影响[26 ] 而不断变化,为了提高SOC的估算精度,需对电池模型参数进行实时在线估算.但如果对所有电池模型参数都做实时估算,算法太过复杂;而考虑到在各种影响因素中,电池寿命的影响最大,并且极化内阻、极化电容受电池寿命影响小,欧姆内阻在电池寿命初期和后期会有较大变化[27 ] ,因此只在线估算电池欧姆内阻. ...
锂离子电池内阻辨识及其在寿命估计中的应用
1
2009
... 电池内部参数会受到SOC、充放电电流、温度、电池寿命等因素的影响[26 ] 而不断变化,为了提高SOC的估算精度,需对电池模型参数进行实时在线估算.但如果对所有电池模型参数都做实时估算,算法太过复杂;而考虑到在各种影响因素中,电池寿命的影响最大,并且极化内阻、极化电容受电池寿命影响小,欧姆内阻在电池寿命初期和后期会有较大变化[27 ] ,因此只在线估算电池欧姆内阻. ...
Internal resistance identification of Li-ion battery and its application in battery life estimation
1
2009
... 电池内部参数会受到SOC、充放电电流、温度、电池寿命等因素的影响[26 ] 而不断变化,为了提高SOC的估算精度,需对电池模型参数进行实时在线估算.但如果对所有电池模型参数都做实时估算,算法太过复杂;而考虑到在各种影响因素中,电池寿命的影响最大,并且极化内阻、极化电容受电池寿命影响小,欧姆内阻在电池寿命初期和后期会有较大变化[27 ] ,因此只在线估算电池欧姆内阻. ...
双卡尔曼滤波算法在锂电池SOC估算中的应用
1
2013
... 欧姆内阻随电池寿命的变化缓慢,短时间内可认为基本不变[28 ] ,从而可以得到其状态方程: ...
Application of dual extended Kalman filtering algorithm in the state-of-charge estimation of lithium-ion battery
1
2013
... 欧姆内阻随电池寿命的变化缓慢,短时间内可认为基本不变[28 ] ,从而可以得到其状态方程: ...
Influence of different open circuit voltage tests on state of charge online estimation for lithium-ion batteries
1
2016
... 选用马里兰数据集中额定容量为2 A·h的 18 650 型三元锂离子电池数据验证复杂工况下ADEKF算法准确度,验证选择实际初始容量为 1.997 6 A·h的电池2在实验温度为25 ℃下的实验数据.数据提供了电池2的脉冲实验数据以及在4种常用电动汽车测试工况DST、BBDST、US06和FUDS的测试数据[29 ] .电池模型以及模型参数设置均与利用自有实验数据验证算法时相同,采用了1.1节和1.3节中所描述的方法.各工况测试中电池实际初始SOC均为80%,为验证算法收敛性,算法中取ξ SOC.0 =1. 4种工况下ADEKF算法估算误差如图8 和表4 所示. ...
基于CEEMDAN和ISOA-ELM的锂电池荷电状态预测
1
2023
... Comparison of errors in estimation of battery
ξ SOC using different algorithms
Tab.4 工况 ADEKF 对比算法 δ MAE /%δ ME /%收敛 算法 δ MAE /% DST 0.92 3.93 171 CNN-GUR[30 ] 1.28 BBDST 0.89 3.92 112 BP-EKF[31 ] 1.17 US06 0.91 2.96 8 EMD-GUR[32 ] 1.30 FUDS 0.68 3.15 57 AUKF[16 ] 0.81
由表4 分析可知,4种工况下,ADEKF算法估算锂离子电池SOC的δ MAE 均小于1%,并且在复杂工况下算法δ MAE 小、收敛时间短.在使用相同数据验证的情况下,本文算法相比于其他3种算法,在不同工况下估算精度均有一定提升.DST工况下,相比于CNN-GUR算法δ MAE 降低28.125%.BBDST工况下,在初值设置均偏离正确值的情况下,相比于BP-EKF算法δ MAE 降低23.932%.US06工况下,相比于EMD-GUR算法δ MAE 降低29.908%.FUDS工况下,相比于AUKF算法δ MAE 降低16.049%.采用马里兰数据集验证并将验证结果与其他算法对比,发现ADEKF算法兼具准确度高、鲁棒性强和工况容忍性强的优点,具有明显优势. ...
Lithium-ion battery state prediction based on CEEMDAN and ISOA-ELM
1
2023
... Comparison of errors in estimation of battery
ξ SOC using different algorithms
Tab.4 工况 ADEKF 对比算法 δ MAE /%δ ME /%收敛 算法 δ MAE /% DST 0.92 3.93 171 CNN-GUR[30 ] 1.28 BBDST 0.89 3.92 112 BP-EKF[31 ] 1.17 US06 0.91 2.96 8 EMD-GUR[32 ] 1.30 FUDS 0.68 3.15 57 AUKF[16 ] 0.81
由表4 分析可知,4种工况下,ADEKF算法估算锂离子电池SOC的δ MAE 均小于1%,并且在复杂工况下算法δ MAE 小、收敛时间短.在使用相同数据验证的情况下,本文算法相比于其他3种算法,在不同工况下估算精度均有一定提升.DST工况下,相比于CNN-GUR算法δ MAE 降低28.125%.BBDST工况下,在初值设置均偏离正确值的情况下,相比于BP-EKF算法δ MAE 降低23.932%.US06工况下,相比于EMD-GUR算法δ MAE 降低29.908%.FUDS工况下,相比于AUKF算法δ MAE 降低16.049%.采用马里兰数据集验证并将验证结果与其他算法对比,发现ADEKF算法兼具准确度高、鲁棒性强和工况容忍性强的优点,具有明显优势. ...
