基于动态密度引导的多机器人编队队形变换方法
Dynamic Density-Guided Method for Multi-Robot Formation Transformation
| ρ(q) | 密度分布 | 维诺图 | 队形 |
|---|---|---|---|
| $\mathrm{e}^{-\sigma(a x+b y+c)^{2}}$ |  |  | 直线形 |
| $\mathrm{e}^{-\sigma\left[a\left|x-x_{\mathrm{c}}\right|+b\left(y-y_{\mathrm{c}}\right)+c\right]^{2}}$ |  | 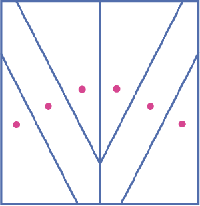 | V形 |
| $\mathrm{e}^{-\sigma\left[a\left(x-x_{\mathrm{c}}\right)^{2}+b\left(y-y_{\mathrm{c}}\right)^{2}-r^{2}\right]^{2}}$ |  | 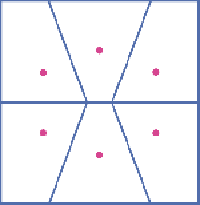 | 环形 |