基于动态密度引导的多机器人编队队形变换方法
Dynamic Density-Guided Method for Multi-Robot Formation Transformation
基于动态密度引导的多机器人编队队形变换方法 |
| 曹凯, 陈阳泉, 李康, 陈超波, 阎坤, 刘伟超 |
|
Dynamic Density-Guided Method for Multi-Robot Formation Transformation |
| CAO Kai, CHEN Yangquan, LI Kang, CHEN Chaobo, YAN Kun, LIU Weichao |
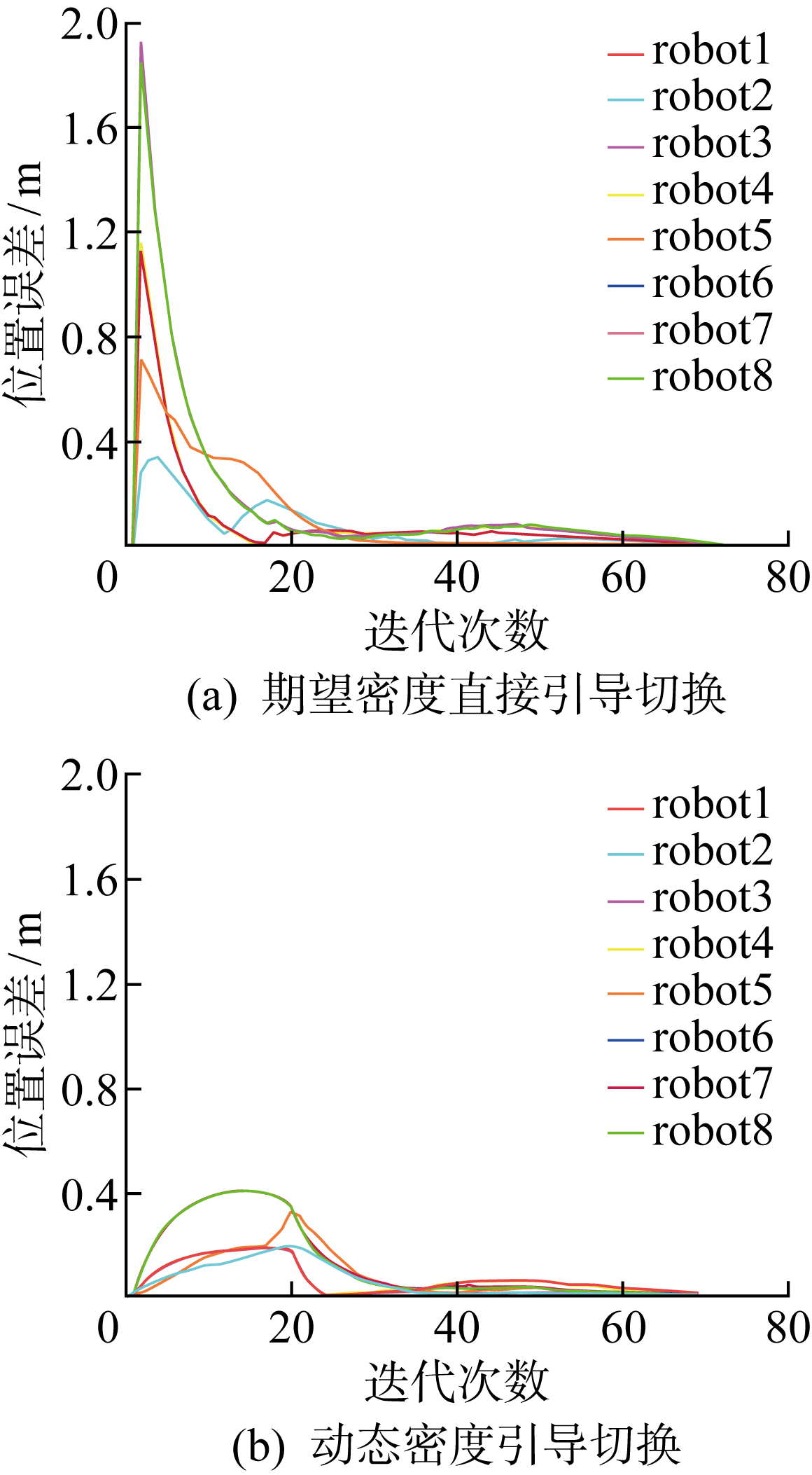
| 图9 仿真2队形切换过程机器人位置误差 |
| Fig.9 Robot position error in formation switching process of Simulation 2 |
|
|