基于BP-多时间尺度UKF优化算法的SOC估计
1
... Comparison of errors in estimation of battery
ξ SOC using different algorithms
Tab.4 工况 ADEKF 对比算法 δ MAE /%δ ME /%收敛 算法 δ MAE /% DST 0.92 3.93 171 CNN-GUR[30 ] 1.28 BBDST 0.89 3.92 112 BP-EKF[31 ] 1.17 US06 0.91 2.96 8 EMD-GUR[32 ] 1.30 FUDS 0.68 3.15 57 AUKF[16 ] 0.81
由表4 分析可知,4种工况下,ADEKF算法估算锂离子电池SOC的δ MAE 均小于1%,并且在复杂工况下算法δ MAE 小、收敛时间短.在使用相同数据验证的情况下,本文算法相比于其他3种算法,在不同工况下估算精度均有一定提升.DST工况下,相比于CNN-GUR算法δ MAE 降低28.125%.BBDST工况下,在初值设置均偏离正确值的情况下,相比于BP-EKF算法δ MAE 降低23.932%.US06工况下,相比于EMD-GUR算法δ MAE 降低29.908%.FUDS工况下,相比于AUKF算法δ MAE 降低16.049%.采用马里兰数据集验证并将验证结果与其他算法对比,发现ADEKF算法兼具准确度高、鲁棒性强和工况容忍性强的优点,具有明显优势. ...
State of charge estimation based on BP-UKF optimization algorithm
1
... Comparison of errors in estimation of battery
ξ SOC using different algorithms
Tab.4 工况 ADEKF 对比算法 δ MAE /%δ ME /%收敛 算法 δ MAE /% DST 0.92 3.93 171 CNN-GUR[30 ] 1.28 BBDST 0.89 3.92 112 BP-EKF[31 ] 1.17 US06 0.91 2.96 8 EMD-GUR[32 ] 1.30 FUDS 0.68 3.15 57 AUKF[16 ] 0.81
由表4 分析可知,4种工况下,ADEKF算法估算锂离子电池SOC的δ MAE 均小于1%,并且在复杂工况下算法δ MAE 小、收敛时间短.在使用相同数据验证的情况下,本文算法相比于其他3种算法,在不同工况下估算精度均有一定提升.DST工况下,相比于CNN-GUR算法δ MAE 降低28.125%.BBDST工况下,在初值设置均偏离正确值的情况下,相比于BP-EKF算法δ MAE 降低23.932%.US06工况下,相比于EMD-GUR算法δ MAE 降低29.908%.FUDS工况下,相比于AUKF算法δ MAE 降低16.049%.采用马里兰数据集验证并将验证结果与其他算法对比,发现ADEKF算法兼具准确度高、鲁棒性强和工况容忍性强的优点,具有明显优势. ...
基于经验模态分解的门控循环单元神经网络的锂离子电池荷电状态估计
1
2022
... Comparison of errors in estimation of battery
ξ SOC using different algorithms
Tab.4 工况 ADEKF 对比算法 δ MAE /%δ ME /%收敛 算法 δ MAE /% DST 0.92 3.93 171 CNN-GUR[30 ] 1.28 BBDST 0.89 3.92 112 BP-EKF[31 ] 1.17 US06 0.91 2.96 8 EMD-GUR[32 ] 1.30 FUDS 0.68 3.15 57 AUKF[16 ] 0.81
由表4 分析可知,4种工况下,ADEKF算法估算锂离子电池SOC的δ MAE 均小于1%,并且在复杂工况下算法δ MAE 小、收敛时间短.在使用相同数据验证的情况下,本文算法相比于其他3种算法,在不同工况下估算精度均有一定提升.DST工况下,相比于CNN-GUR算法δ MAE 降低28.125%.BBDST工况下,在初值设置均偏离正确值的情况下,相比于BP-EKF算法δ MAE 降低23.932%.US06工况下,相比于EMD-GUR算法δ MAE 降低29.908%.FUDS工况下,相比于AUKF算法δ MAE 降低16.049%.采用马里兰数据集验证并将验证结果与其他算法对比,发现ADEKF算法兼具准确度高、鲁棒性强和工况容忍性强的优点,具有明显优势. ...
State-of-charge estimation of lithium-ion battery based on gated recurrent unit using empirical mode decomposition
1
2022
... Comparison of errors in estimation of battery
ξ SOC using different algorithms
Tab.4 工况 ADEKF 对比算法 δ MAE /%δ ME /%收敛 算法 δ MAE /% DST 0.92 3.93 171 CNN-GUR[30 ] 1.28 BBDST 0.89 3.92 112 BP-EKF[31 ] 1.17 US06 0.91 2.96 8 EMD-GUR[32 ] 1.30 FUDS 0.68 3.15 57 AUKF[16 ] 0.81
由表4 分析可知,4种工况下,ADEKF算法估算锂离子电池SOC的δ MAE 均小于1%,并且在复杂工况下算法δ MAE 小、收敛时间短.在使用相同数据验证的情况下,本文算法相比于其他3种算法,在不同工况下估算精度均有一定提升.DST工况下,相比于CNN-GUR算法δ MAE 降低28.125%.BBDST工况下,在初值设置均偏离正确值的情况下,相比于BP-EKF算法δ MAE 降低23.932%.US06工况下,相比于EMD-GUR算法δ MAE 降低29.908%.FUDS工况下,相比于AUKF算法δ MAE 降低16.049%.采用马里兰数据集验证并将验证结果与其他算法对比,发现ADEKF算法兼具准确度高、鲁棒性强和工况容忍性强的优点,具有明显优势. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}